
A Study on the Determination Methods of Monitoring Point for Inundation Damage in Urban Area Using UAV and Hydrological Modeling



Abstract
:1. Introduction
1.1. Relative Work
1.2. Reseach Objective
- (1)
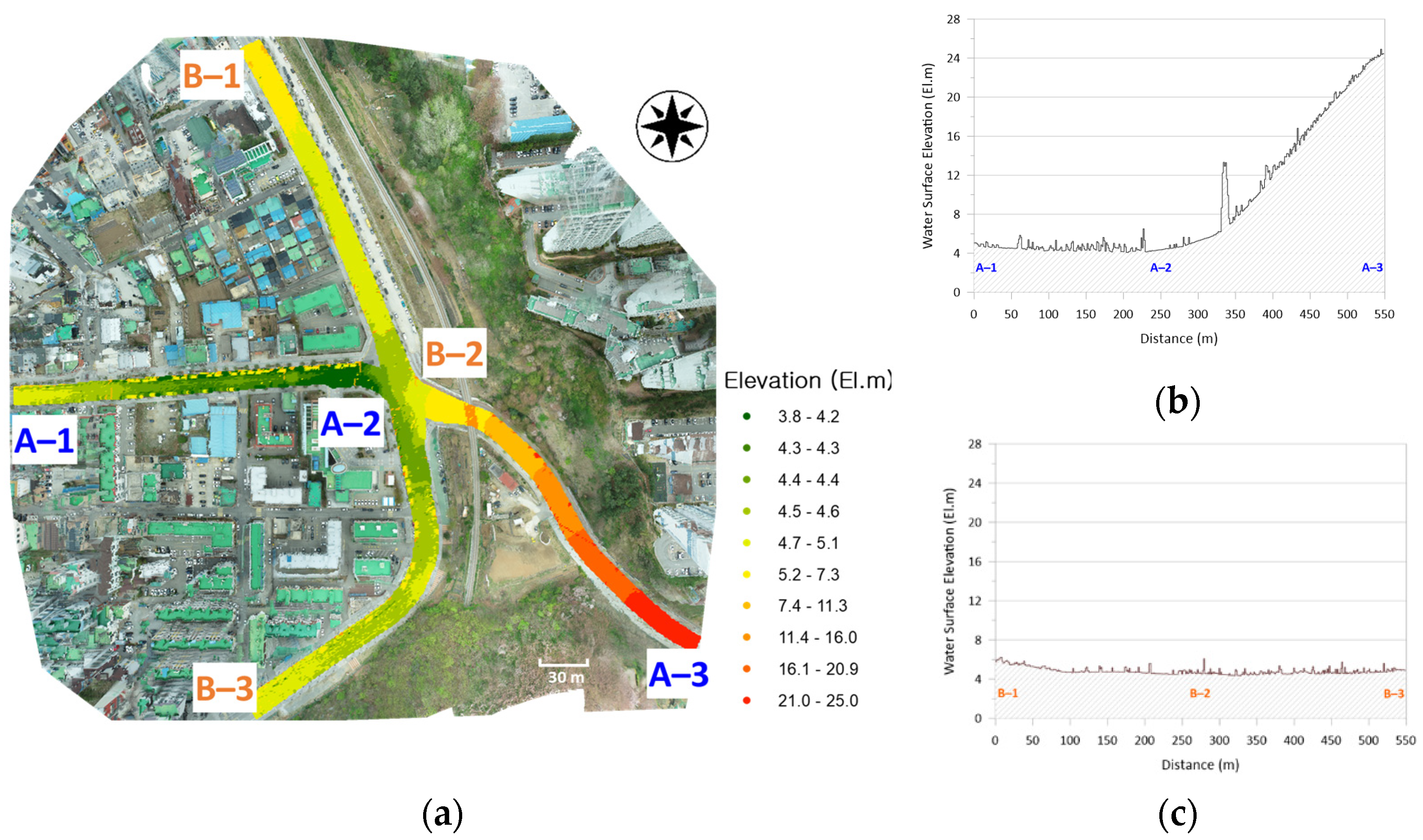
- High-precision topographic data for an urban were constructed using a UAV, and the flow of rainwater in watersheds was analyzed.
- (2)
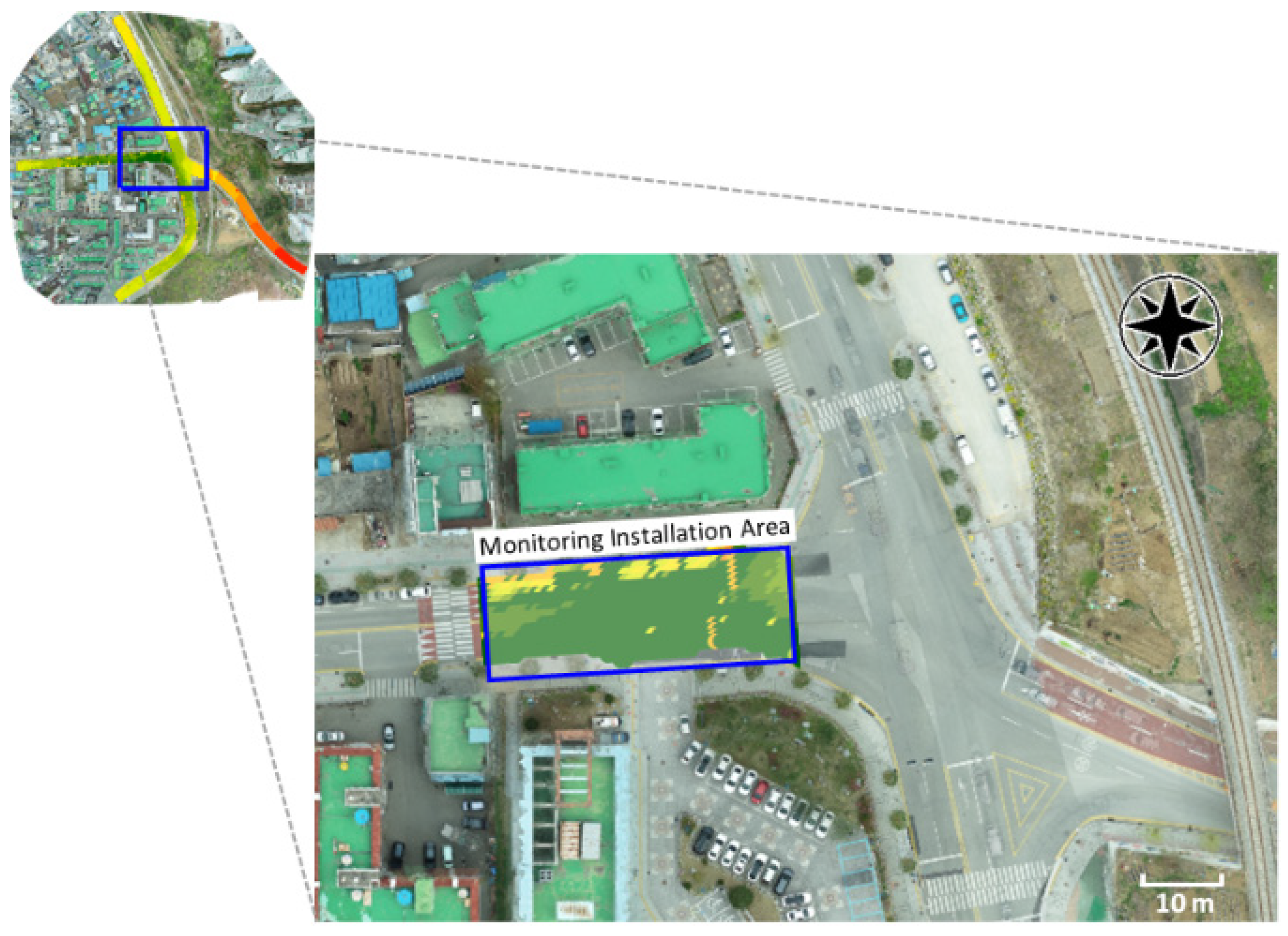
- Low-lying areas, where rainwater converged in the target area, were examined to select the optimal monitoring points for the installation of the observation equipment.
