
A Multi-Objective Improved Hybrid Butterfly Artificial Gorilla Troop Optimizer for Node Localization in Wireless Sensor Groundwater Monitoring Networks



Abstract
:1. Introduction
2. Literature Review
- For the localization of the nodes, a multi-objective improved hybrid butterfly artificial gorilla troop optimizer is used.
- The hybrid (butterfly artificial intelligence + artificial gorilla troop optimizer) and improved hybrid butterfly artificial gorilla troop optimizer techniques are used for the analysis.
3. Materials and Methods
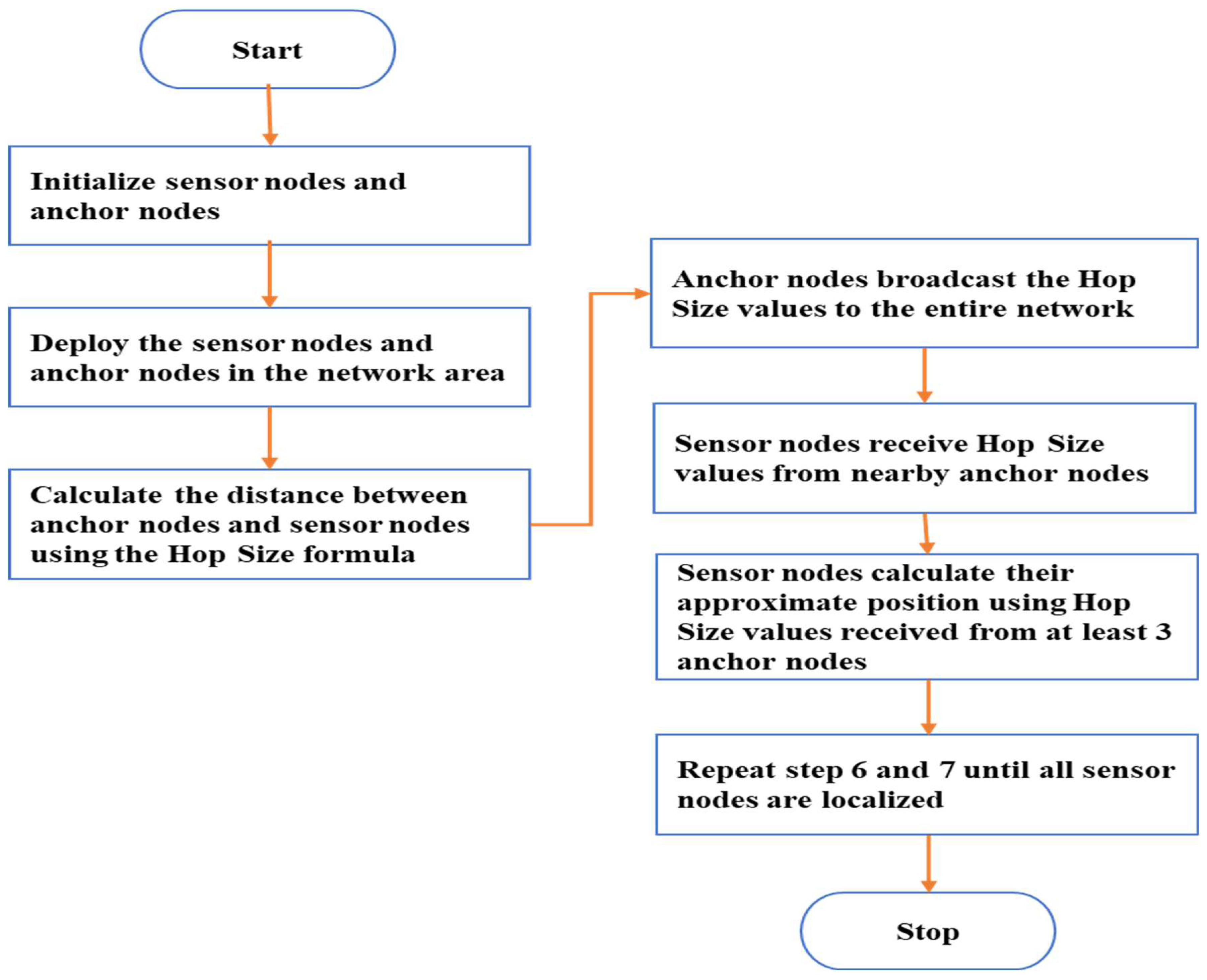
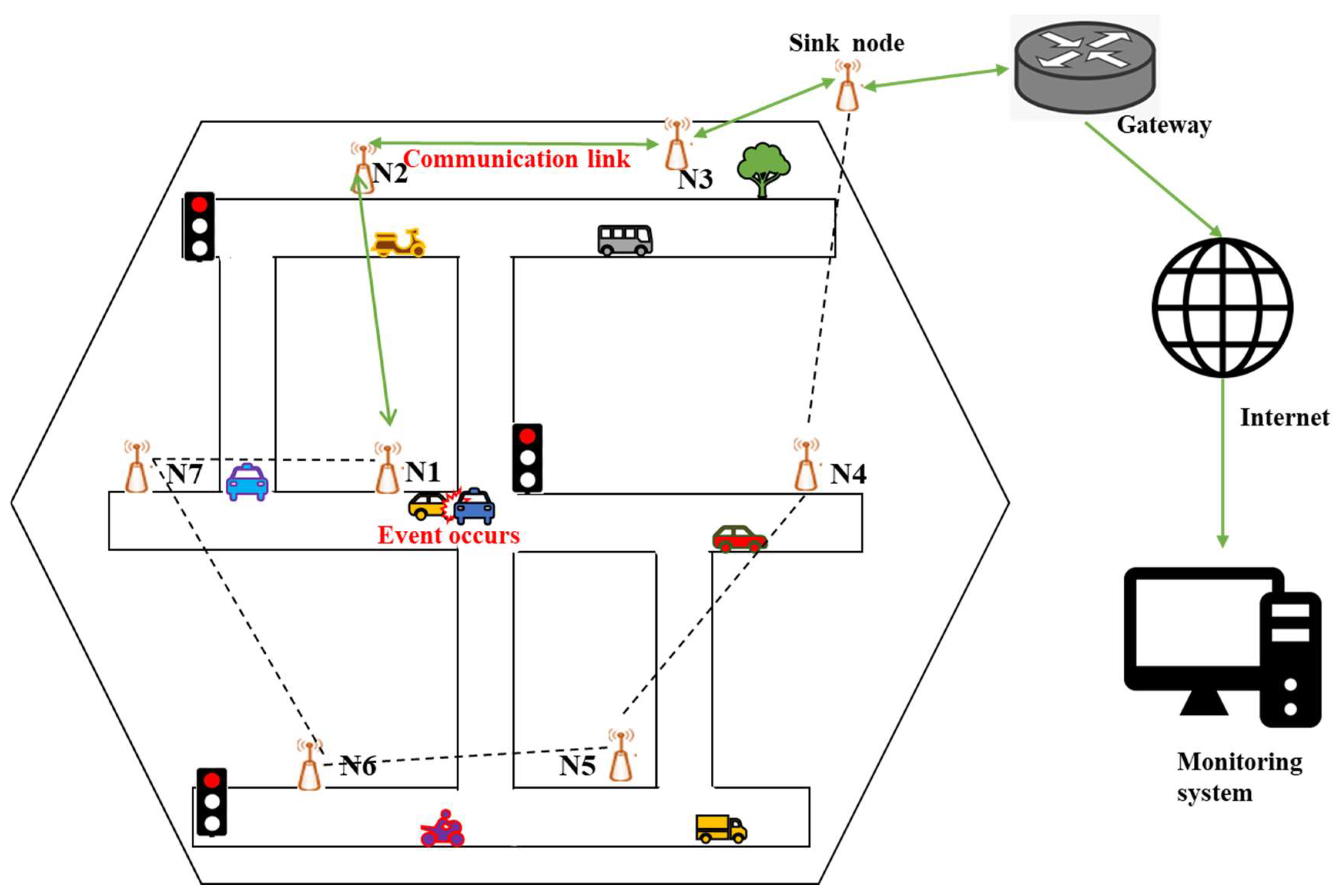
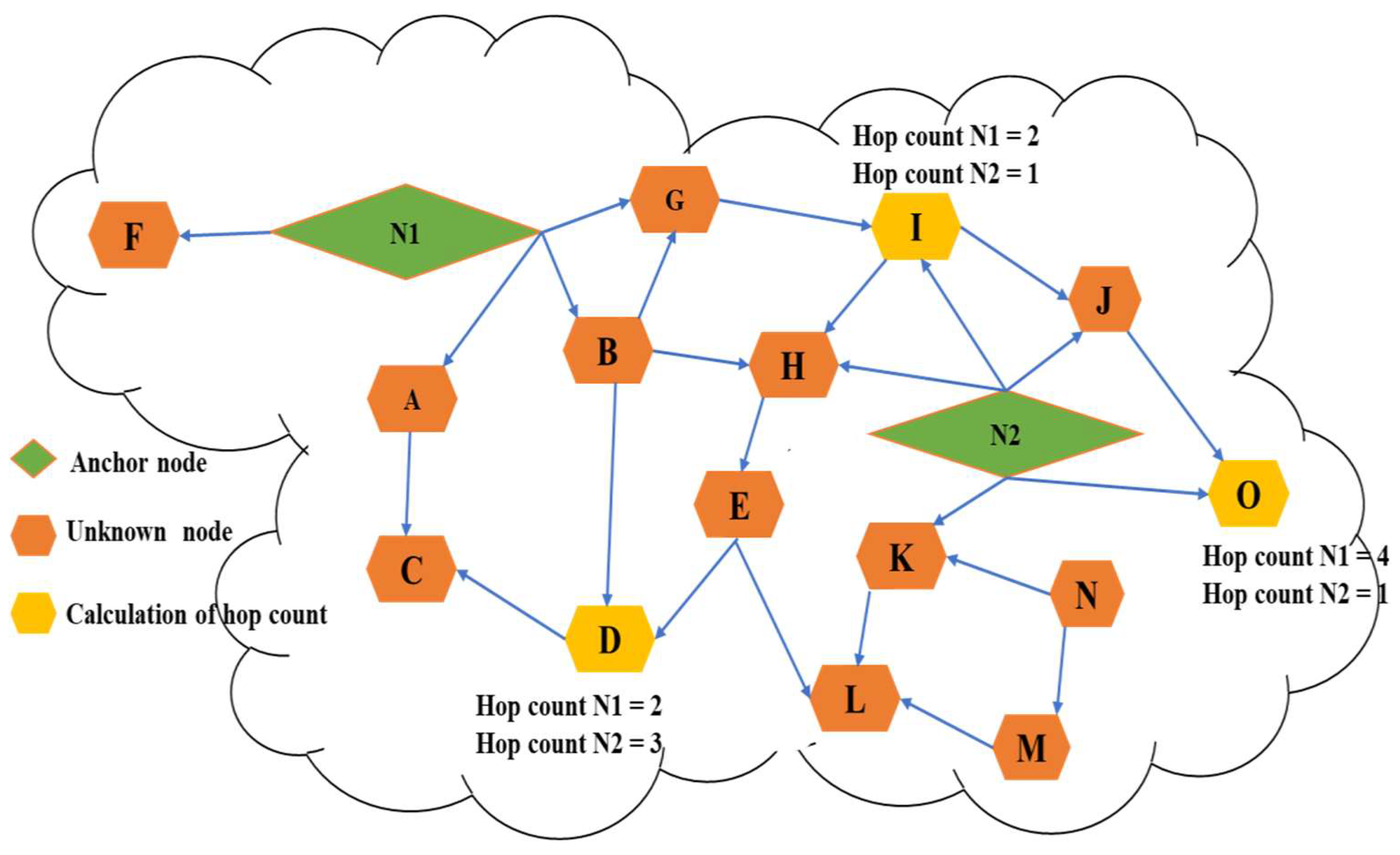
