

Analysis of Wave Parameters on the Uprighting Process of a Grounded and Capsized Ship

 ,
,
Abstract
:1. Introduction
2. Theoretical Calculation
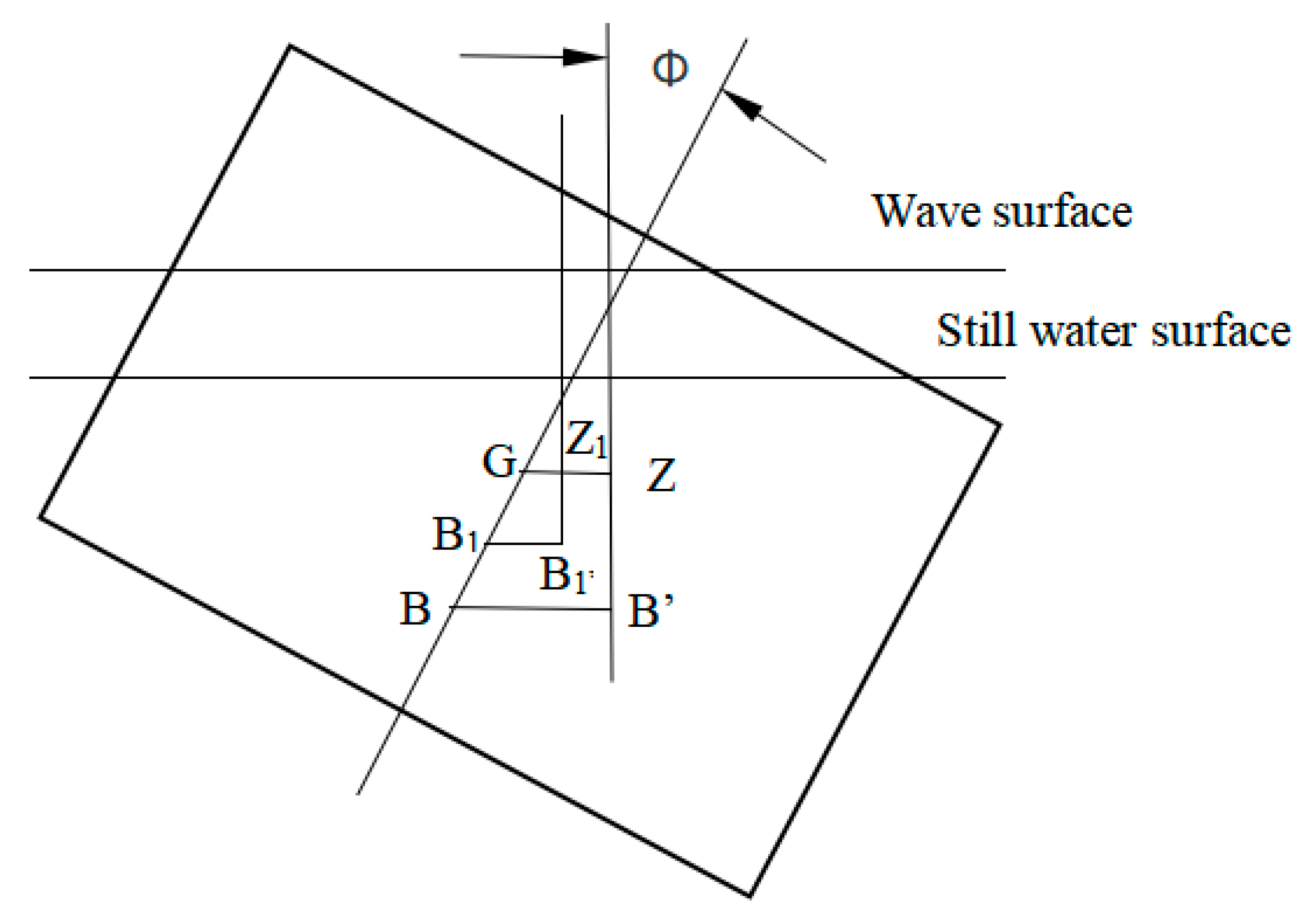
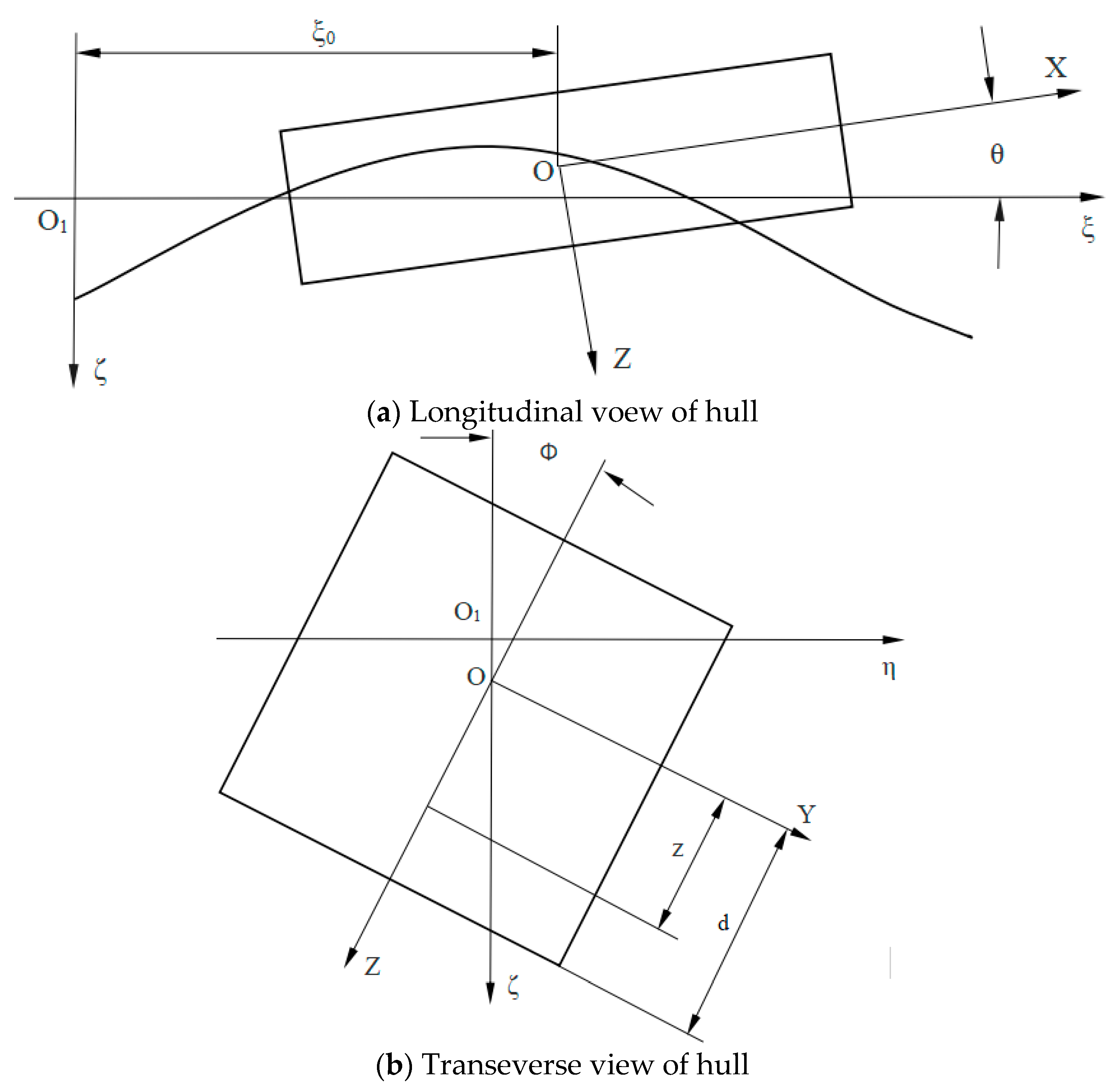
2.1. Wave force Calculation
2.2. Righting Force Calculation
3. Simulation Calculation
3.1. Simulation Calculation Method
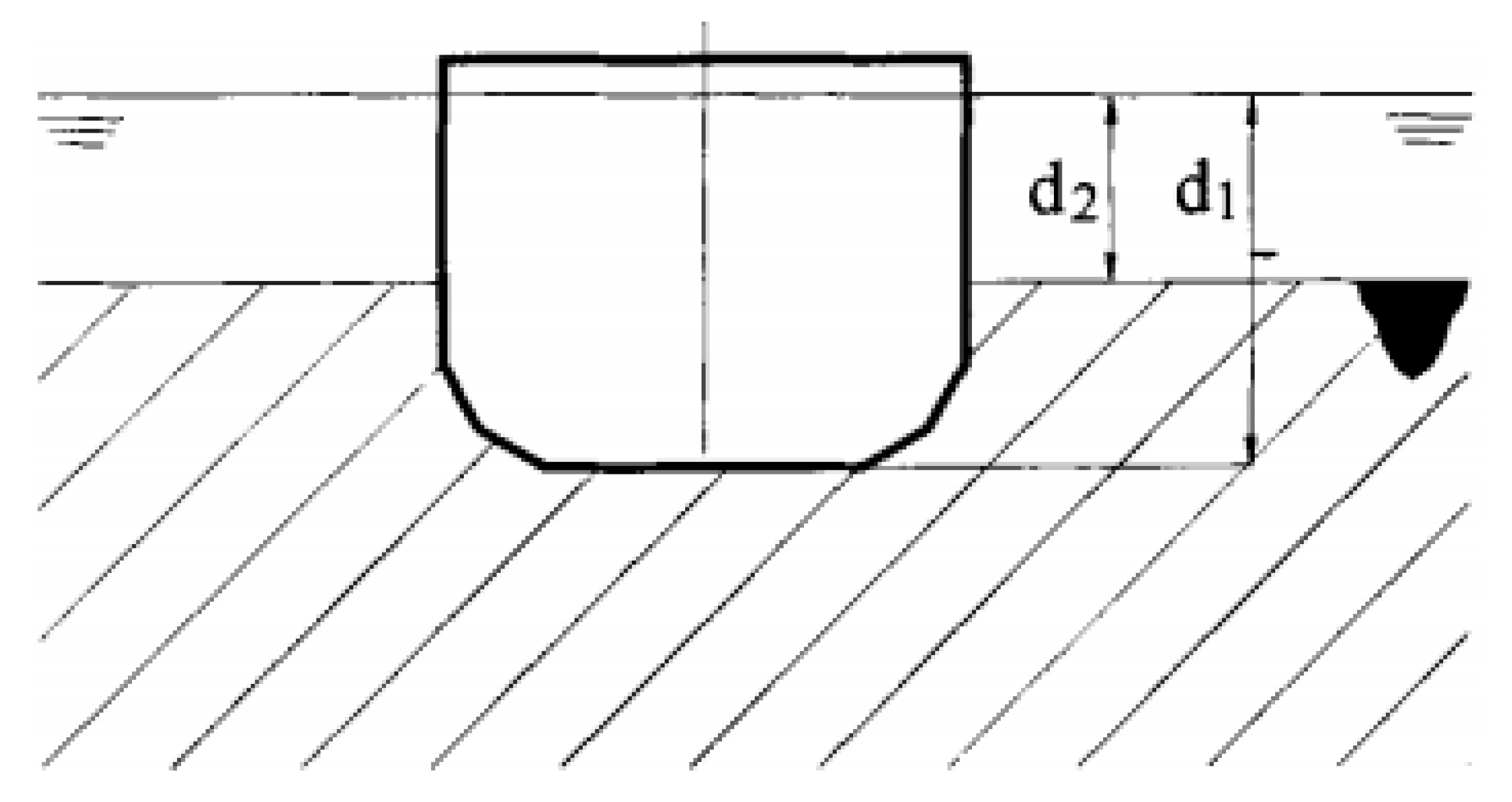
3.1.1. Ground Force
3.1.2. Wave Force Calculation
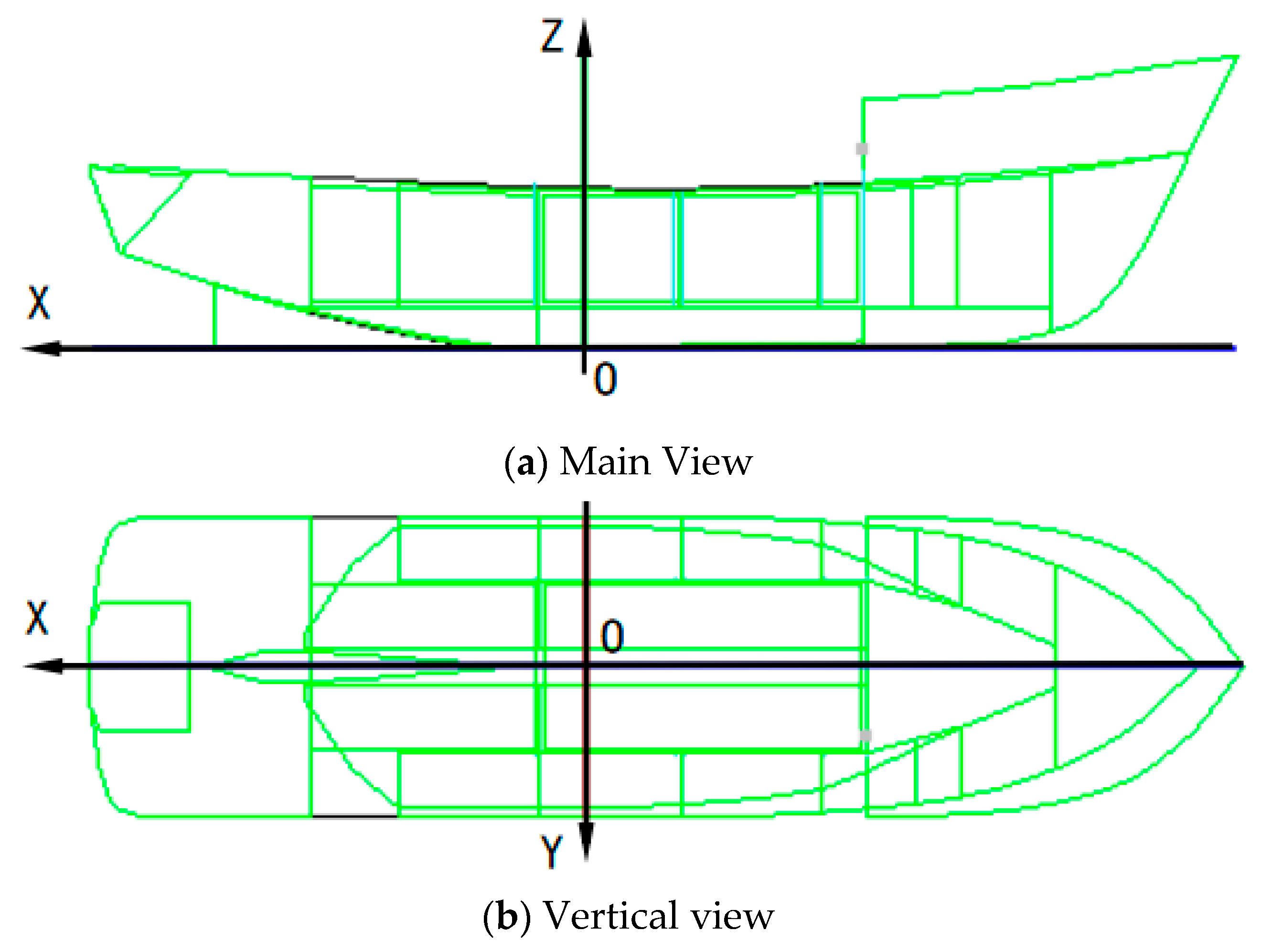
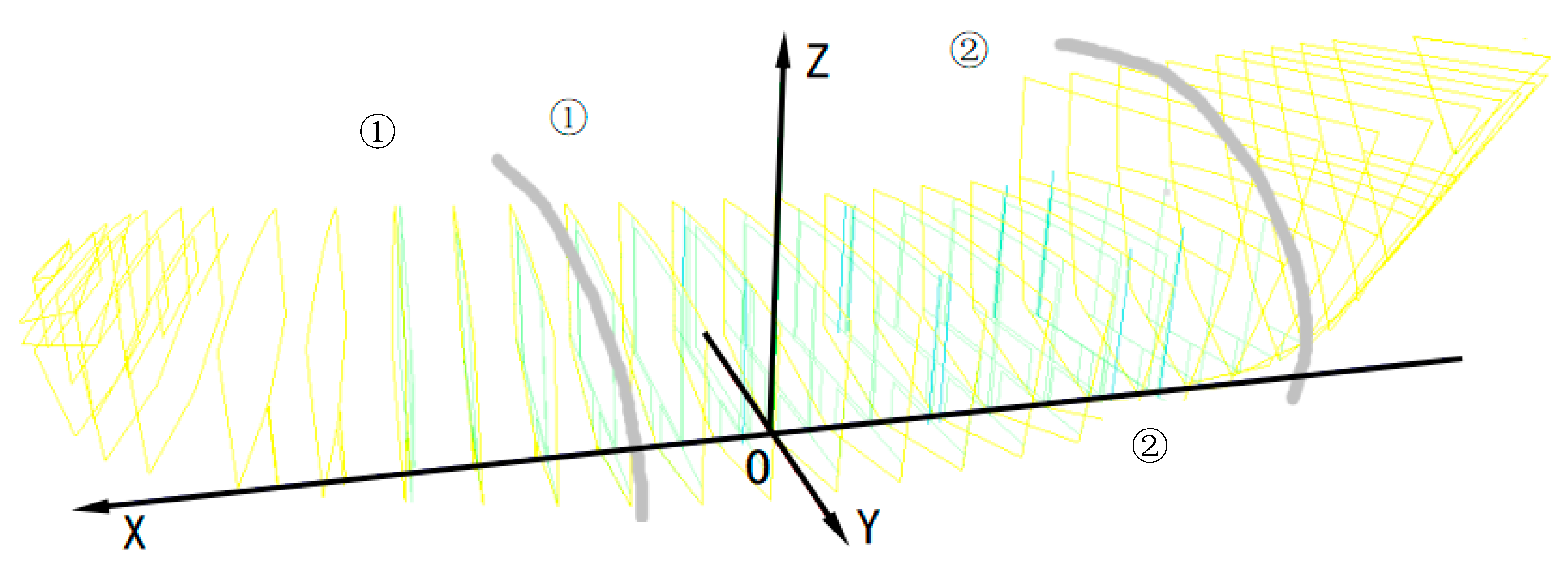
3.2. Establishment of the Ship Model
3.3. Simulation Scheme
4. Simulation Calculation and Analysis
4.1. The Effect of Phase Angle on the Uprighting Process
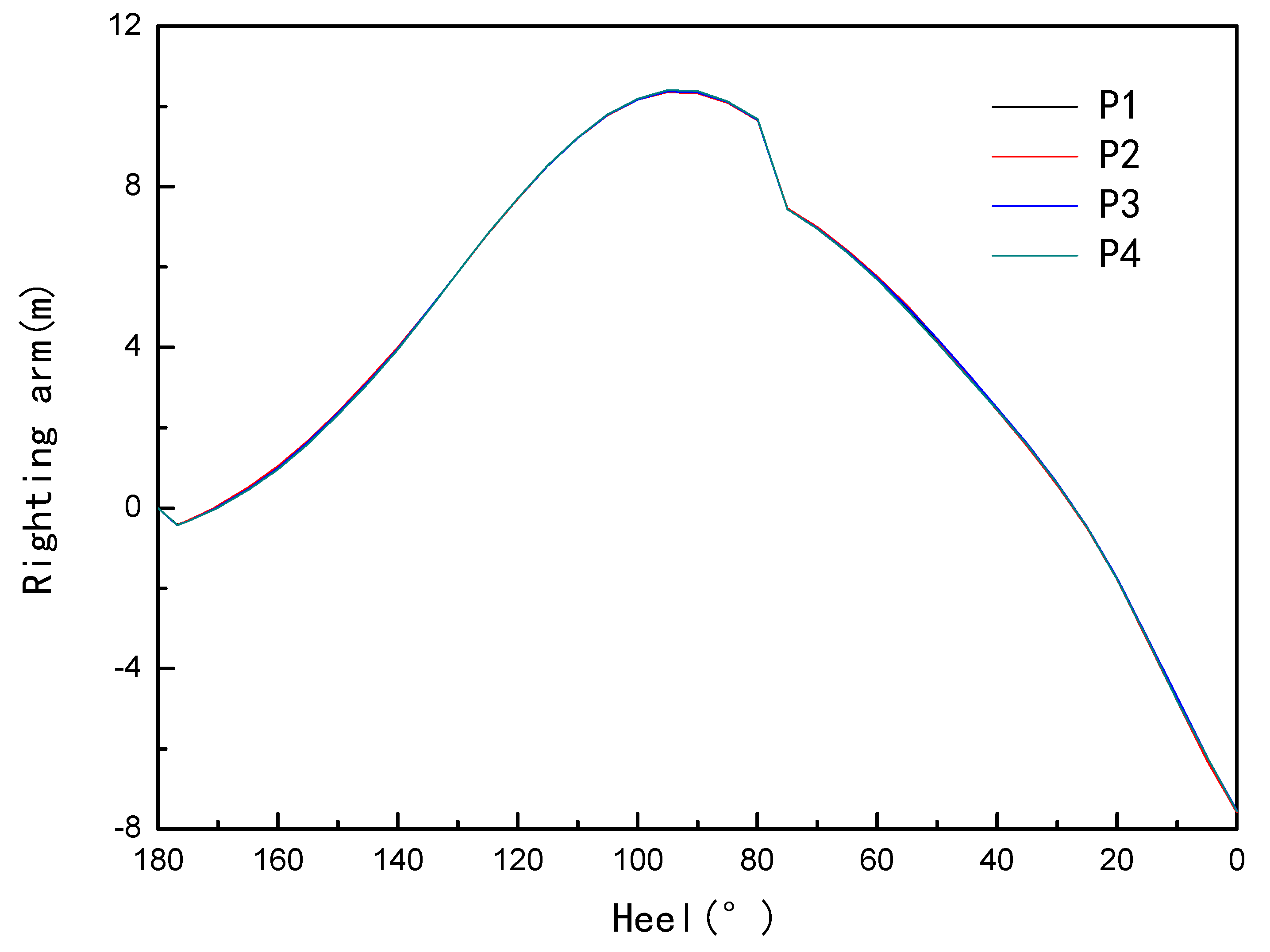
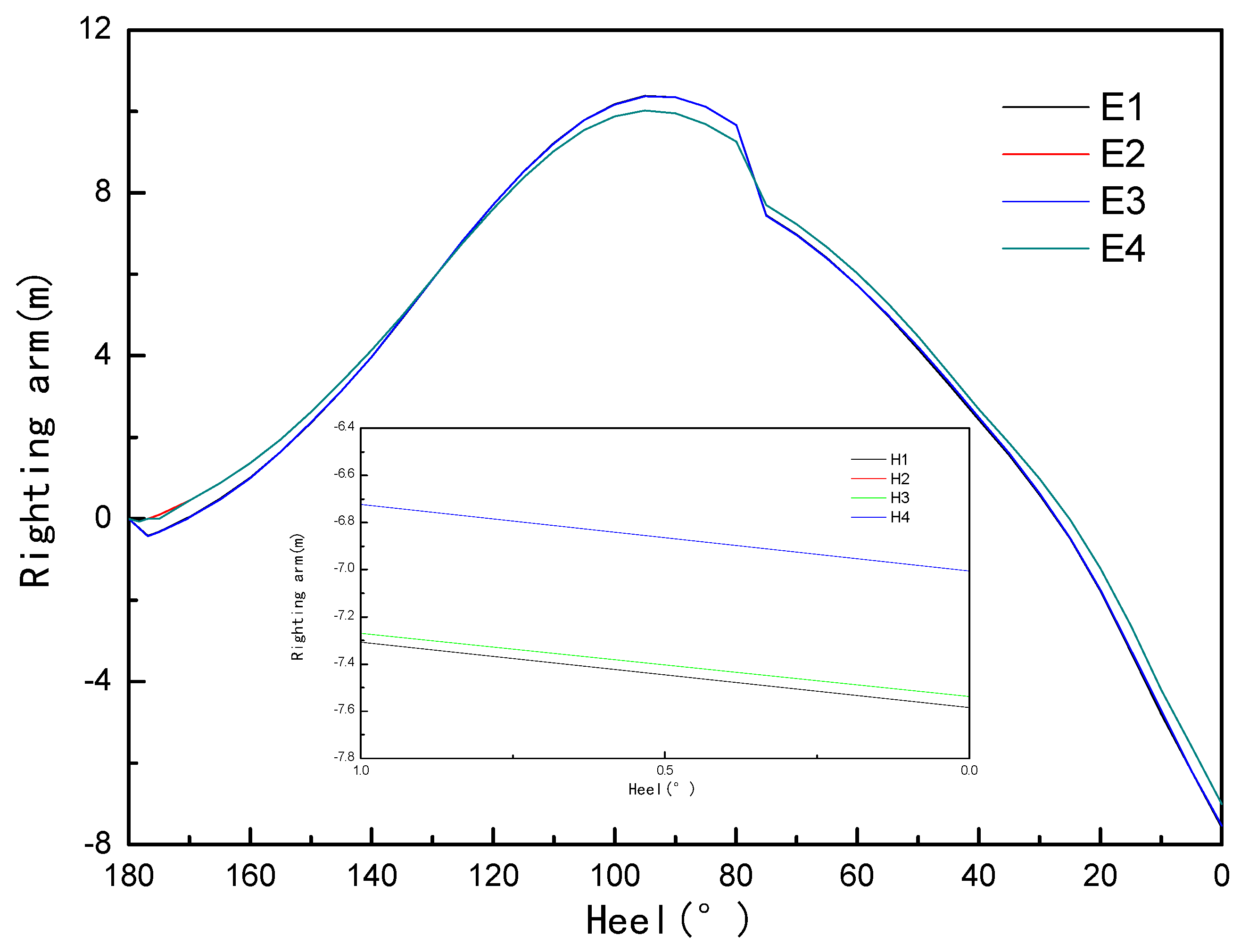
4.1.1. Righting Arm
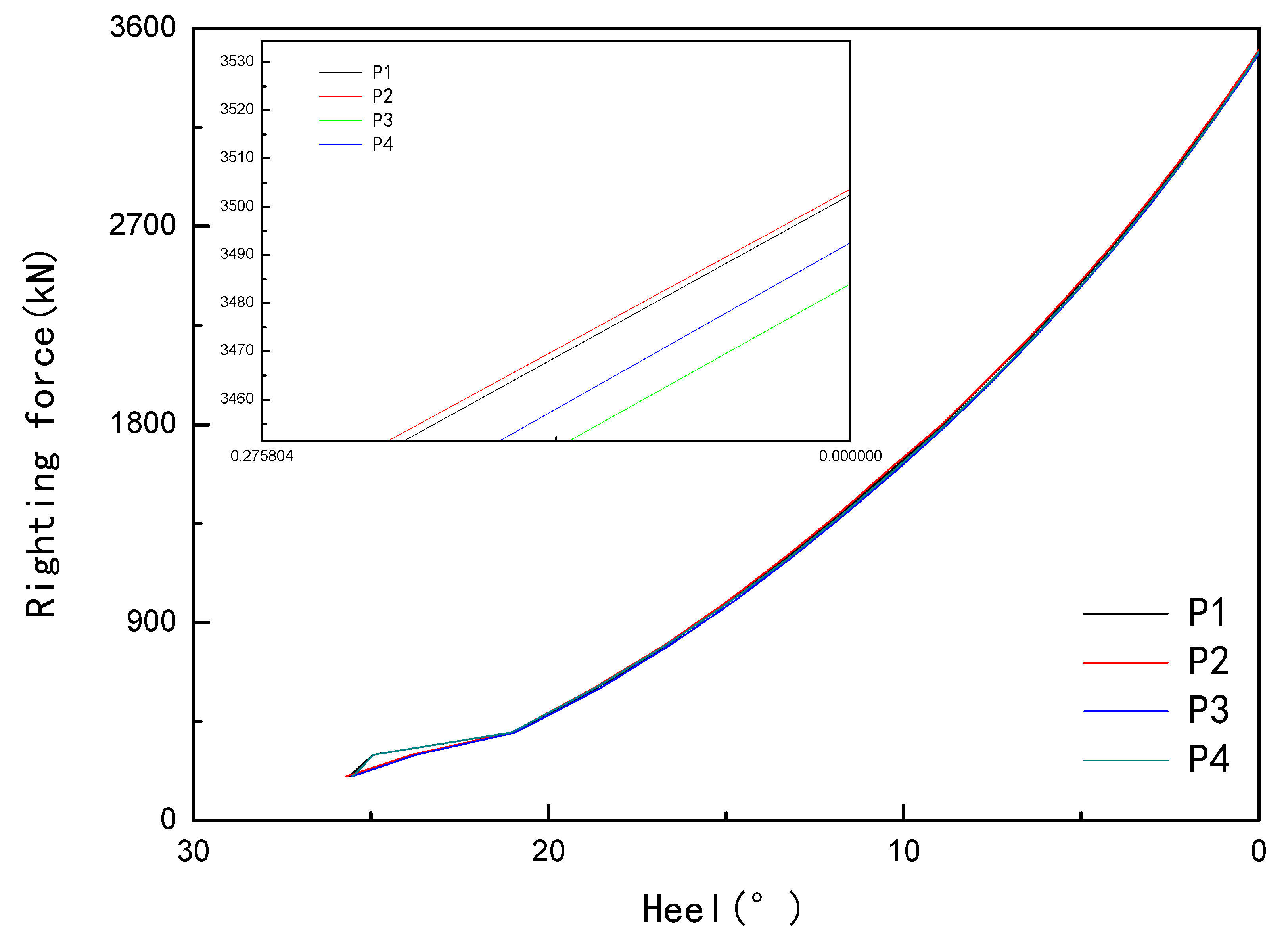
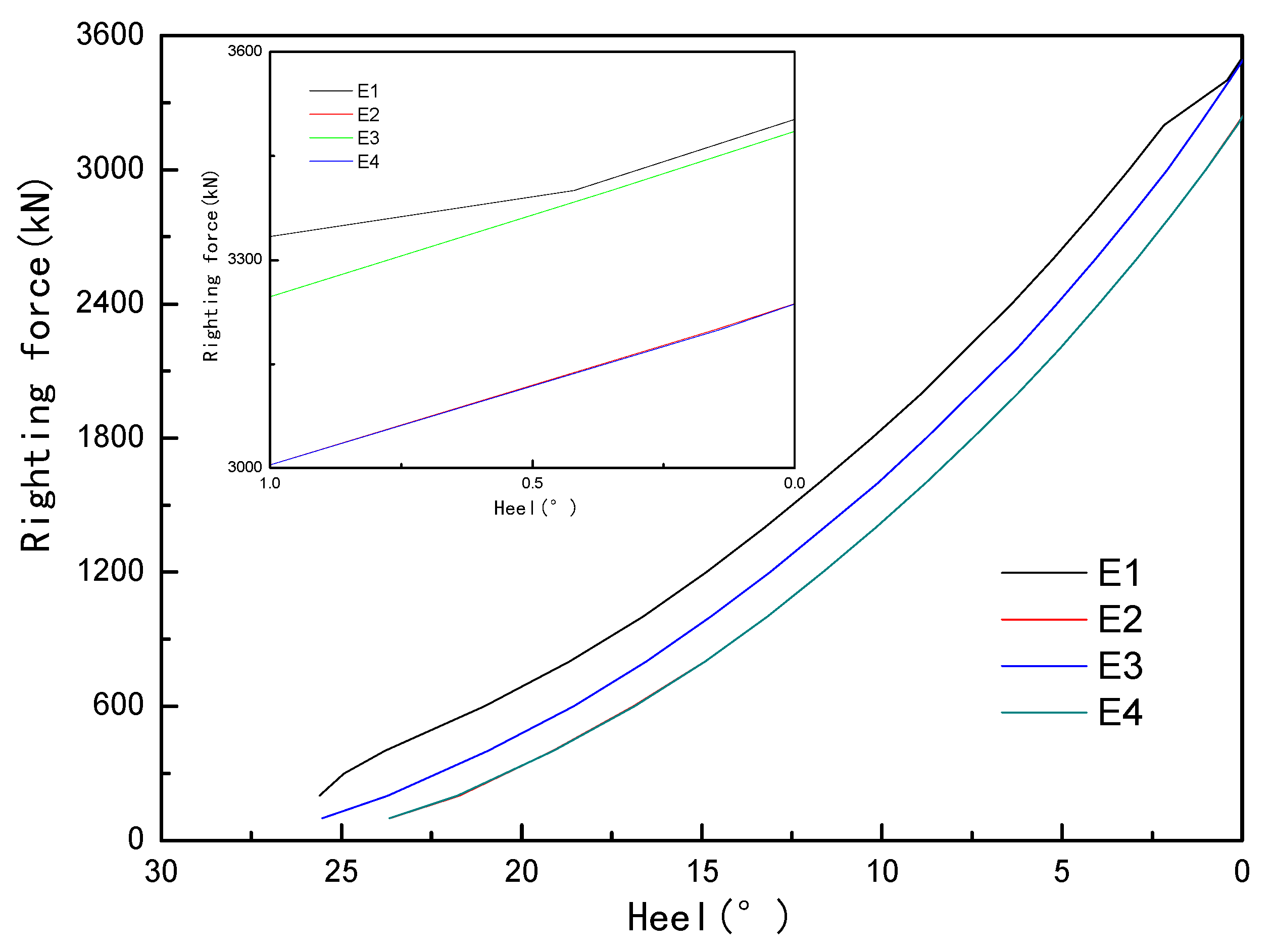
4.1.2. Righting Force
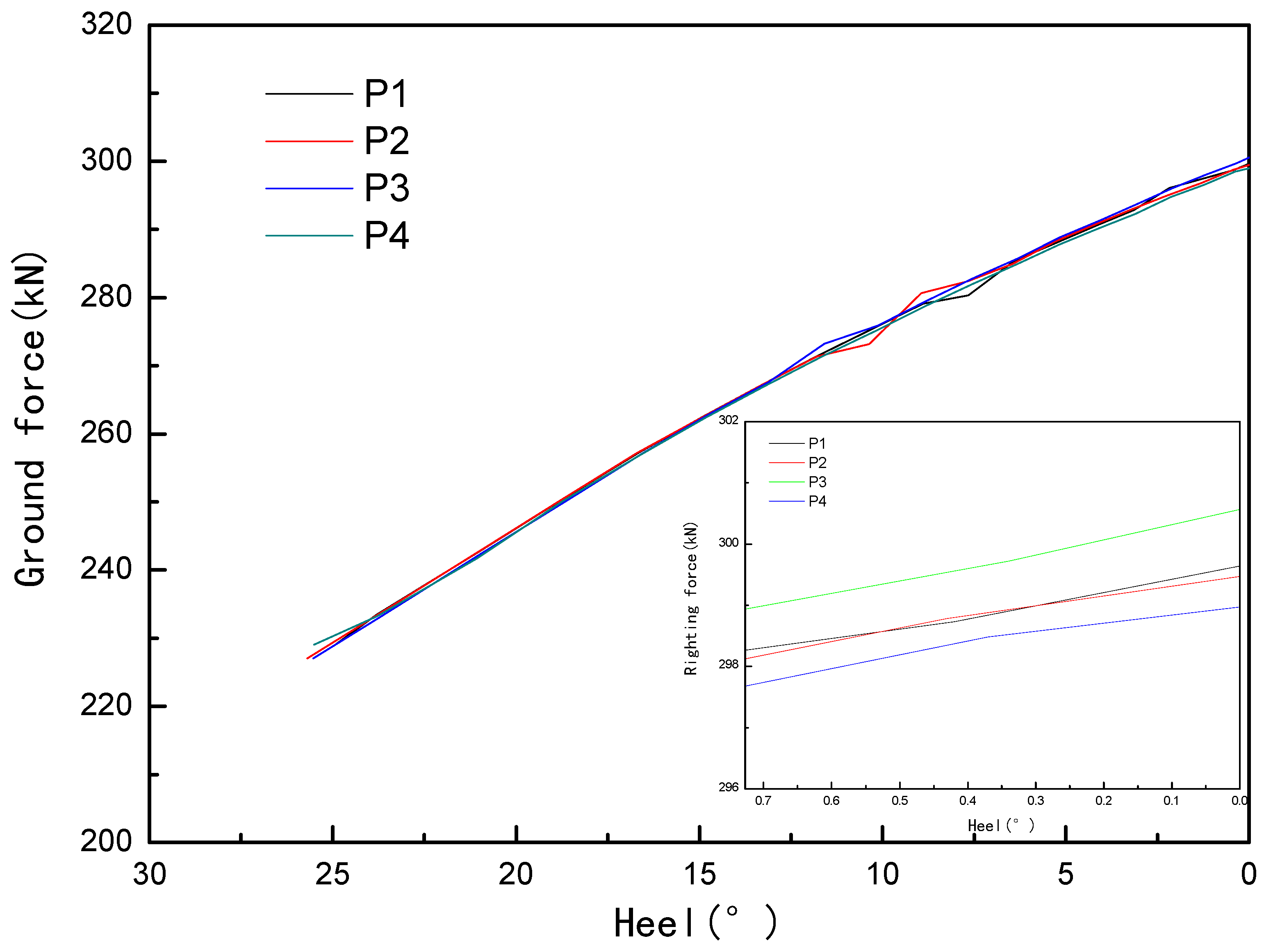
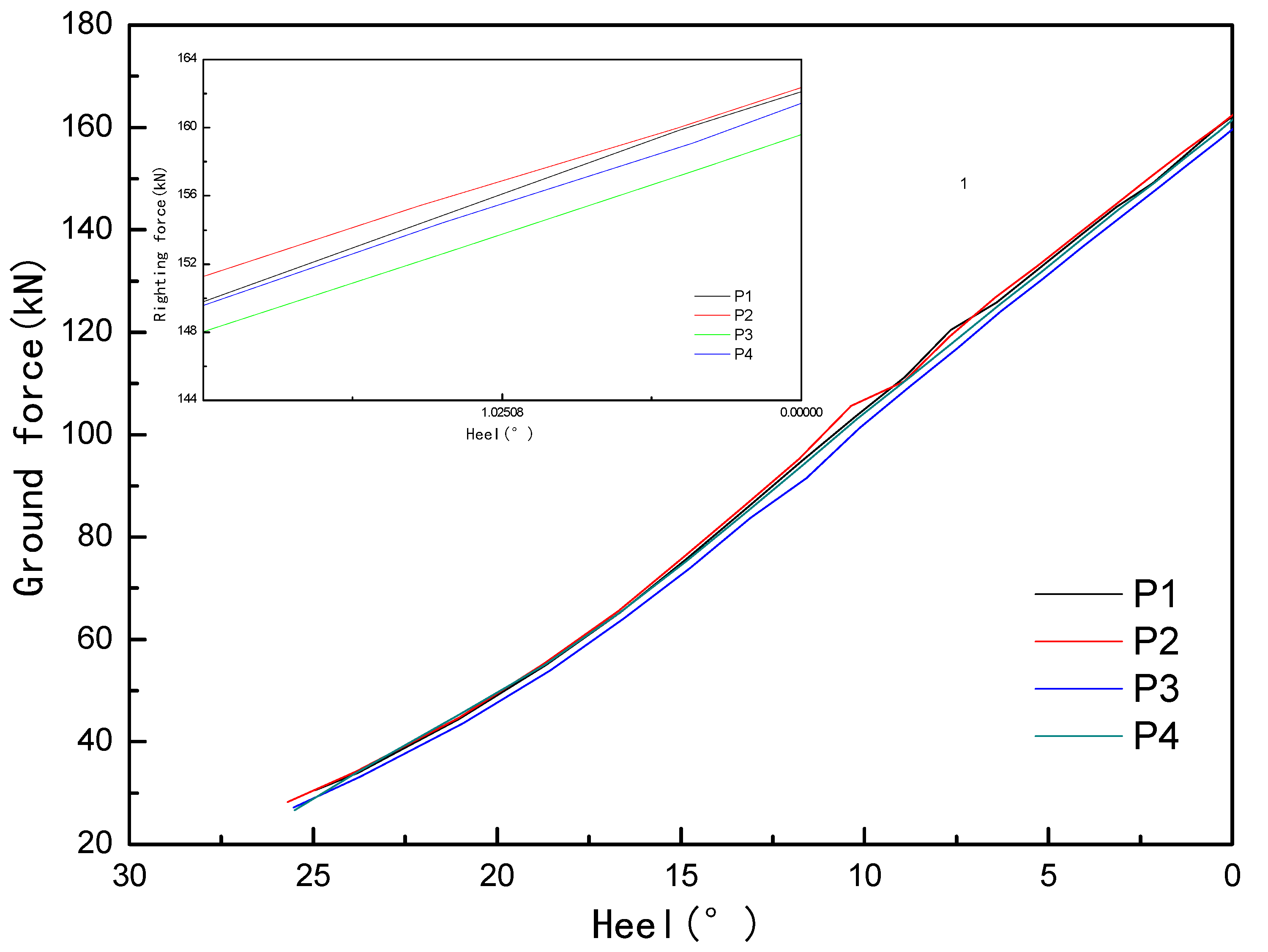
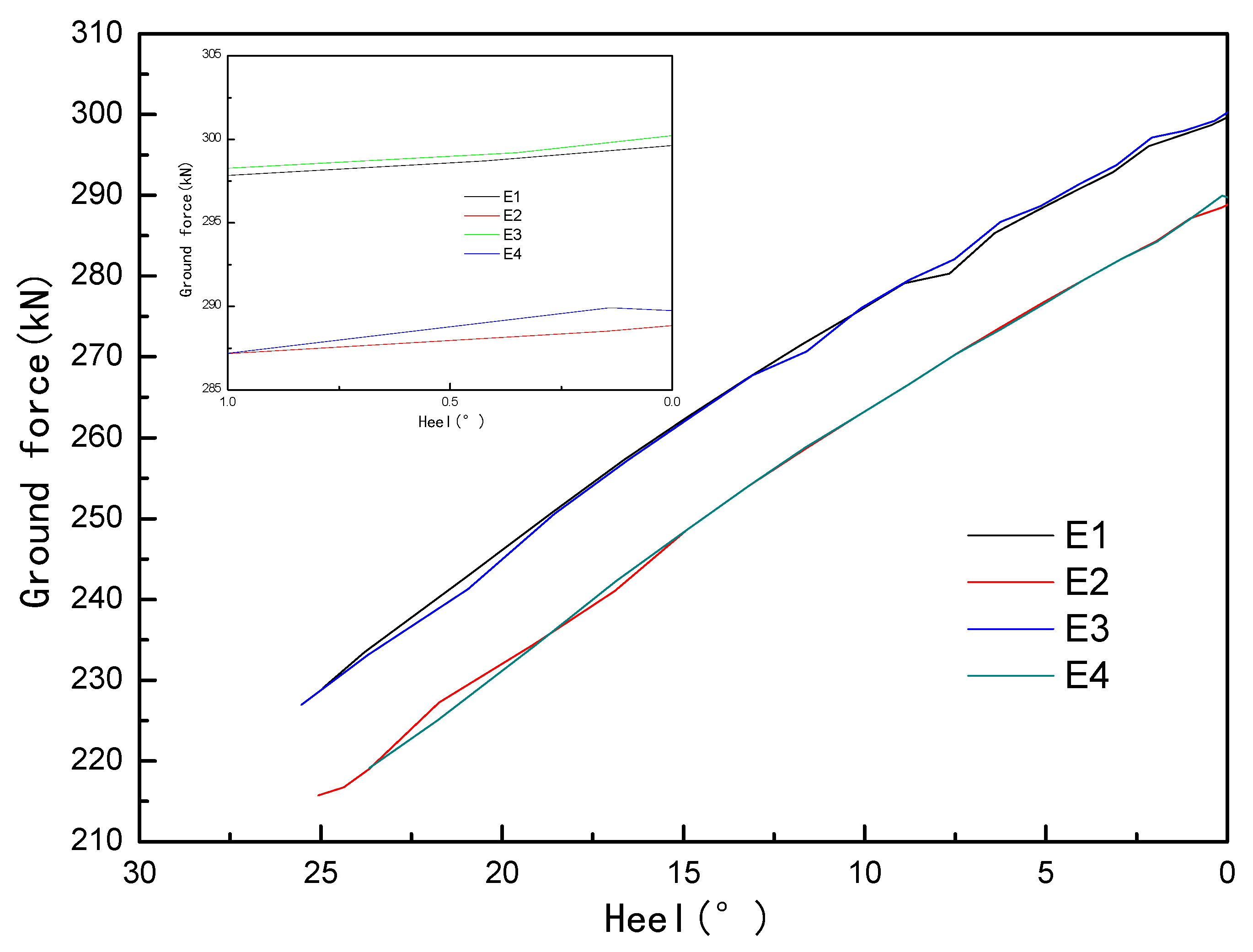
4.1.3. Ground Force
4.2. The Effect of Wavelength on the Uprighting Process
