
Obtaining the Thermal Structure of Lakes from the Air

Abstract
:
1. Introduction
2. Materials and Methods
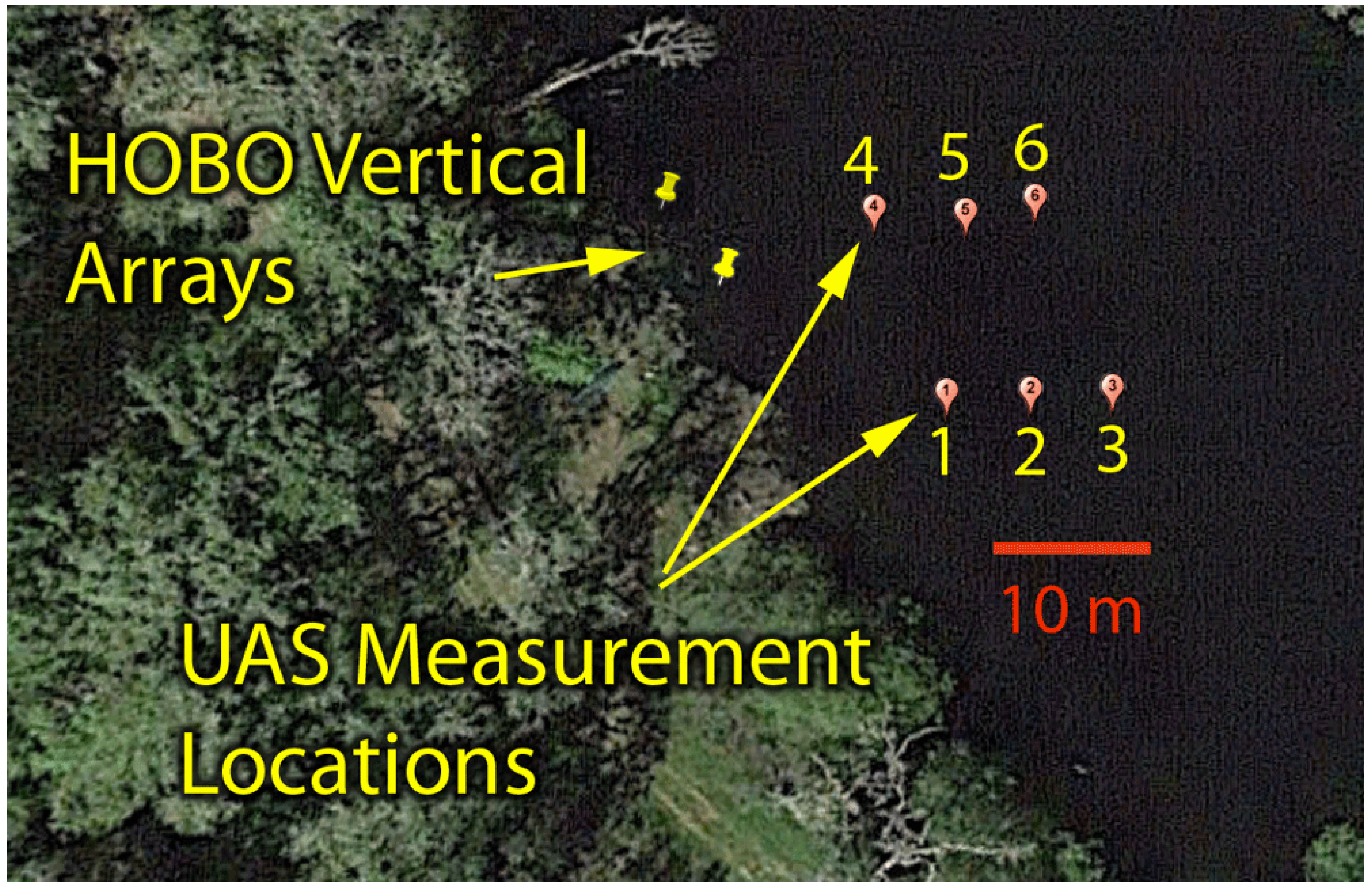
2.1. Site Description

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Specifications |
|---|---|
| In situ temperature | Hobo Pendant Temperature/Light Data Logger |
| Resolution: 0.14 °C at 25 °C | |
| Accuracy: ±0.53 °C | |
| Operating range: −20–50 °C | |
| Pressure-temperature | Measurement Specialties MS5803-01BA sensor |
| Pressure resolution: 0.012 mbar | |
| Pressure accuracy: ±2.5 mbar | |
| Temperature resolution: 0.01 °C | |
| Water contact detector |
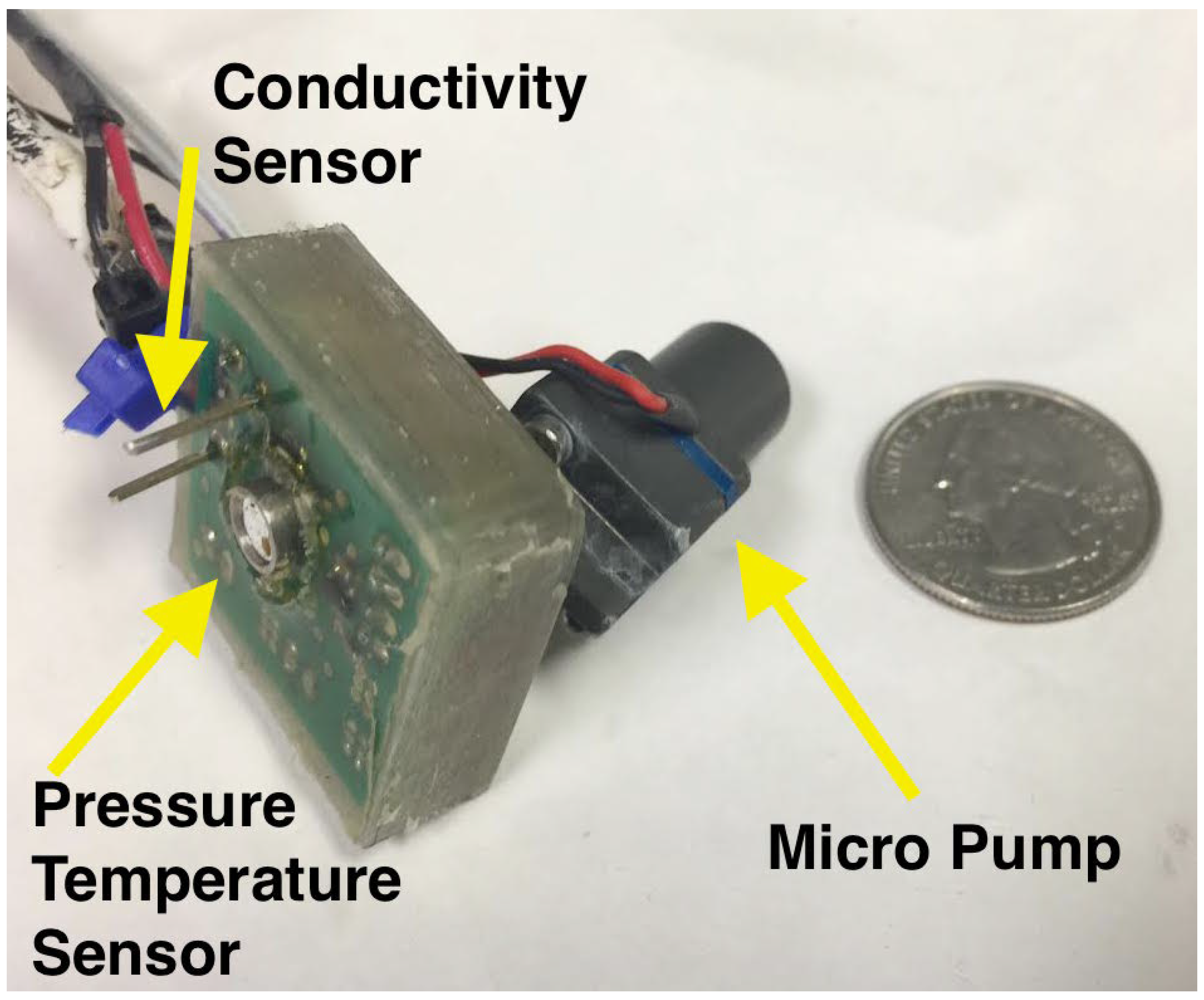
2.2. Vehicle and Sensors


2.3. Flights for Temperature Sampling

2.4. Post-Processing
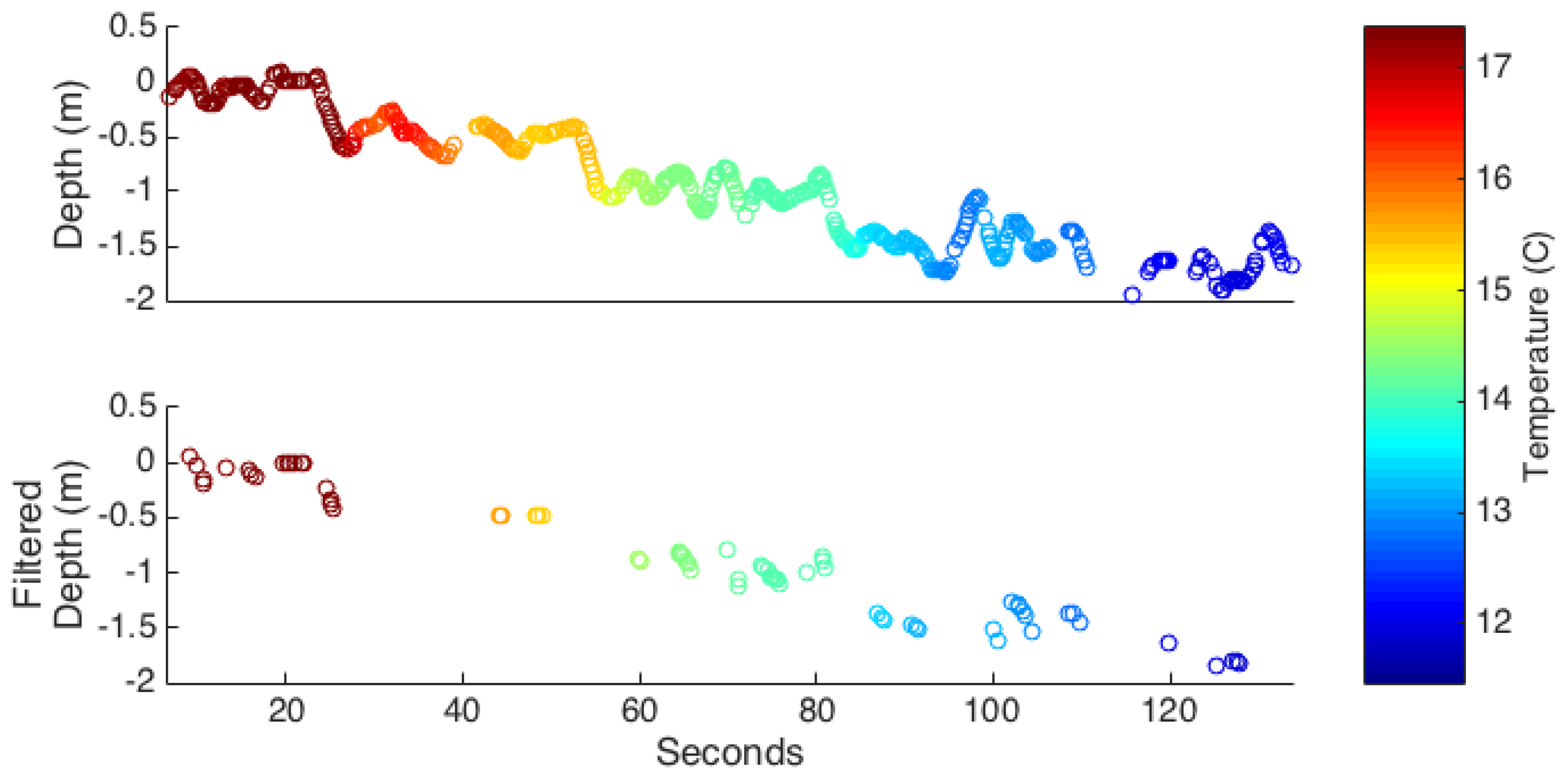
2.4.1. Filtering

2.4.2. Calibration
3. Results and Discussion
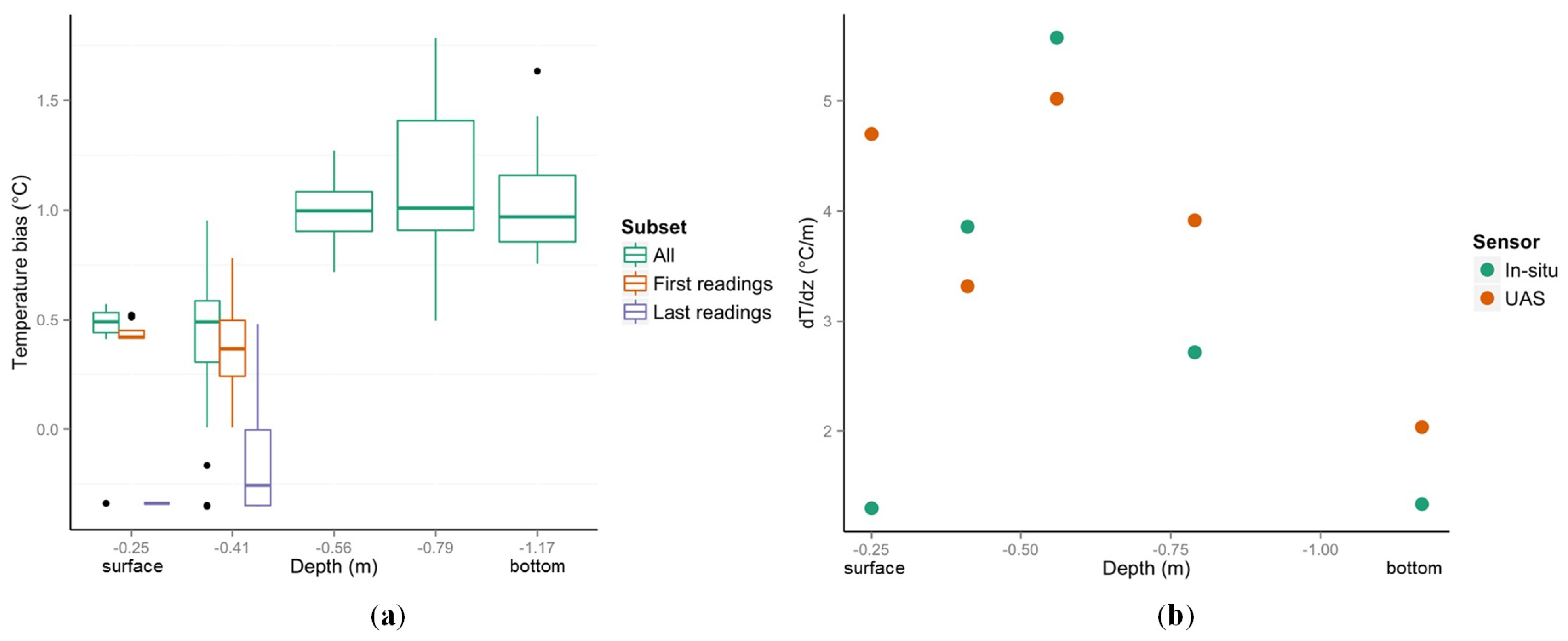
3.1. Comparison of UAS and In Situ Temperature Measurements

3.2. What Water Column Disturbance Is Induced by the UAS?
3.3. Feasibility of Mapping 3D Temperature Structure

3.4. Operational Modes
3.5. Pragmatic Limitations
