1. Introduction
For small maritime and coastal projects, if the wave measurements are insufficiently characterized, it is nowadays a standard design practice to develop the wave statistic through numerical predictions based on available long-term wind data.
Wave models can be categorized based on their typical applications, i.e., global/oceanic or coastal/regional (Lavidas et al. [
1], Umesh et al. [
2]). Well-known ocean scale models are WAve Model (WAM, [
3]) and WaveWatch 3 (WW3, Tolman, [
4]), regional scale wave models are, among others, Simulating WAves Nearshore (SWAN, Booij et al. [
5,
6]), STeady-state spectral WAVE (STWAVE, Smith [
7]), MIKE21-SW [
8] and CMS-Wave (Lin at al. [
9]). The models can be tuned through several settings and parameters. Actually, the experience on the best choice for settings and parameters is mainly site-specific and, in the absence of direct calibrations, the default values are suggested. A comprehensive discussion of the present state of the art in wave modelling and future developments is presented by Cavaleri et al. [
10].
For small scale investigations, several works confirmed that the results are only partially affected by the actual model used. Rusu et al. [
11] compared the predictions carried out with SWAN and STWAVE focusing on the performance of the two models in shallow and very shallow water, considering several target areas on the Portuguese coast. Fonseca et al. [
12] used these results to compare also the MIKE 21 BW predictions. The authors found that the models behave similarly; MIKE 21 SW and SWAN are more complex models with a larger set of formulations and choices, but STWAVE, despite its simplicity, produced good results in a faster computational time. Strauss and al. [
13] presented approximate results between SWAN and MIKE 21 SW for the Gold Coast in Australia; the SWAN model showed larger sensitivity to the wind input without results improvements. Ilia & O’Donnell [
14] compared the results performed with SWAN and MIKE 21 SW on an unstructured grid representing a harbour in the presence of three detached breakwaters. This study suggests the results of the models were consistent with observations during the storms and behaved similarly in most events. A sensitivity analysis demonstrates the wind effect was significant on the results due to the large fetch length in the harbour.
In practice, these papers demonstrated that the models simulate correctly the combined effect of wave propagation and wave generation mechanisms. For the specific case of enclosed basins, the wave generation is critical, since the wind-wave growth starts from land, the wave boundary condition being null. Nevertheless, although each model implements a different formulation for the wind input source term, and uses different relations for the drag coefficient, it is expected that the final result is similar. However, Moeini et al. [
15], who investigated only the wind-wave generation (without a wave spectrum as boundary condition), found some inconsistency between the results of the SWAN and MIKE21 due to differences between the wind input parameterizations. Furthermore, different formulations are available also within the same model. Christakos et al. [
16] and Aydoğan & Ayat [
17] compared the different source term packages available in SWAN. They all perform well for the most exposed locations, but for more sheltered locations, the packages show pronounced differences.
Given the above literature review, it is evident that several studies have been carried out to compare different spectral wave models, but there is not sufficient focus on specific applications on enclosed basins, such as lakes and closed lagoons. The novelty of this research is the focus on these conditions for which it is interesting to examine whether the model’s results are consistent.
In the present study, three freely accessible regional scale spectral wave models (SWAN, STWAVE, and CMS-Wave) are compared with reference to the wind-wave generation inside an enclosed basin. SWAN is widely applied by the scientific community for coastal and maritime studies (e.g., Bellotti et al. [
18]). STWAVE is simpler in terms of formulations and settings and was already used by the Authors (Martinelli et al. [
19], Favaretto et al. [
20]). Finally, CMS-Wave is similar to STWAVE but with an emphasis on wave-structure-land interactions for practical coastal engineering projects (e.g., Nassar et al. [
21]). Several studies discuss the validation of these three models with field data. For instance, Christakos et al. [
16] studied the performance of three white-capping and wind input source term packages available in SWAN comparing the results with in situ measurements in a fjord system, i.e., a narrow fetch geometry. Bryant and Jensen [
22] applied the STWAVE model to the North Atlantic coast modelling seven historical storm events (including hurricane Irene and Sandy). The STWAVE results were successfully compared against buoys measurements. The authors found a slightly smaller model performance within the Chesapeake Bay, a complex environment where waves are largely locally generated by winds. Lin et al. [
23] verified and validated the CMS-Wave model with several test cases, including analytical/empirical solutions, idealized applications, and studies with data from laboratory and field measurements in coastal inlets, coastal structures, bays, estuaries, etc. The behavior of the models in the case of enclosed basins is not specifically documented.
Although for many applications, the absence of reliable simultaneous wind and wave information prevents a direct assessment of the model’s performance, it is possible to point out the potential inaccuracy of the models based on their mutual comparison. In order to compare the performance of SWAN, STWAVE, and CMS-Wave, this study investigates an idealized case and a real application on the Garda Lake, in the North of Italy.
The objective of this study is to make the users more aware of the limits and peculiarities of these models applied to enclosed basins. Hence, the main default settings and parameters recommended by the model’s developers are used, which are those reasonably chosen by most engineers in the frequent case of absence of specific calibrations (such as for the Garda Lake where, although many structures have been built, no calibration has ever been done).
Section 2 briefly describes the main characteristics of the three chosen models and the wind input source terms. In
Section 3, an idealized case is presented to highlight the differences in wind-wave generation and growth.
Section 4 presents an application to the Garda Lake (Italy) and a comparison of the results carried out with the three wave spectral models. Finally, conclusions are drawn.
2. Numerical Models
SWAN, STWAVE, and CMS-Wave are spectral models based on the wave action balance equation. The models are available for free and can be run as a stand-alone executable. In the following brief descriptions of the models are presented; for a more detailed description of hypothesis and formulations, the readers can refer to the user and technical manuals.
The SWAN (Simulating WAves Nearshore) model is a third-generation wave model, developed by the Delft University of Technology (Booij et al. [
5,
6]). The model solves the wave action balance equation with sources and sinks and accounts for refraction, diffraction, shoaling, blocking and reflections by opposing currents, blocking, and reflection by or transmission through obstacles. The model can perform stationary and non-stationary simulations over structured or unstructured meshes. It solves the equations with a finite difference approach using an implicit iterative direct method for time integration (Sartini et al. [
24]). The sources and sinks included are generation by wind, dissipation by whitecapping, dissipation by wave-breaking induced by depth, dissipation by bottom friction, wave-wave interactions in both deep and shallow water.
The STWAVE (STeady-state spectral WAVE) was developed by the U.S. Army Corps of Engineers Waterways Experiment Station (USACE-WES). STWAVE is a steady-state, finite difference, phase-averaged, spectral model based on the wave action balance equation, that can simulate nearshore wave propagation and transformation, including refraction, shoaling, breaking, and wind-wave generation (Smith, [
7]).
The model has two modes of operation: half-plane and full-plane. Half-plane mode allows wave energy to propagate only from the offshore towards the nearshore. Hence, waves travelling in the negative x-direction, possibly due to reflection or winds, are neglected in half-plane simulations. The full-plane mode, instead, allows wave transformation and generation on the full 360-deg plane. The half-plane version requires considerably lower memory requirements, executes faster, and is generally appropriate for most nearshore coastal applications except for semi-enclosed bays and lakes where there is no obvious offshore direction. In these latter cases, the full-plane version is preferable.
CMS-Wave is a spectral wave transformation model (Lin et al. [
9]) developed by the Coastal Inlets Research Program (CIRP), a research and development program of the U.S. Army Corps of Engineers (USACE). The model solves the wave-action balance equation using a forward marching finite difference method. CMS-Wave includes physical processes such as wave shoaling, refraction, diffraction, reflection, wave-current interaction, wave breaking, wind-wave generation, white capping of waves. One of the peculiarities of the CMS-Wave model is that it takes into account the influence of coastal structures in terms of diffraction, reflection, transmission, run-up, and setup. As for the STWAVE model, the CMS-Wave can be run both in Half and Full mode.
SWAN is a more flexible model that allows setting many parameters of the formulations for the source terms. STWAVE and CMS-Wave only allow to choose if including or not some phenomena. Both SWAN and CMS-Wave can perform stationary and non-stationary simulations, conversely, STWAVE runs only stationary simulations.
The STWAVE and the CMS-Wave models take advantage of the SMS interface (Zundel [
25]) for grid generation, model setup and input, plotting, and post-processing of modelling results. To perform the simulations, the SMS 12.2.7 (for STWAVE and CMS-Wave) and the SWAN 41.31 are used.
2.1. Wind Input Source Terms
In the SWAN model, four options are available for third-generation mode for wind input, quadruplet interactions, and whitecapping: KOMEN, JANSSEN, WESTH, and ST6. They are described in detail in Christakos et al. [
16] and Aydoğan & Ayat [
17].
In the KOMEN and JANSEN packages, the transfer of wind energy to the waves is described by a resonance mechanism and a feedback mechanism, that have respectively linear and exponential effects (Equation (1)). If the linear growth (
A) is activated, the expression proposed by Cavaleri & Malanotte-Rizzoli [
26] is used (Equation (2)).
In which θw is the wind direction, H is the filter and σ*PM is the peak frequency of the fully developed sea state (σ*PM = 2π0.13g/28 u*).
The exponential effect of the wind input term in the KOMEN package is estimated according to Komen et al. [
27]. The expression is a function of
u*/
cph, where
cph is the phase speed.
where
ρa and
ρw are the density of air and water,
θ and
θw the wave and wind direction.
In the JANSEN package, the exponential growth is described by the expression proposed by Janssen [
28]. The WESTH package includes a non-linear saturation-based whitecapping combined with wind input of Yan [
29], which combines the expressions by Komen et al. [
27] and Plant [
30].
