
Hydraulic Characteristics and Vortex Characteristics of the Flow around the Piped Vehicle with Different Diameter-to-Length Ratios

Abstract
:1. Introduction
2. Numerical Simulation Method
2.1. Geometric Model Setup and Meshing
2.2. Boundary Conditions and Governing Equations
2.3. Solving Method and Discrete Method
3. Experimental Procedure
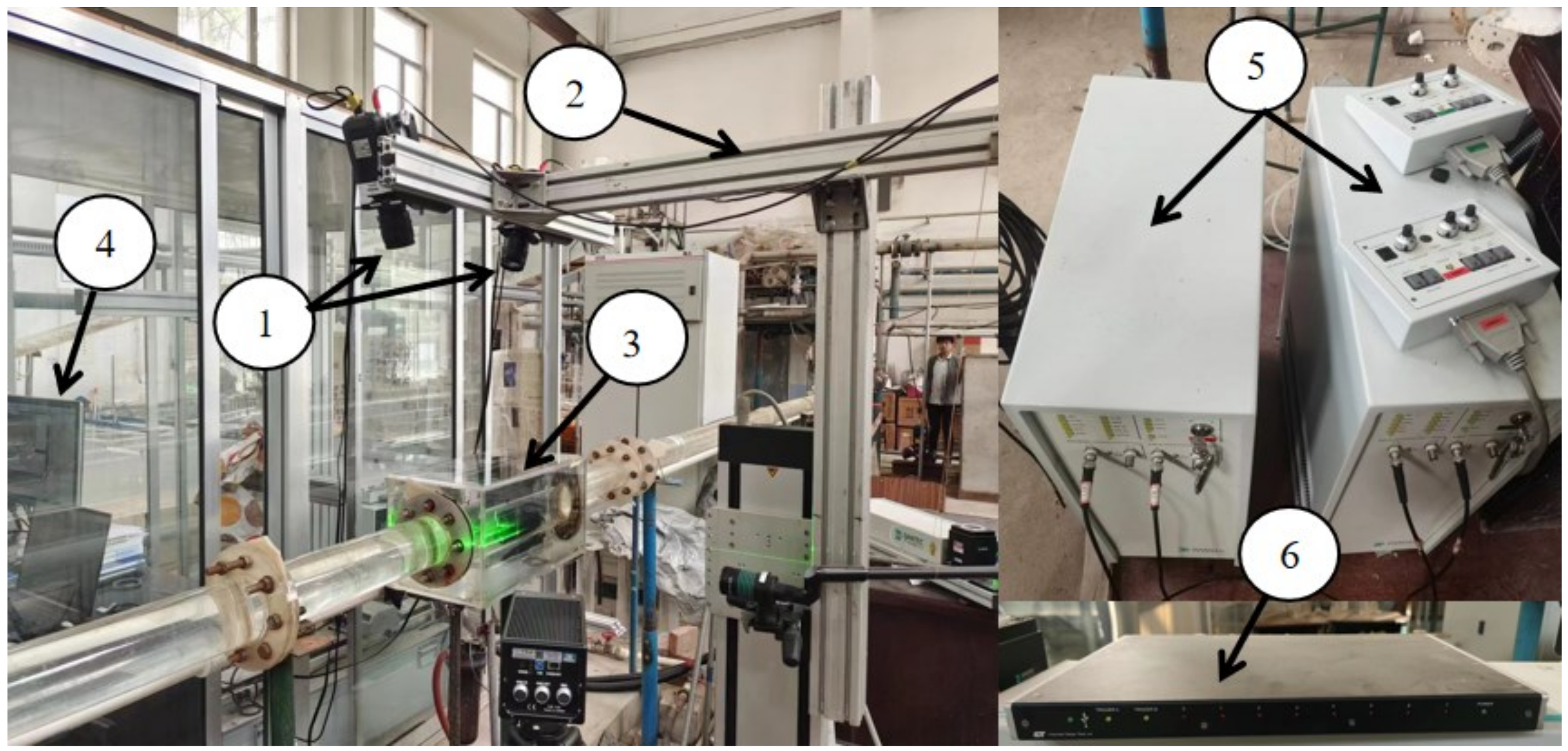
3.1. Experimental System
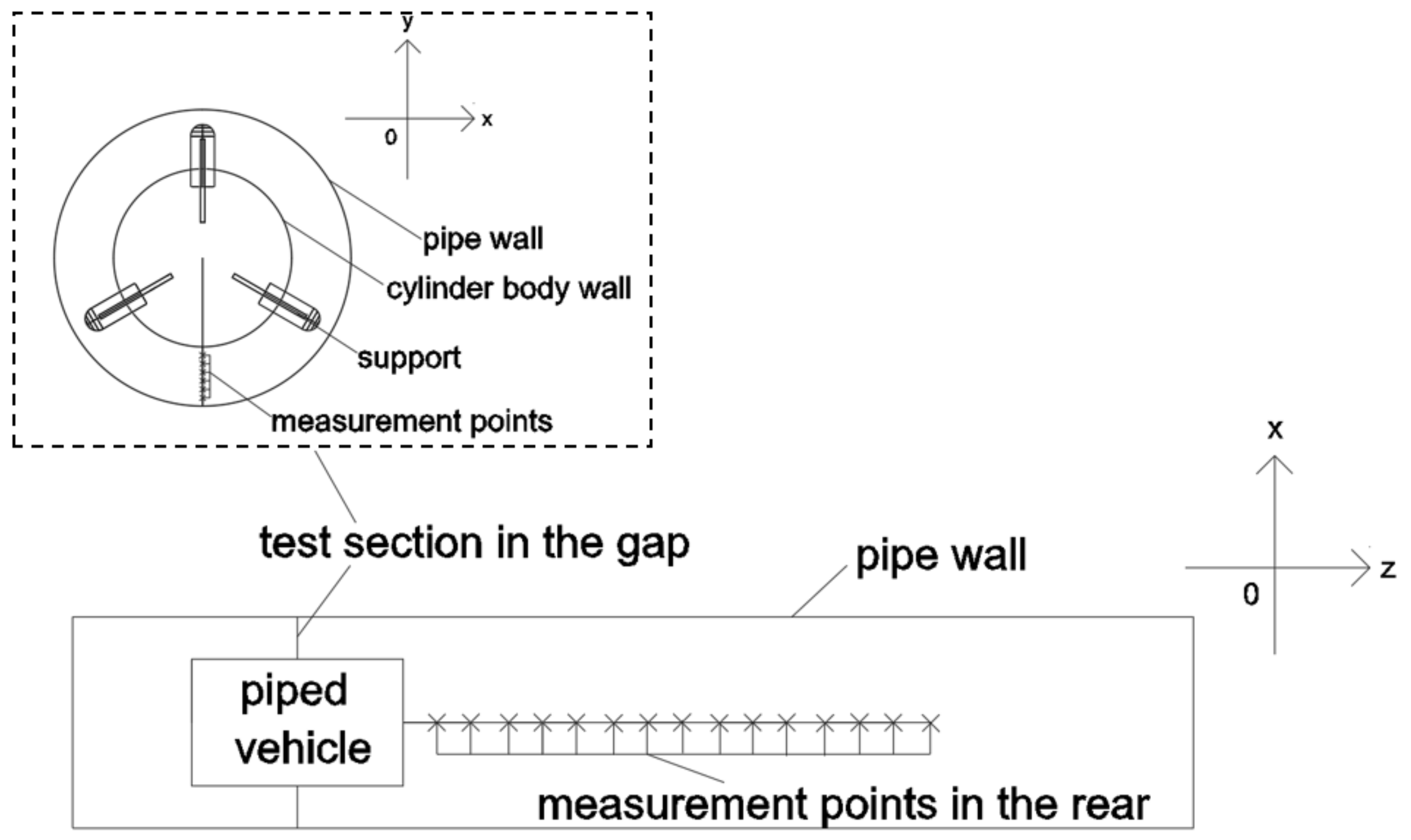
3.2. Selection of Cross-Section and Layout of Measurement Points
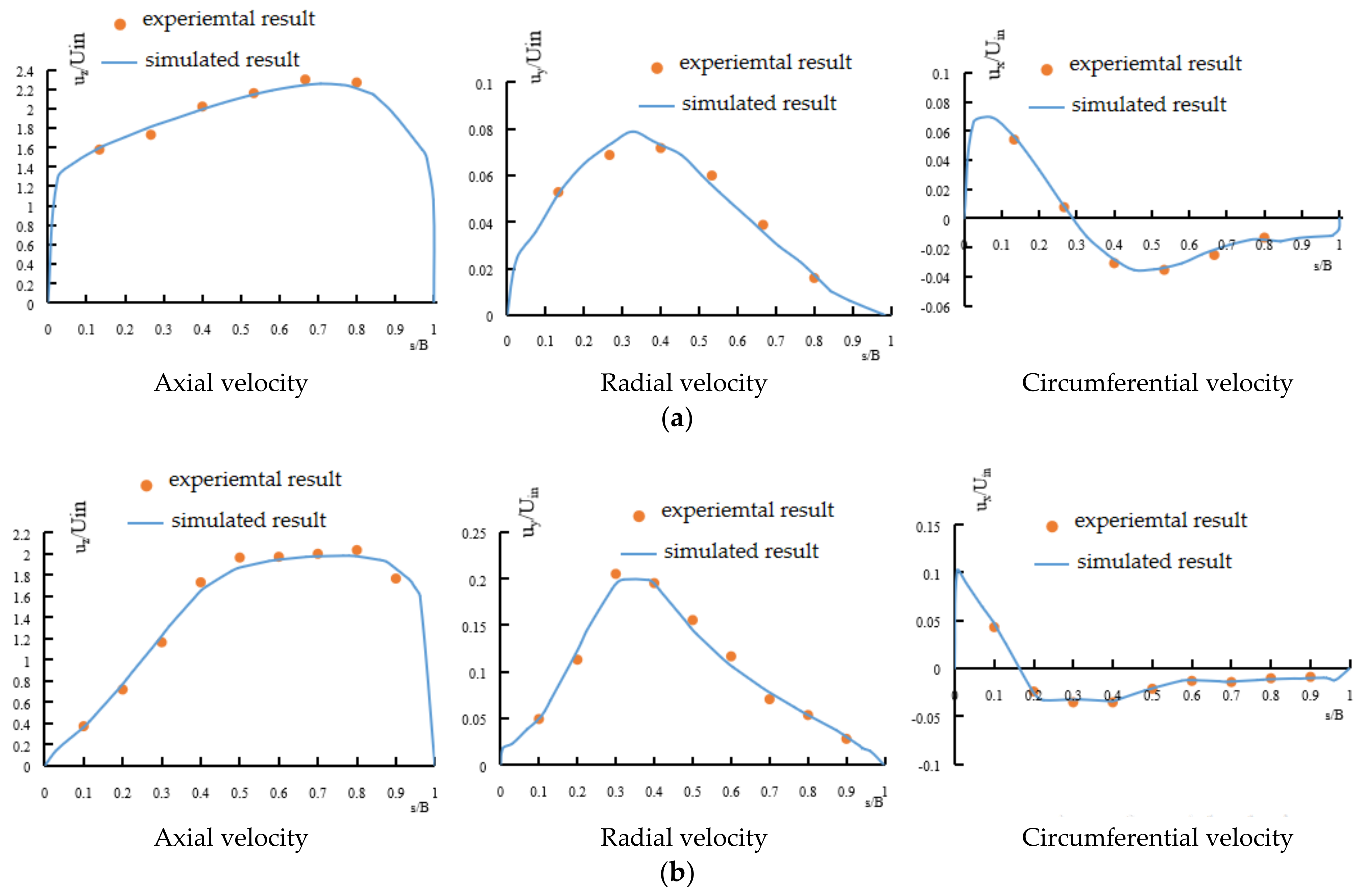
