2.2. The SWAT Model
The SWAT model is a physically based, watershed-scale simulation model jointly developed by the USDA Agricultural Research Service and Texas A&M AgriLife Research, part of the Texas A&M University System [
22,
23]. In SWAT, a watershed is divided into a number of sub-watersheds or sub-basins, which are further divided into hydrologic response units (HRUs) [
23,
47]. HRUs are lumped areas within the sub-basin that are comprised of unique land cover, soil, and slope. The model estimates relevant hydrologic components such as evapotranspiration, surface runoff, groundwater flow, and sediment yield for each HRU [
23]. The hydrologic cycle simulated by SWAT is based on the water balance equation [
23,
47]:
where
SWt is the final soil water content on day
i,
SW0 is the initial soil water content on day
i,
t is the time in days,
Rday is the amount of rainfall on day
i,
Qsurf is the amount of surface runoff on day
i,
Ea is the amount of evapotranspiration on day
i,
Wseep is the amount of water entering the vadose zone from the soil profile on day
i, and
Qgw is the amount of base flow or return flow on day
i.
The surface runoff was estimated by using the United States Department of Agriculture (USDA) Soil Conservation Services (SCS) runoff curve number (CN) approach [
22,
23,
48]. The CN is the function of land use, soil permeability, and antecedent soil moisture condition. The SCS equation [
48] is:
where
Qsurf is the accumulated runoff or rainfall access,
Rday is the rainfall depth of the day (mm H
2O),
Ia is the initial abstractions, which includes surface storage, interception and infiltration prior to runoff (mm H
2O), and
S is the retention parameter (mm H
2O). The retention parameter (
S) is dependent spatially to changes in soils, land use, management, and slope, and temporarily to changes in soil water content [
23]. The retention parameter (
S) [
23] is given by the equation
where
CN is the curve number for the day. The initial abstraction,
Ia, is usually approximated as 0.2
S, so equation 2 can be rewritten as
The SWAT offers three methods to estimate potential evapotranspiration (PET): the Penman-Monteith method, the Priestley-Taylor method, and the Hargreaves method [
23]. In our study, PET was estimated using the Penman/Monteith method, which requires solar radiation, air temperature, relative humidity, and wind speed as inputs. The Penman-Monteith equation [
49] is
where
is the latent heat flux density (MJ m
−2 d
−1),
E is the depth rate evaporation (mm d
−1),
is the slope of the saturation vapor pressure-temperature curve, de/dT (kPa °C
–1),
Hnet is the net radiation (MJ m
−2 d
−1),
G is the heat flux density to the ground (MJ m
−2 d
−1),
is the air density (kg m
−3),
cp is the specific heat at constant pressure (MJ kg
−1 °C
−1),
is the saturation vapor pressure of air at height
z (kPa),
is the water vapor pressure of air at height
z (kPa),
is the psychometric constant (kPa °C
−1),
is the plant canopy resistance (s m
−1), and
is the diffusion resistance of the air layer (aerodynamic resistance) (s m
−1) [
23]. Upon determination of PET, the actual evapotranspiration (ET) was calculated with the method similar to that suggested by Richtie [
50].
The sediment component for each HRU was calculated using the modified universal soil loss equation (MUSLE). The MUSLE [
51] is
where
sed is the sediment yield on a given day (metric tons),
Qsurf is the surface runoff volume (mm H
2O/ha),
qpeak is the peak runoff rate (m
3/s),
areahru is the area of HRU (ha),
KUSLE is the USLE soil erodibility factor (0.013 metric ton m
2 hr/m
3-metric ton cm),
CUSLE is the USLE cover and management factor,
PUSLE is the USLE support practice factor,
LSUSLE is the USLE topographic factor, and
CFRG is the coarse fragment factor. More details on SWAT can be found in the Soil and Water Assessment Tool theoretical documentation version 2009 (
https://swat.tamu.edu/docs/, accessed on 20 December 2020) [
22,
23].
2.4. SWAT Model Setup
ArcSWAT 2012, an ArcGIS extension and interface for SWAT, was used to simulate the SWAT model. ArcSWAT interface is a public domain software, and as such may be used freely [
47]. ArcSWAT extension for ArcGIS and documentation are available as downloads (
https://swat.tamu.edu/software/arcswat/ accessed on 20 December 2020). Based on ArcSWAT, the SWAT model data preparation is characterized by three modules: (1) the SWAT Watershed Delineator, which allows the users to discretize the watershed and sub-watersheds using the data derived from the digital elevation model (DEM); (2) the SWAT HRU Analysis Tool, which combines data derived from LULC, soil characteristics, and slope variations to discretize the HRUs; and (3) the SWAT Input Editor, which allows the user to create an input database and modify various model parameters.