Finally, the novel ST6 package uses the wind input and the whitecapping formulation from Rogers et al. [
31]. This package is an observation-based scheme that contains wave-turbulence interaction, positive and negative wind input, and two-phase whitecapping dissipation. The wind input is described by:
where
Bn is the spectral saturation.
Christakos et al. [
16] found the best agreement with measurements for the KOMEN package for sheltered areas, and WESTH and ST6 for more exposed ones. Aydoğan & Ayat [
17] found that ST6 physics presented the best model performance at predicting the wave heights for locations along the Black Sea coastline, which is an enclosed basin, but very large. The ST6 package requires specific calibration, including a coefficient that accounts for the effect of gustiness in the growth rate (raised from 28 to 32).
The wind velocity used by SWAN is the wind velocity at a 10 m elevation (
U10), then converted in the calculations into the friction velocity
u*, defined as
u*
2 =
CD U102, where
CD is the wind-drag coefficient. In the following simulations, the default KOMEN package is used with the Wu [
32] default formulation (Equation (5)) for the drag coefficient
CD. The 2nd order polynomial formula proposed by Zijlema et al. [
33] (Equation (6)) and the Hwang [
34] formulation (Equation (7)), default for the ST6 packages) are also tested for comparison, being choices typically used by designers.
The flux of energy due to the wind source is implemented into STWAVE by the equation proposed by Resio [
35]:
The friction velocity u*, defined as before u*2 = CD U102, is computed through the drag coefficient CD = 0.0012 + 0.000025 U10. Cm is the mean wave celerity, ρa and ρw are the density of air and water, and λ is a partitioning coefficient that represents the percentage of total atmosphere to water momentum transfer that goes directly to the wave field (usually λ = 0.75).
The wind-input source in the CMS-Wave model is formulated as a function of the ratio of wave celerity
C to wind speed
W, the ratio of wave group velocity
Cg to wind speed, the difference of wind speed and wave celerity, and the difference between wind direction
θwind and wave direction
θ (Lin & Lin [
36]):
where
N is the wave action density (=
E(
θ,
σ)/
σ),
E*PM is the functional form of the Pierson-Moskowitz spectrum,
σ =
g/W is the Phillips constant, and Φ(
θ) is a normalized directional spreading. The function
F1 describes the wind stress effect,
F2 designates Phillips’ mechanisms (Phillips [
37]), and
F3 accounts for the wave age effect.
2.2. Models Parameters and Settings
In the following simulations, the SWAN model is run with the third generation option (GEN3) in stationary mode. Default numerical properties are used with NUMerics STOPC command (
dabs = 0.005,
drel = 0.01,
curvat = 0.005,
npnts = 99.5) with limiter parameter equal to 0.1. This command influences the convergence criterion for terminating the iterative procedure in the computations [
38]. The threshold depth
depmin is set equal to 0.05 m, as default, indicating that any positive depth smaller than
depmin is made equal to this value.
For the depth-induced wave breaking, the default Battjes and Janssen [
39] formulation is used (BREA command) with
alpha = 1 and
gamma = 0.73. The bottom friction is activated with the FRIC MAD command that considers the eddy-viscosity model of Madsen et al. [
40]. The equivalent roughness length scale of the bottom
kn is set as default (0.05 m), and following the Bretschneider et al. [
41] relationship, it corresponds to a Manning coefficient of 0.04 s/m
1/3 in shallow water.
To consider the Zijlema et al. [
33] formulation, the DRAG FIT command is used. To activate the ST6 package the GEN3 ST6 command is employed. Since there is no default ST6 parameter set available, one of the example parameter sets given in [
42] was used. The selected ST6 parametrization considers
a1sds,
a2sds,
p1sds,
p2sds, and
wscaling parameters equal to 2.8 × 10
−6, 3.5 × 10
−5, 4, 4, and 32 respectively. Aydoğan & Ayat [
17] found that this latter parameter is the most significant in the ST6 package at adjusting wave heights. The ST6 package requires also the setting of the type of swell dissipation and, as suggested by the example, the non-breaking dissipation of Ardhuin et al. [
43] is used with
cdsv = 1.2.
For the STWAVE and the CMS-Wave models, the lists of available adjustable parameters are shorter than the SWAN one. In the STWAVE model the depth type is set as nontransient and the boundary interpolation as morphic. Current interaction is not considered, the bottom friction is spatially constant, and the Manning coefficient is n = 0.04 s/m1/3. Default iteration control options are used: maximum number of initial and final iterations = 20; initial and final iterations stop values = 0.1; initial iterations stop percent = 100 and final iterations stop percent = 99.8.
In the CMS-Wave model, the bottom friction is set constant with
n = 0.04 s/m
1/3, and the “wetting and drying” option is allowed. The infragravity wave effect and the non-linear wave effect are activated, and the diffraction intensity is set equal to 4 as default. The wave breaking formulation employed is the “extended Goda” option (Sakai et al. [
44]).
3. Comparison Based on an Idealized Basin Test
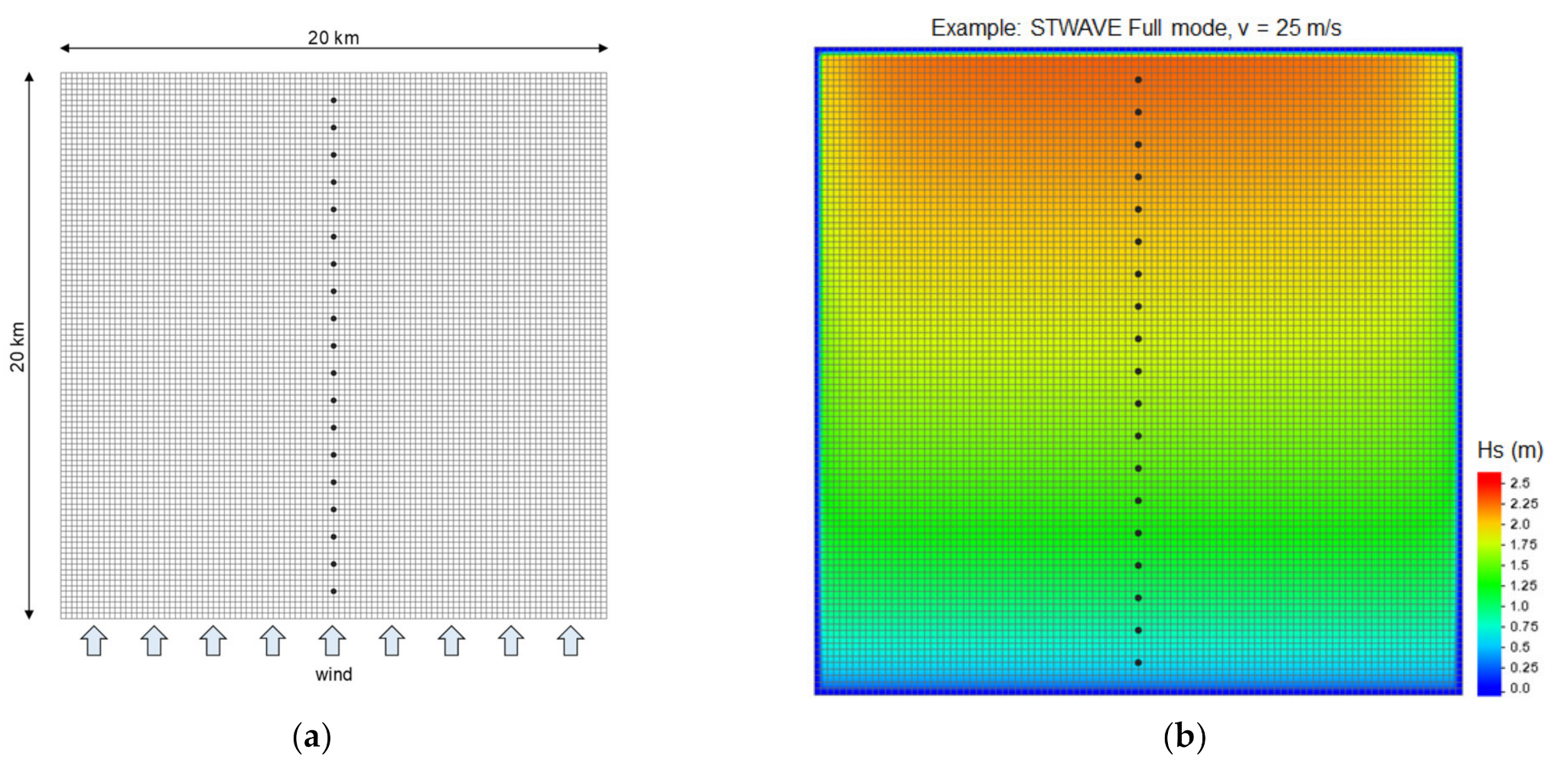
The purpose of this section is to compare the wave generation and wave growth prediction of the three models in an idealized basin, minimizing the effects of diffraction, refraction, shoaling, and reflection. The model domain is a square basin (20 km × 20 km) consisting of 100 × 100 cells with constant size (200 m × 200 m). A preliminary investigation showed that no significant changes are observed for a grid size of 100 m, 200 m, and 400 m, and we concluded that 200 m was the best compromise between speed and accuracy. The bottom is flat and constant, and the simulations were performed two times, in the first considering a water depth d = 20 m and in the second d = 100 m. Bed friction is not taken into account. The test cases include 14 constant winds, ranging from 5 m/s to 50 m/s with wind direction along one of the two axes of the grid. The wave energy input at the upwind boundary is set to zero.