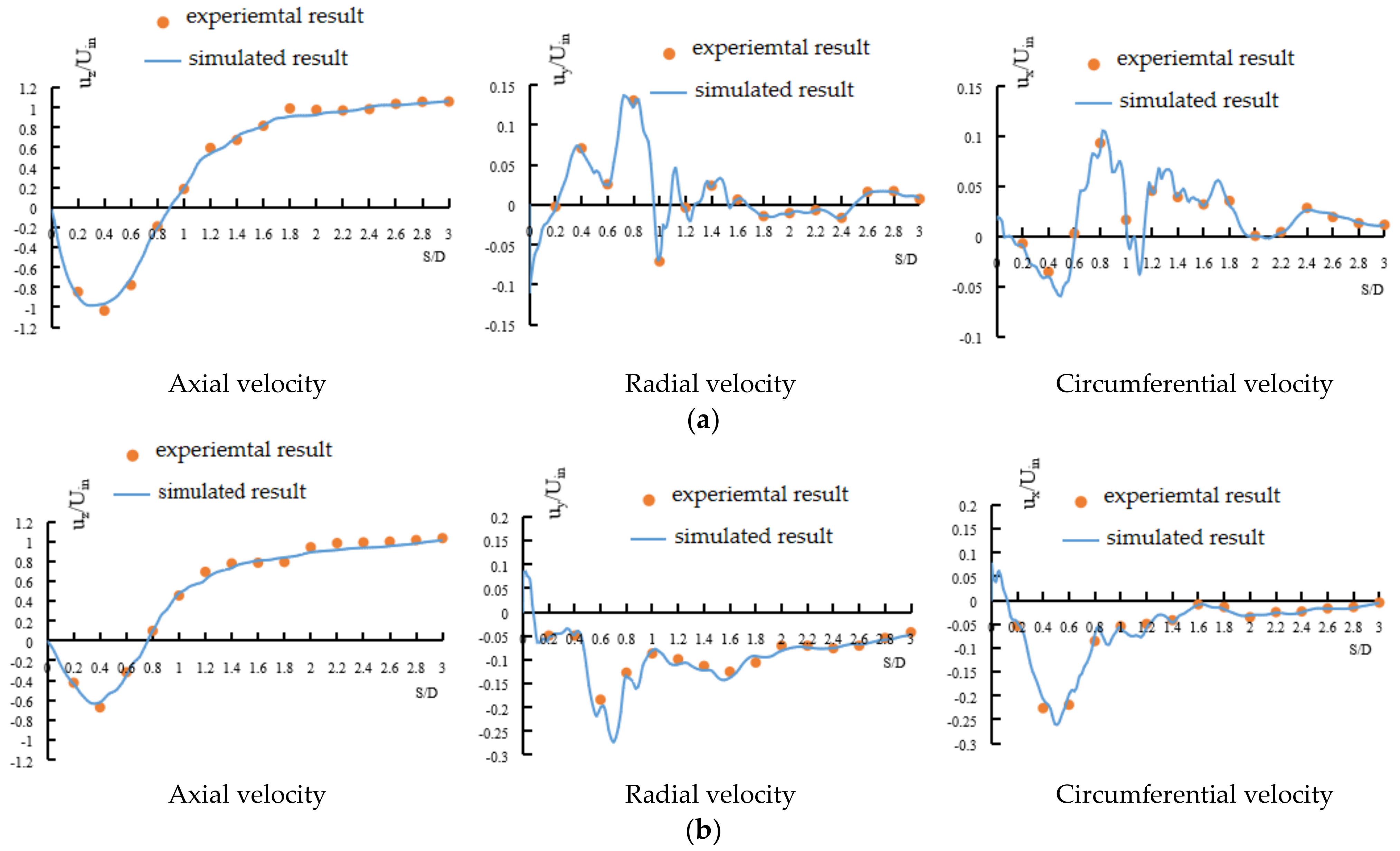
3.3. Validation of Simulated Results
4. Results and Discussion
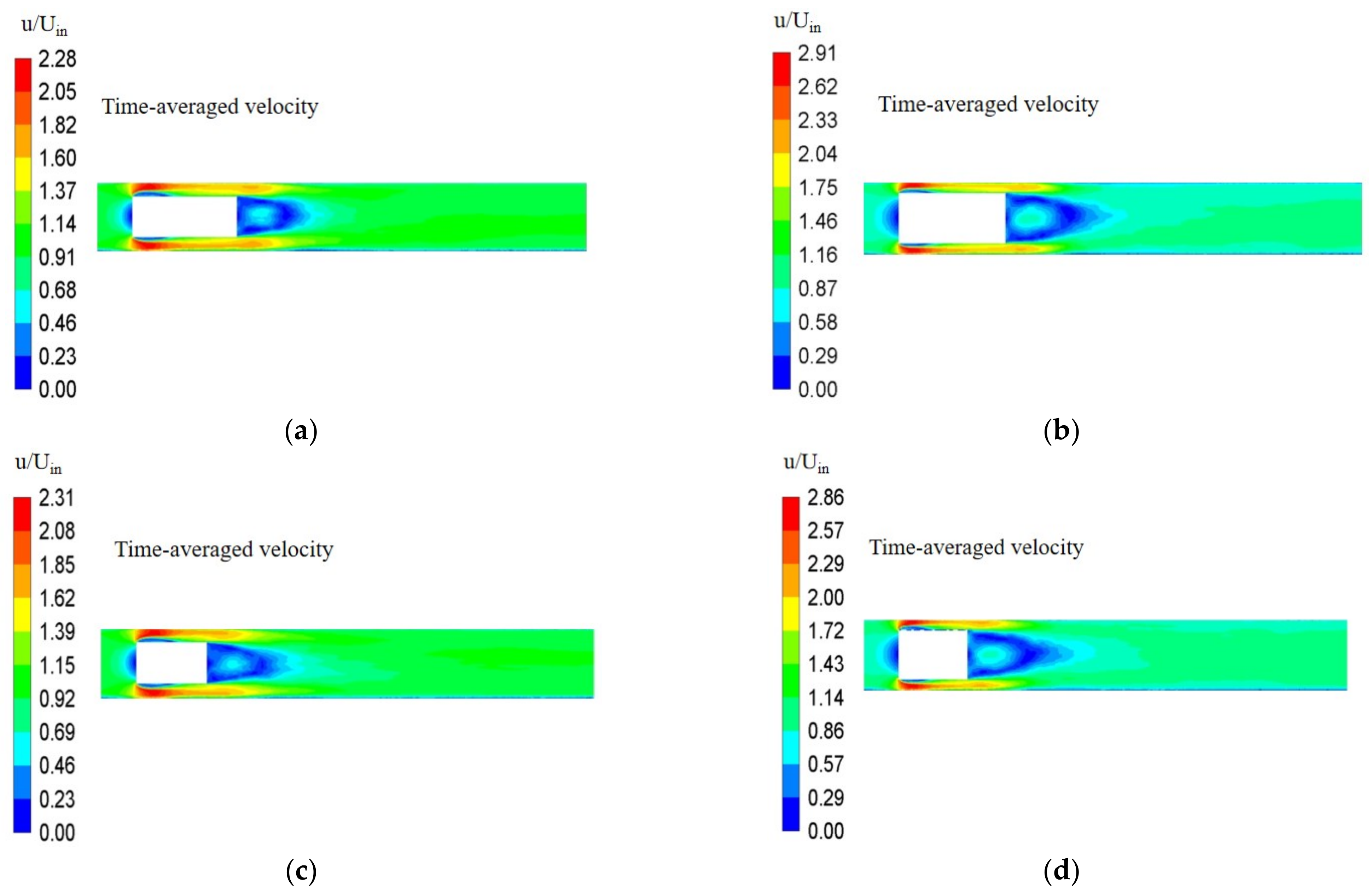
4.1. Time-Averaged Velocity Distribution
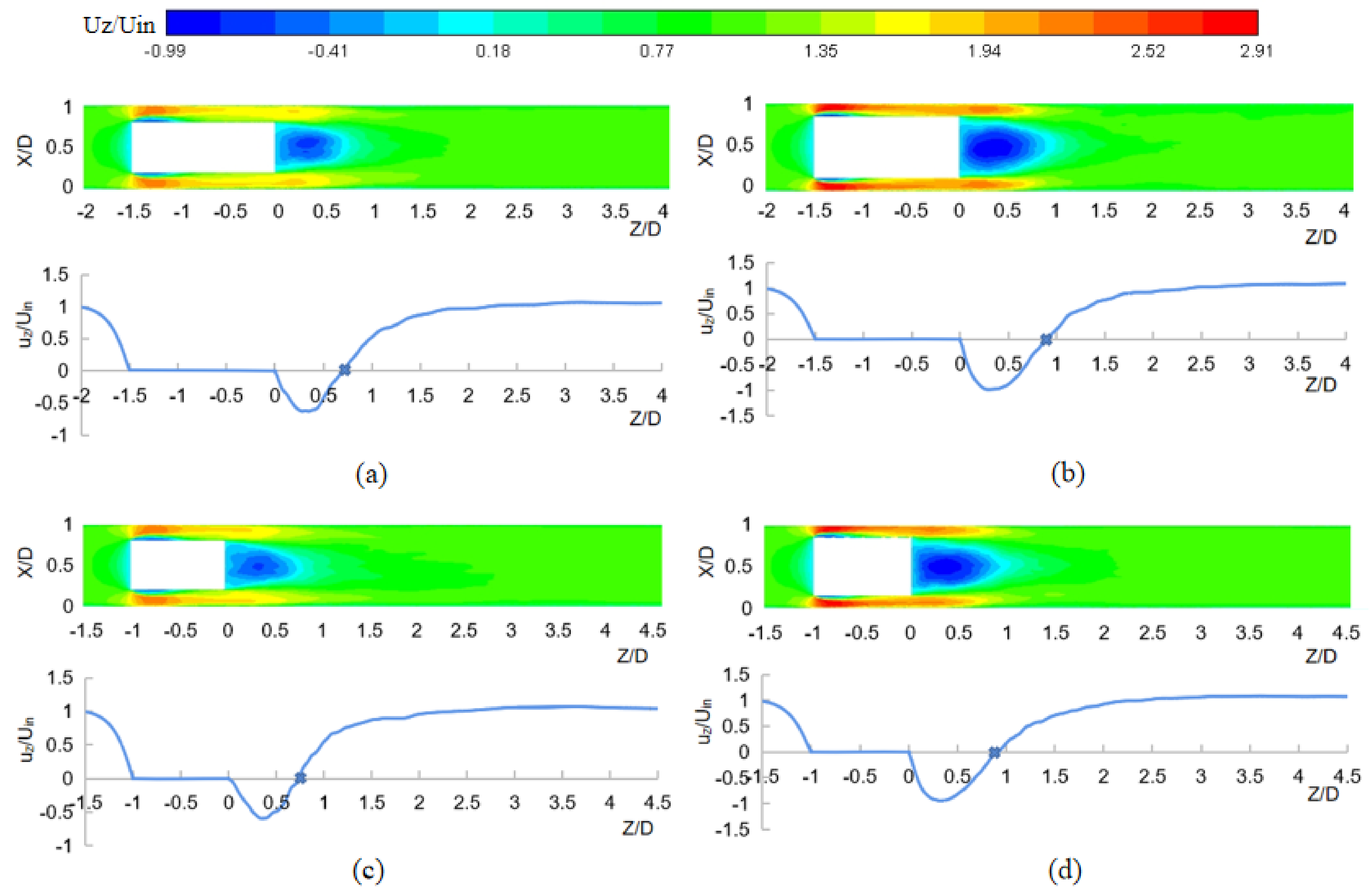
4.2. Backflow Area Length
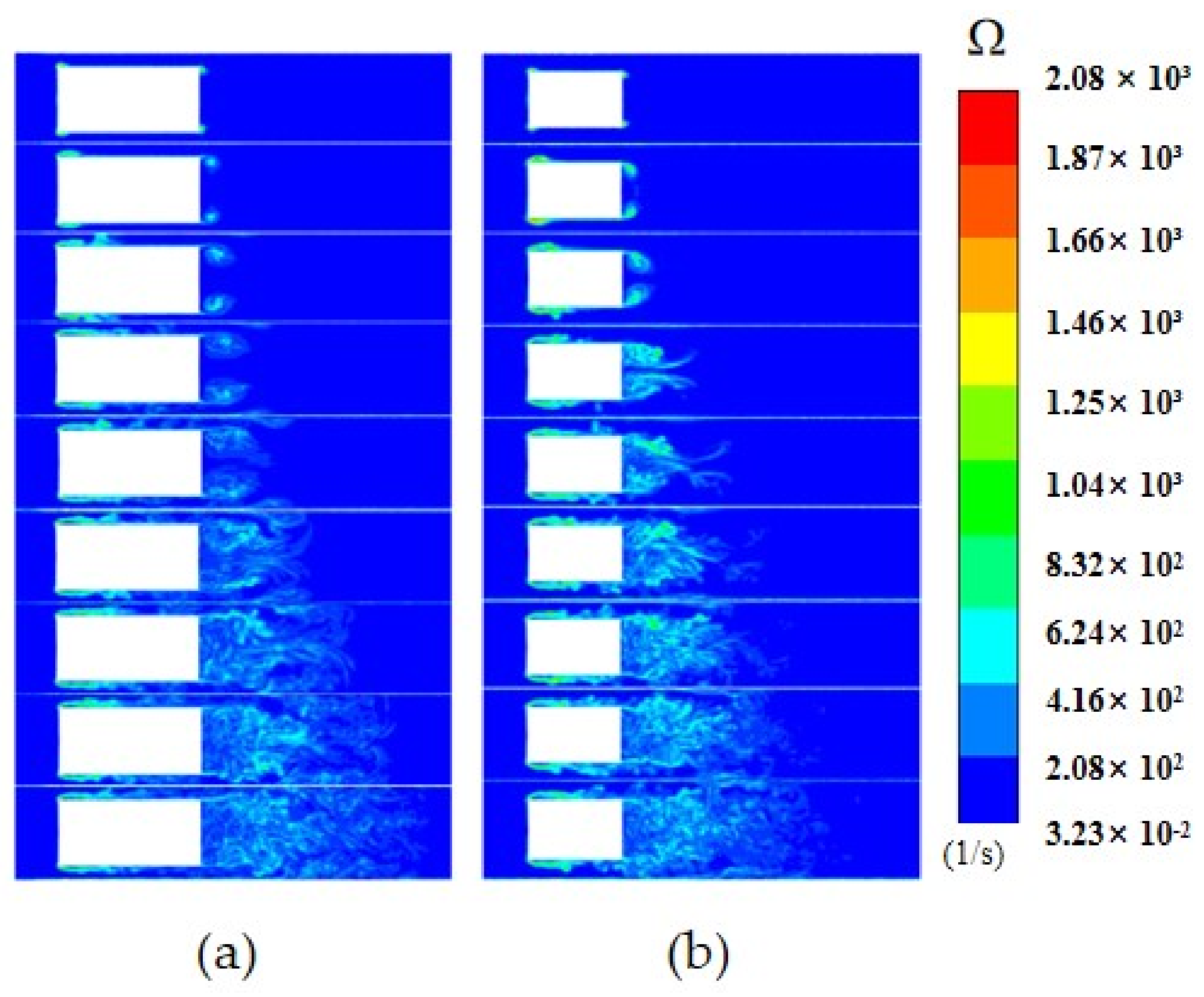