3.1. New Node Localization Model
∑i = j hi,j
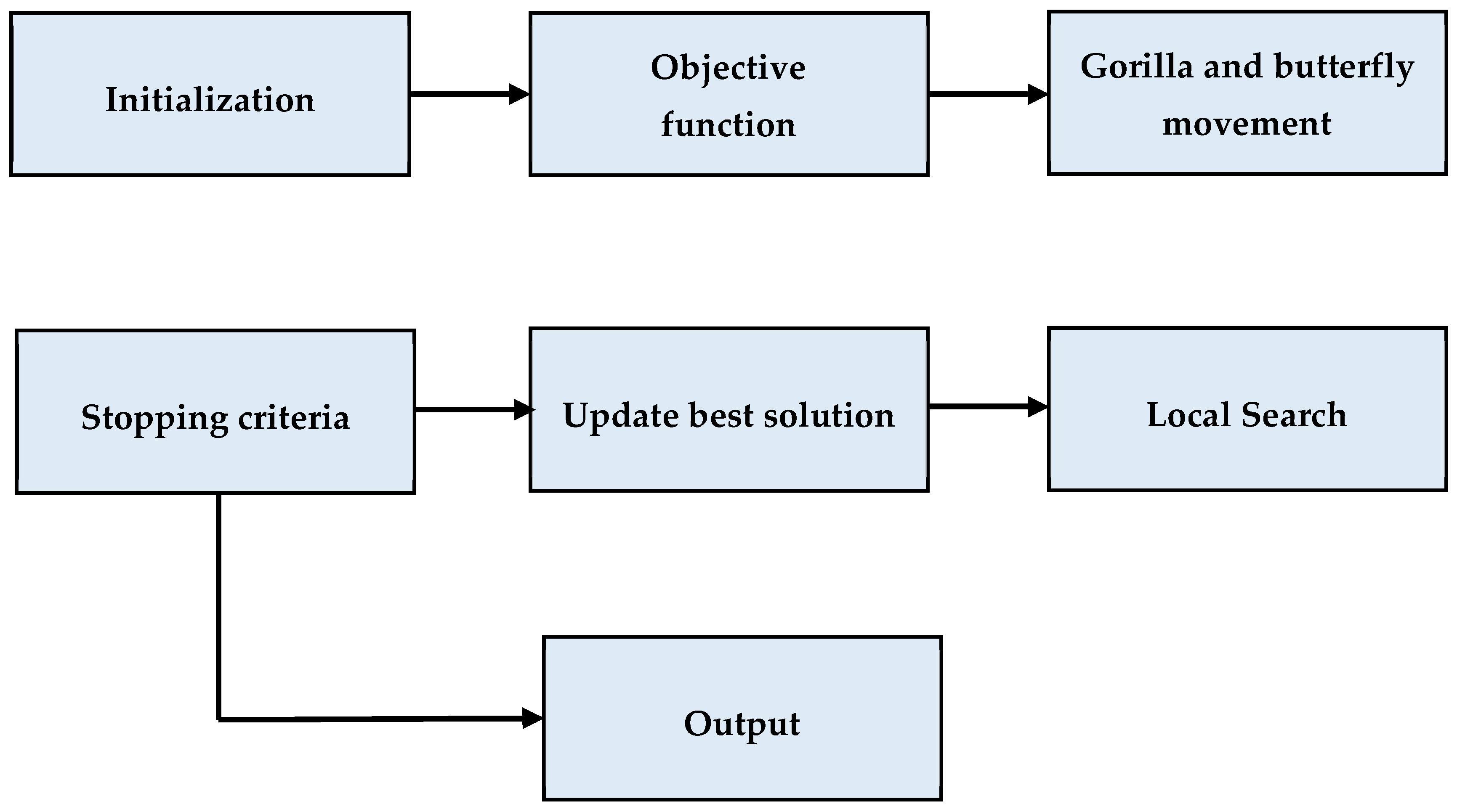
3.2. Hybrid Butterfly Artificial Gorilla Troop Optimizer (iHBAGTO)
- Initialization: Initialize the population of solutions randomly.
- Objective Function: Evaluate the fitness of each solution using an objective function.
- Butterfly Movement: Apply butterfly movement to update the positions of solutions based on the best solution found so far.
- Local Search: Apply local search to improve the solutions by exploring the neighborhood of each solution.
- Update Best Solution: Update the best solution found so far.
- Stopping Criteria: Check if the stopping criteria are met. If not, go back to step 2.