The spectral grid used in the three models ranges from 0.12 to 1 Hz, but different numbers of frequency bins are set. In fact, this is a crucial and critical issue for the numerical models since it should be a compromise between accuracy and computational load. The frequency range must cover the range of expected wave frequencies generated by the winds, and can be approximately found using well known analytical formulations (e.g., [
45,
46]) based on intensity, fetch, duration and depth. The setting of an unsuited frequency range and discretization lead to noteworthy results (with differences of the order of 50–60% for the wave height). For the SWAN model, the number of bins is 60, and the model chooses the intervals as logarithmically distributed. For the STWAVE model, the number of bins is 111 and regularly distributed with a 0.008 Hz increment. Finally, for the CMS-Wave model, the number of bins is 74 with a 0.012 Hz increment. The other settings and parameters for all the models are set to the default choices and values. The directional distribution of the energy is discretized with a 5° interval.
The results are evaluated at the centre line of the basin, where the boundary effects are negligible, every 1 km of fetch.
Figure 1 shows the model domain, the output locations, and an example of results carried out with the STWAVE model in Full mode, for a wind intensity equal to 25 m/s. In the Northern boundary, the wave height is zero since the condition is a non-reflective beach, that, however, does not affect the result in the domain.
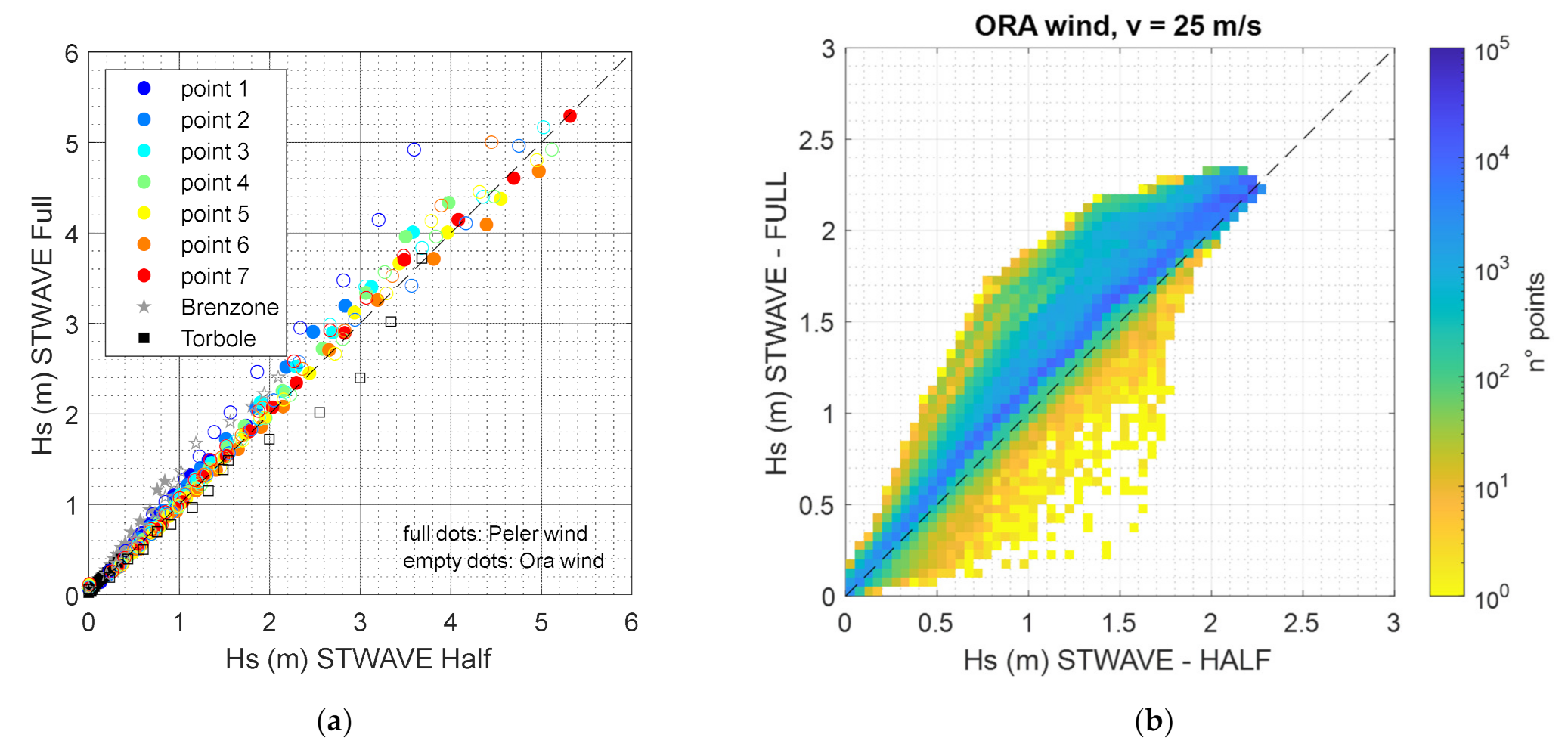
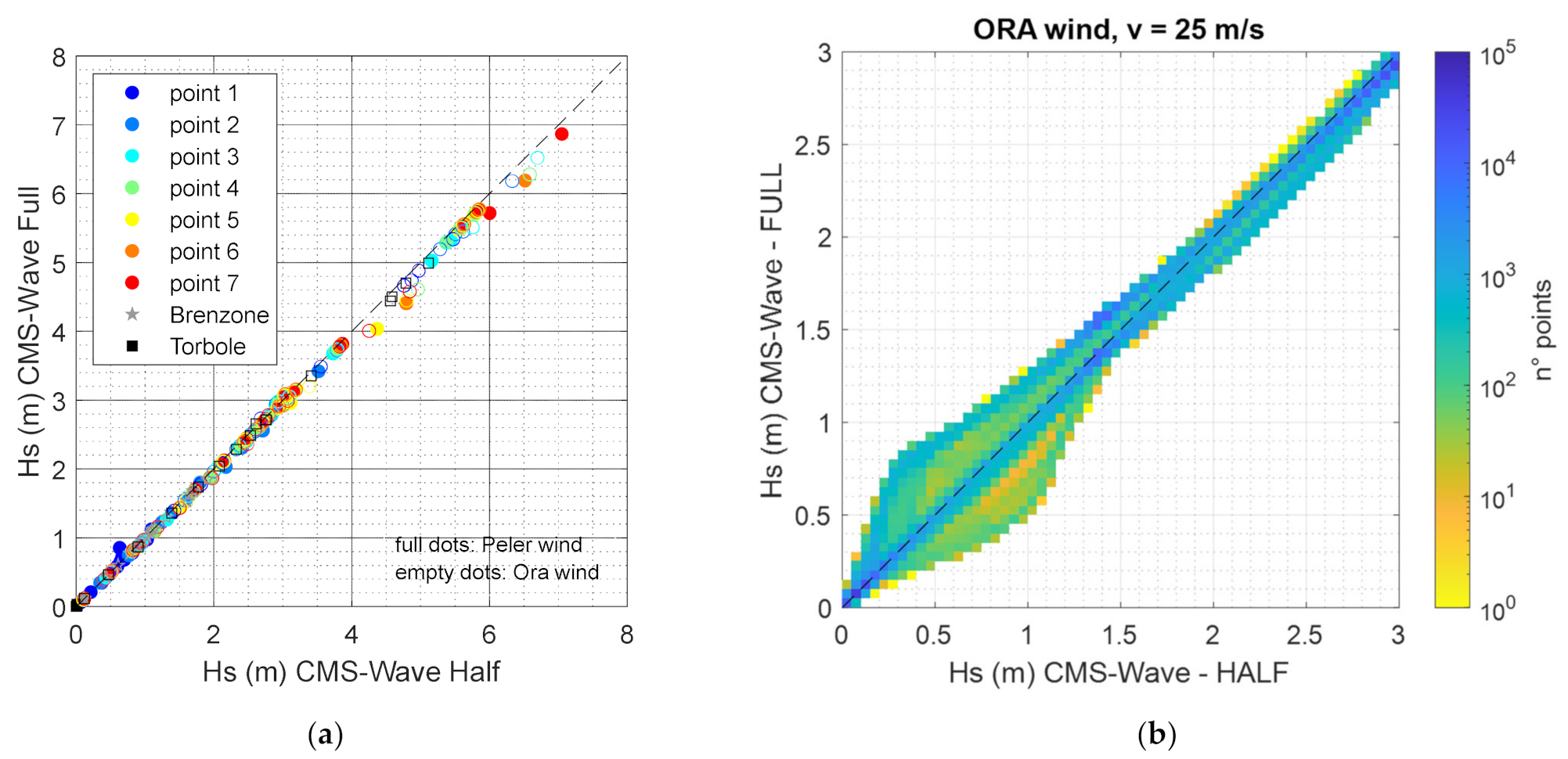
The STWAVE model and the CMS-Wave model are run in both Half and Full mode. For this particular idealized basin, where the main geometrical wave transformation phenomena are negligible due to the basin configuration, the results in the centre line performed in Half and Full mode for both models are comparable (with differences of the order of ±2–7% both for Hs and Tp). In the following, some results are presented only for the Full mode setting.