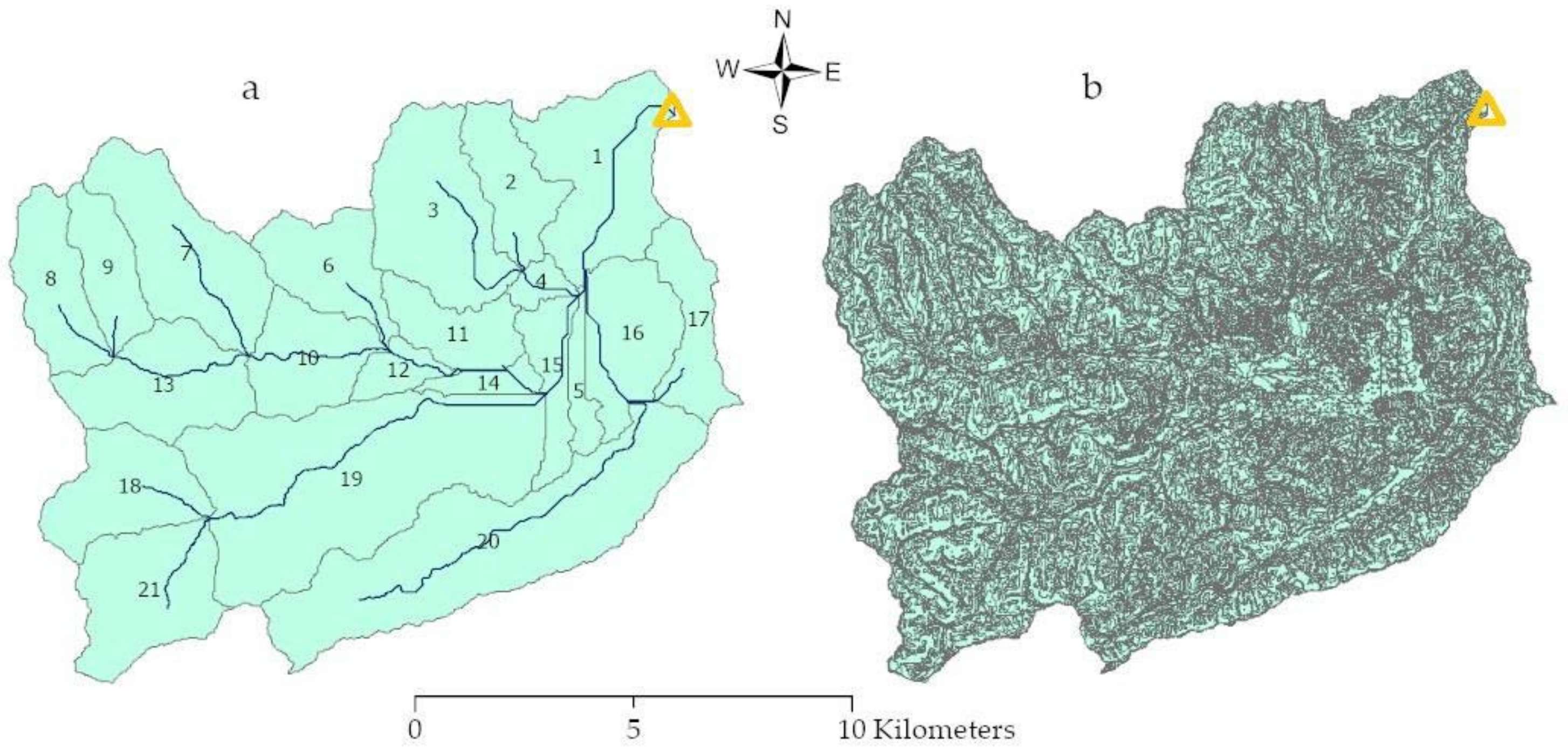
A threshold critical source area of 350 ha (between the suggested range by ArcGIS watershed delineation interface) was used for this study, which divided the watershed into 21 sub-basins (