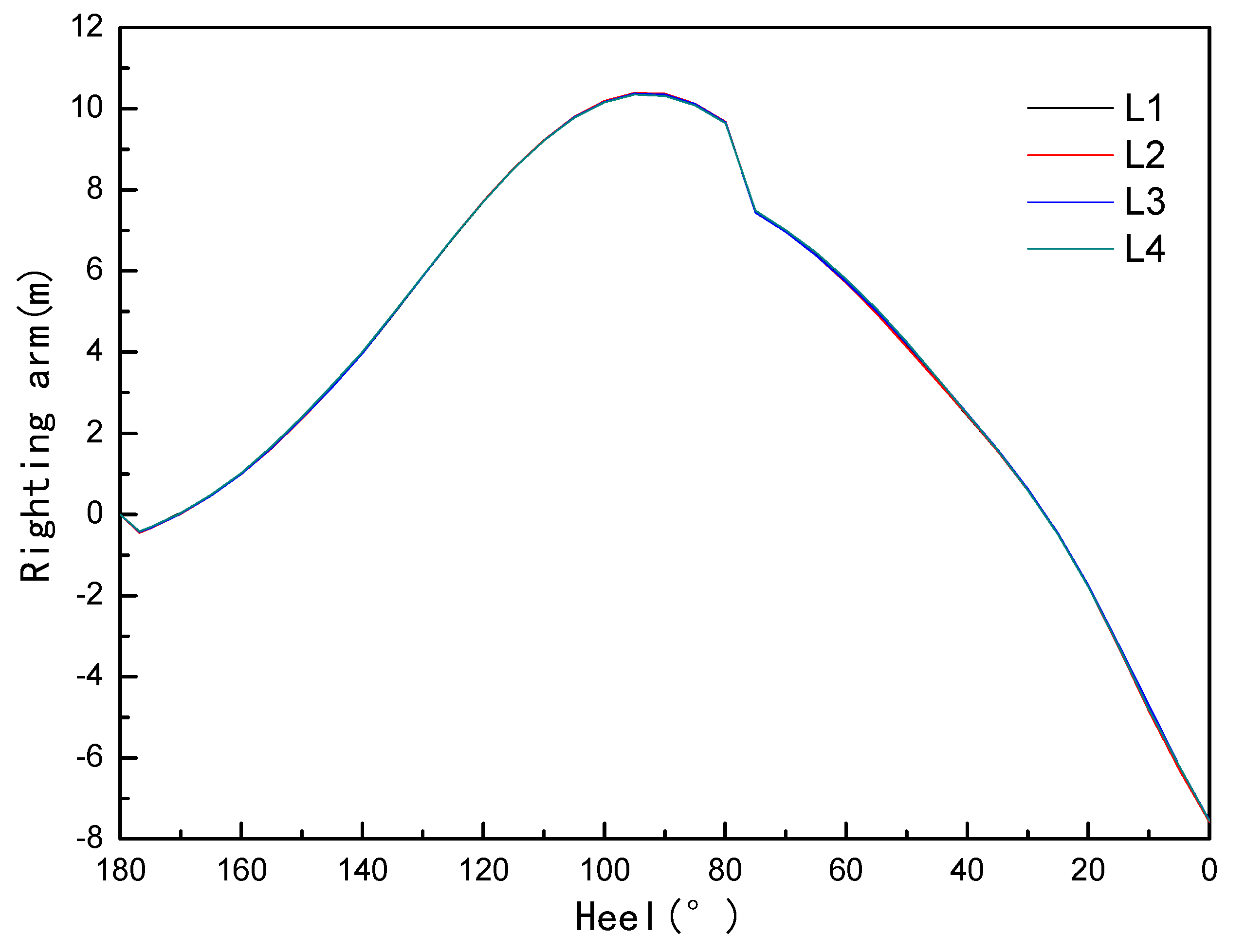
4.2.1. Righting Arm
4.2.2. Righting Force
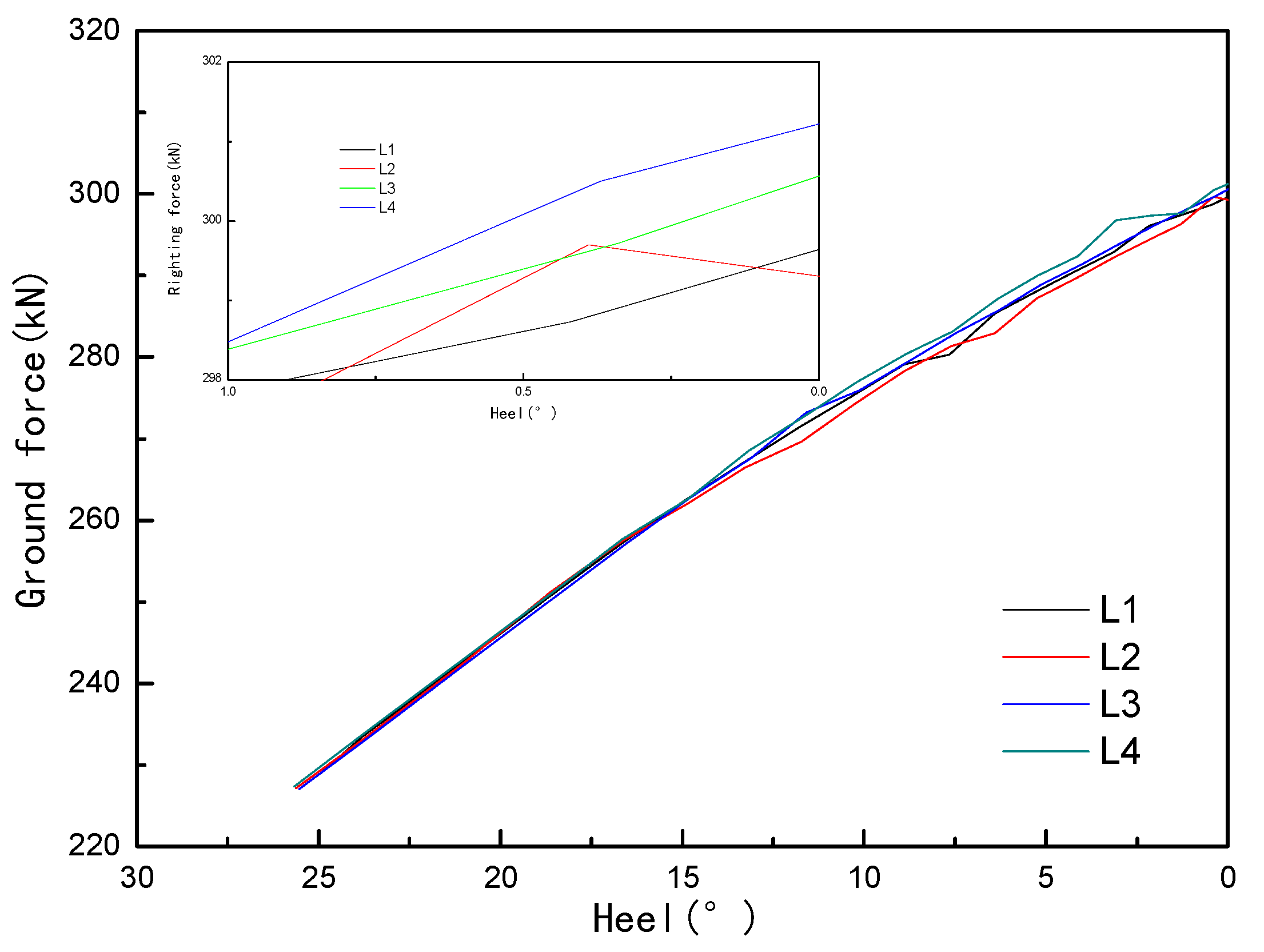
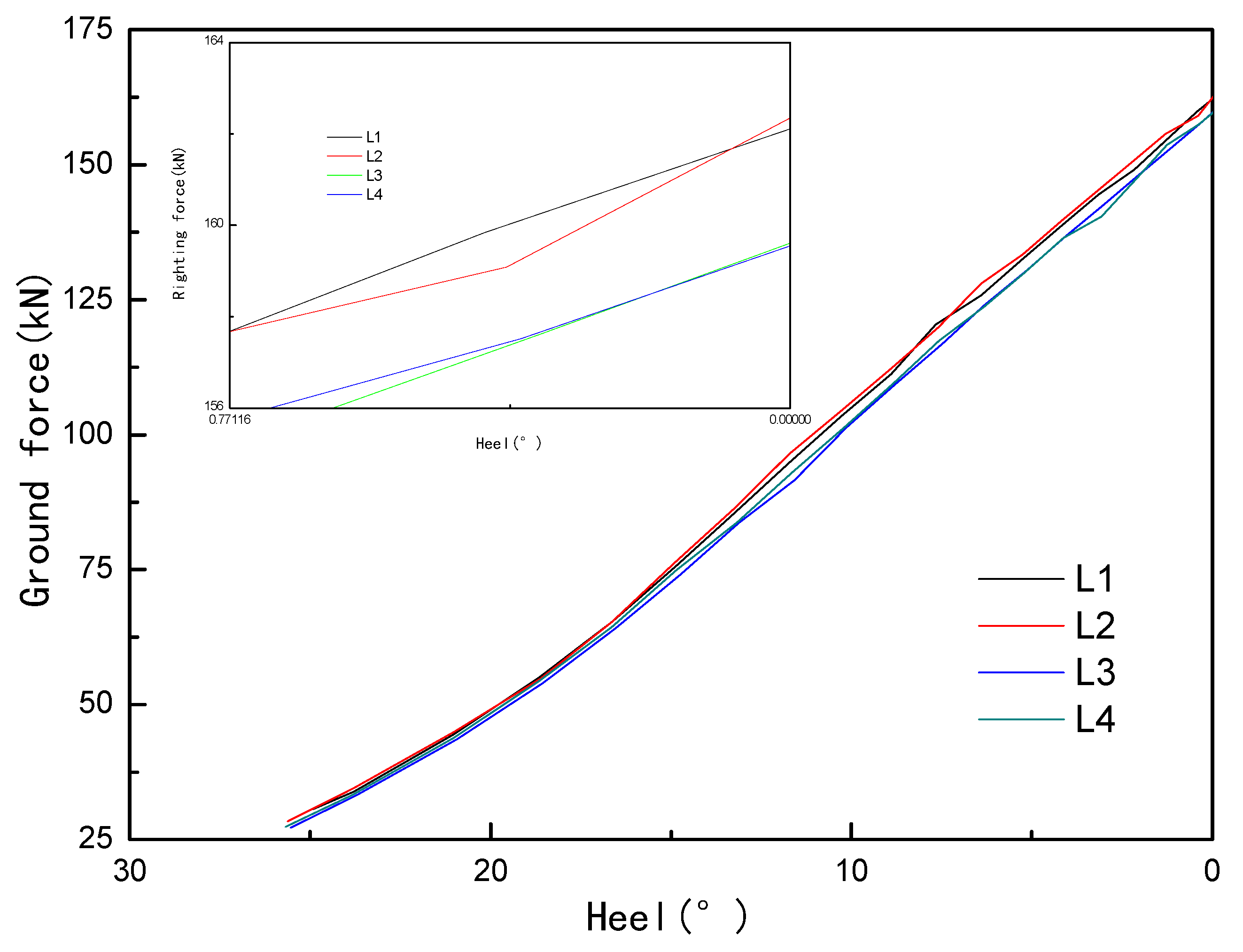
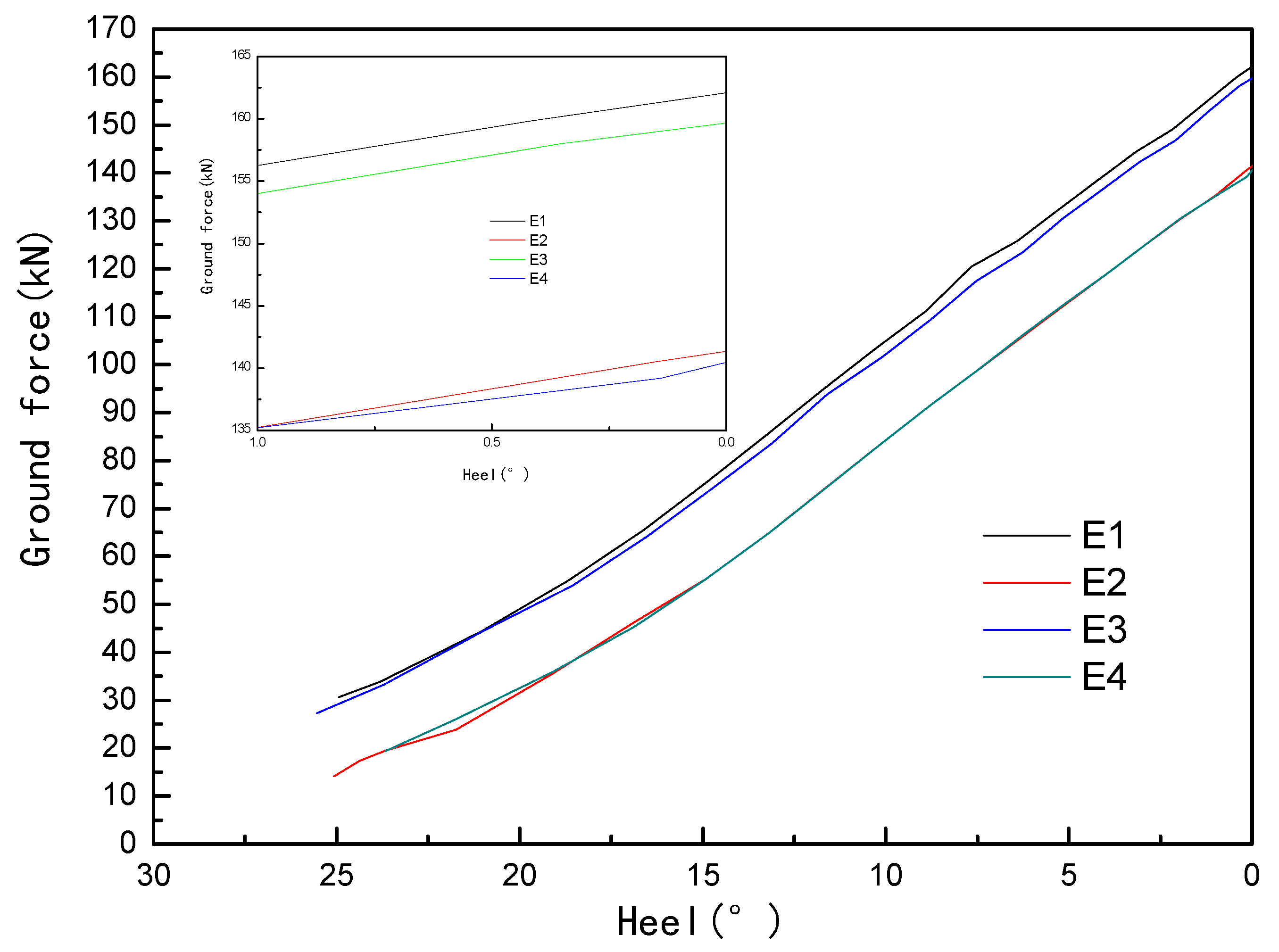
4.2.3. Ground Force
4.3. The Effect of Wave Height on the Uprighting Process
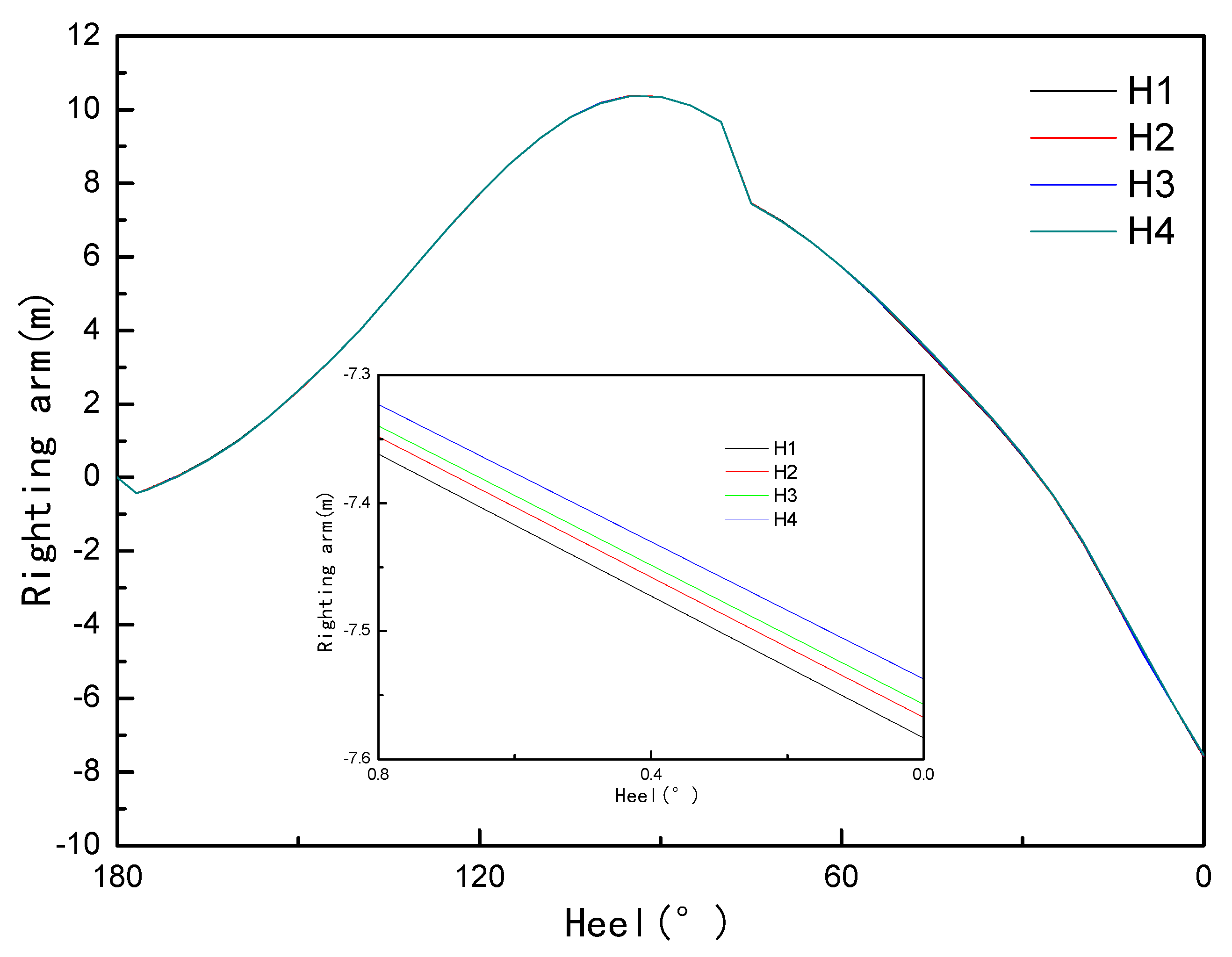
4.3.1. Righting Arm
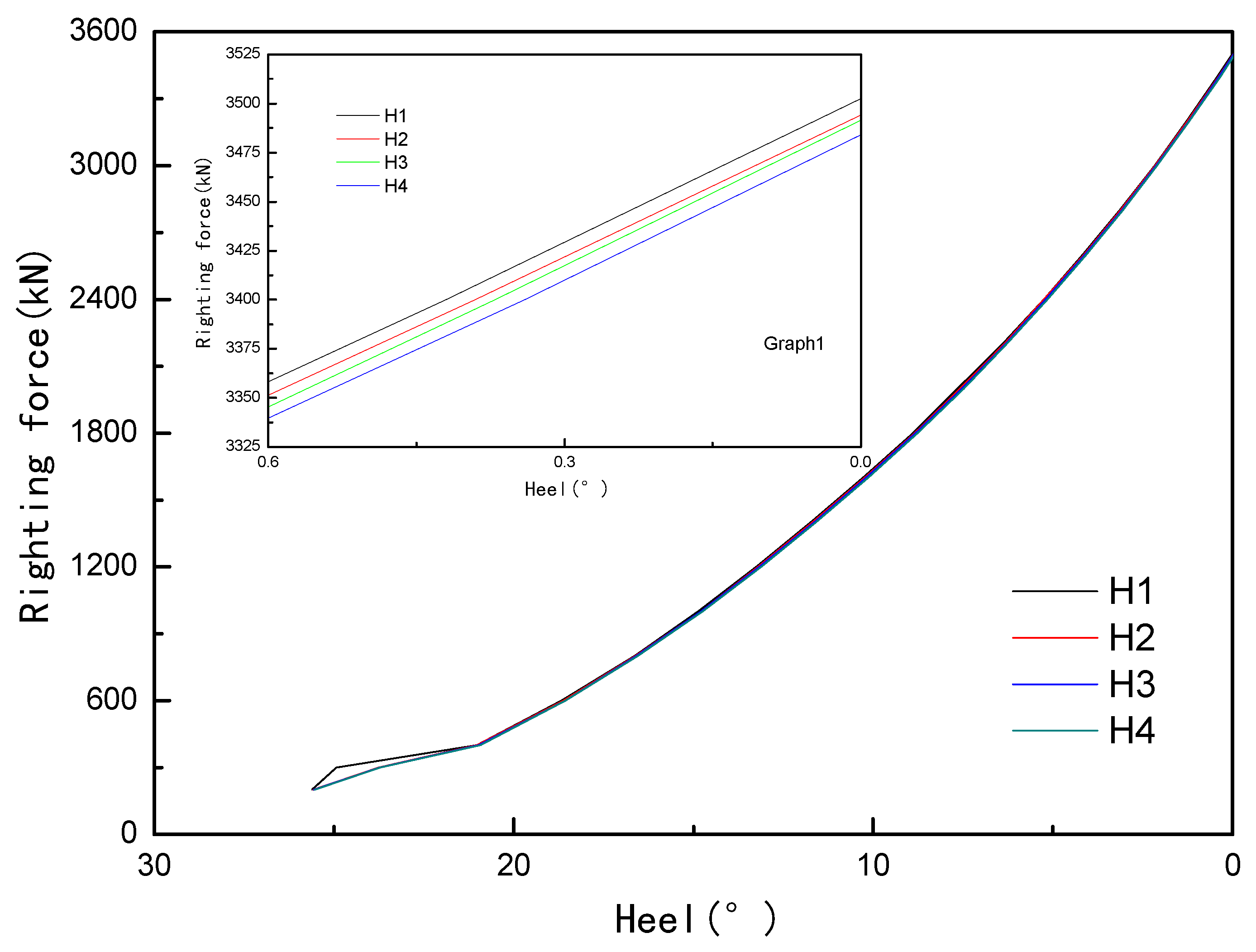
4.3.2. Righting Force
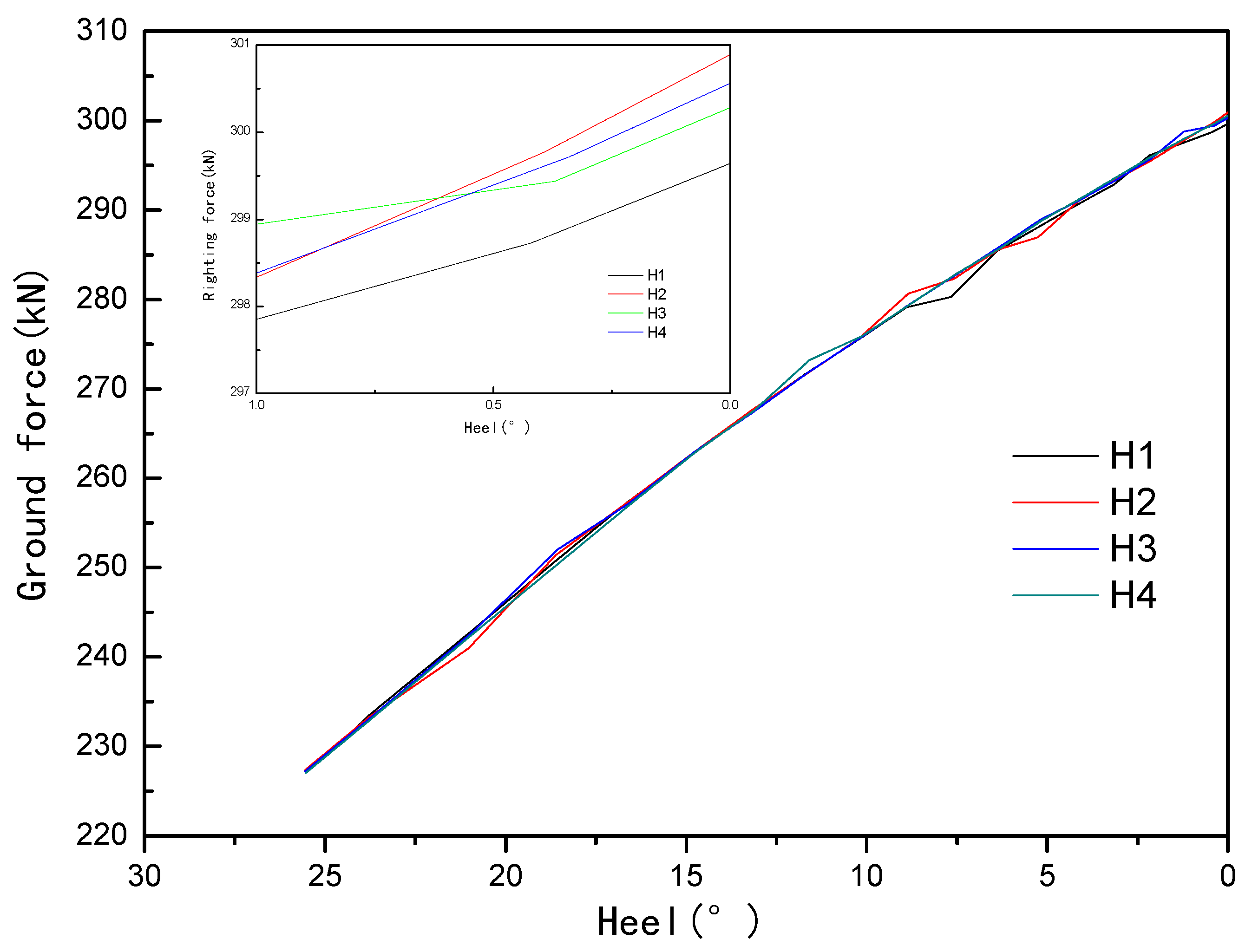
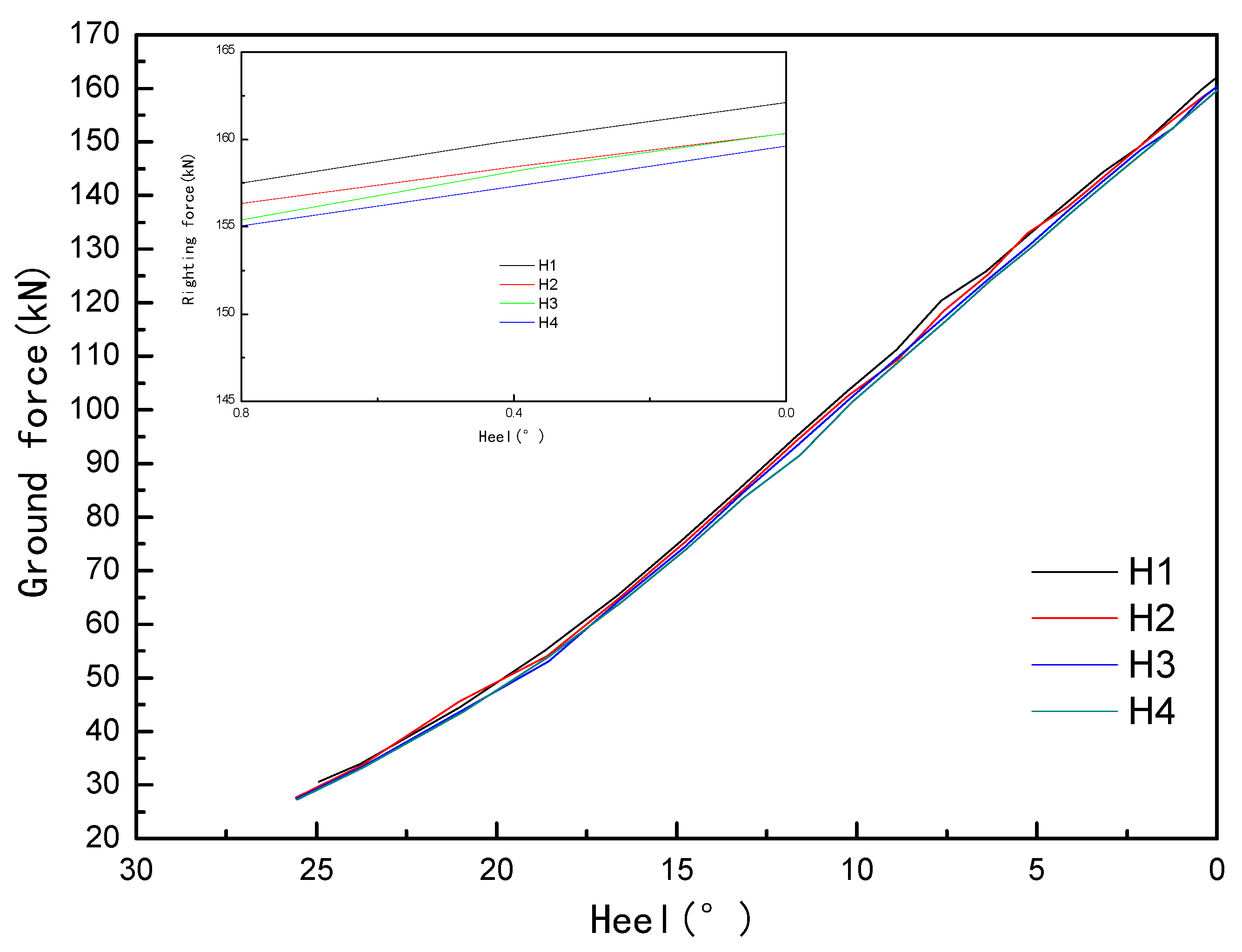
4.3.3. Ground Force
4.4. The Effect of Encounter Angle on the Uprighting Process
4.4.1. Righting Arm
4.4.2. Righting Force
4.4.3. Ground Force
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Taimuri, G.; Ruponen, P.; Hirdaris, S. A novel method for the probabilistic assessment of ship grounding damages and their impact on damage stability. Struct. Saf. 2023, 100, 102281. [Google Scholar] [CrossRef]
- Wang, Z.; Fu, J.; Wang, Z.; Liang, E.; Liu, K. A study on the grounding performance of VLCC considering the influence of material dynamic nonlinearity. J. Vib. Shock 2017, 36, 73–80. [Google Scholar]