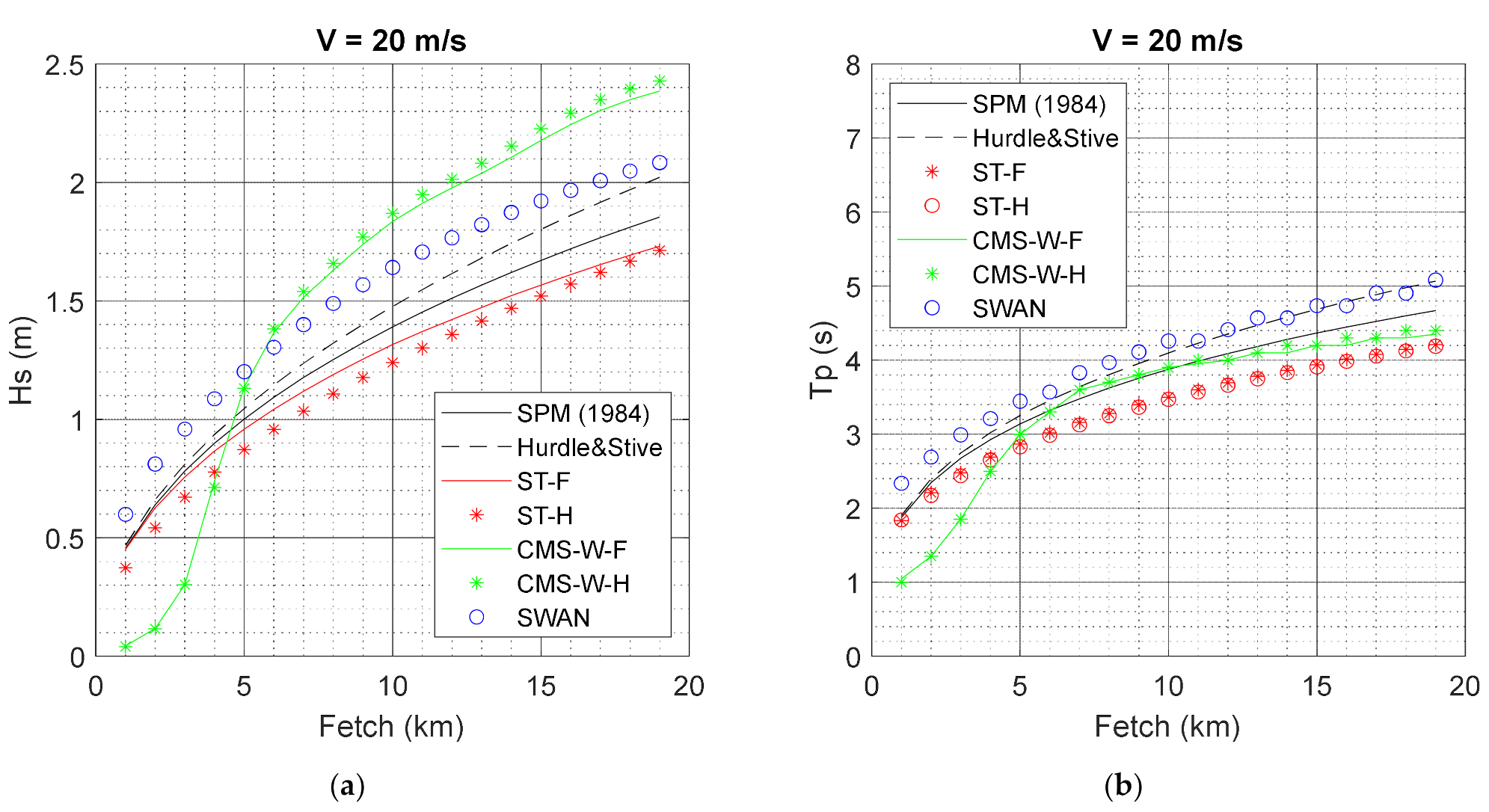
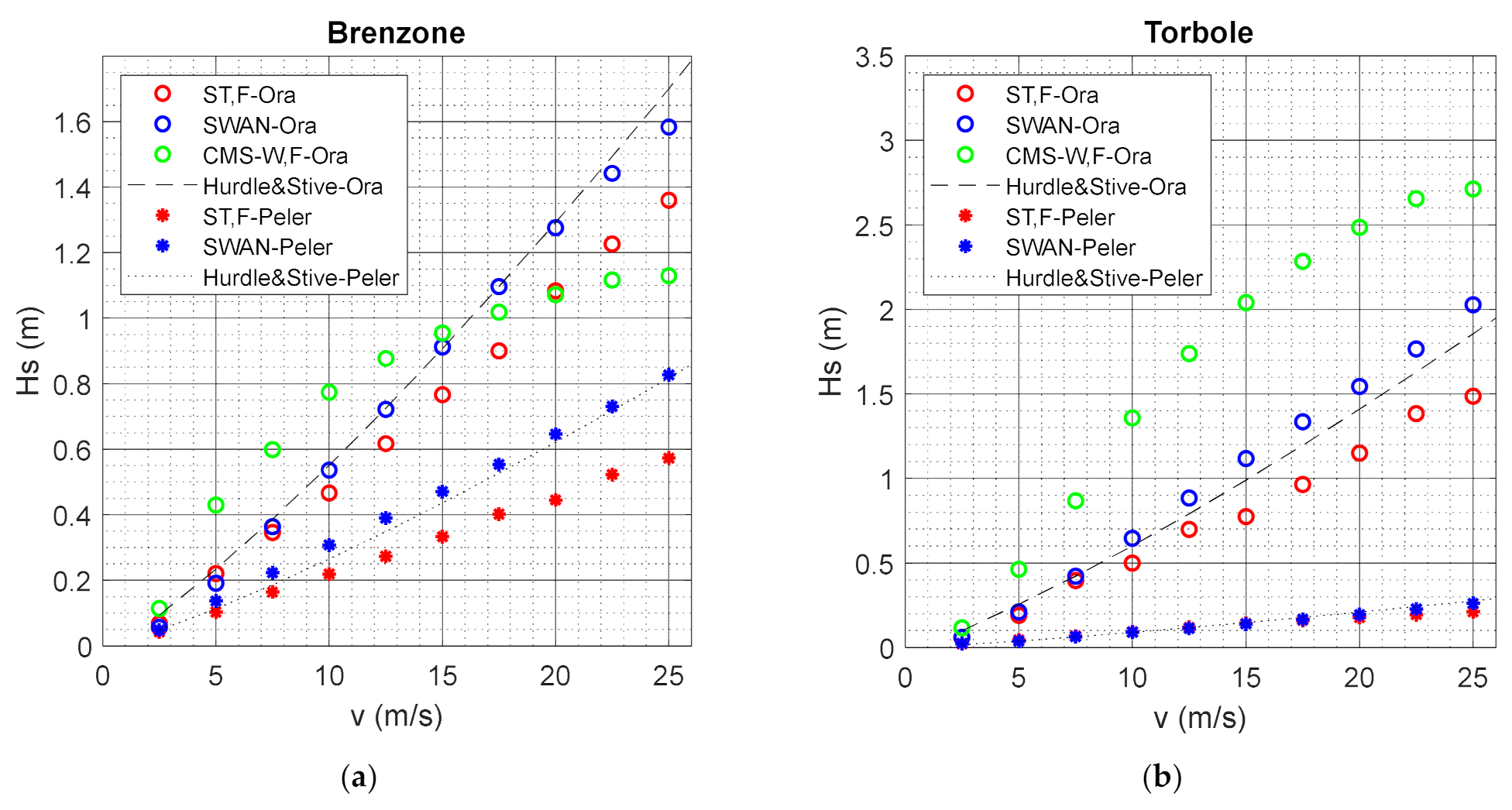
This test case is also suited to be compared with the wave growth curves proposed by Hurdle and Stive [
45], which are a modification of the ones given in the Shore Protection Manual (SPM, 1984 [
46]).
Figure 2 shows the comparison among the results for the idealized test case with wind intensity equal to 20 m/s in terms of wave heights and wave periods as a function of the fetch. The figures show both the analytical results carried out with the SPM (1984, [
46]) formula and the Hurdle and Stive formula and the numerical results performed with STWAVE (Half and Full mode), CMS-Wave (Half and Full mode), and SWAN. As aforementioned, the differences between the Half and Full mode for STWAVE and CMS-Wave are small (green/red lines and star markers are similar between them). The three models behave differently, and this is interpreted as a consequence of the different formulations of the wind input and wave growth implemented in the codes. The figures are essentially a proxy for the mechanism that transfers energy from the wind with constant velocity to the waves. The figures also show that CMS-Wave has some issues in the modelling of the waves for fetches smaller than 5 km.
Nekouee et al. [
47] carried out a similar idealized investigation through an extensive set of SWAN simulations for different lake geometries and wind conditions, using different computational grid sizes to study the wave regime in order to compare numerical and empirical wave prediction methods. The authors find, with reference to the SWAN model, similar differences between the prediction and the analytical solution. Specifically, they found that CEM (Coastal Engineering Manual, [
48]) analytical method shows more coincidence with the SWAN numerical wave prediction results in shallow lakes while SPM [
46] and Krylov methods ([
49]) agree better with SWAN results in deep water.