- Output: Return the best solution found as the final solution.
| Algorithm 1 Algorithm for Hybrid Butterfly Artificial Gorilla Troop Optimizer |
| Input: Number of anchor nodes (n), number of target nodes (m), number of iterations (T), lower and upper bounds for the variables, parameters for GTO algorithm (x, D, β), parameters for butterfly operator (p, r) Output: The best solution found during the optimization process // Initialize populations of gorillas and butterflies for k = 1 to n + m randomly initialize the position of the individual and evaluate the fitness of the individual End for for t = 1 to T for k = 1 to n randomly select a gorilla individual A(k) if Rand < z then perform ‘Move to an unknown location’ operation else if Rand >= 0.5, then perform ‘Transition to other gorillas’ operation else perform ‘Migrate to a known position’ operation End if evaluate the fitness of the new individual if (new individual fitness > A(k)) replace A(k) with the new individual End if // Perform exploitation phase using GTO strategies for i = 1 to n randomly select a gorilla individual A(k) If (V >= D) perform ‘Follow the Silverback’ strategy Else perform ‘Competition for adult females’ strategy evaluate the fitness of the new individual End if End for if (new individual > fitness than A(k)) replace A(k) with the new individual End if for i = 1 to do n randomly select a gorilla individual A(k) if (Rand < p) apply butterfly operator to A(k) with parameter r evaluate the fitness of the new individual else if the new individual has a better fitness than A(k) replace A(k) with the new individual End if // Select best solutions from both populations sort individuals in both populations based on fitness select the top n individuals from the gorilla population select the top m individuals from the butterfly population replace the worst n individuals in the gorilla population with the selected individuals replace the worst m individuals in the butterfly population with the selected individuals // Output the best solution found sort individuals in both populations based on fitness return individuals with best fitness |
| Algorithm 2 Pseudocode for the Artificial Gorilla Troop Optimizer (GTO) Algorithm |
| Input: objective function Output: the best solution Initialization: population of gorillas within the search space Set max_iter = maximum number of iterations, parameters x, M, β, and i. For each gorilla Evaluate fitness End for a. Perform the exploration phase: For each gorilla Generate a random number, Rand If (Rand < x) move to a new random location within the search space Else If (Rand ≥ 0.5) follow the silverback gorilla using the equation PA(t + 1) Else If (Rand < 0.5) compete for adult females using the equation PE(k) End if End for b. Evaluate the fitness of each gorilla after the exploration phase. c. Perform the exploitation phase: for each gorilla Calculate the values of V and D If (V ≥ D) follow the silverback using the equation PA(t + 1) Else If (V < D) compete for adult females using the equation PE(k) End if End for Evaluate fitness Output best solution found |
n2, Rand < 0.5
| Algorithm 3 Algorithm for Butterfly Artificial Intelligence Process |