4.3. Vorticity Variation Characteristics
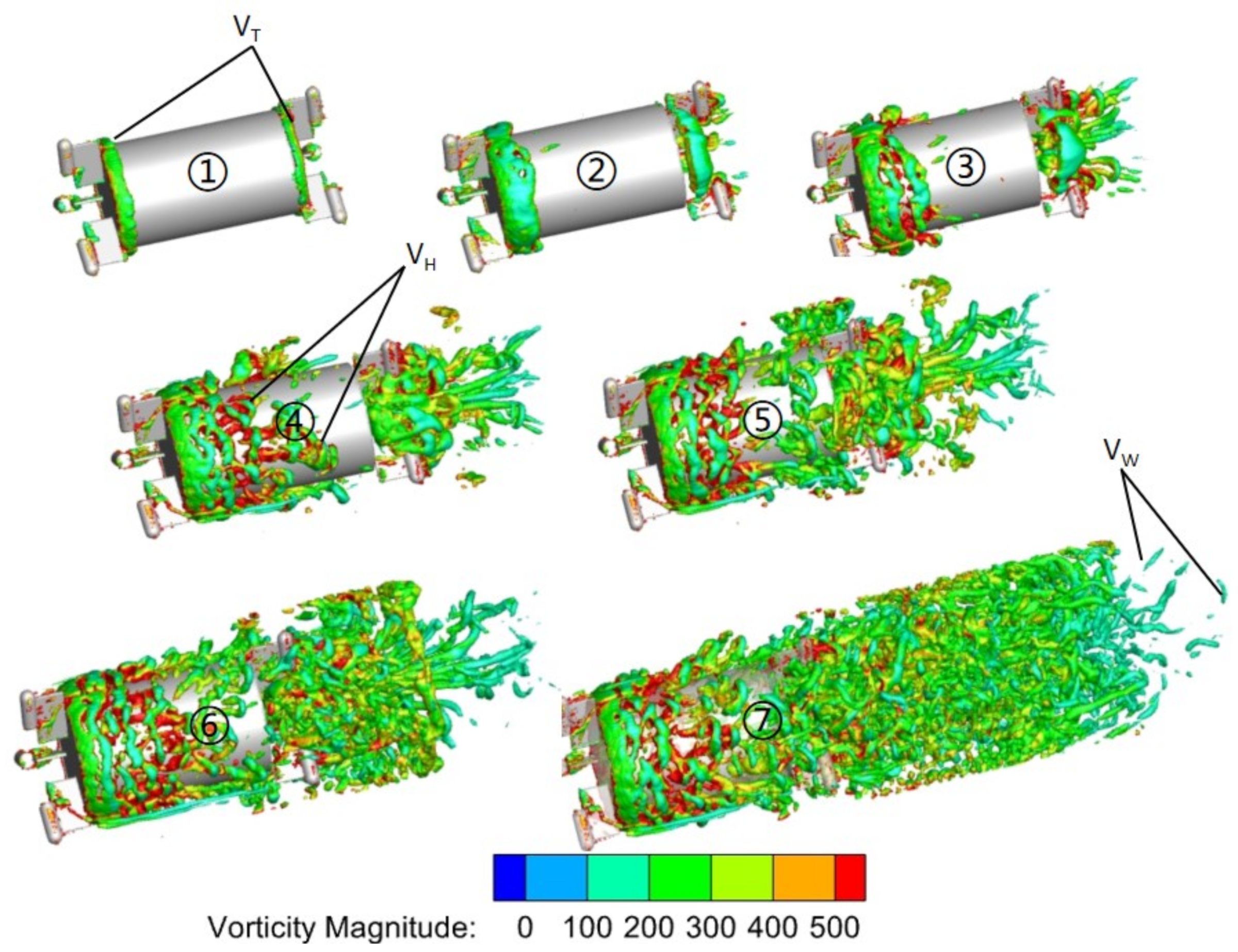
4.4. Vortex Structure Characteristics
4.5. Vortex Formation Length
5. Conclusions
- (1)
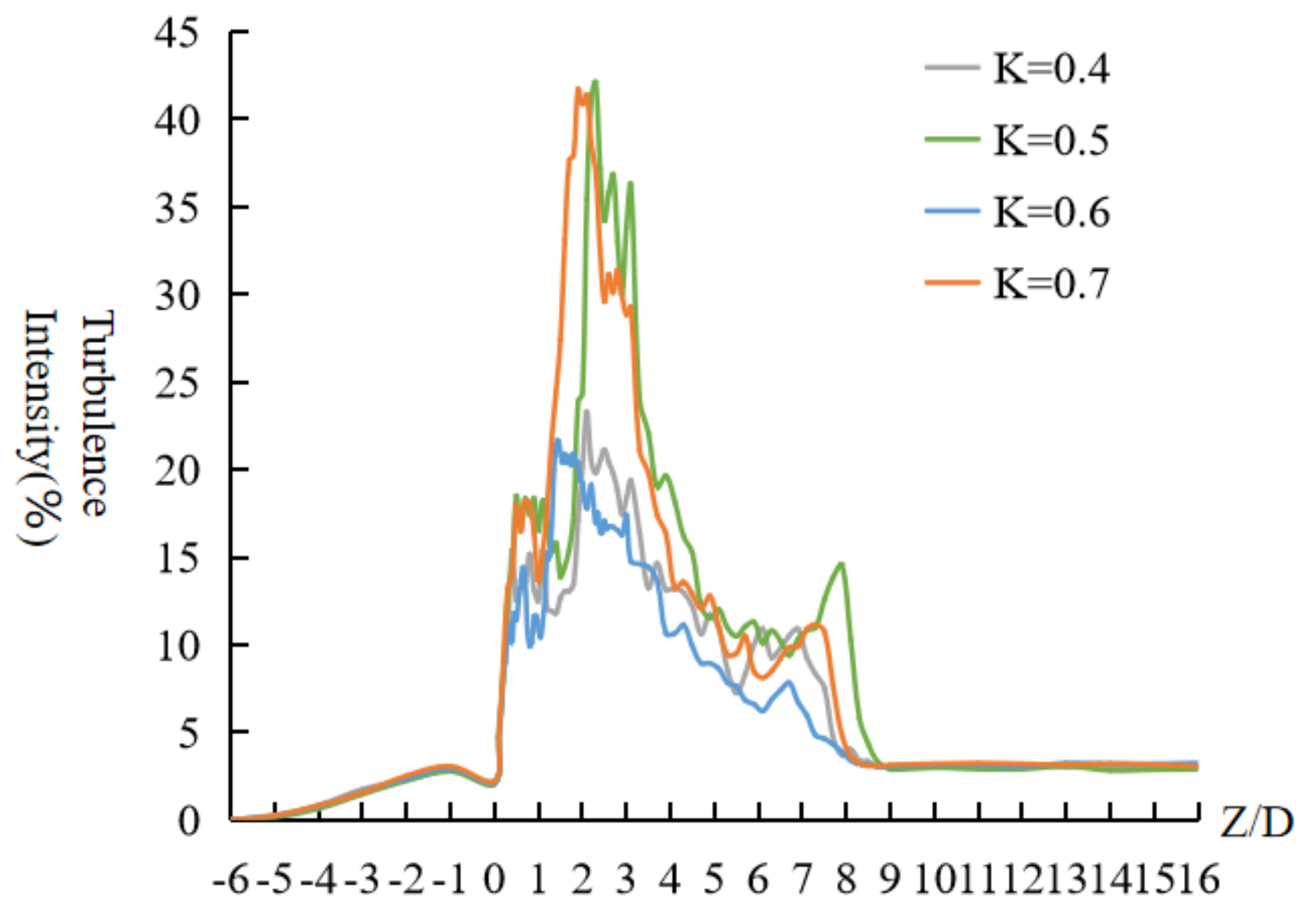
- The influences of the cylinder diameter on the gap flow velocity, the backflow area length, and the turbulence intensity were greater than those of the cylinder length. When the cylinder length was constant, the gap flow velocity, the backflow area length, and the turbulence intensity were proportional to the diameter-to-length ratio.
- (2)
- The effect of the diameter-to-length ratio on vortex formation length in the rear flow was greater than that in the gap flow. The presence of a piped vehicle made the original pipe turbulence disturbed, and the disturbance range extended to about a 7.5 D distance from the rear end.