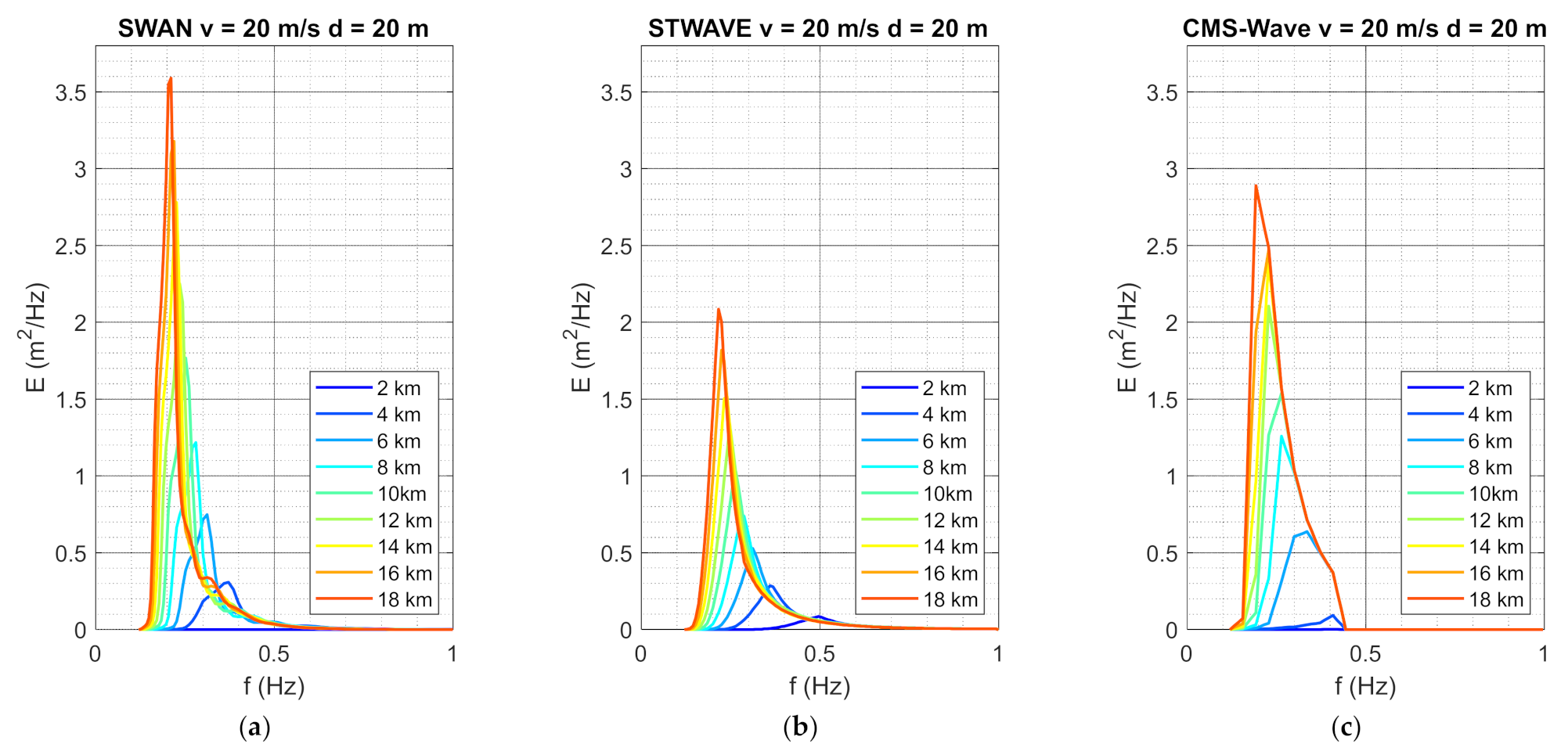
Figure 3 shows the evolution of the wave spectra in the three models. The SWAN spectra reflect the input source exponential shape and the non-linear wave interaction with energy transfer from higher to lower frequencies. The complicated input function (Equations (1)–(3)) for SWAN is reflected into a slightly more irregular shape of the spectrum compared to STWAVE, which shows a similar non-linear interaction behavior although with lower magnitudes. CMS-Wave suffers from a lower frequency resolution (which cannot be increased) and limited input energy at frequencies larger than 0.45 Hz (recall that the chosen frequency range is 0.12–1 Hz divided into 74 equally spaced bins). This explains why, for small fetches, the wave is not well generated.
To assess the comparison of the estimates with the results gathered with the analytical formula, three performance metrics are calculated: the coefficient of efficiency
NSE Nash et al. [
50], the index of agreement
D Willmott et al. [
51] and the square of the determination coefficient
r2. Complete disagreement is described by
D = 0,
r2 = 0 and negative
NSE. All indexed are = 1 for perfect agreement.
Table 1 summarizes the performance indexes between the models’ results and the analytical results based on the formula proposed by Hurdle and Stive. SWAN and STWAVE (Full mode) are in good agreement with the analytical predictions. The performance of the CMS-Wave model seems less good.
As aforementioned, the CMS-Wave results for very small fetches are not consistent with the analytical results. A similar test case was performed by Lin et al. [
52] for the CMS-Wave model, with a thinner basin (2 km × 20 km), water depth of 20 m, and three wind velocities (10, 20, 30 m/s) blowing parallel to the longer axis. Their results show some differences of the order of 10% in the comparison with the SPM (1984) curves for fetch larger than 5 km. They considered this behavior reliable for wave generation and growth for coastal applications but suggested further verification with field measurements. In the present study, we concluded that CMS-Wave can be applied for wave generation and growth in the coastal and estuary area with fetches greater than 5 km.