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Caissie, D. The thermal regime of rivers: A review. Freshw. Biol. 2006, 51, 1389–1406. [Google Scholar] [CrossRef]
- Alabaster, J.S.; Lloyd, R.S. Water Quality Criteria for Freshwater Fish; Elsevier: London, UK, 2013. [Google Scholar]
- Jankowski, T.; Livingstone, D.M.; Buhrer, H.; Forster, R.; Niederhauser, P. Consequences of the 2003 European heat wave for lake temperature profiles, thermal stability, and hypolimnetic oxygen depletion: Implications for a warmer world. Limnol. Oceanogr. 2006, 51, 815–819. [Google Scholar] [CrossRef]
- Mooji, W.M.; Hulsmann, S.; de Senerpont Domis, L.N.; Nolet, B.A.; Bodelier, P.L.E.; Boers, P.C.M.; Pires, M.D.; Gons, H.J.; Ibelines, B.W.; Noordhuis, R.; et al. The impact of climate change on lakes in the Netherlands: A review. Aquat. Ecol. 2005, 39, 381–400. [Google Scholar] [CrossRef]
- Bowler, D.E.; Mant, R.; Orr, H.; Hannah, D.M.; Pullin, A.S. What are the effects of wooded riparian zones on stream temperature? Environ. Evid. 2012, 1, 1–9. [Google Scholar] [CrossRef]
- Vannote, R.L.; Sweeney, B.W. Geographic analysis of thermal equilibria: a conceptual model for evaluating the effect of natural and modified thermal regimes on aquatic insect communities. Am. Nat. 1980, 115, 667–695. [Google Scholar] [CrossRef]