- Yang, Z.; Mirnaghi, F.; Shah, K.; Lambert, P.; Hollebone, B.; Yang, C.; Brown, C.E.; Thomas, G.; Grant, R. Source identification and evolution of oils recovered from the MV Manolis L shipwreck. Fuel 2020, 271, 117684. [Google Scholar] [CrossRef]
- Lee, W.; Ham, S.; Ku, N. A Calculation Method of the Ship’s Posture Based on the Static Equilibrium for the Refloating Plan of the Stranded Ship. J. Soc. Nav. Archit. Korea 2022, 59, 55–63. [Google Scholar] [CrossRef]
- Hussein, A.W.; El-Dessouky, U.M.; El-Kilani, H.S.; Hegazy, E.H. Grounding contingency plan for intact double hull tanker. Alex. Eng. J. 2016, 55, 235–241. [Google Scholar] [CrossRef]
- El-Dessouky, U.M.; Hussein, A.W.; El-Kilani, H.S.; Hegazy, E.H. Refloating Scenarios of an Intact Stranded Tanker. Transfer 2009, 20, 2. [Google Scholar]
- Youssef, S.A.M.; Aik, J.K. Hazard identification and scenario selection of ship grounding accidents. Ocean Eng. 2018, 153, 242–255. [Google Scholar] [CrossRef]