The observed differences among the models reasonably depend on the different numerical schemes adopted and the different sources of wind inputs implemented. In fact, as seen in
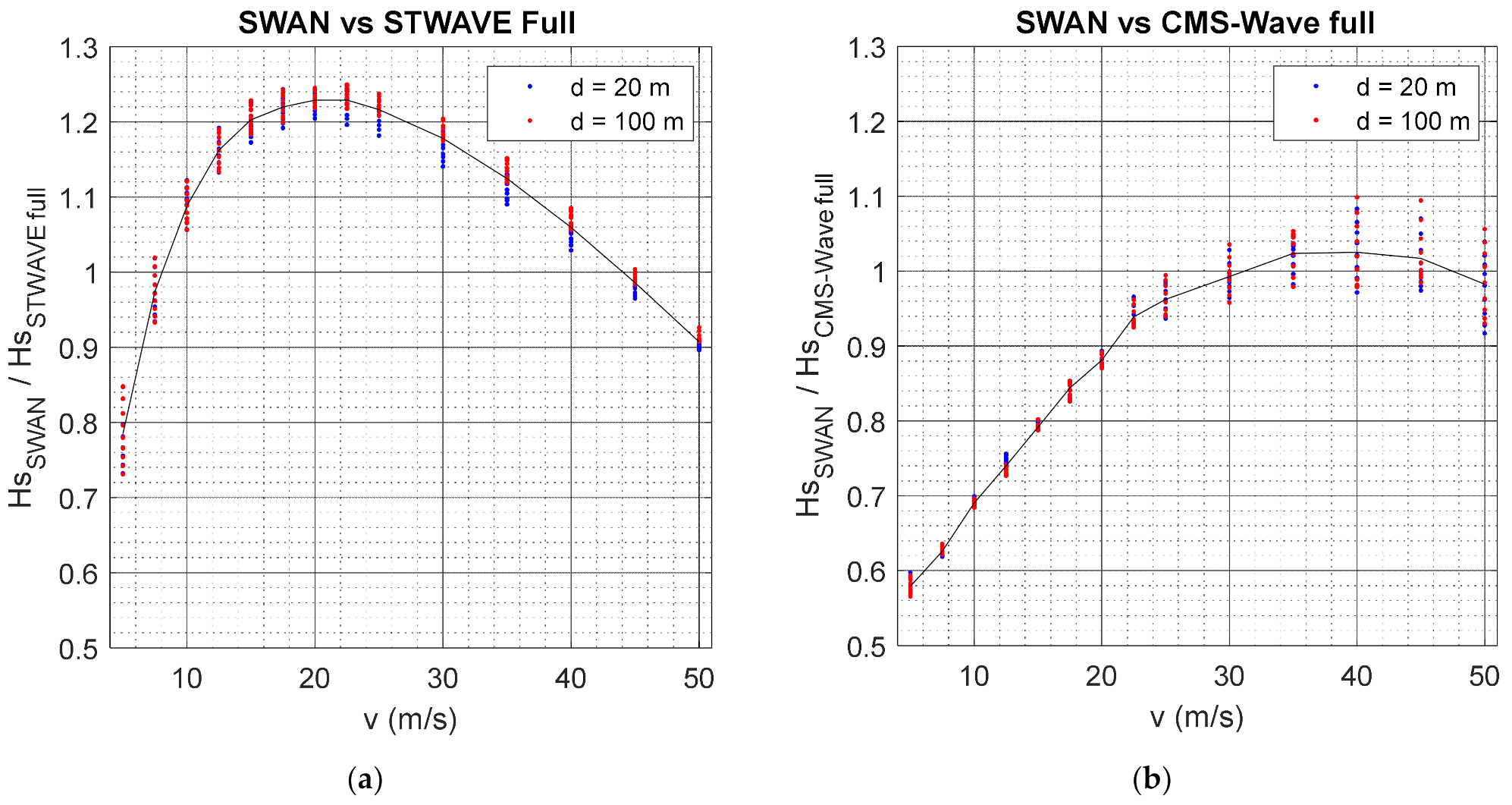
Section 2.1, the formulations that described the wave growth by wind are dissimilar and consider different drag coefficients, not easy to harmonize, and for which a direct comparison is therefore not practical. To better investigate these differences from a global perspective,
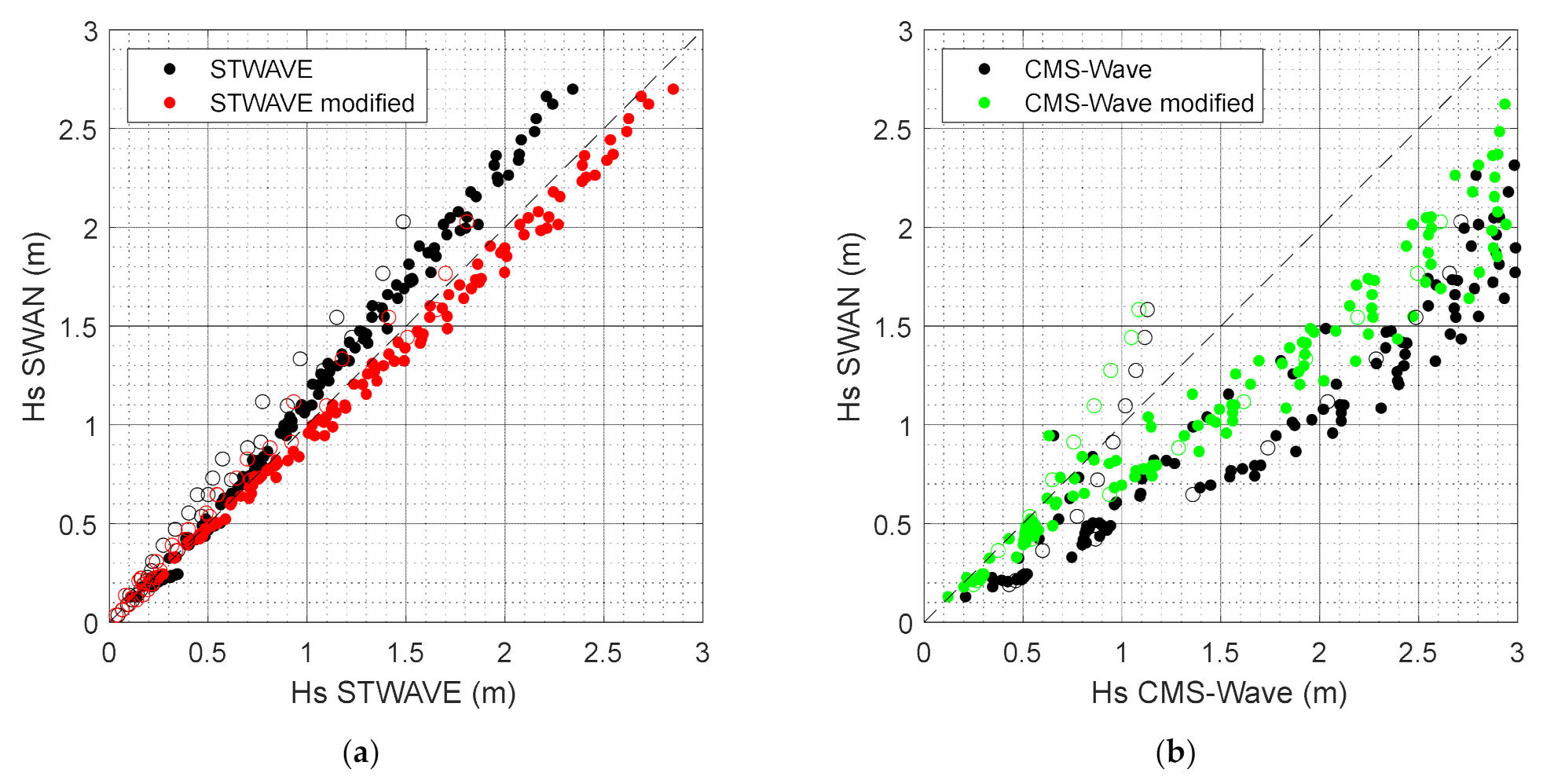
Figure 4 shows the ratio between the value of
Hs computed with SWAN and the
Hs computed with the other models for the same wind. The geometry of the idealized case is designed to minimize the effects of the boundary conditions and therefore the differences in the results can be ascribed only to the specific wind formulations and implementations of the models.
The different points, vertically aligned and with the same colour in the figure, are relative to the different fetch varying from 1 km to 19 km (output locations shown in
Figure 1a). SWAN predicts waves higher (up to 25% higher) than STWAVE in the frequently investigated range of winds from 10 m/s to 40 m/s. Conversely, SWAN predicts waves smaller than CMS-Wave for winds lower than 30 m/s, and for higher winds the results carried out with the two models are comparable (differences of the order of 5%).
Accordingly to the differences among the predictions of the wave heights, also the wave periods are different. SWAN forecasts wave periods up to 20% larger than the other models for winds between 15–35 m/s.
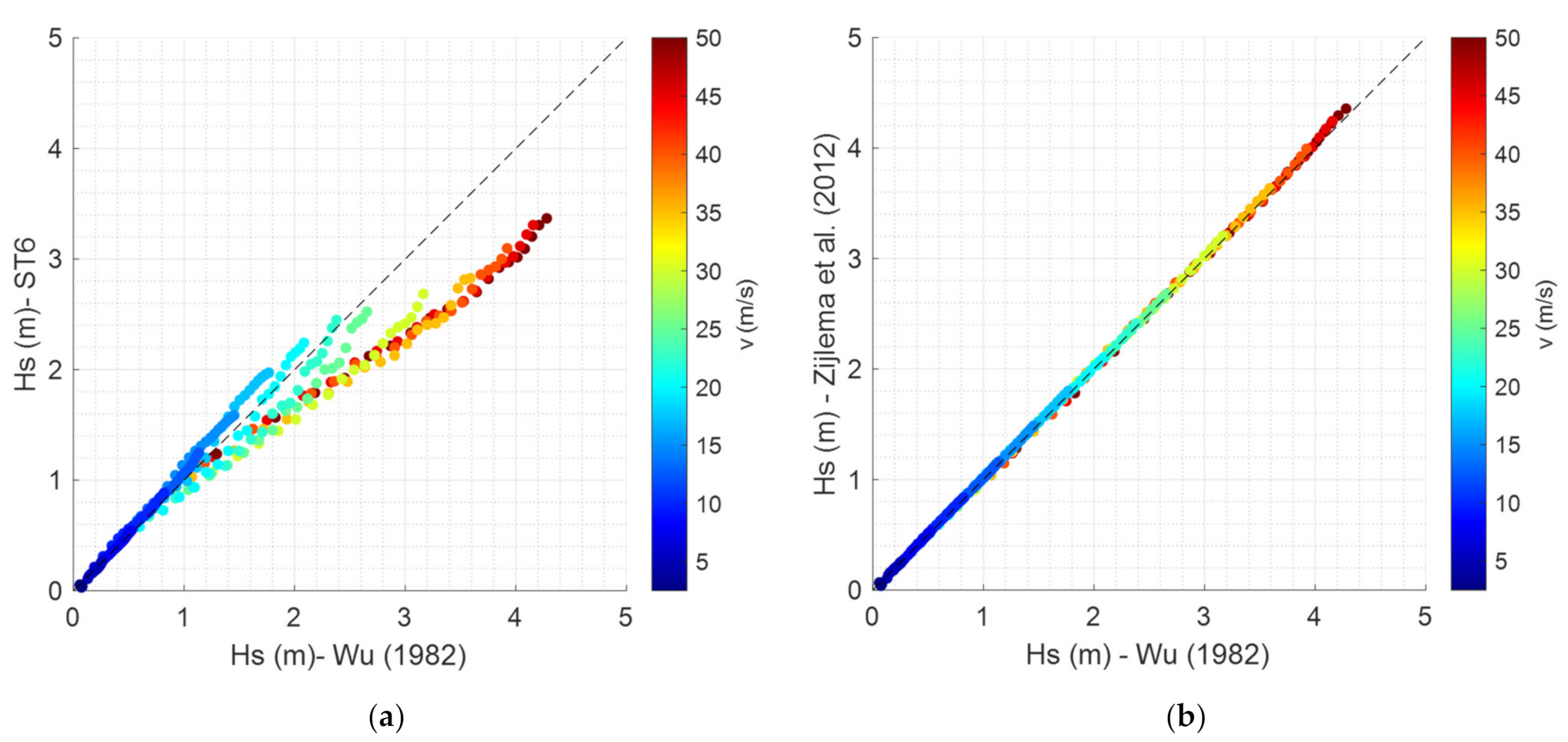
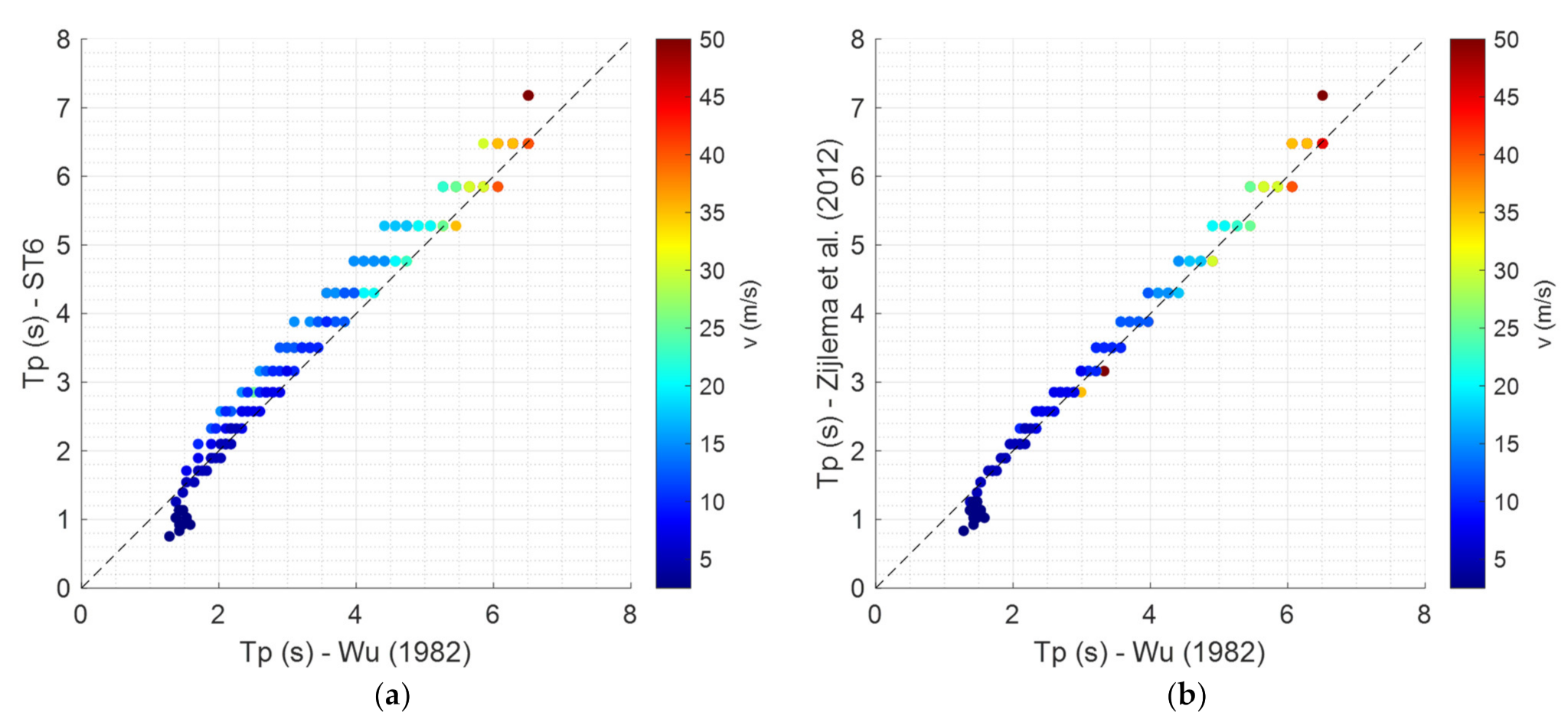
Figure 5 and
Figure 6 show a comparison in terms of
Hs and
Tp evaluated at the centerline of the idealized case using different formulations of the wind drag available within SWAN. In fact, recent developments have suggested switching from the original formulation by Wu [
32] to the formulation proposed by Zijlema et al. [
33] or to the one proposed within the ST6 Package (Hwang [
34]). As expected, since the tested wind velocities are not extreme, the two alternatives of the KOMEN package are very similar, whereas the ST6 package (using the settings recommended in regular SWAN simulations, with wind scaling equal to 32) shows lower values (25% lower) of wave height for more intense winds.