- Ward, J.V.; Stanford, J.A. Thermal responses in the evolutionary ecology of aquatic insects. Annu. Rev. Entomol. 1992, 27, 97–117. [Google Scholar] [CrossRef]
- Wilby, R.L.; Orr, H.; Watts, G.; Battarbee, R.W.; Berry, P.M.; Chadd, R.; Dugdale, S.J.; Dunbar, M.J.; Elliott, J.A.; Extence, C.; et al. Evidence needed to manage freshwater ecosystems in a changing climate: Turning adaptation principles into practice. Sci. Total Environ. 2010, 408, 4150–4164. [Google Scholar] [CrossRef] [PubMed]
- Tonolla, D.; Acuna, V.; Uehlinger, U.; Frank, T.; Tockner, K. Thermal heterogeneity in river floodplains. Ecosystems 2010, 13, 727–740. [Google Scholar] [CrossRef]
- Lewis, Q.W.; Rhoads, B.L. Rates and patterns of thermal mixing at a small stream confluence under variable incoming flow conditions. Hydrol. Process. 2015, 29, 4442–4456. [Google Scholar] [CrossRef]
- Rice, S.P.; Kiffney, P.; Greene, C.; Pess, G.R. The ecological importance of tributaries and confluences. In River Confluences, Tributaries and the Fluvial Network; Rice, S., Roy, A., Rhoads, B., Eds.; John Wiley & Sons: Chichester, UK, 2008. [Google Scholar]