- Gu, H. Research on the Characteristics of Wave Loads for Very Large Floating Structure; Jiangshu University of Science and Technology: Zhenjiang, China, 2015. [Google Scholar]
- Li, R. The Models Based on the Finite Element Method for the Dynamic Response of Double-Tubes Submerged Floating Tunnels under Wave Loading; Dalian University of Technology: Dalian, China, 2020. [Google Scholar]
- Zhang, S. Research on Key Techniques Gyro Float Wave Power Generator; Hebei University of Technology: Tianjin, China, 2019. [Google Scholar]
- Wang, H. The Study of Coupled Motion Response of Mooring Offshore Platform near the Reef Island with Ship Berthing; Jiangshu University of Science and Technology: Zhenjiang, China, 2018. [Google Scholar]
- Qiao, W.; Duan, W.; Jiang, D.; Chen, H.; Feng, X.; Sun, Y. Influence mechanism of vertical porous walls on wave scattering and exciting forces initiated by a floating body. J. Harbin Eng. Univ. 2018, 39, 1837–1842. [Google Scholar]
- Ham, S.; Roh, M.; Kim, J. Numerical analysis of wreck removal based on multibody system dynamics. J. Mar. Sci. Technol. 2017, 23, 521–535. [Google Scholar] [CrossRef]