2. Materials and Methods
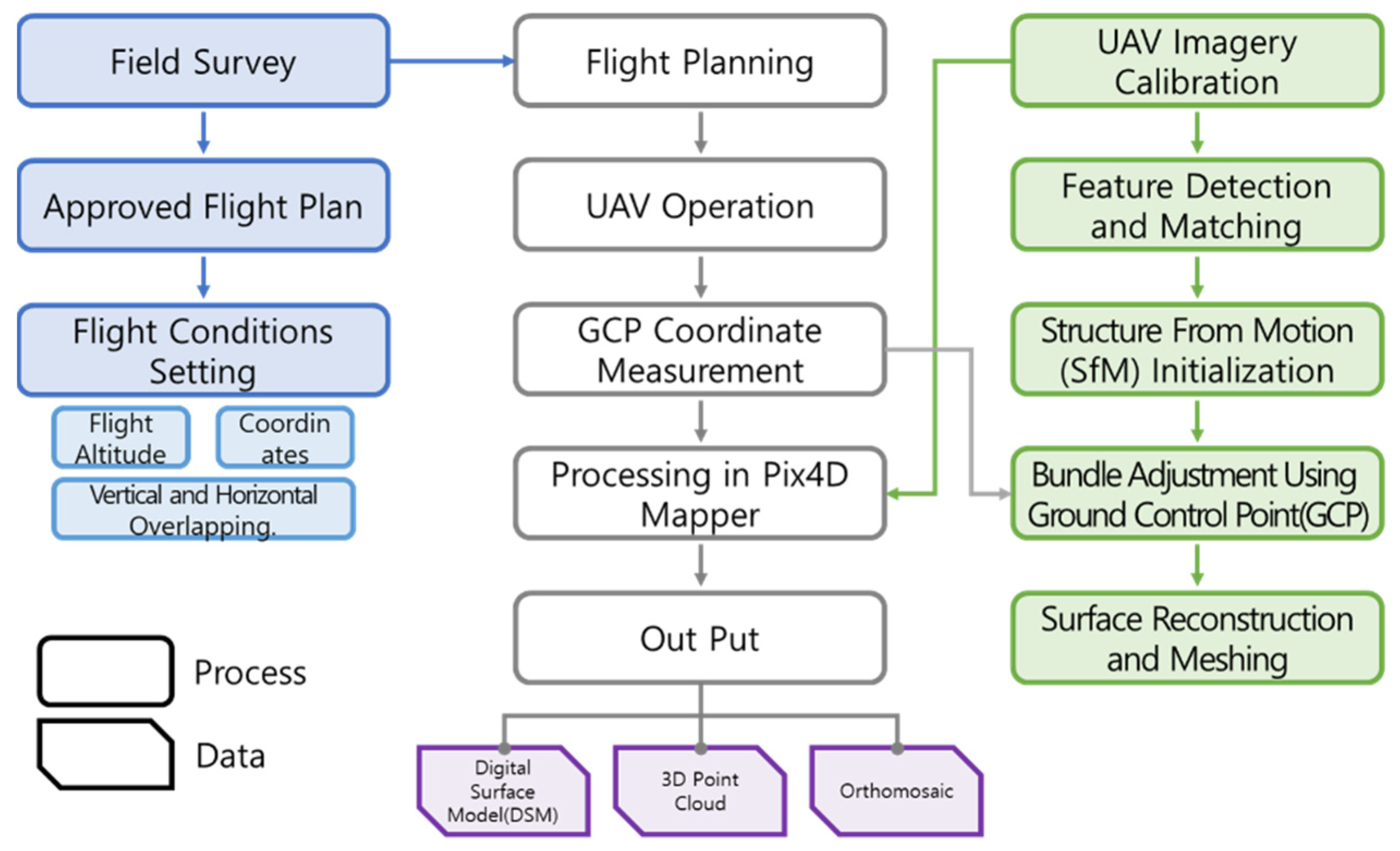
2.1. Analysis Method Using UAV
2.2. Observation Equipment
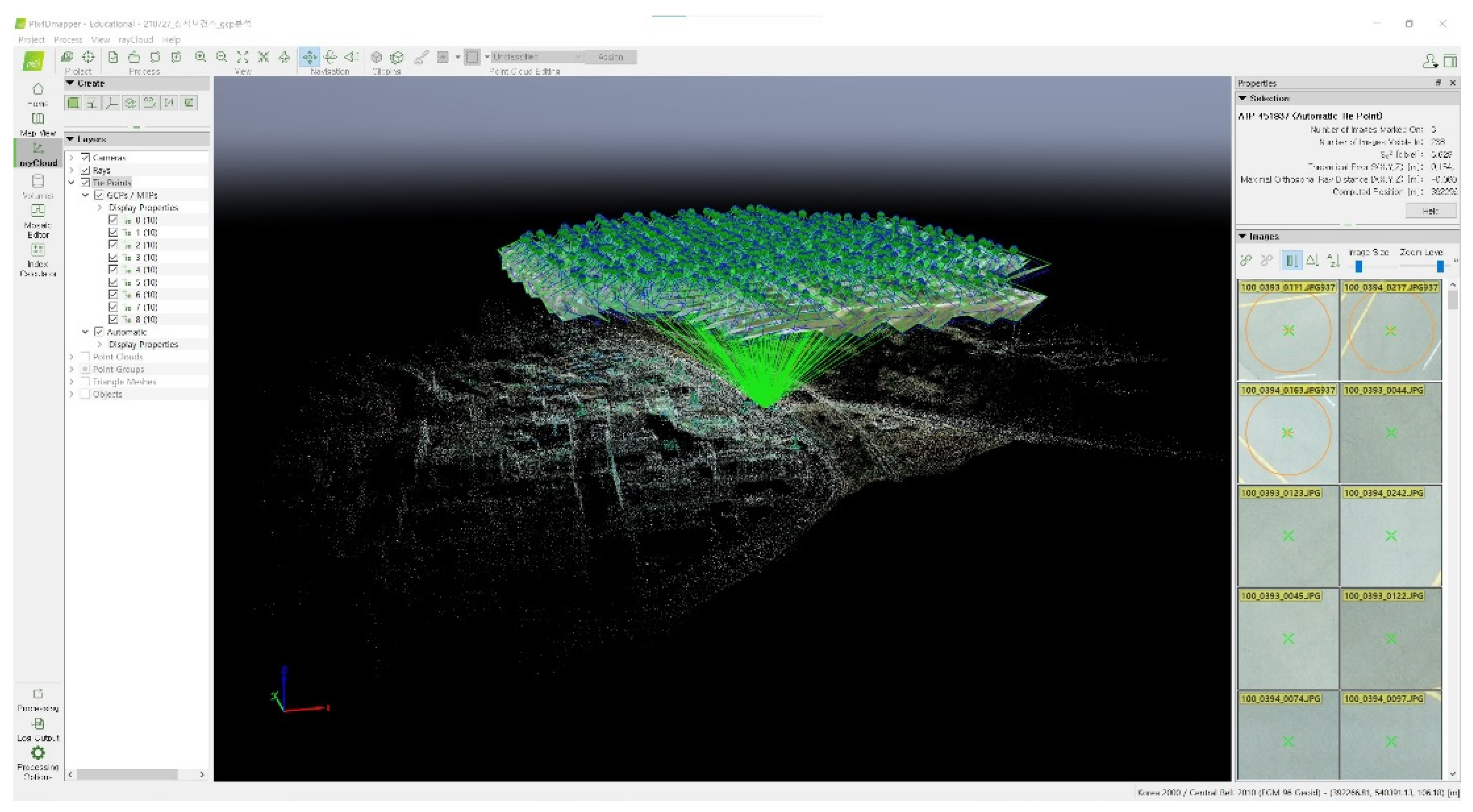
2.3. Software of Pix4D Mapper
2.4. Watershed Analysis
3. Results
3.1. Construction of Topographic Data Using a UAV
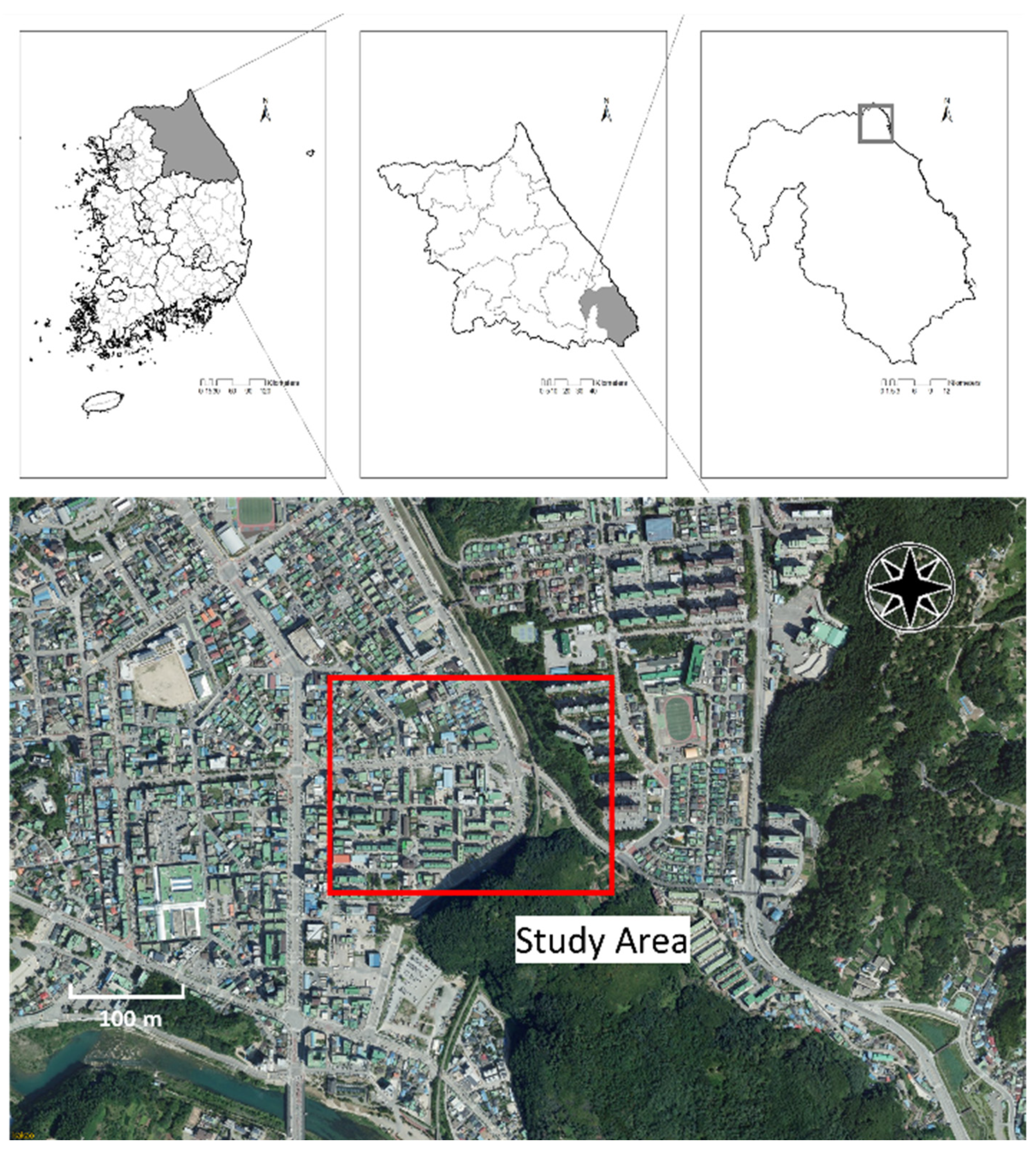
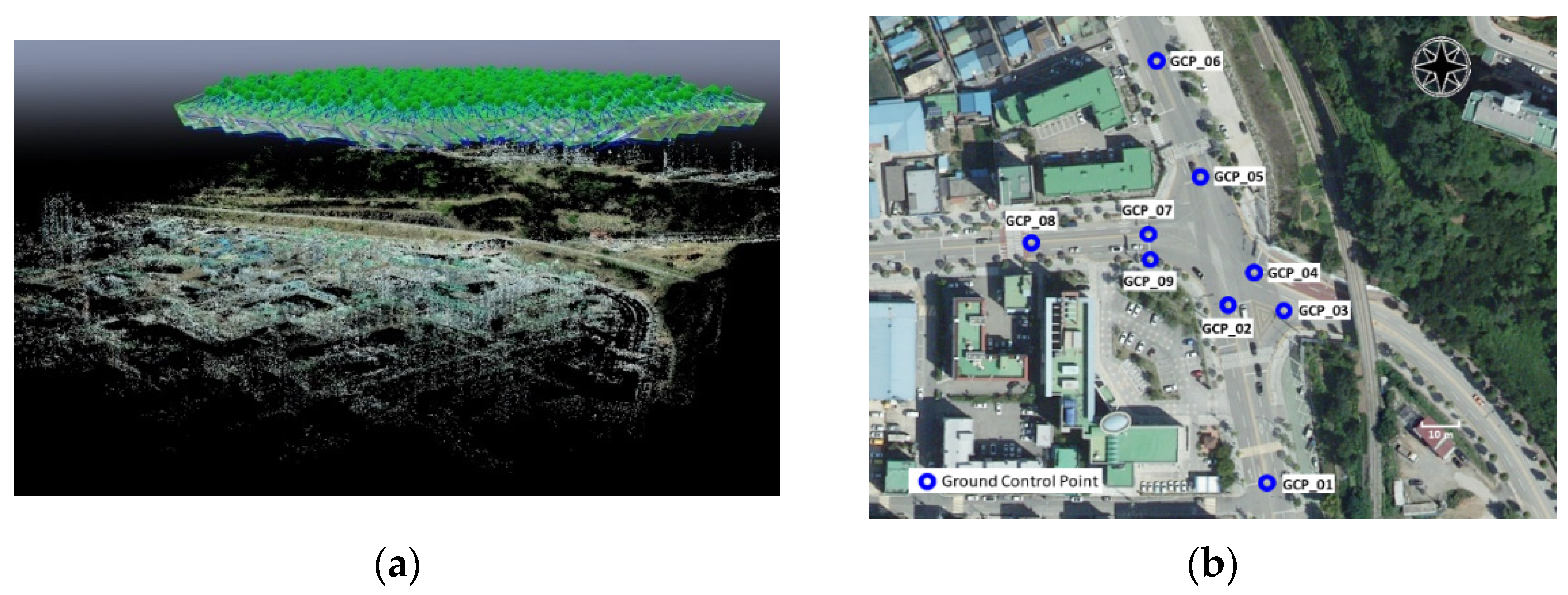
3.1.1. Target Area and UAV Area Operation Conditions
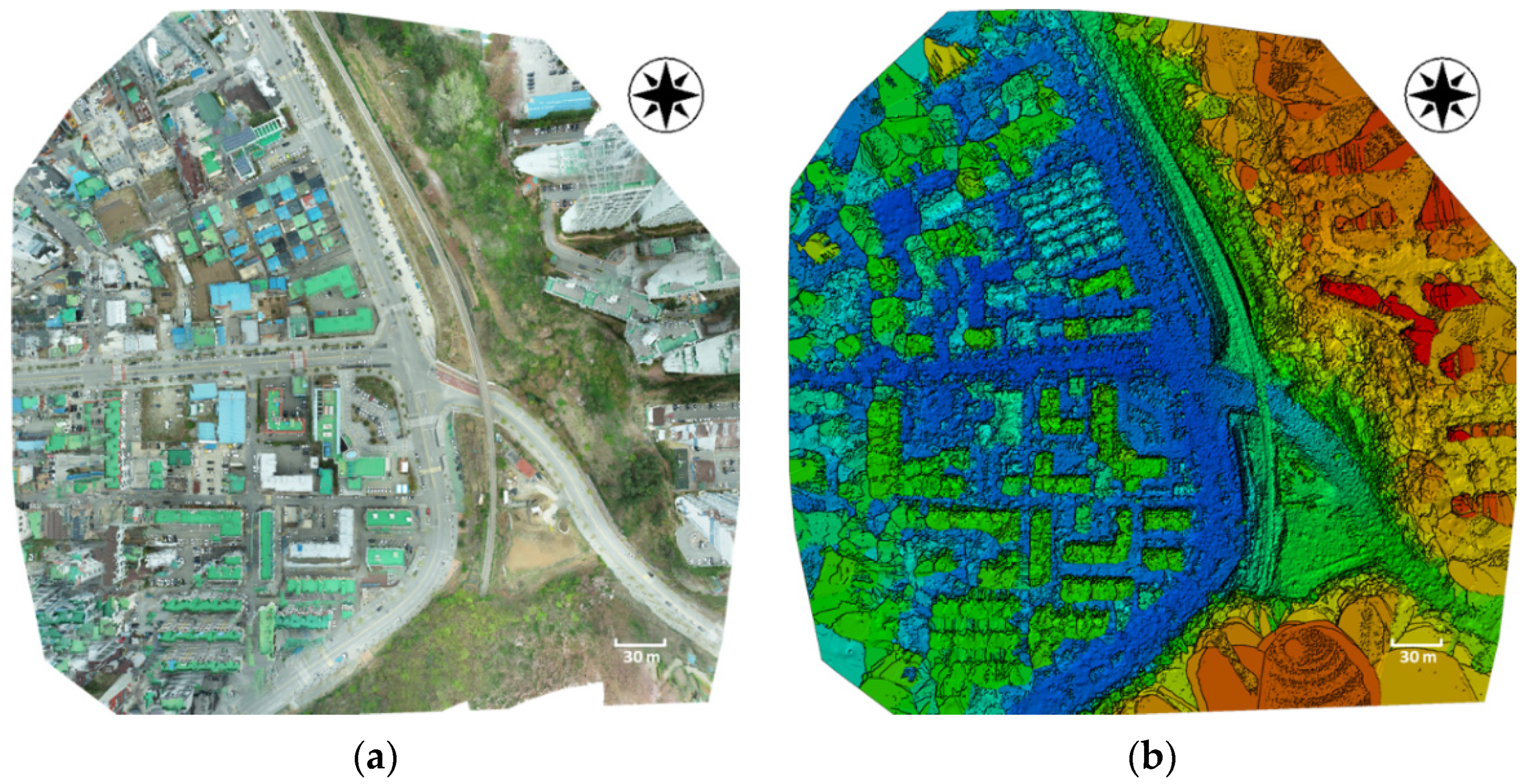
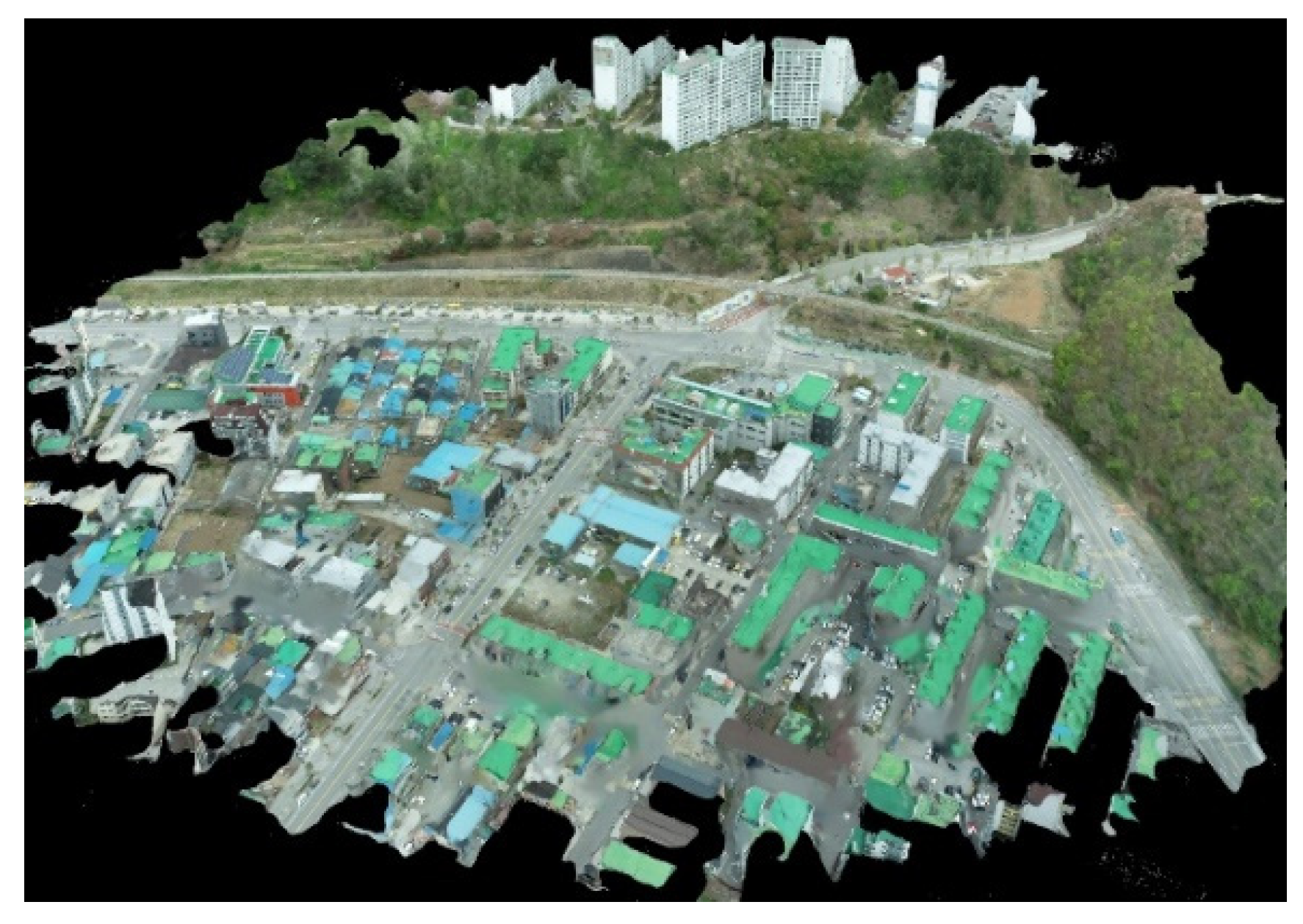
3.1.2. Construction of the Topographic Data
3.2. Selection of Monitoring Points in the Urban Area
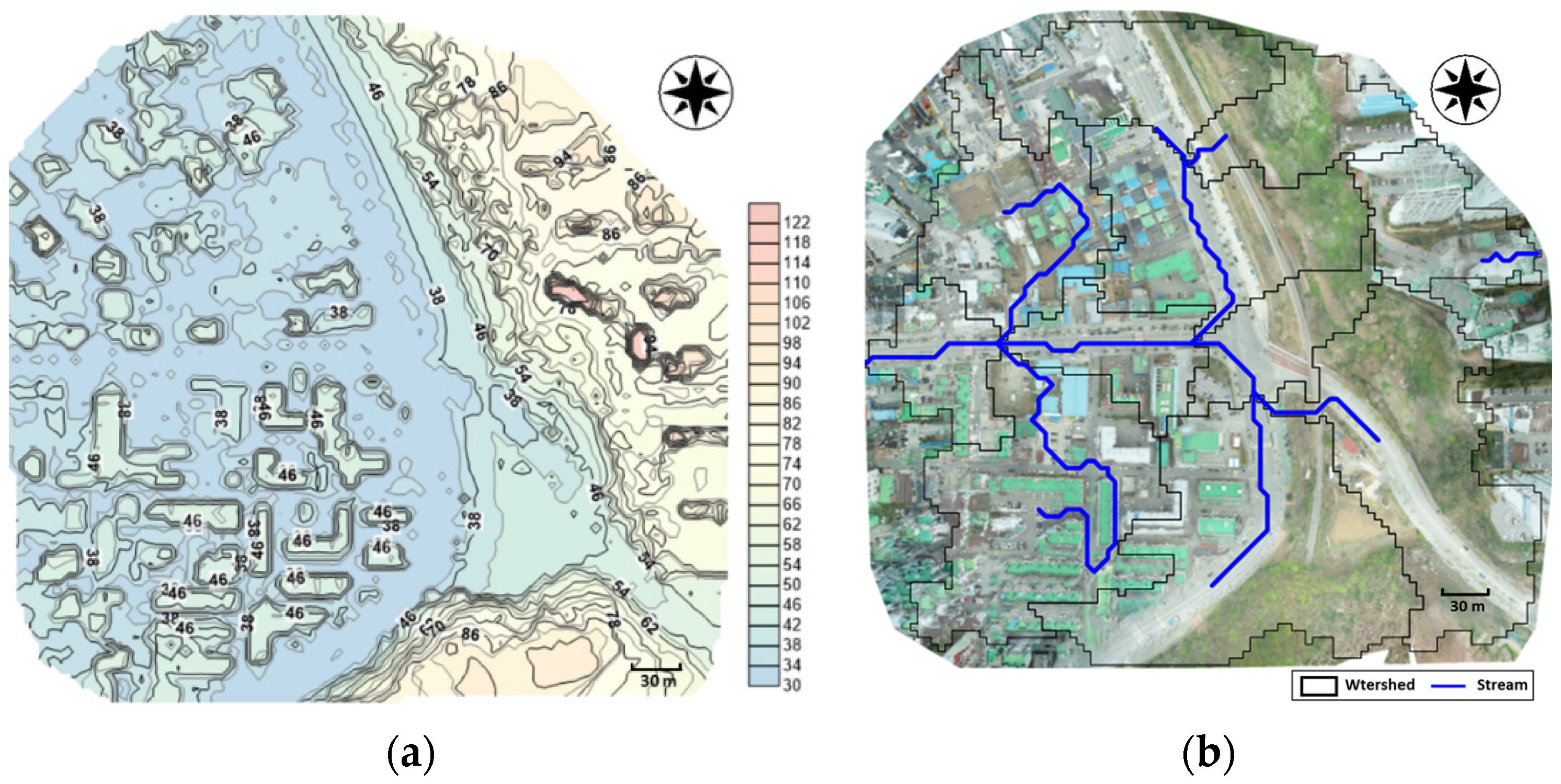
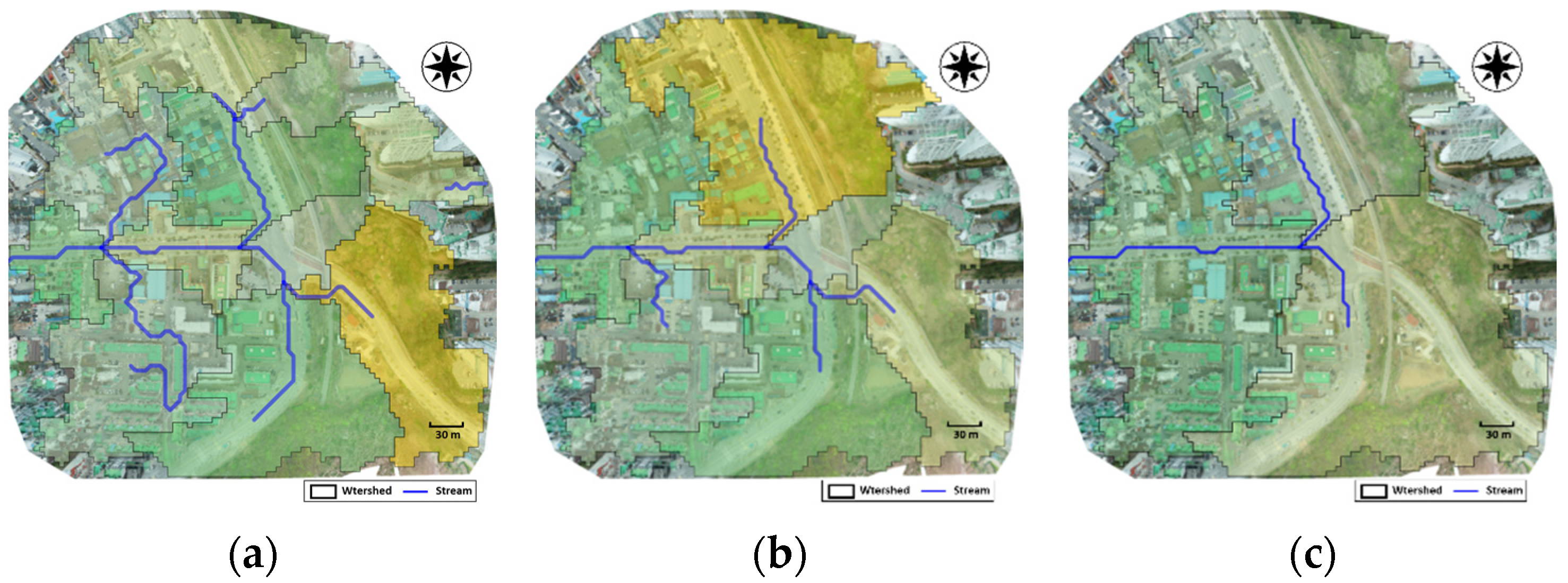
3.2.1. Watershed Analysis Using the Topographic Data
3.2.2. Selection of Monitoring Points for the Installation of the Observation Equipment
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deng, W.; Tang, D.; Lu, K.; Tang, G. Multiple target recognition of UAV based on image processing. J. Phys. Conf. Ser. 2019, 1303, 012115. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef] [Green Version]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.J.; Faias, S.P.; Tomé, M.; Díaz-Varela, R.A. Use of Multi-Temporal UAV-Derived Imagery for Estimating Individual Tree Growth in Pinus pinea Stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]
- Bagaram, M.B.; Giuliarelli, D.; Chirici, G.; Giannetti, F.; Barbati, A. UAV Remote Sensing for Biodiversity Monitoring: Are Forest Canopy Gaps Good Covariates? Remote Sens. 2018, 10, 1397. [Google Scholar] [CrossRef]
- Li, J.; Yang, B.; Cong, Y.; Cao, L.; Fu, X.; Dong, Z. 3D Forest Mapping Using A Low-Cost UAV Laser Scanning System: Investigation and Comparison. Remote Sens. 2019, 11, 717. [Google Scholar] [CrossRef] [Green Version]
- Durfee, N.; Ochoa, C.G.; Mata-Gonzalez, R. The Use of Low-Altitude UAV Imagery to Assess Western Juniper Density and Canopy Cover in Treated and Untreated Stands. Forests 2019, 10, 296. [Google Scholar] [CrossRef] [Green Version]
- González-Jaramillo, V.; Fries, A.; Bendix, J. AGB Estimation in a Tropical Mountain Forest (TMF) by Means of RGB and Multispectral Images Using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2019, 11, 1413. [Google Scholar] [CrossRef] [Green Version]
- Nuijten, R.J.G.; Coops, N.C.; Goodbody, T.R.H.; Pelletier, G. Examining the Multi-Seasonal Consistency of Individual Tree Segmentation on Deciduous Stands Using Digital Aerial Photogrammetry (DAP) and Unmanned Aerial Systems (UAS). Remote Sens. 2019, 11, 739. [Google Scholar] [CrossRef] [Green Version]
- Gharibi, M.; Boutaba, R.; Waslander, S.L. Internet of Drones. IEEE Access 2016, 4, 1148–1162. [Google Scholar] [CrossRef]
- Labib, N.S.; Brust, M.R.; Danoy, G.; Bouvry, P. The Rise of Drones in Internet of Things: A Survey on the Evolution, Prospects and Challenges of Unmanned Aerial Vehicles. IEEE Access 2021, 9, 115466–115487. [Google Scholar] [CrossRef]