- Ebersole, J.L.; Liss, W.J.; Frissell, C.A. Cold water patches in warm streams: Physicochemical characteristics and the influence of shading. JAWRA J. Am. Water Resour. Assoc. 2003, 39, 355–368. [Google Scholar] [CrossRef]
- Holtby, L.B. Effects of logging on stream temperatures in Carnation Creek, British Columbia, and associated impacts on the coho salmon (Oncorhynchus kisutch). Can. J. Fish. Aquat. Sci. 1988, 45, 502–515. [Google Scholar] [CrossRef]
- Torgersen, C.E.; Price, D.M.; Li, H.W.; McIntosh, B.A. Multiscale thermal refugia and stream habitat associations of chinook salmon in northeastern Oregon. Ecol. Appl. 1999, 9, 301–319. [Google Scholar] [CrossRef]
- Ruesch, A.S.; Torgersen, C.E.; Lawler, J.J.; Olden, J.D.; Peterson, E.E.; Volk, C.J.; Lawrence, D.J. Projected climate-induced habitat loss for salmonids in the John Day River network, Oregon, USA. Conserv. Biol. 2012, 26, 873–882. [Google Scholar] [CrossRef] [PubMed]
- Wüest, A.; Lorke, A. Small-scale hydrodynamics in lakes. Annu. Rev. Fluid Mech. 2003, 35, 373–412. [Google Scholar] [CrossRef]