- (3)
- A variety of vortex structures existed in the gap flow and rear flow areas. At the beginning of vortex development, ring vortices were generated at the front and rear ends of the cylinder body, so the vorticity appeared at these two locations first. Immediately afterward, the front ring vortex thickened and fell off along the cylinder body, and evolved into hairpin vortices with larger values of vorticity attached near the cylinder body. At the same time, a reflux vortex was formed after the rear ring vortex broke away from the cylinder body, and three groups of cross-twisted wake vortices were generated behind the three rear supports. Finally, some worm vortices were dispersed from the wake vortices.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xingji, D.; Fusheng, N.; Rongmin, L. Two models for friction loss in slurry pipeline transport. J. Hohai Univ. Chang. 2005, 19, 54–56. [Google Scholar]
- Xiaoning, B.; Shougen, H.; Daofang, Z.; Hongbo, Q. Advances and applications of solid-liquid two-phase flow in pipeline hydrotransport. J. Hydrodyn. 2001, 16, 303–311. [Google Scholar]
- Guangwen, C.; Desheng, G. Exploration of drag losses calculation in slurry horizontal pipeline transportation. J. Cent. South Inst. Min. Metall. 1994, 25, 162–166. [Google Scholar]
- Guangwen, C. Analysis on flowing model and drag lost of slurry pipeline transportation. Nonferrous Met. 1994, 46, 15–19. [Google Scholar]
- Haiwei, X. Investigation on Flow Properties and Resistance Properties of Condensed Wet Fly Ash in Pipeline; North China Electric Power University: Beijing, China, 2004. [Google Scholar]
- Liu, H.; Marrero, T.R. Coal log pipeline technology: An overview. Power Technol. 1997, 93, 217–222. [Google Scholar] [CrossRef]
- Gunnink, B.; Wei, L. Optimal moisture for rapid compaction of coal logs for freight pipelines. Power Technol. 2000, 107, 273–281. [Google Scholar] [CrossRef]
- Xiaodong, Z.; Lisheng, W.; Ke, Z.; Qingfu, Y.; Yuanzong, L. Dynamic characteristics of pipeline transport of coal logs. Hydraul. Coal Min. Pipeline Transp. 2003, 3, 9–12. [Google Scholar]
- Ke, Z.; Xiaodong, Z. The experiment of the pressure distribution on the Coal log surface in constant flow in pipe. Shanxi Coal 2003, 23, 16–18. [Google Scholar]
- Yu, L. Hydraulic mechanics of coal log transportation in pipeline. J. South. Inst. Metall. 1997, 18, 18–23. [Google Scholar]
- Wenjuan, L.; Shengyong, L.; Rupei, W.; Xiaodong, L.; Jianhua, Y. Study on the design of the coal log pipeline transportation experimental system. Chin. J. Eng. Des. 2015, 22, 596–601. [Google Scholar]
- Bagegni, A.H.; Adams, G.E.; Hof, R.G. Tubular linear induction motor for hydraulic capsule pipeline. I. Finite element analysis. IEEE Trans Energy Convers. 1993, 8, 251–256. [Google Scholar] [CrossRef]
- Bagegni, A.H.; Adams, G.E.; Hof, R.G. Tubular linear induction motor for hydraulic capsule pipeline. II. Finite element method(FEM) maximum thrust design. IEEE Trans Energy Convers. 1993, 8, 257–262. [Google Scholar] [CrossRef]
- Ulusarlan, D.; Teke, I. An experimental investigation of capsule velocity, concentration rate and the spacing between the capsule for spherical capsule train flow in a horizontal circular pipe. Power Technol. 2005, 159, 27–34. [Google Scholar] [CrossRef]
- Xihuan, S.; Yongye, L.; Qingfu, Y. Experimental study on starting conditions of the hydraulic transportation on the piped carriage. In Proceedings of the 20th National Conference on Hydrodynamics, Taiyuan, China, 23–25 August 2007. [Google Scholar]
- Rui, W.; Xihuan, S.; Yongye, L. Transportation characteristics of piped carriage with different Reynolds numbers. J. Drain. Irrig. Mach. Eng. 2011, 29, 343–347. [Google Scholar]
- Yongye, L.; Fei, L.; Rui, W. Hydraulic characteristics of transportation of different piped carriages in pipe. J. Drain. Irrig. Mach. Eng. 2010, 28, 174–178. [Google Scholar]
- Yongye, L.; Xihuan, S.; Xuelan, Z. Study of the energy consumption of the piped vehicle hydraulic transportation. Adv. Mech. Eng. 2019, 11, 1–12. [Google Scholar]
- Zeguang, C. Analysis of vibration characteristics of Marine hydraulic pipeline system. Technol. Innov. Appl. 2017, 24, 185–186. [Google Scholar]
- Lingxiao, Q.; Shichao, C.; Changhong, G.; Haihai, G.; Meng, G. Axial vibration characteristics of fluid-structure interaction of an aircraft hydraulic pipe based on modified friction coupling model. Appl. Sci. 2020, 10, 3548. [Google Scholar] [CrossRef]
- Fei, G.; Sonlin, N.; Hui, J.; Ruidong, H.; Fanglong, Y.; Xiaopeng, Y. Pipeline vibration control using magnetorheological damping clamps under Fuzzy–PID control algorithm. Micromachines 2022, 13, 531. [Google Scholar] [CrossRef]
- Khudayarov, B.; Turaev, F. Numerical simulation of a viscoelastic pipeline vibration under pulsating fluid flow. Multidiscip. Model. Mater. Struct. 2022, 18, 219–237. [Google Scholar] [CrossRef]
- Peixin, G.; Tao, Y.; Yuanlin, Z.; Jiao, W.; Jingyu, Z. Vibration analysis and control technologies of hydraulic pipeline system in aircraft: A review. Chin. J. Aeronaut. 2021, 34, 83–114. [Google Scholar]
- Chunjin, Z.; Xueqin, Z.; Min, Z.; Yongye, L.; Xihuan, S. Simulation analysis of hydraulic characteristics of pipeline vehicle vibration migration based on Fluent. J. Vib. Shock 2021, 40, 70–75. [Google Scholar]
- Chunjin, Z.; Xihuan, S.; Yongye, L.; Xueqin, Z. Numerical simulation and tests for vibration migration hydraulic characteristics of a piped carriage based on fluid-structure interaction. J. Vib. Shock 2019, 38, 251–258. [Google Scholar]
- Xiaoni, Y.; Juanjuan, M.; Yongye, L.; Xihuan, S.; Yongye, L.; Yonggang, L. Wall stresses in cylinder of stationary piped carriage using COMSOL multiphysics. Water 2019, 11, 1910. [Google Scholar] [CrossRef] [Green Version]