Figure 3a). It was based on the understanding that a smaller threshold generates a denser stream network in the watershed [
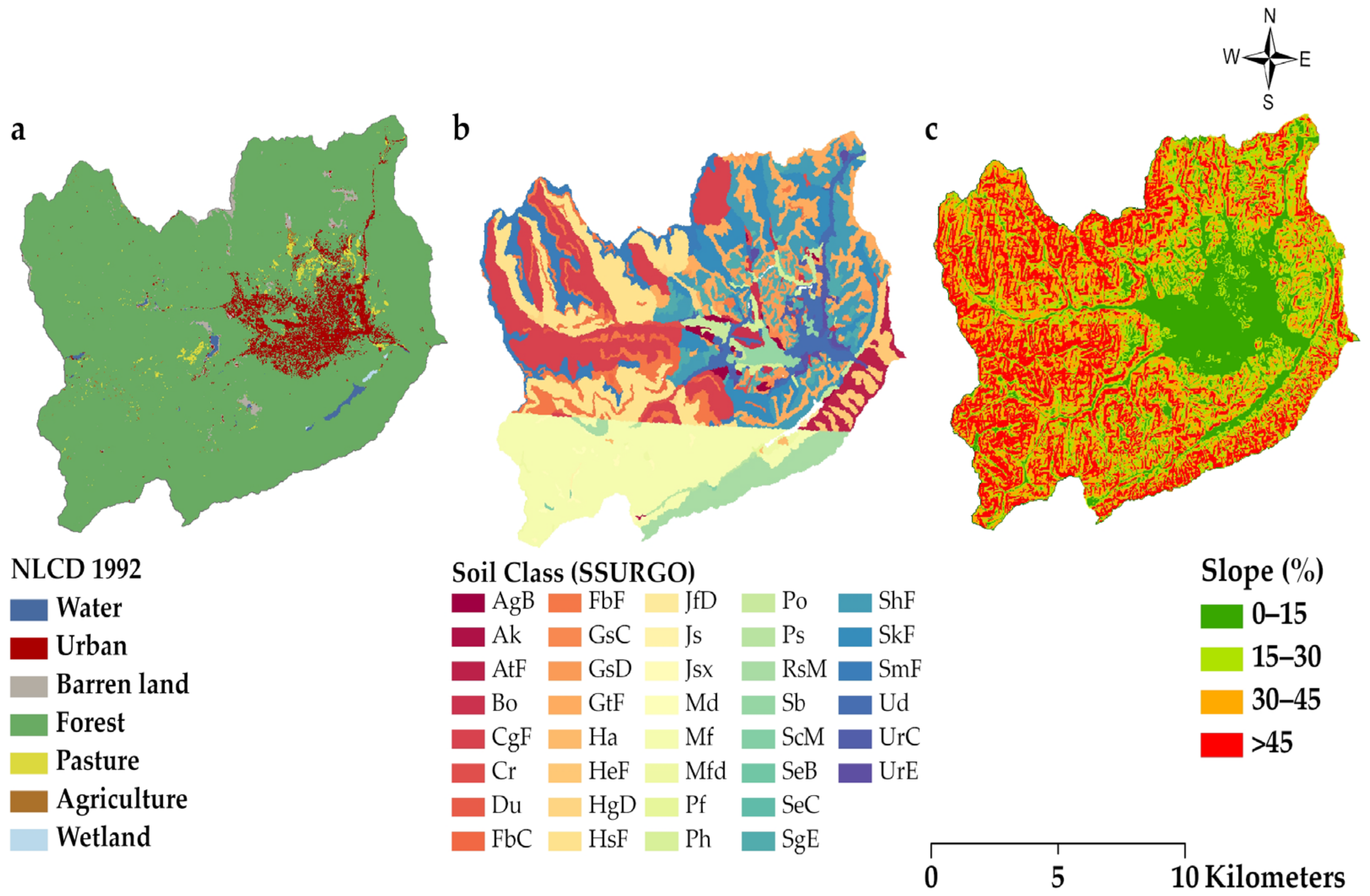
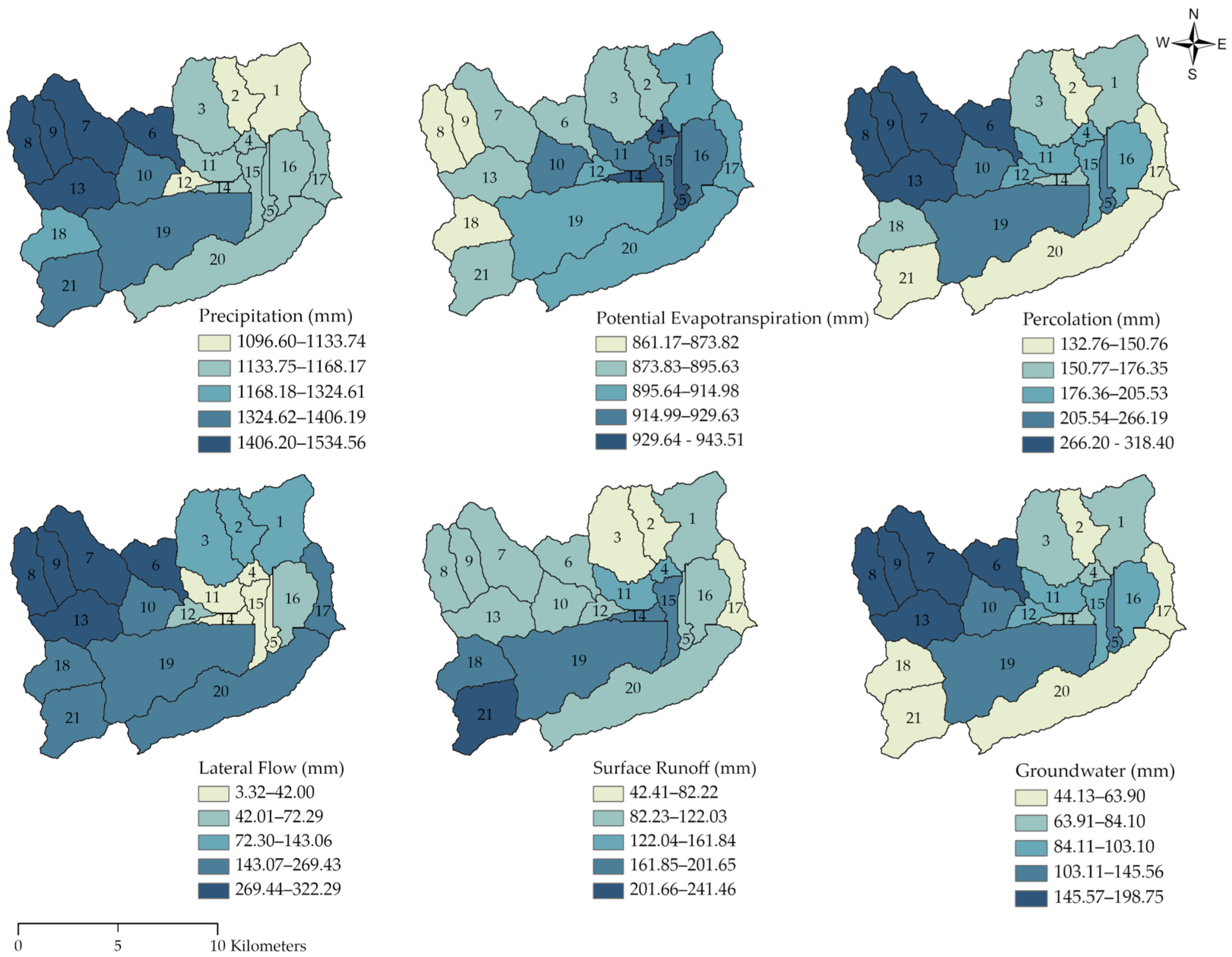
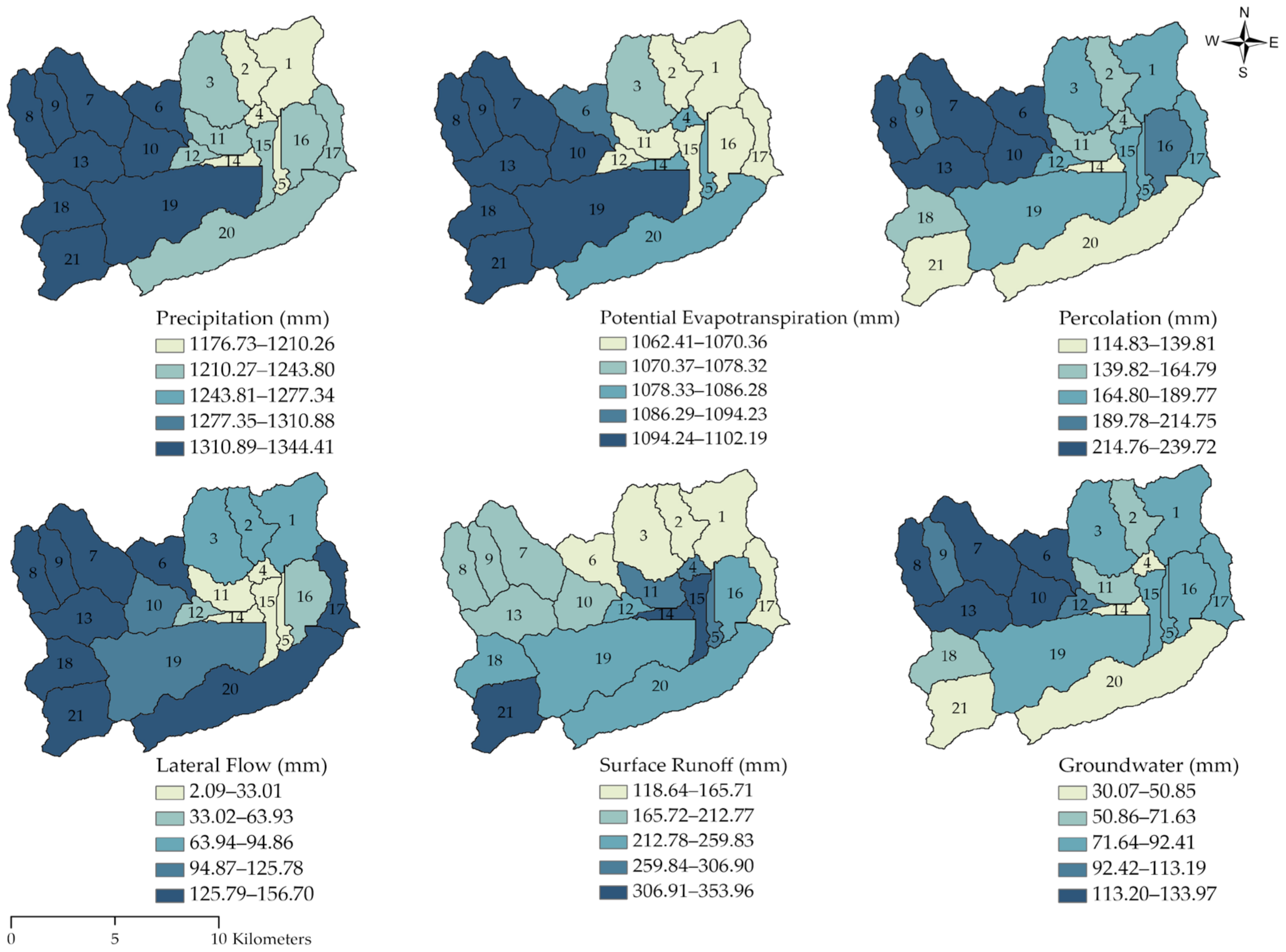
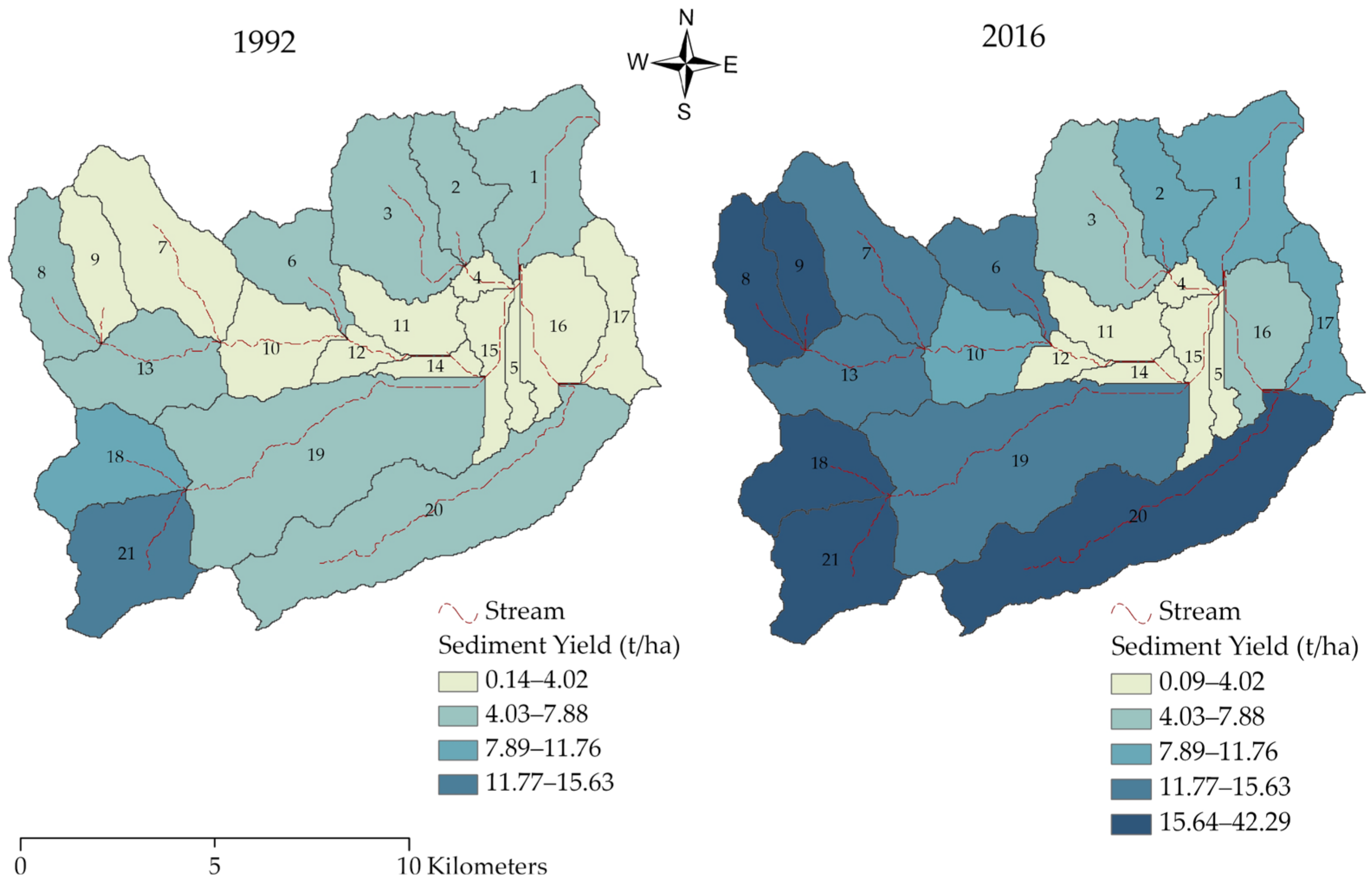