- Naqvi, S.A.R.; Hassan, S.A.; Pervaiz, H.; Ni, Q. Drone-Aided Communication as a Key Enabler for 5G and Resilient Public Safety Networks. IEEE Commun. Mag. 2018, 56, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Zecevic, Z.; Popovic, T.; Krstajic, B. Cloud Based Solution for Automatic Image Mosaicking and Georeferencing. In Proceedings of the 22nd International Scientific-Professional Conference Information Technology, Zabljak, Montenegro, 27 February–4 March 2017. [Google Scholar]
- Niederheiser, R.; Mokros, M.; Lange, J.; Petschko, H.; Prasicek, G.; Oude Elberink, S.J. Deriving 3D point clouds from terrestrial photographs: Comparison of different sensors and software. In Proceedings of the 23rd International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences Congress, ISPRS 2016, Prague, Czech Republic, 12–19 July 2016; Halounova, L., Ed.; International Society for Photogrammetry and Remote Sensing (ISPRS): Prague, Czech Republic, 2016; pp. 685–692. [Google Scholar] [CrossRef] [Green Version]
- Haala, N.; Cavegn, S. High Density Aerial Image Matching: State-of-the-Art and Future Prospects. Isprs—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B4, 625–630. [Google Scholar] [CrossRef] [Green Version]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef] [Green Version]
- Haala, N. The Landscape of Dense Image Matching Algorithms; Wichmann/VDE Verlag, Belin & Offenbach: Berlin, Germany, 2013. [Google Scholar]
- Alidoost, F.; Arefi, H. Comparison of Uas-Based Photogrammetry Software for 3d Point Cloud Generation: A Survey over a Historical Site. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, IV-4/W4, 55–61. [Google Scholar] [CrossRef] [Green Version]
- Burns, J.H.R.; Delparte, D. Comparison of Commercial Structure-From Photogrammety Software Used for Underwater Three-Dimensional Modeling of Coral Reef Environments. ISPRS—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42W3, 127–131. [Google Scholar] [CrossRef] [Green Version]
- Svensk, J. Evaluation of Aerial Image Stereo Matching Methods for Forest Variable Estimation. 2017. Available online: https://core.ac.uk/display/132482225 (accessed on 15 February 2022).
- Kitagawa, E.; Muraki, H.; Yoshinaga, K.; Yamagishi, J.; Tsumura, Y. Research on Shape Characteristic of 3d Modeling Software (SfM/MVS) in Uav Aerial Images. J. Jpn. Soc. Civ. Eng. Ser. F3 (Civ. Eng. Inform.) 2018, 74, II_143–II_148. [Google Scholar] [CrossRef]
- Jaud, M.; Passot, S.; Le Bivic, R.; Delacourt, C.; Grandjean, P.; Le Dantec, N. Assessing the Accuracy of High Resolution Digital Surface Models Computed by PhotoScan® and MicMac® in Sub-Optimal Survey Conditions. Remote Sens. 2016, 8, 465. [Google Scholar] [CrossRef] [Green Version]
- Escobar Villanueva, J.R.; Iglesias Martínez, L.; Pérez Montiel, J.I. DEM Generation from Fixed-Wing UAV Imaging and LiDAR-Derived Ground Control Points for Flood Estimations. Sensors 2019, 19, 3205. [Google Scholar] [CrossRef] [Green Version]
- Casella, V.; Chiabrando, F.; Franzini, M.; Manzino, A.M. Accuracy Assessment of a UAV Block by Different Software Packages, Processing Schemes and Validation Strategies. ISPRS Int. J. Geo-Inf. 2020, 9, 164. [Google Scholar] [CrossRef] [Green Version]