- Xiaomeng, J.; Xihuan, S.; Jiaorong, S. Effect of concentric annular gap flow on wall shear stress of stationary cylinder pipe vehicle under different Reynolds numbers. Math. Probl. Eng. 2020, 2020, 1253652. [Google Scholar]
- Wu, J.Z.; Ma, H.Y.; Zhou, M.D. Vorticity and Vortex Dynamics; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Sirui, W.; Jianyi, Z.; Lei, L.; Zifeng, Y.; Xi, X.; Chen, F.; Yi, G.; Xunchen, L.; Xiao, H.; Chi, Z.; et al. Evolution characteristics of 3D vortex structures in stratified swirling flames studied by dual-plane stereoscopic PIV. Combust. Flame 2022, 237, 111874. [Google Scholar]
- Cristofano, L.; Nobili, M.; Caruso, G. Experimental study on unstable free surface vortices and gas entrainment onset condition. Exp. Therm. Fluid Sci. 2014, 42, 265–270. [Google Scholar] [CrossRef]
- Lei, W.; Zhenwei, M. Flow field and vorticity measurement of stepped spillway based on PIV. Water Resour. Power 2019, 37, 81–84. [Google Scholar]
- Sarkardeh, H.; Reza Zarrati, A.; Jabbari, E.; Marosi, M. Numerical simulation and analysis of flow in a reservoir in the presence of vortex. Eng. Appl. Comput. Fluid Mech. 2014, 8, 598–608. [Google Scholar] [CrossRef] [Green Version]
- Shengyang, P.; Zhenggui, L.; Xinrui, L.; Xin, C.; Deyou, L.; Yongzhi, Z.; Xiaobing, L.; Weijun, W. Flow analysis of tubular draft tube based on vortex analysis. Eng. J. Wuhan Univ. 2020, 53, 681–687. [Google Scholar]
- Longgang, S.; Pengcheng, G.; Xingqi, L. Visualization investigation into precessing vortex rope in Francis turbine draft tube based on several vortex identification criterions. Chin. J. Hydrodyn. 2019, 34, 779–787. [Google Scholar]
- Jinguo, H.; Yilun, S.; Tianmiao, W.; Lueth, T.C.; Jianhong, L.; Xingbang, Y. Fluid-structure interaction hydrodynamics analysis on a deformed bionic flipper with non-uniformly distributed stiffness. IEEE Robot. Autom. Lett. 2020, 5, 4657–4662. [Google Scholar]
- Chunyu, G.; Hang, G.; Jian, H. Large eddy simulation of flow characteristics around a Twisted cylinder. J. Harbin Eng. Univ. 2021, 42, 331–338. [Google Scholar]
- Zhiyuan, G.; Peixiang, Y.; Yanghua, O. Shear layer instability of flow around a circular cylinder based on Large Eddy Simulation. J. Shanghai Jiao Tong Univ. 2021, 55, 924–933. [Google Scholar]
- Zhicheng, X.; Jiarui, L.; Xiaoyu, Z.; Xi, Y. Effect of Reynolds number on vortex shedding under different flow modes. Res. Dev. Mach. Equip. 2020, 51, 97–101. [Google Scholar]
- Kai, K.; Ziliang, Z.; Weiqiang, W.; Mingming, Z.; Bo, W.; Guofu, W. Influence of computation domain size on large eddy simulation results. J. Aerosp. Power 2020, 35, 2440–2448. [Google Scholar]
- Smagorinsky, J. General Circulation Experiments with the Primitive Equations, Part 1, Basic Experiments. Mon. Weather Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Nicoud, F.; Ducros, F. Subgrid-scale stress based on the square of the velocity gradient tensor. Flow Turbul. Combust. 1999, 62, 183–200. [Google Scholar] [CrossRef]
- Ziqiang, Y. Study on Thermal Hydraulics of Helical Tube Steam Generator for Small Modular Reactor; Chongqing University: Chongqing, China, 2018. [Google Scholar]
- Joel, H.F.; Milovan, P.; Robert, L.S. Computational Method for Fluid Dynamics, 4th ed.; Springer: Berlin, Germany, 2020. [Google Scholar]
- Helmholtz, H. Über integrale der hydrodynamischen gleichungen, welche den wirbelbewegungen entsprechen. J. Für Die Reine Und Angew. Math. 1858, 55, 25–55. [Google Scholar]
- Chen, X.; Wenming, Z.; Yiliang, C. Large eddy simulation on the wake of the circular disk at a high Reynolds number. J. Univ. Sci. Technol. China 2019, 49, 930–939. [Google Scholar]
- Chaoqun, L. Liutex-third generation of vortex definition and identification methods. Acta Aerodyn. Sinica 2020, 38, 413–431. [Google Scholar]
- Bearman, P.W. Investigation of the flow behind a two-dimensional model with a blunt trailing edge and fitted with splitter plates. J. Fluid Mech. 1965, 21, 241–255. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| K | Total Number of Grids | Vorticity (1/s) | ||||
|---|---|---|---|---|---|---|
| 2.5 mm | 2 mm | 1.5 mm | 2.5 mm | 2 mm | 1.5 mm | |
| 0.4 | 15,083,139 | 30,102,897 | 58,471,317 | 421.895 | 455.026 | 453.876 |
| 0.5 | 14,952,093 | 29,831,097 | 58,194,097 | 394.284 | 438.463 | 436.998 |
| 0.6 | 15,200,257 | 30,340,955 | 58,949,370 | 297.387 | 331.485 | 334.275 |
| 0.7 | 15,133,129 | 30,158,341 | 58,606,148 | 374.473 | 398.799 | 390.648 |
| K | |
|---|---|
| 0.4 | 0.705 D |
| 0.5 | 0.895 D |
| 0.6 | 0.757 D |
| 0.7 | 0.901 D |
| K | 0.4 | 0.5 | 0.6 | 0.7 | ||||
|---|---|---|---|---|---|---|---|---|
| L | L | L | L | |||||
| Gap flow | 15.42 | 0.4 D | 18.49 | 0.5 D | 14.39 | 0.6 D | 18.01 | 0.5 D |
| Rear flow | 23.29 | 0.6 D | 42.11 | 0.8 D | 21.65 | 0.4 D | 41.71 | 0.9 D |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Sun, X.; Li, Y. Hydraulic Characteristics and Vortex Characteristics of the Flow around the Piped Vehicle with Different Diameter-to-Length Ratios. Water 2023, 15, 126. https://doi.org/10.3390/w15010126
Sun L, Sun X, Li Y. Hydraulic Characteristics and Vortex Characteristics of the Flow around the Piped Vehicle with Different Diameter-to-Length Ratios. Water. 2023; 15(1):126. https://doi.org/10.3390/w15010126
Chicago/Turabian StyleSun, Lei, Xihuan Sun, and Yongye Li. 2023. "Hydraulic Characteristics and Vortex Characteristics of the Flow around the Piped Vehicle with Different Diameter-to-Length Ratios" Water 15, no. 1: 126. https://doi.org/10.3390/w15010126
APA StyleSun, L., Sun, X., & Li, Y. (2023). Hydraulic Characteristics and Vortex Characteristics of the Flow around the Piped Vehicle with Different Diameter-to-Length Ratios. Water, 15(1), 126. https://doi.org/10.3390/w15010126