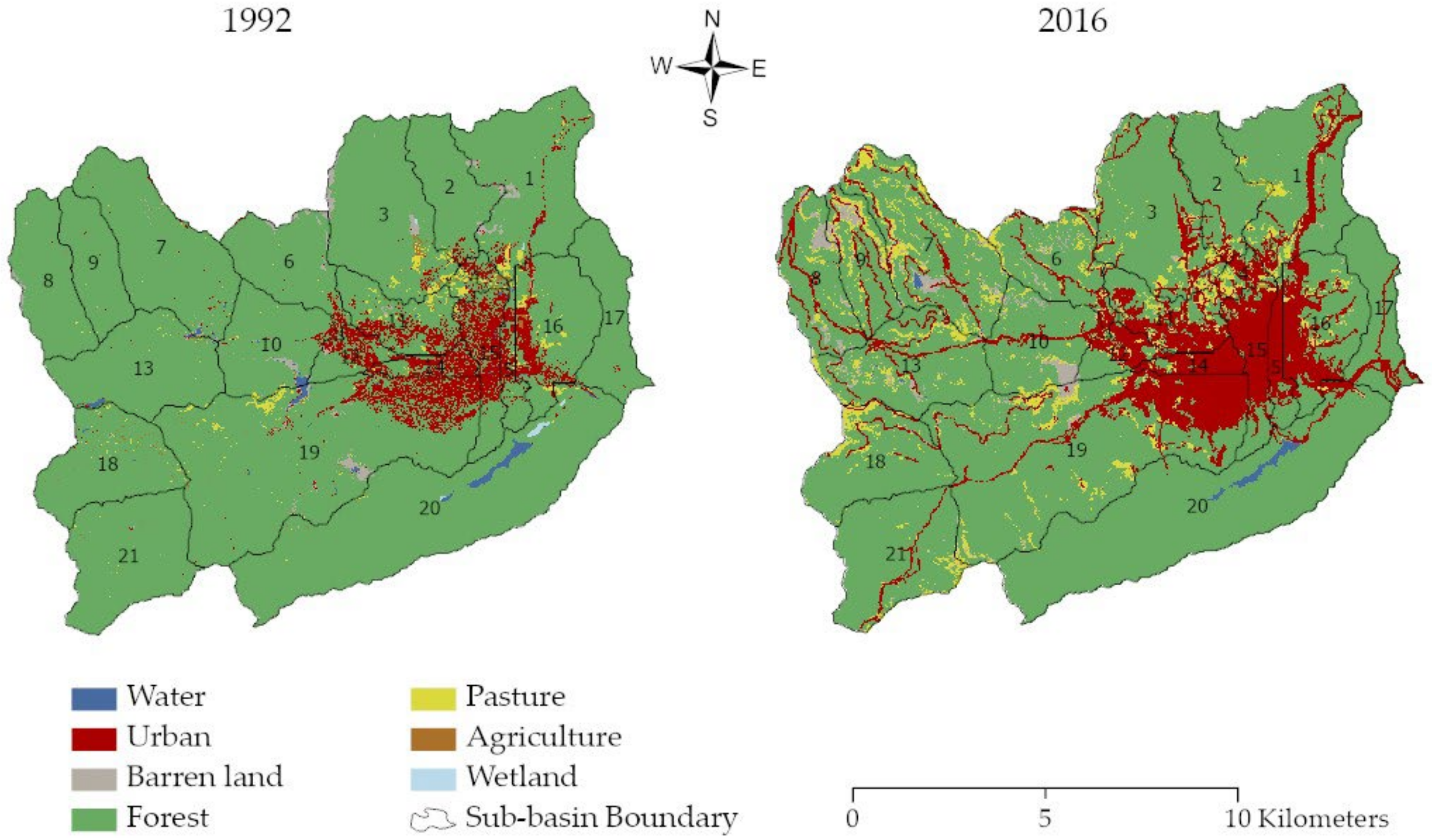
53]. The LULC maps of 1992 (NLCD) and 2016 (CropScape-Cropland Data) were aggregated into seven LULC types: Water, Urban, Barren, Forest, Pasture, Agriculture, and Wetland. SSURGO, a higher resolution soil map, defined 38 different soil types in the watershed. The slopes were classified into four classes: 0–15%, 15–30%, 30–45% and >45%. We opted out threshold (LULC/Soil/Slope: 0/0/0[%]) in HRU definition, which resulted in the further partition of sub-basins into 1847 HRUs (
Figure 3b).