- Fraser, B.T.; Congalton, R.G. Issues in Unmanned Aerial Systems (UAS) Data Collection of Complex Forest Environments. Remote Sens. 2018, 10, 908. [Google Scholar] [CrossRef] [Green Version]
- Hardin, P.J.; Lulla, V.; Jensen, R.R.; Jensen, J.R. Small Unmanned Aerial Systems (sUAS) for environmental remote sensing: Challenges and opportunities revisited. GISci. Remote Sens. 2019, 56, 309–322. [Google Scholar] [CrossRef]
- Oniga, V.-E.; Breaban, A.-I.; Statescu, F. Determining the Optimum Number of Ground Control Points for Obtaining High Precision Results Based on UAS Images. Proceedings 2018, 2, 352. [Google Scholar] [CrossRef] [Green Version]
- Chaudhry, M.H.; Ahmad, A.; Gulzar, Q.; Farid, M.S.; Shahabi, H.; Al-Ansari, N. Assessment of DSM Based on Radiometric Transformation of UAV Data. Sensors 2021, 21, 1649. [Google Scholar] [CrossRef]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing Accuracy and Repeatability of UAV Blocks Oriented with GNSS-Supported Aerial Triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef] [Green Version]
- Varbla, S.; Puust, R.; Ellmann, A. Accuracy assessment of RTK-GNSS equipped UAV conducted as-built surveys for construction site modelling. Surv. Rev. 2021, 53, 477–492. [Google Scholar] [CrossRef]
- Bertacchi, A.; Giannini, V.; Di Franco, C.; Silvestri, N. Using unmanned aerial vehicles for vegetation mapping and identification of botanical species in wetlands. Landsc. Ecol. Eng. 2019, 15, 231–240. [Google Scholar] [CrossRef]
- Murray, N.J.; Keith, D.A.; Bland, L.M.; Ferrari, R.; Lyons, M.B.; Lucas, R.; Pettorelli, N.; Nicholson, E. The role of satellite remote sensing in structured ecosystem risk assessments. Sci. Total Environ. 2018, 619–620, 249–257. [Google Scholar] [CrossRef] [Green Version]
- Oostdijk, M.; Santos, M.J.; Whigham, D.; Verhoeven, J.; Silvestri, S. Assessing rehabilitation of managed mangrove ecosystems using high resolution remote sensing. Estuar. Coast. Shelf Sci. 2018, 211, 238–247. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Granger, J.E.; Mohammadimanesh, F.; Salehi, B.; Brisco, B.; Homayouni, S.; Gill, E.; Huberty, B.; Lang, M. Meta-Analysis of Wetland Classification Using Remote Sensing: A Systematic Review of a 40-Year Trend in North America. Remote Sens. 2020, 12, 1882. [Google Scholar] [CrossRef]
- Bhatnagar, S.; Gill, L.; Ghosh, B. Drone Image Segmentation Using Machine and Deep Learning for Mapping Raised Bog Vegetation Communities. Remote Sens. 2020, 12, 2602. [Google Scholar] [CrossRef]
- Murugan, D.; Garg, A.; Singh, D. Development of an Adaptive Approach for Precision Agriculture Monitoring with Drone and Satellite Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5322–5328. [Google Scholar] [CrossRef]
- Shi, Y.; Ren, C.; Lau, K.K.-L.; Ng, E. Investigating the influence of urban land use and landscape pattern on PM2.5 spatial variation using mobile monitoring and WUDAPT. Landsc. Urban Plan. 2019, 189, 15–26. [Google Scholar] [CrossRef]
- Adams, M.D.; Kanaroglou, P.S. Mapping real-time air pollution health risk for environmental management: Combining mobile and stationary air pollution monitoring with neural network models. J. Environ. Manag. 2016, 168, 133–141. [Google Scholar] [CrossRef]