| Input: Objective function f(a), sensory morphology c, power exponent x, boundary probability p, butterfly population size n, the maximum number of iterations max_iter, F-fitness Output: Best solution found b* Initialization: population A = {a1, a2, ..., an} with intensity Ik for t = 1 to max_iter Calculate the fitness of each butterfly i in A Find best_position End for While convergence not met for k = 1 to n Calculate the fragrance of butterfly k Generate a random number P between 0 and 1 if (P <= p) Select a butterfly j with the highest fitness Update the position of a butterfly i using the global search equation: Ak(t+1) = Akt + (r2 * b* − Akt) Fk r = random number between 0 and 1 b* = best solution found Fk = fragrance of butterfly k else Select two random butterflies i and j Update the position of butterfly k using the local search equation: Ak(t+1) = Akt + (r2 * Ait − Ajt) Fk Ait and Ajt are the positions of butterflies i and j in the current iteration End if if (new_F < F(k)) Update solution space F(k) = new_F end if if (new_F ≤ f_min) f_min = new_F update best_position end if end for Update the power exponent a and p a = 1 − (t/max_iter) end while end for Output the best solution found b* |
3.3. Multi-Functional Derivation
3.4. Test and Efficiency of the Designed iHBAGTO
4. Results and Discussion
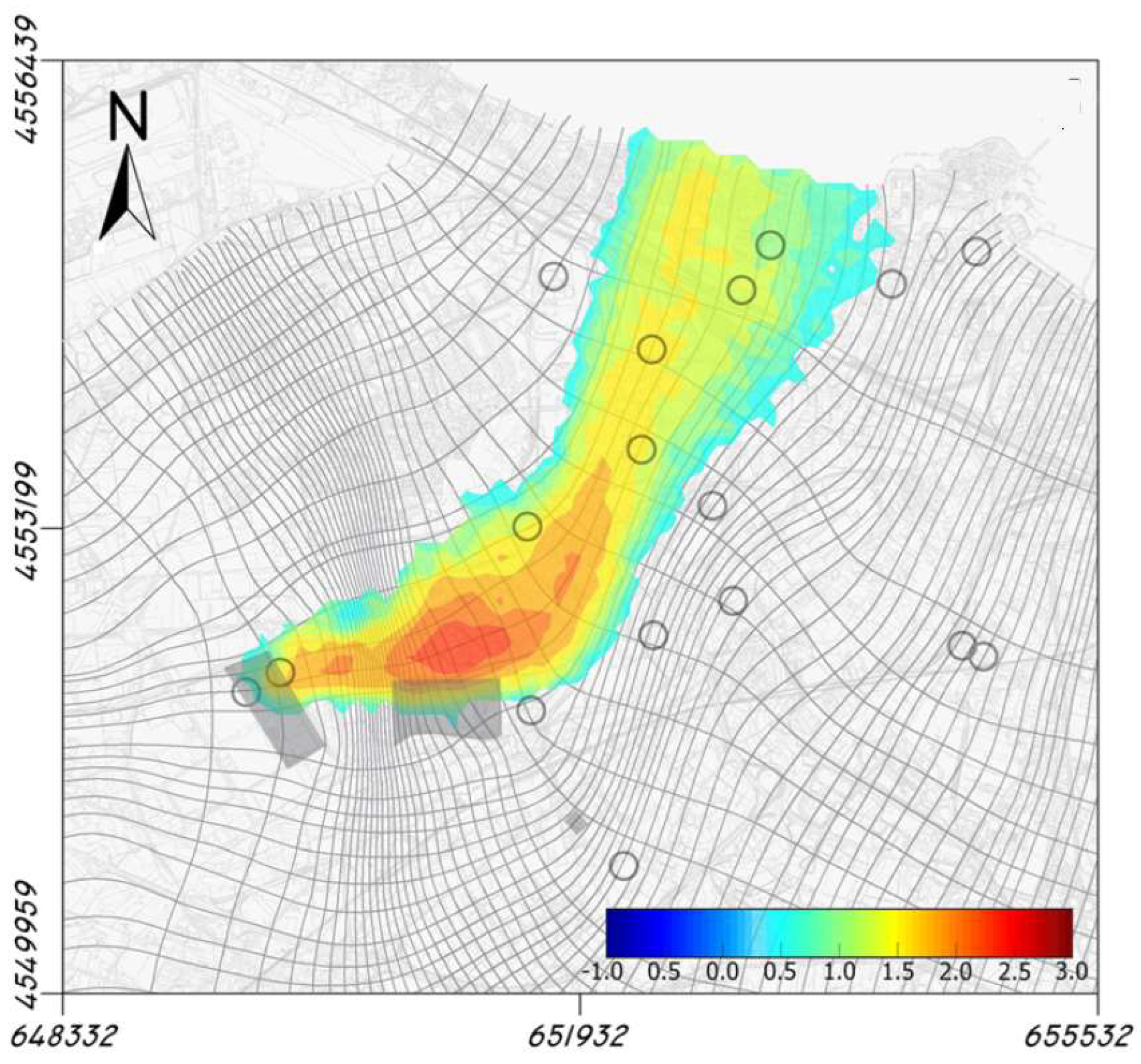
5. Application in the Monitoring of Fractured and Karstic Aquifers
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cherubini, C.; Giasi, C.I.; Pastore, N. Application of modeling for optimal localization of environmental monitoring sensors. In Proceedings of the 2009 3rd International Workshop on Advances in Sensors and Interfaces, Trani, Italy, 25–26 June 2009; pp. 222–227. [Google Scholar] [CrossRef]
- Lauinger, V.; Buchali, F.; Schmalen, L. Blind Equalization and Channel Estimation in Coherent Optical Communications Using Variational Autoencoders. IEEE J. Sel. Areas Commun. 2022, 40, 2529–2539. [Google Scholar] [CrossRef]
- El-Dabah, M.A.; Hassan, M.H.; Kamel, S.; Abido, M.A.; Zawbaa, H.M. Optimal Tuning of Power System Stabilizers for a Multi-Machine Power Systems Using Hybrid Gorilla Troops and Gradient-Based Optimizers. IEEE Access 2023, 11, 27168–27188. [Google Scholar] [CrossRef]
- El Zini, J.; Rizk, Y.; Awad, M. A Deep Transfer Learning Framework for Seismic Data Analysis: A Case Study on Bright Spot Detection. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3202–3212. [Google Scholar] [CrossRef]
- Guo, Y.; Pan, B.; Fu, Y.; Meng, M.Q.-H. CAM-FoC: A High Accuracy Lightweight Deep Neural Network for Grip Force Measurement of Elongated Surgical Instrument. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Sihwail, R.; Omar, K.; Ariffin, K.A.Z.; Tubishat, M. Improved Harris Hawks Optimization Using Elite Opposition-Based Learning and Novel Search Mechanism for Feature Selection. IEEE Access 2020, 8, 121127–121145. [Google Scholar] [CrossRef]
- Singh, N.K.; Gope, S.; Koley, C.; Dawn, S.; Alhelou, H.H. Optimal Bidding Strategy for Social Welfare Maximization in Wind Farm Integrated Deregulated Power System Using Artificial Gorilla Troops Optimizer Algorithm. IEEE Access 2022, 10, 71450–71461. [Google Scholar] [CrossRef]