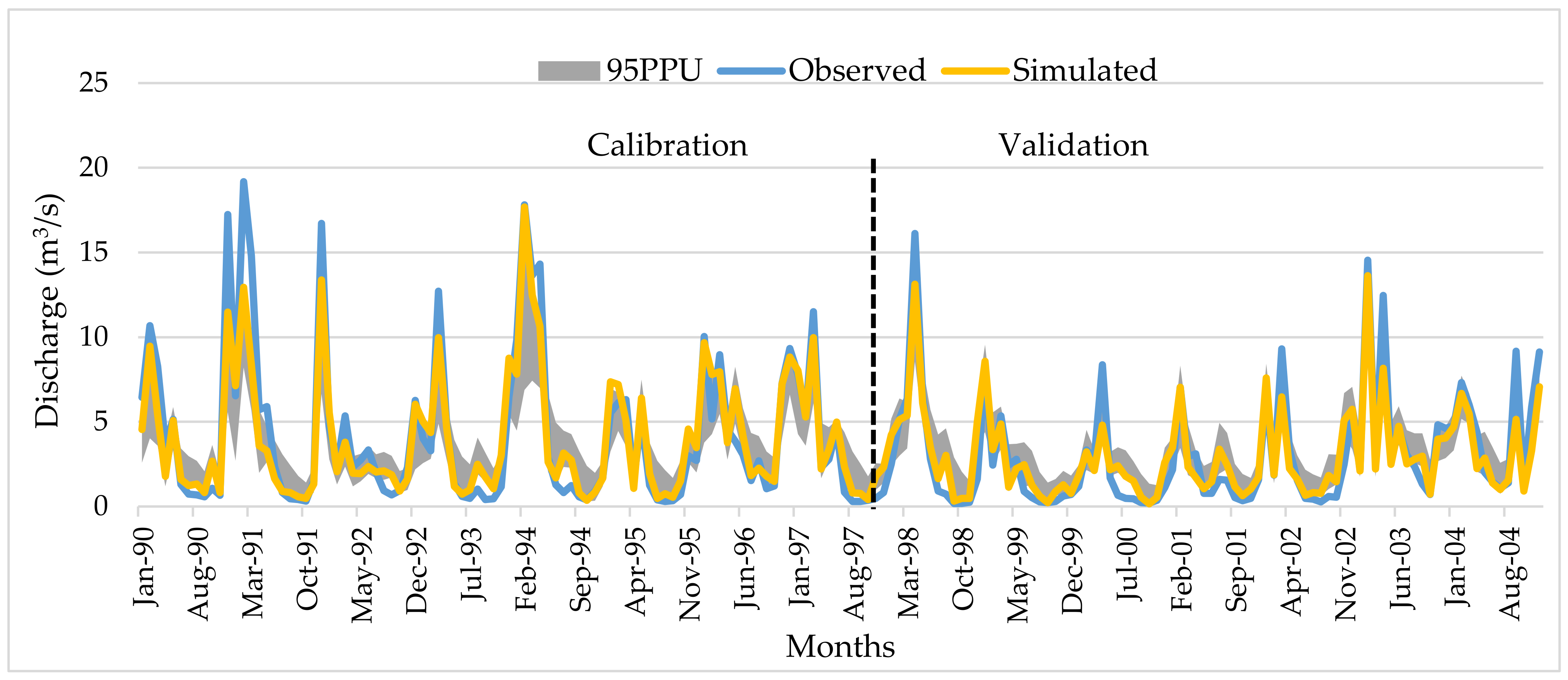
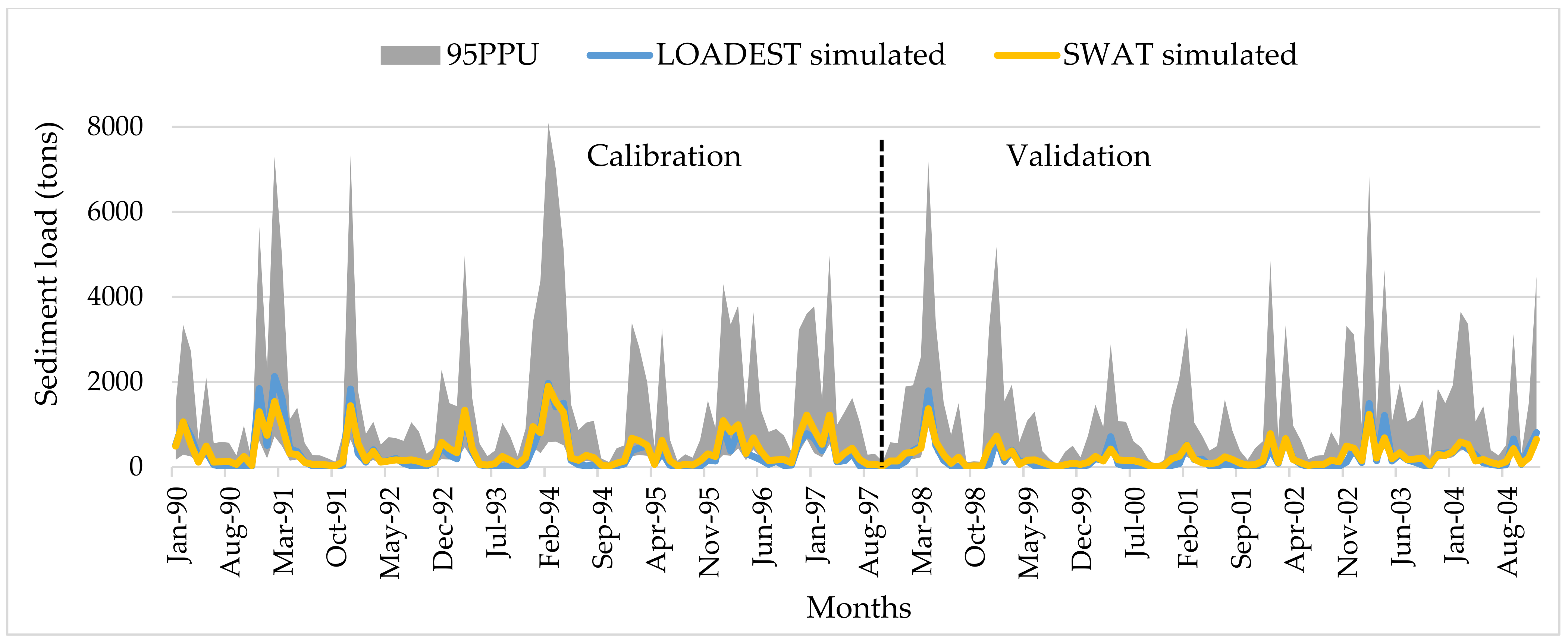
The SWAT model was set up to run for 18 years from 1 January 1987 to 31 December 2004. The period of 1 January 1987, to 31 December 1989, was considered a “warm-up” period. The remaining available years were divided into calibration and validation periods that extended from 1990–1997 and 1998–2004, respectively. After calibration and validation of the SWAT model based on LULC 1992, the model was rerun with the LULC of 2016 with the best parameter values for the 2005–2016 period.
2.5. SWAT-CUP Premium and SWAT Parameter Estimator (SPE) Algorithm
We used SWAT-CUP Premium (SWAT-CUPP), a computer program developed for calibration of the SWAT model (
https://www.2w2e.com/home/SwatCupPremium; accessed on 17 February 2021). SWAT-CUPP is an improved version of SWAT-CUP, which allows for behavioral and multi-objective calibration [
54].
SWAT-CUPP offers two algorithms, SWAT Parameter Estimator (SPE) and Particle Swarm Optimization (PSO). We used the SPE algorithm (previously Sequential Uncertainty Fitting (SUFI-2)) for model sensitivity analysis, calibration, uncertainty analysis, and validation [
5,
13]. In SPE, the algorithm maps all uncertainties (parameter, conceptual model, input, etc.) on the parameters (expressed as uniform distributions or ranges) and tries to capture most of the measured data within the 95% prediction uncertainty (95PPU) of the model in an iterative process determined at the 2.5% and 97.5% levels of cumulative distribution of output variables obtained through Latin hypercube sampling [
54,
55]. Users are provided with several choices of objective function (11 functions including the Nash-Sutcliffe Efficiency coefficient (
NSE), the coefficient of determination (
R2), and percent bias (
PBIAS)). We selected
NSE as our objective function in this study because it is recommended to be the best objective function for reflecting the overall fit of a hydrograph [
56,
57].
NSE is a normalized statistic that determines the relative magnitude of the residual variance compared to the measured data variance [
58].
NSE is computed as
where
is the
ith observation for the constituent being evaluated,
is the