- Hagler, G.S.W.; Thoma, E.D.; Baldauf, R.W. High-Resolution Mobile Monitoring of Carbon Monoxide and Ultrafine Particle Concentrations in a Near-Road Environment. J. Air Waste Manag. Assoc. 2010, 60, 328–336. [Google Scholar] [CrossRef]
- Isakov, V.; Touma, J.S.; Khlystov, A. A Method of Assessing Air Toxics Concentrations in Urban Areas Using Mobile Platform Measurements. J. Air Waste Manag. Assoc. 2007, 57, 1286–1295. [Google Scholar] [CrossRef] [Green Version]
- Westerdahl, D.; Fruin, S.; Sax, T.; Fine, P.M.; Sioutas, C. Mobile platform measurements of ultrafine particles and associated pollutant concentrations on freeways and residential streets in Los Angeles. Atmos. Environ. 2005, 39, 3597–3610. [Google Scholar] [CrossRef]
- Xu, W.; Riley, E.A.; Austin, E.; Sasakura, M.; Schaal, L.; Gould, T.R.; Hartin, K.; Simpson, C.D.; Sampson, P.D.; Yost, M.G.; et al. Use of mobile and passive badge air monitoring data for NOX and ozone air pollution spatial exposure prediction models. J. Expo. Sci. Environ. Epidemiol. 2017, 27, 184–192. [Google Scholar] [CrossRef]
- Wong, P.P.Y.; Lai, P.-C.; Allen, R.; Cheng, W.; Lee, M.; Tsui, A.; Tang, R.; Thach, T.-Q.; Tian, L.; Brauer, M.; et al. Vertical monitoring of traffic-related air pollution (TRAP) in urban street canyons of Hong Kong. Sci. Total Environ. 2019, 670, 696–703. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.; Brauer, M.; Wong, P.; Tang, R.; Tsui, T.H.; Choi, C.; Cheng, W.; Lai, P.-C.; Tian, L.; Thach, T.-Q.; et al. Land use regression modelling of air pollution in high density high rise cities: A case study in Hong Kong. Sci. Total Environ. 2017, 592, 306–315. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, R.; Tian, L.; Thach, T.-Q.; Tsui, T.H.; Brauer, M.; Lee, M.; Allen, R.; Yuchi, W.; Lai, P.-C.; Wong, P.; et al. Integrating travel behavior with land use regression to estimate dynamic air pollution exposure in Hong Kong. Environ. Int. 2018, 113, 100–108. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, Y.; Tang, R.; Qiu, H.; Lai, P.-C.; Wong, P.; Thach, T.-Q.; Allen, R.; Brauer, M.; Tian, L.; Barratt, B. Long term exposure to air pollution and mortality in an elderly cohort in Hong Kong. Environ. Int. 2018, 117, 99–106. [Google Scholar] [CrossRef] [Green Version]
- Chan, L.Y.; Kwok, W.S. Vertical dispersion of suspended particulates in urban area of Hong Kong. Atmos. Environ. 2000, 34, 4403–4412. [Google Scholar] [CrossRef]
- Vardoulakis, S.; Gonzalez-Flesca, N.; Fisher, B.E.A. Assessment of traffic-related air pollution in two street canyons in Paris: Implications for exposure studies. Atmos. Environ. 2002, 36, 1025–1039. [Google Scholar] [CrossRef]
- Janhäll, S.; Molnár, P.; Hallquist, M. Vertical distribution of air pollutants at the Gustavii Cathedral in Göteborg, Sweden. Atmos. Environ. 2003, 37, 209–217. [Google Scholar] [CrossRef]