- El-Dabah, M.A.; Hassan, M.H.; Kamel, S.; Zawbaa, H.M. Robust Parameters Tuning of Different Power System Stabilizers Using a Quantum Artificial Gorilla Troops Optimizer. IEEE Access 2022, 10, 82560–82579. [Google Scholar] [CrossRef]
- Wang, L.; Cao, Q.; Zhang, Z.; Mirjalili, S.; Zhao, W. Artificial rabbits optimization: A new bio-inspired meta-heuristic algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2022, 114, 105082. [Google Scholar] [CrossRef]
- Dehghani, M.; Hubálovský, Š.; Trojovský, P. Northern goshawk optimization: A new swarm-based algorithm for solving optimization problems. IEEE Access 2021, 9, 162059–162080. [Google Scholar] [CrossRef]
- Kutlu Onay, F.; Aydemír, S.B. Chaotic hunger games search optimization algorithm for global optimization and engineering problems. Math. Comput. Simul. 2022, 192, 514–536. [Google Scholar] [CrossRef]
- Tang, A.D.; Tang, S.Q.; Han, T.; Zhou, H.; Xie, L. A modified slime mould algorithm for global optimization. Comput. Intell. Neurosci. 2021, 2021, 2298215. [Google Scholar] [CrossRef] [PubMed]
- Said, M.; Houssein, E.H.; Deb, S.; Ghoniem, R.M.; Elsayed, A.G. Economic Load Dispatch Problem Based on Search and Rescue Optimization Algorithm. IEEE Access 2022, 10, 47109–47123. [Google Scholar] [CrossRef]
- Dehkordi, A.A.; Etaati, B.; Neshat, M.; Mirjalili, S. Adaptive Chaotic Marine Predators Hill Climbing Algorithm for Large-scale Design Optimisations. IEEE Access 2023, 11, 39269–39294. [Google Scholar] [CrossRef]
- López-Antequera, M.; Vallina, M.L.; Strisciuglio, N.; Petkov, N. Place and Object Recognition by CNN-Based COSFIRE Filters. IEEE Access 2019, 7, 66157–66166. [Google Scholar] [CrossRef]
- Mouassa, S.; Althobaiti, A.; Jurado, F.; Ghoneim, S.S.M. Novel Design of Slim Mould Optimizer for the Solution of Optimal Power Flow Problems Incorporating Intermittent Sources: A Case Study of Algerian Electricity Grid. IEEE Access 2022, 10, 22646–22661. [Google Scholar] [CrossRef]
- Tan, A.; Zhou, G.; He, M. Rapid Fine-Grained Classification of Butterflies Based on FCM-KM and Mask R-CNN Fusion. IEEE Access 2020, 8, 124722–124733. [Google Scholar] [CrossRef]
- Guo, G.-Q.; Chai, B.; Cheng, R.-C.; Wang, Y.-S. Real-Time Temperature Drift Compensation Method of a MEMS Accelerometer Based on Deep GRU and Optimized Monarch Butterfly Algorithm. IEEE Access 2023, 11, 10355–10365. [Google Scholar] [CrossRef]
- Pliatsios, D.; Goudos, S.K.; Lagkas, T.; Argyriou, V.; Boulogeorgos, A.-A.A.; Sarigiannidis, P. Drone-Base-Station for Next-Generation Internet-of-Things: A Comparison of Swarm Intelligence Approaches. IEEE Open J. Antennas Propag. 2022, 3, 32–47. [Google Scholar] [CrossRef]
- Salih, J.F.; Mohammed, H.M.; Abdul, Z.K. Modified Fitness Dependent Optimizer for Solving Numerical Optimization Functions. IEEE Access 2022, 10, 83916–83930. [Google Scholar] [CrossRef]
- Aldasoro, C.C.R.; Bhalerao, A. Volumetric Texture Segmentation by Discriminant Feature Selection and Multiresolution Classification. IEEE Trans. Med. Imaging 2007, 26, 1–14. [Google Scholar] [CrossRef]
- Elminaam, D.S.A.; Nabil, A.; Ibraheem, S.A.; Houssein, E.H. An Efficient Marine Predators Algorithm for Feature Selection. IEEE Access 2021, 9, 60136–60153. [Google Scholar] [CrossRef]