5. Conclusions
The paper presents a comparison among three spectral wave models for wind-wave generation and propagation inside enclosed basins. The three chosen models are SWAN, STWAVE, and CMS-Wave, which are freely available and solve the spectral action balance equation. The three models are nowadays commonly used to develop wave statistics for the design of important coastal structures. In real applications, specific calibration is frequently not carried out, due to lack of sufficient wave information, and therefore also in this study the main default settings and parameters, that are those reasonably chosen by most designers, are used.
It was found that, for enclosed basins, the difference among the results obtained by uncalibrated models is larger than expected and not acceptable, in contrast to published results that are relative to open sea applications.
The comparisons were initially performed on an idealized case to focus on the effect of the differences among the wind input parameterizations. The differences in the investigated range of winds (10 m/s to 40 m/s) are significant. CMS-Wave gave inconsistent results especially for small fetches, due to an inherent threshold in the highest simulated frequency. SWAN predicted waves higher (up to 25% higher) than STWAVE. For SWAN, the ST6 Package was compared to the KOMEN one, and, as expected by the analysis of Christakos et al. [
16], lower values of Hs were predicted.
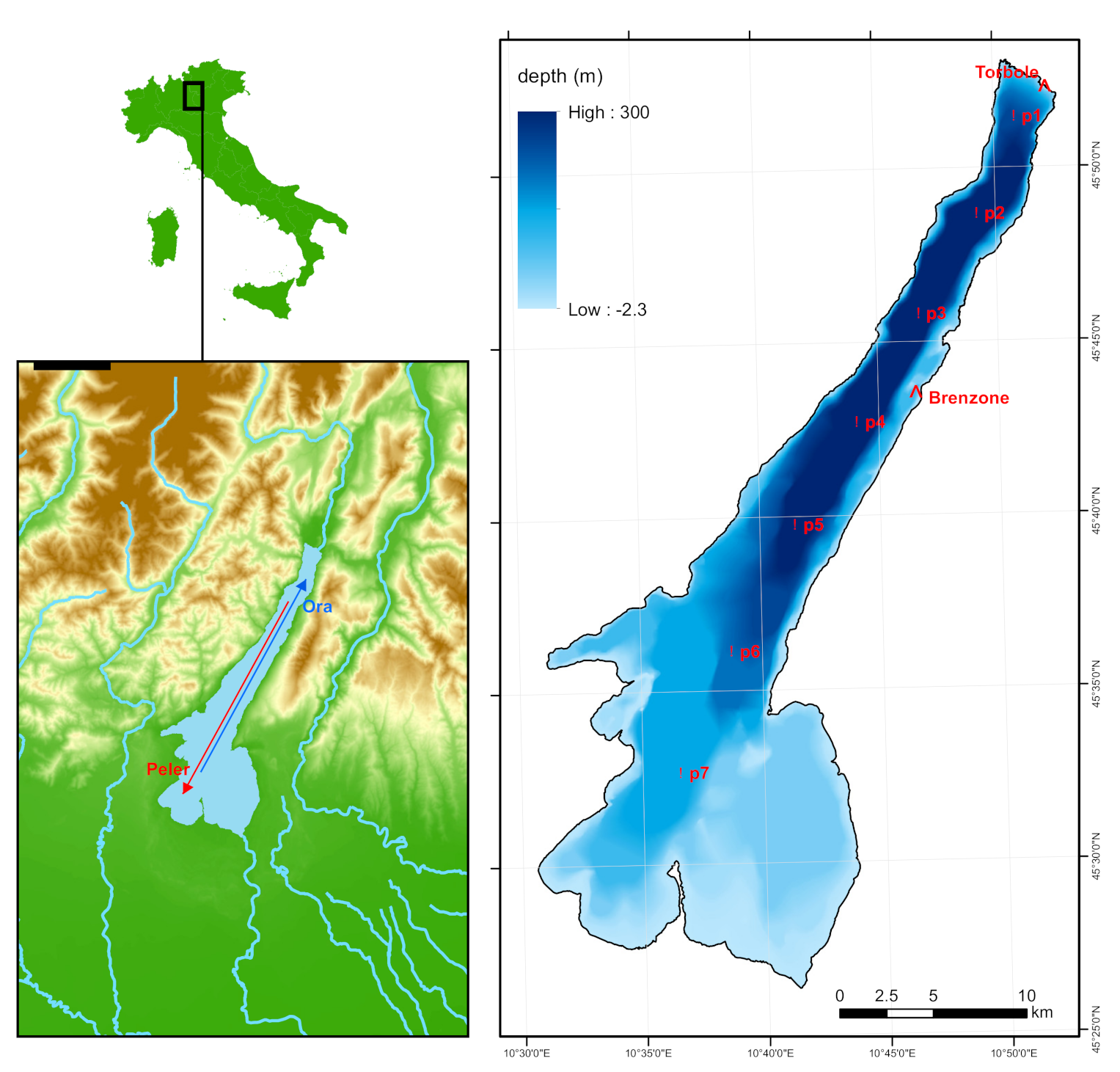
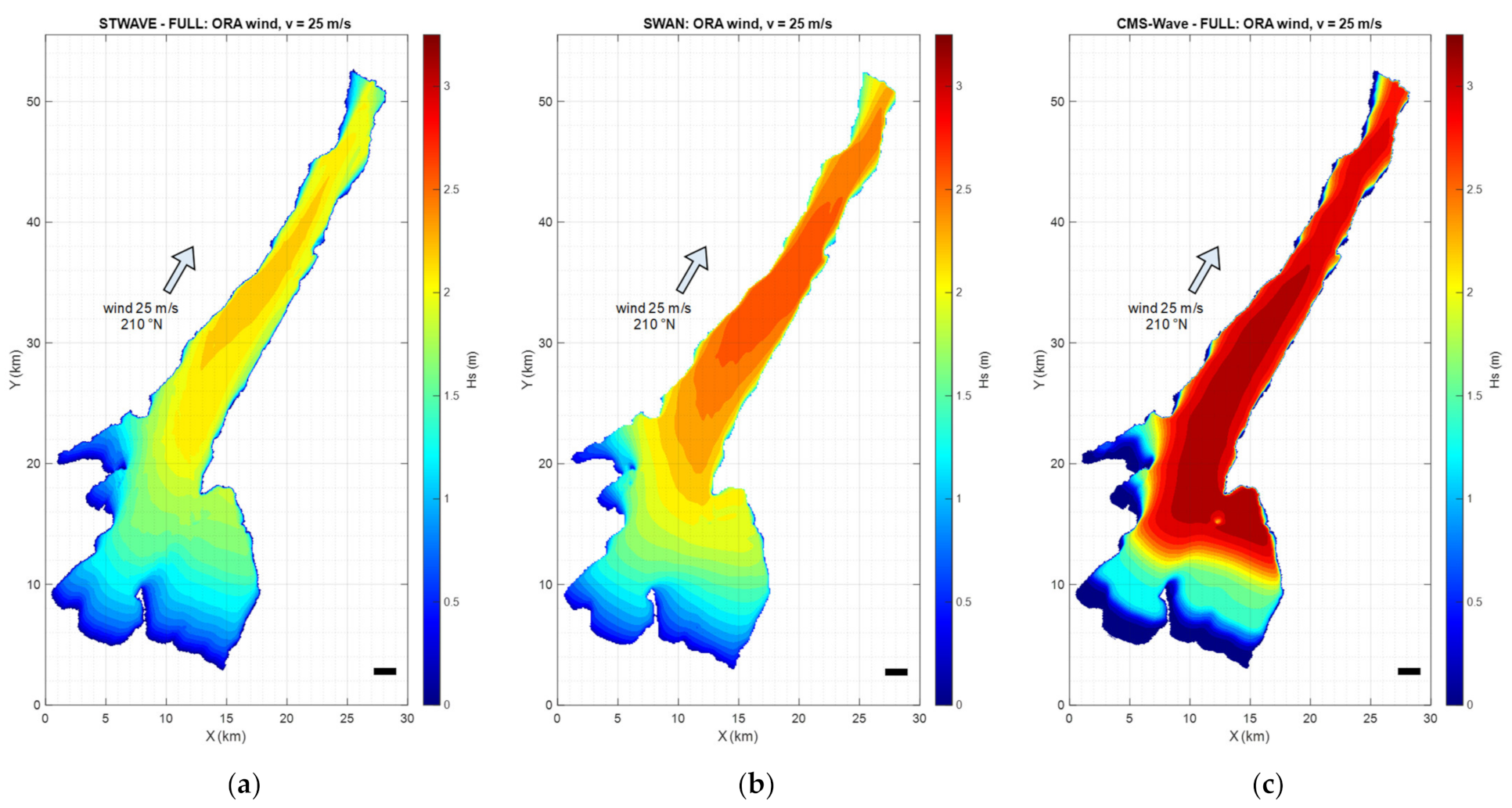