- Mikuli, A.; Parunov, J.; Soares, C.G. Wave-Induced Vertical Motions and Bending Momentsin Damaged Ships. J. Mar. Sci. Appl. 2018, 17, 17. [Google Scholar]
- Huang, Z.; Kou, Y.; Xiao, L. Study on the wave propagation over the submerged reef and its wave load on the large bottom-sitting ship. J. Ship Mech. 2022, 026. [Google Scholar]
- Sun, X. Study of Grounded Forces about Un-Continuous Bottom Supported Ship-Type Structures. J. Ordnance Equip. Eng. 2019, 40, 189–192. [Google Scholar]
- Ye, H.; Chen, S.; Qiao, G.; Liu, Y.; Chi, J. Reconstruction Design and Application of Bottom-supported Salvage Crane Vessel from Unmanned Cargo Barge. Ship Ocean. Eng. 2022, 051-003. [Google Scholar]
- Zhang, H. Research on Hydrodynamic Characteristics of Deep-Sea Carrier Unpowered Floating; Northeastern University: Shenyang, China, 2019. [Google Scholar]
- Chen, Q. Research on Hydrodynamic Characteristics of a Fish Cage Based on Jacket Structure; Dalian University of Technology: Dalian, China, 2020. [Google Scholar]
- Shao, G. Research on USV Platform Design for UAV-USV Cooperation; Dalian University of Technology: Dalian, China, 2019. [Google Scholar]
- Abouelfadl, A.H.; Abdelraouf, E.E.Y. A Guide to the Influence of Ground Reaction on Ship Stability. J. Shipp. Ocean Eng. 2017, 7, 262–273. [Google Scholar]
- de Sousa Bastos, P.C.; Tapia Reyes, M.C. Stability of Ships with a Single Stranding Point. Ship Sci. Technol. 2014, 7, 15–26. [Google Scholar] [CrossRef]
- John, G. Springer Handbook of Ocean Engineering; Reference Reviews; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Hudson, P.J. Wave-Induced Migration of Grounded Ships; The Johns Hopkins University: Baltimore, MD, USA, 2002. [Google Scholar]
- Pedersen, P.T. A Pioneer of Ship Collision and Grounding. Ships Offshore Struct. 2021, 16, 5–10. [Google Scholar] [CrossRef]
- Pan, D.; Lin, C.; Sun, D.; Zhou, C. Calculation method of grounding ship during righting process. J. Traffic Transp. Eng. 2014, 14, 53–63. [Google Scholar]