- Wu, C.-D.; MacNaughton, P.; Melly, S.; Lane, K.; Adamkiewicz, G.; Durant, J.L.; Brugge, D.; Spengler, J.D. Mapping the vertical distribution of population and particulate air pollution in a near-highway urban neighborhood: Implications for exposure assessment. J. Expo. Sci. Environ. Epidemiol. 2014, 24, 297–304. [Google Scholar] [CrossRef] [Green Version]
- Li, X.L.; Wang, J.S.; Tu, X.D.; Liu, W.; Huang, Z. Vertical variations of particle number concentration and size distribution in a street canyon in Shanghai, China. Sci. Total Environ. 2007, 378, 306–316. [Google Scholar] [CrossRef]
- Wu, Y.; Hao, J.; Fu, L.; Wang, Z.; Tang, U. Vertical and horizontal profiles of airborne particulate matter near major roads in Macao, China. Atmos. Environ. 2002, 36, 4907–4918. [Google Scholar] [CrossRef]
- Guerreiro, M.S.; Abreu, I.M.; Monteiro, Á.; Jesus, T.; Fonseca, A. Considerations on the monitoring of water quality in urban streams: A case study in Portugal. Environ. Monit. Assess. 2020, 192, 347. [Google Scholar] [CrossRef]
- Su, X.; Sutarlie, L.; Loh, X.J. Sensors, Biosensors, and Analytical Technologies for Aquaculture Water Quality. Research 2020, 2020, 8272705. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pasika, S.; Gandla, S.T. Smart water quality monitoring system with cost-effective using IoT. Heliyon 2020, 6, e04096. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.-C.; Tsai, M.-Y.; Tsai, Y.-C.; You, J.-J.; Cheng, C.-L.; Wang, J.-H.; Li, S.-J. Development of Miniaturized Water Quality Monitoring System Using Wireless Communication. Sensors 2019, 19, 3758. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sambito, M.; Di Cristo, C.; Freni, G.; Leopardi, A. Optimal water quality sensor positioning in urban drainage systems for illicit intrusion identification. J. Hydroinform. 2019, 22, 46–60. [Google Scholar] [CrossRef]
- Kotamäki, N.; Järvinen, M.; Kauppila, P.; Korpinen, S.; Lensu, A.; Malve, O.; Mitikka, S.; Silander, J.; Kettunen, J. A practical approach to improve the statistical performance of surface water monitoring networks. Environ. Monit. Assess. 2019, 191, 318. [Google Scholar] [CrossRef] [Green Version]
- Pekey, H.; Karakaş, D.; Bakoglu, M. Source apportionment of trace metals in surface waters of a polluted stream using multivariate statistical analyses. Mar. Pollut. Bull. 2004, 49, 809–818. [Google Scholar] [CrossRef]
- Shrestha, S.; Kazama, F. Assessment of surface water quality using multivariate statistical techniques: A case study of the Fuji river basin, Japan. Environ. Model. Softw. 2007, 22, 464–475. [Google Scholar] [CrossRef]
- Sambito, M.; Freni, G. Strategies for Improving Optimal Positioning of Quality Sensors in Urban Drainage Systems for Non-Conservative Contaminants. Water 2021, 13, 934. [Google Scholar] [CrossRef]
- Schumann, G.J.P.; Muhlhausen, J.; Andreadis, K.M. Rapid Mapping of Small-Scale River-Floodplain Environments Using UAV SfM Supports Classical Theory. Remote Sens. 2019, 11, 982. [Google Scholar] [CrossRef] [Green Version]
- Annis, A.; Nardi, F.; Petroselli, A.; Apollonio, C.; Arcangeletti, E.; Tauro, F.; Belli, C.; Bianconi, R.; Grimaldi, S. UAV-DEMs for Small-Scale Flood Hazard Mapping. Water 2020, 12, 1717. [Google Scholar] [CrossRef]