- Lin, Z.; Jia, J.; Gao, W.; Huang, F. Increasingly Specialized Perception Network for Fine-Grained Visual Categorization of Butterfly Specimens. IEEE Access 2019, 7, 123367–123392. [Google Scholar] [CrossRef]
- Prasanthi; Shareef, H.; Errouissi, R.; Asna, M.; Wahyudie, A. Quantum Chaotic Butterfly Optimization Algorithm with Ranking Strategy for Constrained Optimization Problems. IEEE Access 2021, 9, 114587–114608. [Google Scholar] [CrossRef]
- Zhang, B.; Yang, X.; Hu, B.; Liu, Z.; Li, Z. OEbBOA: A Novel Improved Binary Butterfly Optimization Approaches with Various Strategies for Feature Selection. IEEE Access 2020, 8, 67799–67812. [Google Scholar] [CrossRef]
- Yu, Y.; Lei, Z.; Wang, Y.; Zhang, T.; Peng, C.; Gao, S. Improving Dendritic Neuron Model with Dynamic Scale-Free Network-Based Differential Evolution. IEEE/CAA J. Autom. Sin. 2022, 9, 99–110. [Google Scholar] [CrossRef]
- Liu, G.; Jia, W.; Luo, Y.; Wang, M.; Heidari, A.A.; Ouyang, J.; Chen, H.; Chen, M. Prediction Optimization of Cervical Hyperextension Injury: Kernel Extreme Learning Machines with Orthogonal Learning Butterfly Optimizer and Broyden-Fletcher-Goldfarb-Shanno Algorithms. IEEE Access 2020, 8, 119911–119930. [Google Scholar] [CrossRef]
- Hashemi, M.H.; Kiliç, U.; Dikmen, S. Applications of Novel Heuristic Algorithms in Design Optimization of Energy-Efficient Distribution Transformer. IEEE Access 2023, 11, 15968–15980. [Google Scholar] [CrossRef]
- de Sousa, T.F.B.; Fernandes, M.A.C. Butterfly Neural Filter Applied to Beamforming. IEEE Access 2019, 7, 96455–96469. [Google Scholar] [CrossRef]
- Gharehchopogh, F.S.; Ucan, A.; Ibrikci, T.; Arasteh, B.; Isik, G. Slime mould algorithm: A comprehensive survey of its variants and applications. Arch. Comput. Methods Eng. 2023, 30, 2683–2723. [Google Scholar] [CrossRef]
- Cherubini, C. A Modeling Approach for the Study of Contamination in a Fractured Aquifer. Geotech. Geol. Eng. 2008, 26, 519–533. [Google Scholar] [CrossRef]
- Masciopinto, C.; Volpe, A.; Palmiotta, D.; Cherubini, C. 2010 A combined PHREEQC-2/parallel fracture model for the simulation of laminar/non-laminar flow and contaminant transport with reactions. J. Contam. Hydrol. 2010, 117, 94–108. [Google Scholar] [CrossRef]
- Cherubini, C.; Pastore, N. Modeling contaminant propagation in a fractured and karstic aquifer. Fresen. Environ. Bull. 2010, 19, 1788–1794. [Google Scholar]
- Cherubini, C.; Giasi, C.; Pastore, N. Fluid flow modeling of a coastal fractured karstic aquifer by means of a lumped parameter approach. Environ. Earth Sci. 2013, 70, 2055–2060. [Google Scholar] [CrossRef]
- Pastore, N.; Cherubini, C.; Giasi, C.I.; Dimitra, R. Numerical model of the behavior of chlorinated ethenes in a fractured, karstic limestone aquifer. Hydrogeol. J. 2021, 29, 667–686. [Google Scholar] [CrossRef]
- Cherubini, C.; Pastore, N.; Rapti, D.; Giasi, C.I. Numerical modeling of flow and transport in the Bari industrial area by means of rough walled parallel plate and random walk models. Hydrol. Earth Syst. Sci. 2018, 22, 5211–5225. [Google Scholar] [CrossRef]
- Reed, P.; Minsker, B.; Valocchi, A.J. Cost-effective long-term groundwater monitoring design using a genetic algorithm and global mass interpolation. Water Resour. Res. 2000, 36, 3731–3741. [Google Scholar] [CrossRef]