ith simulated value for the constituent being evaluated,
is the mean of observed data for the constituent being evaluated, and
n is the total number of observations [
59]. The details of the SWAT-CUPP and SPE algorithms can be found in the SWAT-CUPP user manual [
54].
2.6. Model Sensitivity Analysis
Sensitivity analysis is the foremost step in the calibration and validation process in SWAT-CUPP, which determines the most sensitive parameters for a given watershed [
55]. SPE is embedded with two systems for sensitivity analysis (i.e., one-at-a-time and global). This study utilizes both: one-at-a-time sensitivity analysis to identify the sensitive parameters and global sensitivity analysis to define the rank of the model parameters.
One-at-a-time sensitivity analysis was conducted for each parameter while keeping other parameter values constant [
54]. In global sensitivity analysis, a multiple regression system regresses the Latin hypercube-generated parameters against objective function values to determine the sensitivity of the parameters [
54]. The sensitivity is calculated according to
where
g denotes the objective function,
b is the parameter,
is the regression constant,
corresponds to the technical coefficient attached to the variable
b, and
m is the number of parameters [
60].
In addition, statistical measurements
t-stat and
p-value were used to identify the sensitive parameters, with larger
t-stats and smaller
p-values representing greater sensitivity. Based on one-at-a-time sensitivity analysis, Abbaspour et al. [
60], and the relevant literature [
45,
47,
61], a total of 30 parameters (see
Table A2) were selected for global sensitivity analysis. To perform global sensitivity analysis, we ran our first iteration among 23 selected parameters for discharge. Our first iteration was run with 600 simulations. In our analysis, the larger the value of
t-stat (in absolute value) and the smaller the
p-value (
p < 0.05), the more sensitive the parameters were [
54]. Once the satisfactory calibration performance was obtained for discharge, sensitivity analysis was carried out for the sediment parameters with a similar approach. The initial parameter ranges were set according to the SWAT manual and available guidelines [
23,
47,
55] (see
Table A2).