- Backes, D.; Schumann, G.; Teferele, F.N.; Boehm, J. Towards a High-Resolution Drone-Based 3D Mapping Dataset to Optimise Flood Hazard Modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.—ISPRS Arch. 2019, 42, 181–187. [Google Scholar] [CrossRef] [Green Version]
- Mourato, S.; Fernandez, P.; Pereira, L.; Moreira, M. Improving a DSM Obtained by Unmanned Aerial Vehicles for Flood Modelling. IOP Conf. Ser. Earth Environ. Sci. 2017, 95, 022014. [Google Scholar] [CrossRef]
- Langhammer, J.; Bernsteinová, J.; Miřijovský, J. Building a High-Precision 2D Hydrodynamic Flood Model Using UAV Photogrammetry and Sensor Network Monitoring. Water 2017, 9, 861. [Google Scholar] [CrossRef]
- Watson, C.; Kargel, J.; Tiruwa, B. UAV-Derived Himalayan Topography: Hazard Assessments and Comparison with Global DEM Products. Drones 2019, 3, 18. [Google Scholar] [CrossRef] [Green Version]
- Leitão, J.P.; Moy De Vitry, M.; Scheidegger, A.; Rieckermann, J. Assessing the Quality of Digital Elevation Models Obtained from Mini Unmanned Aerial Vehicles for Overland Flow Modelling in Urban Areas. Hydrol. Earth Syst. Sci. 2016, 20, 1637–1653. [Google Scholar] [CrossRef] [Green Version]
- Strecha, C.; Pylvänäinen, T.; Fua, P. Dynamic and scalable large scale image reconstruction. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 406–413. [Google Scholar]
- Gool, V. Dense matching of multiple wide-baseline views. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; Volume 1192, pp. 1194–1201. [Google Scholar]
- Strecha, C.; Van Gool, L.; Fua, P. A Generative Model for True Orthorectification. In Proceedings of the ISPRS Congress, Beijing, China, 3–11 July 2008. [Google Scholar]
- Strecha, C.; Von Hansen, W.; Gool, L.V.; Fua, P.; Thoennessen, U. On benchmarking camera calibration and multi-view stereo for high resolution imagery. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Agarwal, S.; Furukawa, Y.; Snavely, N.; Curless, B.; Seitz, S.M.; Szeliski, R. Reconstructing Rome. Computer 2010, 43, 40–47. [Google Scholar] [CrossRef]
- Kannala, J.; Brandt, S.S. A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1335–1340. [Google Scholar] [CrossRef] [Green Version]
- Hughes, C.; Denny, P.; Jones, E.; Glavin, M. Accuracy of fish-eye lens models. Appl. Opt. 2010, 49, 3338–3347. [Google Scholar] [CrossRef] [Green Version]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Scharstein, D.; Szeliski, R. A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms. Int. J. Comput. Vis. 2002, 47, 7–42. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV Characteristics | |
|---|---|
| Weight | 1391 g |
| Diagonal Length | 350 mm |
| Maximum Speed | Rise: 6 m/s (Automatic flight), 5 m/s (Manual control), Down: 3 m/s, 50 km/h (P Mode) 58 km/h (A Mode) |
| Maximum Flight Time | About 30 min |
| Operating Temperature Range | 0~40 °C |
| Camera Characteristics | |
| Sensors | 1” CMOS, Valid Pixel: 20 M |
| Lens | FOV 84°, 8.8 mm/24 mm, f/2.8~f/11, 1 m~∞ |
| International Organization for Standardization (ISO) Range | video: 100~3200 (Auto), 100~6400 (Manual), photo: 100~3200 (Auto), 100~12,800 (Manual) |