- Wu, J.; Zheng, C.; Chien, C.C. Cost-effective sampling network design for contaminant plume monitoring under general hydrogeological conditions. J. Contam. Hydrol. 2005, 77, 41–65. [Google Scholar] [CrossRef] [PubMed]
- Cherubini, C.; Pastore, N.; Francani, V. Different approaches for the characterization of a 707 fractured karst aquifer. WSEAS Trans. Fluid Mech. 2008, 1, 29–35. [Google Scholar]
- Tubishat; Alswaitti, M.; Mirjalili, S.; Al-Garadi, M.A.; Alrashdan, M.T.; Rana, T.A. Dynamic Butterfly Optimization Algorithm for Feature Selection. IEEE Access 2020, 8, 194303–194314. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author and Year | Proposed System | Method | Algorithm | Future Enhancement |
|---|---|---|---|---|
| El Zini et al. (2019) [4] | In this study, the detection of the bright spot is performed. | The transfer learning method and the data argumentation method are used | Machine learning algorithm | In the future, earthquake prediction will also be conducted for problems other than seismic problems. |
| Guo et al. (2021) [5] | The measurement of grip force using the elongated surgical instrument is performed. Also, the performance of robot-assisted minimally invasive surgery (RMIS) is measured. | The deep learning method is used for the analysis | Binary butterfly optimization algorithm | The performance of the surgery mechanism will be improved. |
| Muhammad et al. (2021) [6] | In this study, the detection of voice pathology detection is performed. | A deep learning-based pathology detection method is used | Deep learning algorithm | The signal transmission effects are to be analyzed using the enhanced VPD system. |
| Singh et al. (2021) [7] | This study uses the strategy of optimal biding. | The MCP method and the game theory model are used | The gorilla troop optimizer algorithm | The profitable management of the integration will be conducted. |
| M. A. El-Dabah et al. (2022) [8] | In this study, the forecasting of an application is performed based on the streamflow. | Preprocessing and the adjustment method are used in this study for data intelligence | Optimization algorithm | Using LSTM, a performance analysis is conducted in this study. |
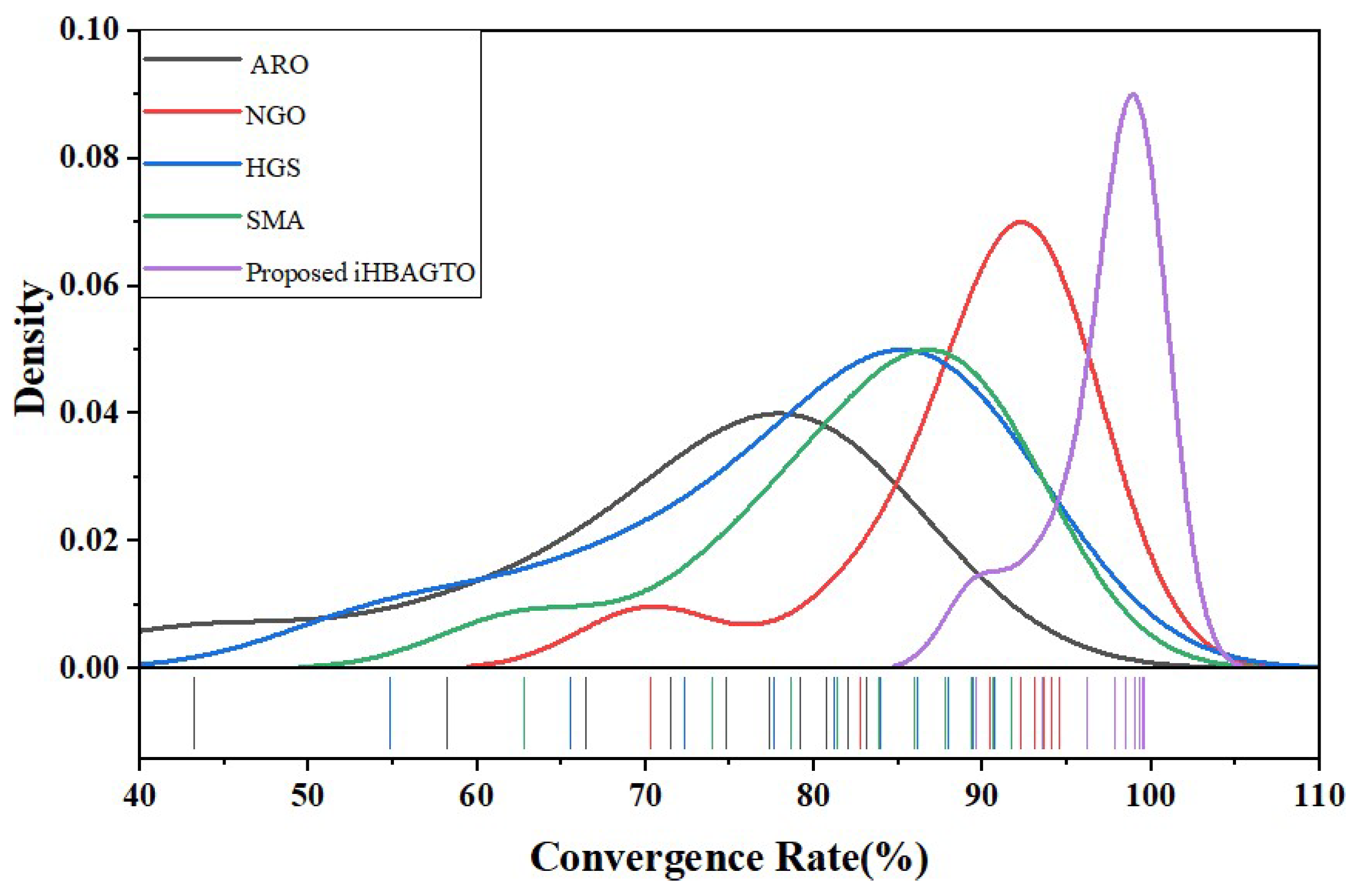
| Iteration Counts | Convergence Rate (%) | ||||
|---|---|---|---|---|---|
| ARO [23] | NGO [24] | HGS [25] | SMA [26] | Proposed iHBAGTO | |
| 10 | 43.2 | 70.3 | 54.8 | 62.8 | 89.6 |
| 20 | 58.2 | 82.7 | 65.5 | 73.9 | 93.5 |
| 30 | 66.4 | 87.9 | 72.3 | 78.6 | 96.2 |
| 40 | 71.5 | 90.4 | 77.6 | 81.4 | 97.8 |
| 50 | 74.8 | 91.7 | 81.2 | 83.8 | 98.5 |
| 60 | 77.3 | 92.3 | 83.9 | 85.9 | 99.0 |
| 70 | 79.2 | 93.1 | 86.1 | 87.8 | 99.3 |
| 80 | 80.7 | 93.6 | 87.9 | 89.3 | 99.5 |
| 90 | 82.0 | 94.1 | 89.4 | 90.6 | 99.6 |
| 100 | 83.1 | 94.5 | 90.7 | 91.7 | 99.6 |
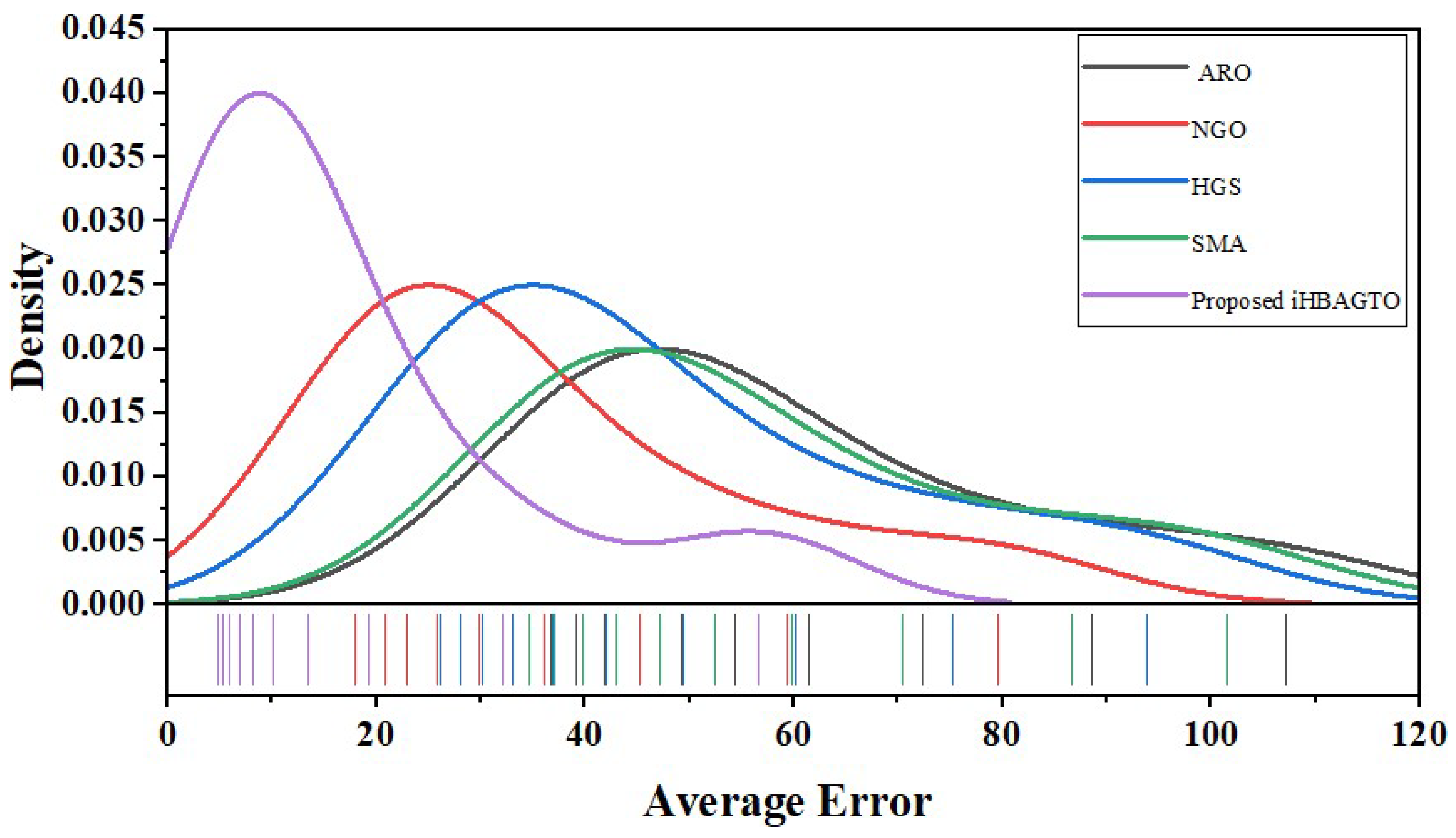
| Iteration Counts | Average Error | ||||
|---|---|---|---|---|---|
| ARO [23] | NGO [24] | HGS [25] | SMA [26] | Proposed iHBAGTO | |
| 10 | 107.2 | 79.6 | 93.8 | 101.5 | 56.7 |
| 20 | 88.6 | 59.3 | 75.2 | 86.7 | 32.1 |
| 30 | 72.3 | 45.2 | 60.1 | 70.5 | 19.3 |
| 40 | 61.5 | 36.1 | 49.4 | 59.8 | 13.5 |
| 50 | 54.4 | 29.9 | 42 | 52.4 | 10.1 |
| 60 | 49.2 | 25.8 | 36.9 | 47.1 | 8.1 |
| 70 | 45.2 | 23 | 33.1 | 43 | 6.9 |