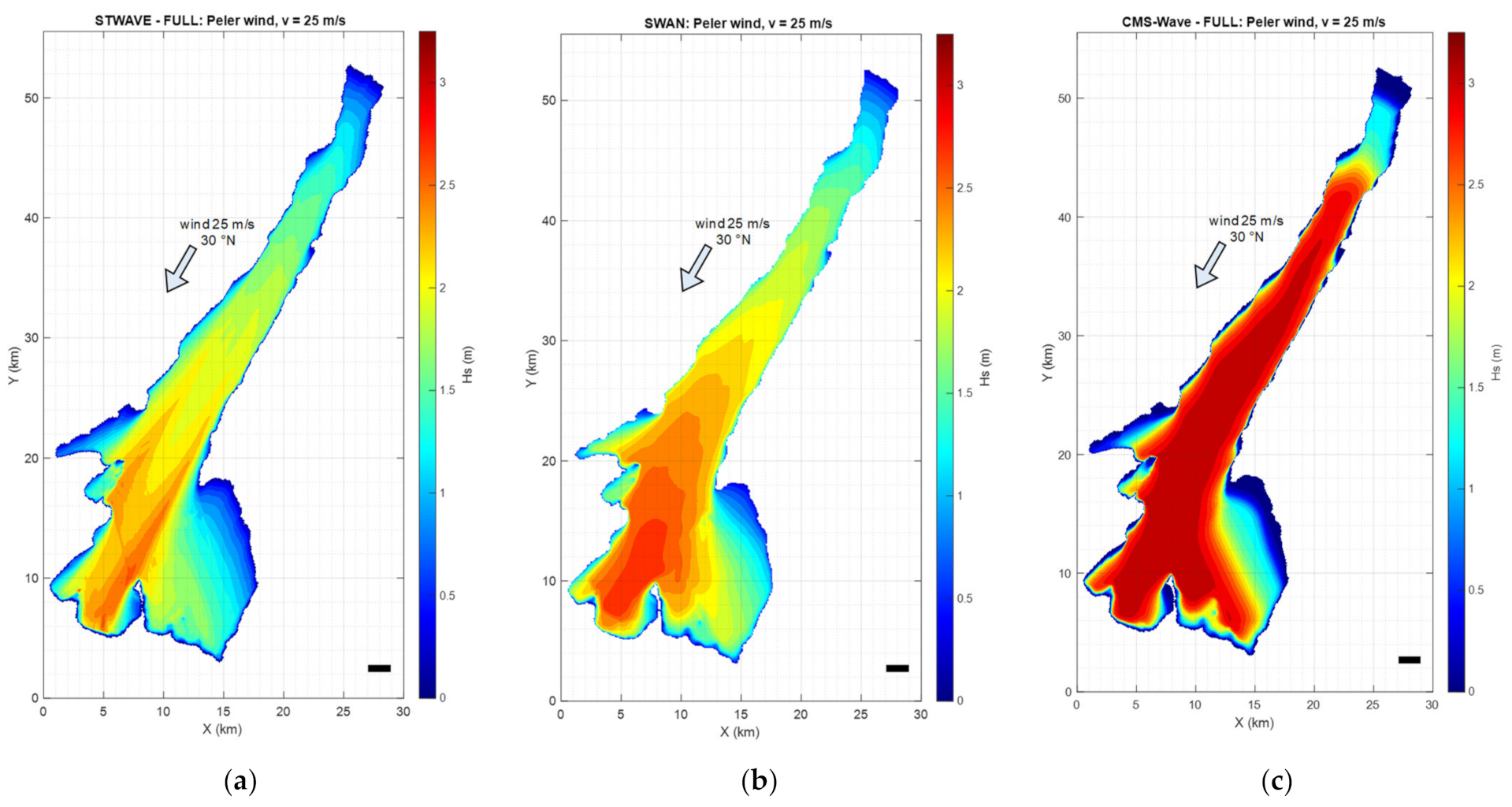
An additional application on the Garda Lake (Italy) was carried out. This enclosed basin was selected as an example of a case where calibration is not possible due to the absence of combined information on wind and waves. The models were applied to two locations on the lake, where a recent project is underway, and differences in the wave height > 20% were found, which are considered too large to be acceptable for design purposes. This study shows that a wave measurement campaign is necessary for this lake and in general for other similar enclosed basins.
The Full and Half plane modes in STWAVE and CMS-Wave were compared. For an enclosed basin such as the Garda Lake, the Full mode should be preferred since the lateral boundaries are not fully adsorbing. Although the wave heights computed in 7 points along the centre line of the Garda Lake are similar, the benefits of the Full mode are evident close to the shore.
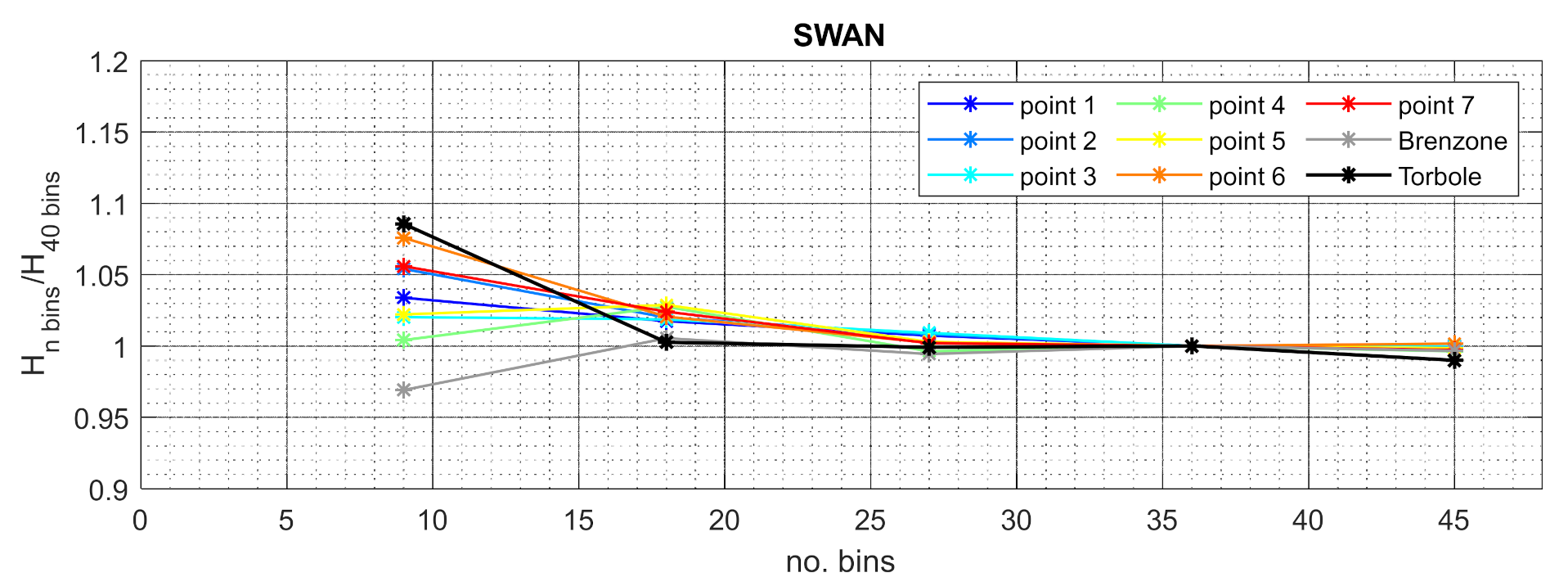
A critical issue of these spectral models was found to be the selection of the frequency discretization, which requires a careful pre-analysis. This issue is emphasized when iterative calculations for different wind velocities are carried out since the frequency range is kept constant by the models but the ideal range may be rather different. A possible workaround is to set a considerably wide frequency range even if very time consuming.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}