| Mechanical shutter speed | 8~1/2000 s |
| Electronic shutter speed | 8~1/8000 s |
| Field Of View (FOV) | Front/Rear: 60° (Horizontal), ±27° (Verticality), Down: 70° (Front and Rear), 50° (Left and Right) |
| Performance | |
|---|---|
| Channel | 240 Channel |
| Static Positioning | Horizontal: 3 mm + 0.1 ppm Verticality: 3.5 mm + 0.4 ppm |
| Virtual Reference System (VRS) | Horizontal: 8 mm + 1 ppm Verticality: 15 mm + 1 ppm |
| Input/Output | ATOM, CMR, CMR+, RTCM, CMRx, NMEA |
| Radio Modem | 410–470 MHz, 2 W output |
| Port | RS-232, USB2.0, Bluetooth 2.1 |
| Weight | 930 g |
| Operating Temperature | −40° to +65° |
| Classification | Contents | |
|---|---|---|
| Photographing Area | 0.222 km2 | |
| Photographing Altitude | El. 120 m | |
| Photographing Point Altitude | Approximate El. 60 m | |
| Overlap Rate | Longitudinal: 80%, Transverse: 80% | |
| Camera Angle | 90° | 60° |
| Number of Photographs | 179 | 336 |
| Image Coordinate | WGS84 | |
| Classification | Contents |
|---|---|
| Observation Station | Samcheok |
| Receiver Type | NetR9 |
| Antenna Type | ChokeRing |
| Radio Technical Commission for Maritime services (RTCM) Type | SAMC-RTCM30 |
| Coordination | Latitude: 37-26-9.96, Longitude: 129-11-17.16, Ellipsoid Height: 40.30 |
| Address | 196 Samcheokhang-gil, Gangwon-do. |
 | |
| Classification | Contents |
|---|---|
| Average Ground Sampling Distance (GSD) | 1 × GSD (3.4 [cm/pixel]) |
| Area Covered | 0.222 km2 |
| Images | median of 14,665 keypoints per image |
| Dataset | 515 out of 515 images calibrated (100%), all images enabled |
| Camera Optimization | 0.68% relative difference between initial and optimized internal camera parameters |
| Matching | median of 3377.6 matches per calibrated image |
| Root Mean Square Error (RMSE) | 0.051 m |
| Thresholds | Watershed (Count) | Thresholds | Watershed (Count) |
|---|---|---|---|
| 100 | 35 | 700–1000 | 7 |
| 200 | 19 | 1100–1700 | 3 |
| 300 | 11 | Over 1700 | 1 |
| 400–600 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Lee, H.; Kang, D.; Kim, B.; Park, M. A Study on the Determination Methods of Monitoring Point for Inundation Damage in Urban Area Using UAV and Hydrological Modeling. Water 2022, 14, 1117. https://doi.org/10.3390/w14071117
Song Y, Lee H, Kang D, Kim B, Park M. A Study on the Determination Methods of Monitoring Point for Inundation Damage in Urban Area Using UAV and Hydrological Modeling. Water. 2022; 14(7):1117. https://doi.org/10.3390/w14071117
Chicago/Turabian StyleSong, Youngseok, Hyeongjun Lee, Dongho Kang, Byungsik Kim, and Moojong Park. 2022. "A Study on the Determination Methods of Monitoring Point for Inundation Damage in Urban Area Using UAV and Hydrological Modeling" Water 14, no. 7: 1117. https://doi.org/10.3390/w14071117
APA StyleSong, Y., Lee, H., Kang, D., Kim, B., & Park, M. (2022). A Study on the Determination Methods of Monitoring Point for Inundation Damage in Urban Area Using UAV and Hydrological Modeling. Water, 14(7), 1117. https://doi.org/10.3390/w14071117