- Pan, D.; Lin, C.; Sun, D.; Liu, Z.; Zhou, C. Uprighting process analysis of big-angle tilted aground ship. J. Traffic Transp. Eng. 2015, 15, 50–58. [Google Scholar]
- Pan, D. Force Analysis and Calculation for Righting a Capsized Ship; Dalian Maritime University: Dalian, China, 2017. [Google Scholar]
- Zeng, Y. Ocean Engineering Environment; Shanghai Jiao Tong University Press: Shanghai, China, 2007. [Google Scholar]
- Qiu, D. The Wave Theory and Its Application in Engineering; Higher Education Press: Beijing, China, 1985. [Google Scholar]
- Xie, Y.; Chen, Y.; Zhang, R. Ship Design Principle; National Defense Industry Press: Beijing, China, 2015. [Google Scholar]
- Pan, D.; Lin, C.; Liu, Z.; Sun, D. Calculation on the uprighting process of a capsized Ship. Brodogradnja 2016, 67, 115–132. [Google Scholar] [CrossRef]
- Creative Systems, Inc. User’s Reference Manual; Creative Systems, Inc.: Washington, DC, USA, 2010. [Google Scholar]
- Pu, J.Y.; Hou, Y.; Ren, K. Jianchuan Shengmingli Yu Sunguanzuzhi; National Defense Industry Press: Beijing, China, 2016. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length Overall (m) | Breadth (m) | Molded Depth (m) | Draft (m) |