The results of global sensitivity analysis after the first iteration are listed in
Table 2. The parameters related to groundwater (ALPHA_BF, GWQMN, GW_DELAY, and GW_REVAP), runoff curve number (CN2), channel routing (CH_K2 and CH_N2), soil (SOL_BD, SOL_AWC, SOL_K, and ESCO), snow (SFTMP and SMFMN), and topography (HRU_SLP and SLSUBBSN) were the most sensitive (
p < 0.05) to discharge. Sediment was most sensitive (
p < 0.05) to routing parameter (CH_N2), groundwater (GWQMN), runoff curve number (CN2), and channel re-entrained exponent parameter (SPEXP).
2.7. Model Calibration and Uncertainty Analysis
The second step is model calibration, in which parameter value ranges are adjusted to improve the fit between model predictions and real-world observations [
47]. SWAT-CUPP allows users to select specific model parameters for auto-calibration within their acceptable ranges (see
Table A2) and execute hundreds of SWAT simulations to find the optimal set of parameter values that minimizes the error between model predictions and observed data [
54,
55]. During calibration of parameters, only sensitive parameters (
Table 2) were calibrated based on the results of the sensitivity analysis in SWAT-CUPP.
Calibration is characteristically subjective and, therefore, closely linked to model output uncertainty [
24,
55]. The term uncertainty analysis refers to the propagation of all model input errors and uncertainties to model outputs. In SWAT-CUPP, two indices referred to as “
P-factor” and “
R-factor” are used to quantify the fit between simulation results [
24,
47,
55,
60]. The
P-factor is the fraction of measured data (plus its error) bracketed by the
95PPU band, and the average distance
between the upper and the lower
95PPU (or the degree of uncertainty) estimated from
where
k is the number of observed data points,
is a counter and
(2.5th) and
(97.5th) represent the lower and upper boundaries of the
95PPU [
54,
55,
60]. The
P-factor varies from 0 to 1, where 1 indicates 100% bracketing of the measured data within model prediction uncertainty (i.e., a perfect model simulation considering the uncertainty). The
R-factor is the ratio of the average width of the
95PPU band and the standard deviation of the measured variable. The
R-factor is estimated by
where
is the standard deviation of the measured variable
X. The
P-factor value of >0.7 (at least 70%) and
R-factor value of <1.5 (at most 150%) are desirable and recommended to be adequate [
60,
62]. However, depending on the project scale and availability of input and calibration data, these requirements can be adaptable [
24,
60,
62]. In general, a larger
P-factor can be achieved at the cost of a larger
R-factor. A balance between the two must, therefore, always be considered. When appropriate values of
R-factor and
P-factor are achieved, the parameter ranges are taken as the calibration parameters in the final iteration. However, it is important to understand that there is no single good solution representing model output but rather an envelope of good solutions expressed by the
95PPU, with certain parameter ranges [
24].
2.8. Model Validation
After calibration, the model is validated with the calibrated parameter ranges and by comparing predictions to additional observed data, which is not used for calibration. Based on the level of agreement between predictions and the additional observations, the model is validated for further use, or model inputs and parameters are revisited for further calibration [
47,
56]. Similar to calibration, validation results are also quantified by the
P-factor and
R-factor.
The initial model obtained from ArcSWAT was divided into two periods, 1990–1997 for calibration and 1998–2004 for validation in SWAT-CUPP. Discharge was calibrated first since it is the primary controlling variable [
54]. After running the one-at-a-time sensitivity analysis and following the literature [
5,
24,
45,
61], the model was parameterized, and ranges were assigned. The model was run for three iterations (600 simulations each) for calibration. After each iteration, new parameter ranges were suggested, which were used for another round of iteration. Finally, the model was run for another iteration (600 simulations) with the calibrated parameter ranges for validation. A similar procedure was applied for the calibration and validation of sediment.
Parallel processing was utilized to speed up the calibration process. The parallel processing module utilized all eight CPUs where, for each iteration, 600 simulations were divided into eight simultaneous runs of 75 each per CPU. This substantially improved the runtime of the calibration and validation process [
54].
2.9. Model Performance Indices
In addition to two indices used for prediction uncertainty analysis,
P-factor and
R-factor, multiple indices are made available to check the performance of the SWAT model [
59]. In this study, the Nash-Sutcliffe efficiency coefficient (
NSE), RMSE-observations standard deviation ratio (
RSR), percent bias (
PBIAS), and the coefficient of determination (
R2) were used to evaluate calibration and validation performance of the SWAT model. These are among some of the most widely used indices.
NSE indicates how well the observed versus simulated data plot fits within the 1:1 line [
59].
NSE ranges between −∞ and 1, with
NSE = 1 being the optimal value. RSR is the ratio of RMSE and the standard deviation of observed value, with a lower value being the better model simulation performance [
59].
PBIAS, with an optimal value of 0, evaluates the average tendency of the simulated data to be greater or lesser than their observed counterparts [
63]. The low values of
PBIAS imply accurate model simulation, positive values indicate model underestimation, and negative values indicate model overestimation bias [
59]. The proportion of the variance in measured data explained by the model is described by
R2 [
63]. The value of
R2 ranges from 0 to 1, with higher values indicating less error variance [
59,
64]. More details on the thresholds for evaluation of model performance can be found in Moriasi et al. [
59,
65] (see
Table A3).


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