| 80 | 41.9 | 20.9 | 30.2 | 39.8 | 6 |
| 90 | 39.2 | 19.3 | 28 | 37.1 | 5.3 |
| 100 | 36.8 | 18 | 26.1 | 34.7 | 4.8 |
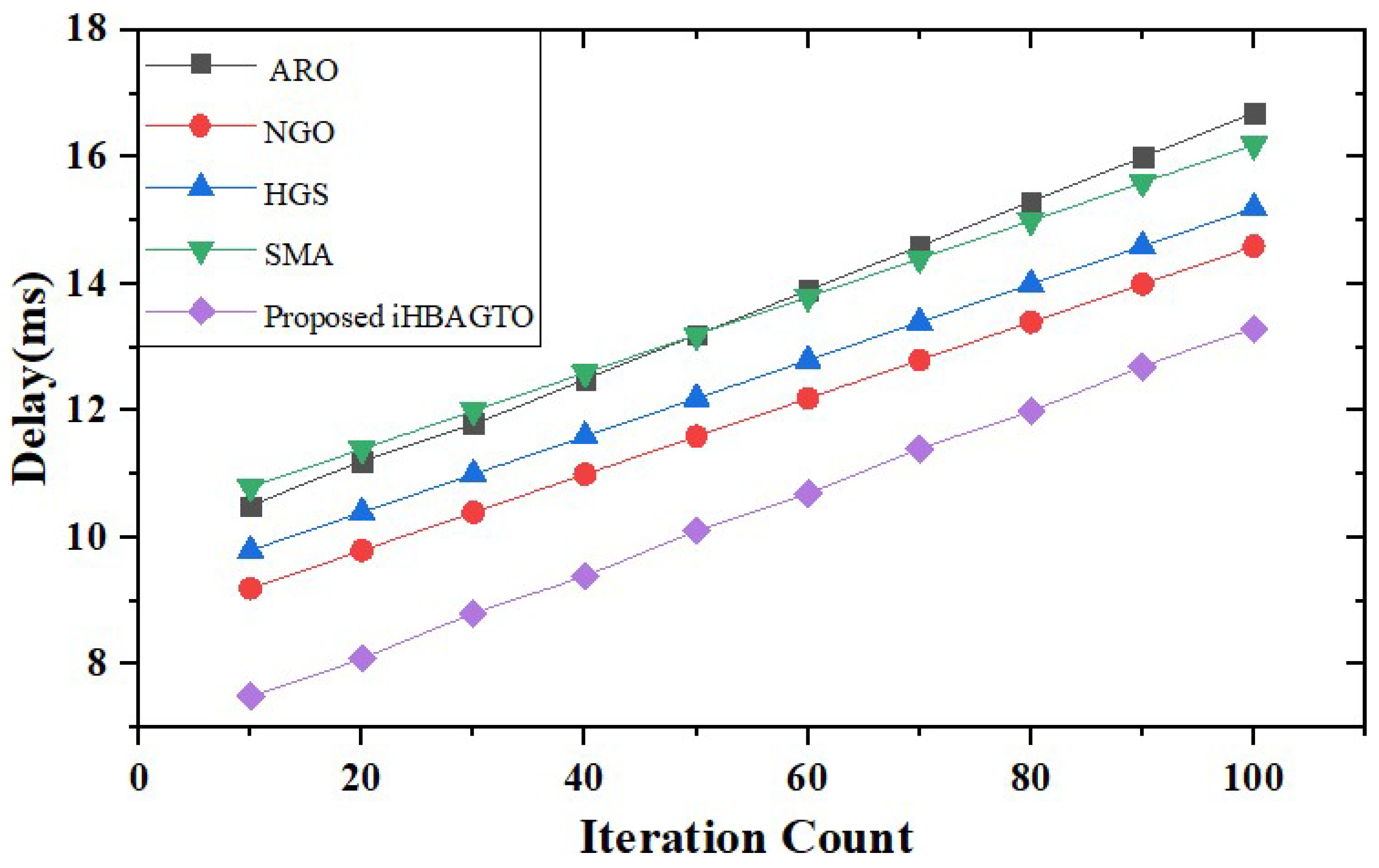
| Iteration Counts | Delay (ms) | ||||
|---|---|---|---|---|---|
| ARO [23] | NGO [24] | HGS [25] | SMA [26] | Proposed iHBAGTO | |
| 10 | 10.5 | 9.2 | 9.8 | 10.8 | 7.5 |
| 20 | 11.2 | 9.8 | 10.4 | 11.4 | 8.1 |
| 30 | 11.8 | 10.4 | 11.0 | 12.0 | 8.8 |
| 40 | 12.5 | 11.0 | 11.6 | 12.6 | 9.4 |
| 50 | 13.2 | 11.6 | 12.2 | 13.2 | 10.1 |
| 60 | 13.9 | 12.2 | 12.8 | 13.8 | 10.7 |
| 70 | 14.6 | 12.8 | 13.4 | 14.4 | 11.4 |
| 80 | 15.3 | 13.4 | 14.0 | 15.0 | 12.0 |
| 90 | 16.0 | 14.0 | 14.6 | 15.6 | 12.7 |
| 100 | 16.7 | 14.6 | 15.2 | 16.2 | 13.3 |
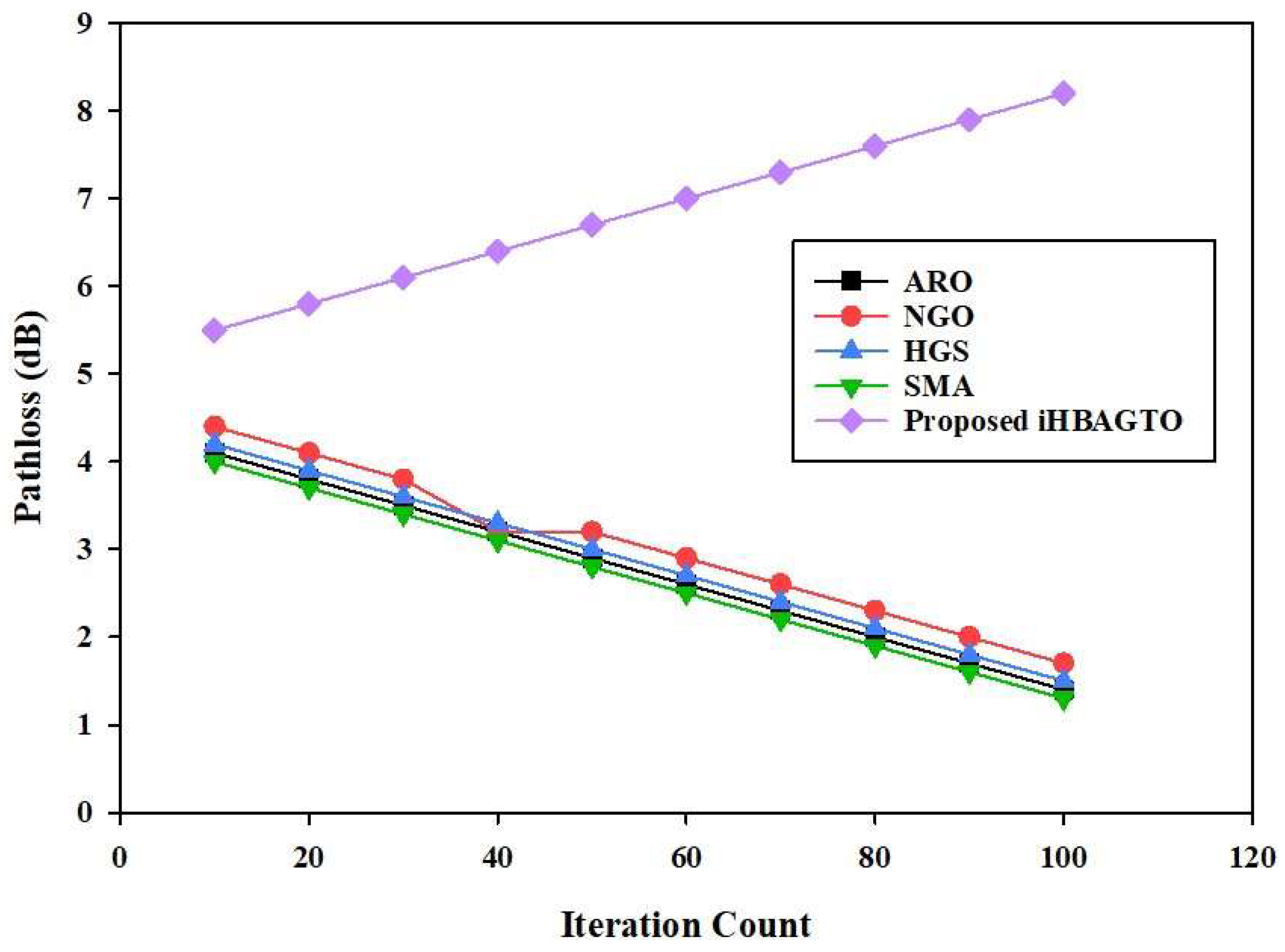
| Iteration Counts | Path Loss (dB) | ||||
|---|---|---|---|---|---|
| ARO [23] | NGO [24] | HGS [25] | SMA [26] | Proposed iHBAGTO | |
| 10 | 4.1 | 4.4 | 4.2 | 4.0 | 5.5 |
| 20 | 3.8 | 4.1 | 3.9 | 3.7 | 5.8 |
| 30 | 3.5 | 3.8 | 3.6 | 3.4 | 6.1 |
| 40 | 3.2 | 3.2 | 3.3 | 3.1 | 6.4 |
| 50 | 2.9 | 3.2 | 3.0 | 2.8 | 6.7 |
| 60 | 2.6 | 2.9 | 2.7 | 2.5 | 7.0 |
| 70 | 2.3 | 2.6 | 2.4 | 2.2 | 7.3 |
| 80 | 2.0 | 2.3 | 2.1 | 1.9 | 7.6 |
| 90 | 1.7 | 2.0 | 1.8 | 1.6 | 7.9 |
| 100 | 1.4 | 1.7 | 1.5 | 1.3 | 8.2 |
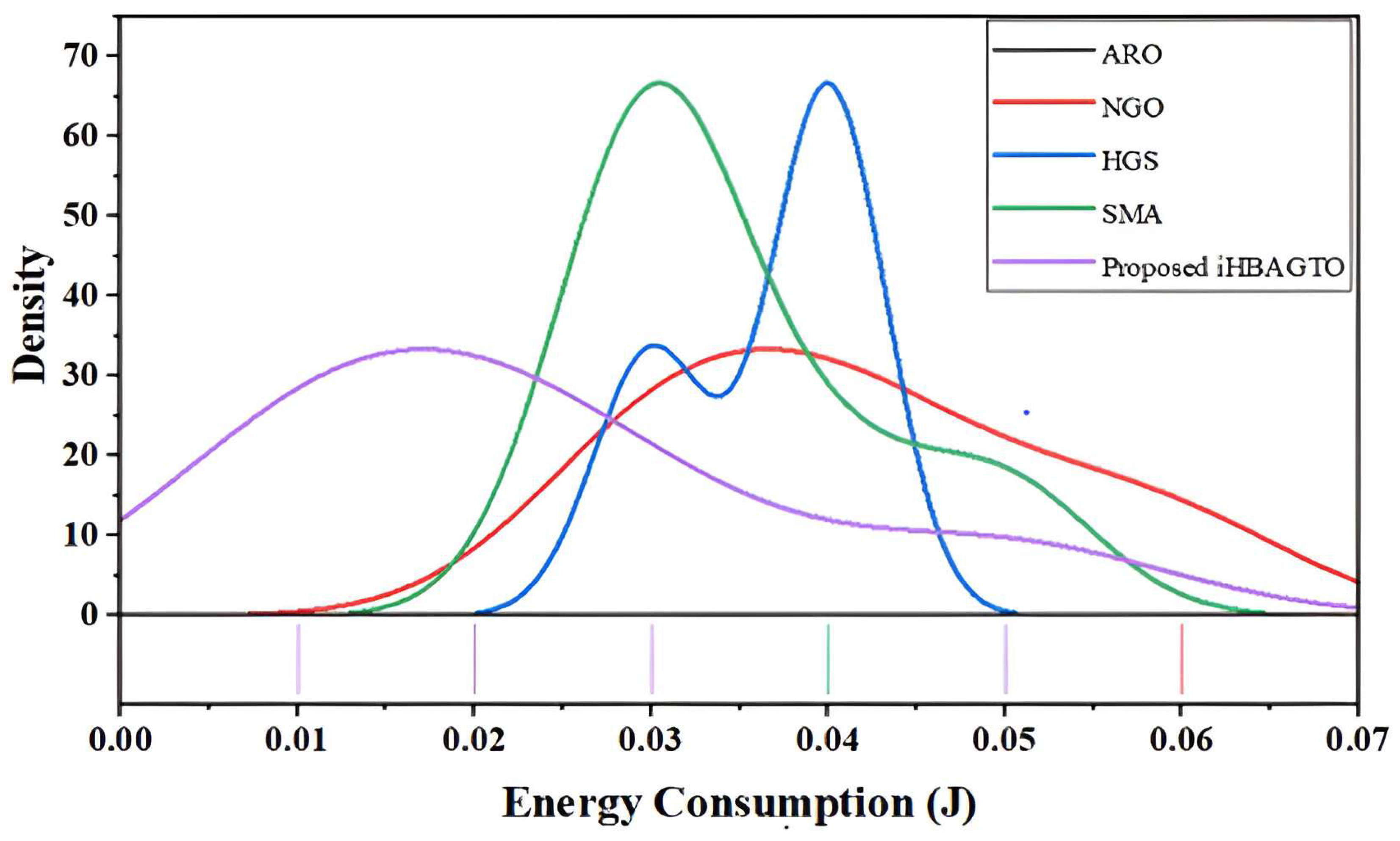
| Iteration Counts | Energy Consumption (J) | ||||
|---|---|---|---|---|---|
| ARO [23] | NGO [24] | HGS [25] | SMA [26] | Proposed iHBAGTO | |
| 10 | 0.05 | 0.06 | 0.04 | 0.05 | 0.05 |
| 30 | 0.04 | 0.05 | 0.03 | 0.04 | 0.03 |
| 50 | 0.03 | 0.04 | 0.03 | 0.03 | 0.02 |
| 70 | 0.03 | 0.04 | 0.04 | 0.03 | 0.02 |
| 90 | 0.03 | 0.03 | 0.04 | 0.03 | 0.01 |
| 100 | 0.03 | 0.03 | 0.04 | 0.03 | 0.01 |
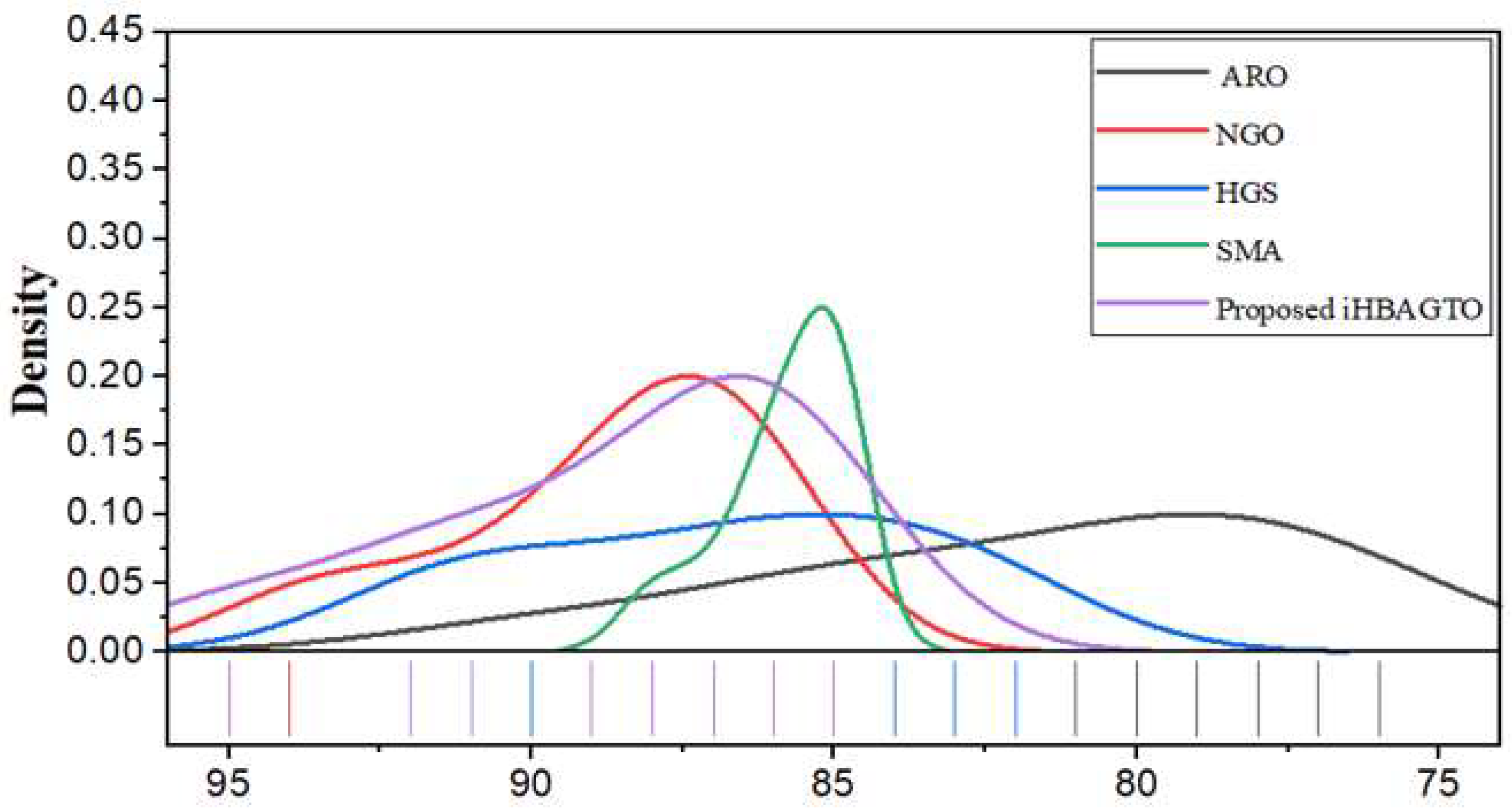
| Iteration Counts | Received Signal Strength (RSS) (dBm) | ||||
|---|---|---|---|---|---|
| ARO [23] | NGO [24] | HGS [25] | SMA [26] | Proposed iHBAGTO | |
| 10 | 90 | 94 | 92 | 88 | 95 |
| 20 | 86 | 92 | 91 | 86 | 92 |
| 30 | 85 | 90 | 90 | 87 | 91 |
| 40 | 83 | 89 | 88 | 85 | 89 |
| 50 | 81 | 88 | 87 | 86 | 88 |
| 60 | 80 | 87 | 86 | 86 | 87 |
| 70 | 79 | 87 | 85 | 85 | 86 |
| 80 | 78 | 86 | 84 | 85 | 85 |
| 90 | 77 | 86 | 83 | 85 | 86 |
| 100 | 76 | 88 | 82 | 85 | 86 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
BalaAnand, M.; Cherubini, C. A Multi-Objective Improved Hybrid Butterfly Artificial Gorilla Troop Optimizer for Node Localization in Wireless Sensor Groundwater Monitoring Networks. Water 2024, 16, 1134. https://doi.org/10.3390/w16081134
BalaAnand M, Cherubini C. A Multi-Objective Improved Hybrid Butterfly Artificial Gorilla Troop Optimizer for Node Localization in Wireless Sensor Groundwater Monitoring Networks. Water. 2024; 16(8):1134. https://doi.org/10.3390/w16081134
Chicago/Turabian StyleBalaAnand, M., and Claudia Cherubini. 2024. "A Multi-Objective Improved Hybrid Butterfly Artificial Gorilla Troop Optimizer for Node Localization in Wireless Sensor Groundwater Monitoring Networks" Water 16, no. 8: 1134. https://doi.org/10.3390/w16081134
APA StyleBalaAnand, M., & Cherubini, C. (2024). A Multi-Objective Improved Hybrid Butterfly Artificial Gorilla Troop Optimizer for Node Localization in Wireless Sensor Groundwater Monitoring Networks. Water, 16(8), 1134. https://doi.org/10.3390/w16081134