|---|---|---|---|
| 90.874 | 24.544 | 23.732 | 4.762 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, D.; Liu, Z.; Zhou, Z.; Geng, Y.; Shang, J.; Min, Z.; Zhang, W. Analysis of Wave Parameters on the Uprighting Process of a Grounded and Capsized Ship. Water 2023, 15, 1654. https://doi.org/10.3390/w15091654
Pan D, Liu Z, Zhou Z, Geng Y, Shang J, Min Z, Zhang W. Analysis of Wave Parameters on the Uprighting Process of a Grounded and Capsized Ship. Water. 2023; 15(9):1654. https://doi.org/10.3390/w15091654
Chicago/Turabian StylePan, Dewei, Zhijie Liu, Zhaoxin Zhou, Yanan Geng, Jinpeng Shang, Zhen Min, and Wei Zhang. 2023. "Analysis of Wave Parameters on the Uprighting Process of a Grounded and Capsized Ship" Water 15, no. 9: 1654. https://doi.org/10.3390/w15091654
APA StylePan, D., Liu, Z., Zhou, Z., Geng, Y., Shang, J., Min, Z., & Zhang, W. (2023). Analysis of Wave Parameters on the Uprighting Process of a Grounded and Capsized Ship. Water, 15(9), 1654. https://doi.org/10.3390/w15091654