- Romero, J.R.; Kling, G.W. Spatial-temporal variability in surface layer deepening and lateral advection in an embayment of Lake Victoria, East Africa. Limnol. Oceanogr. 2002, 47, 656–671. [Google Scholar] [CrossRef]
- Oldham, C.E.; Sturman, J.J. The effect of emergent vegetation on convective flushing in shallow wetlands: Scaling and experiments. Limnol. Oceanogr. 2001, 46, 1486–1493. [Google Scholar] [CrossRef]
- Horsch, G.; Stefan, H. Convective circulation in littoral water due to surface cooling. Limnol. Oceanogr. 1988, 33, 1068–1083. [Google Scholar] [CrossRef]
- Michael, C.; John, F. The radiatively driven natural convection beneath a floating plant layer. Limnol. Oceanogr. 1994, 39, 1186–1194. [Google Scholar] [CrossRef]
- Rinke, K.; Huber, A.M.R.; Kempke, S.; Eder, M.; Wolf, T.; Probst, W.N.; Rothhaupta, K.O. Lake-wide distributions of temperature, phytoplankton, zooplankton, and fish in the pelagic zone of a large lake. Limnol. Oceanogr. 2009, 54, 1306–1322. [Google Scholar] [CrossRef]
- Moore, R.D.; Spittlehouse, D.L.; Story, A. Riparian microclimate and stream temperature response to forest harvesting: A review. J. Am. Water Resour. Assoc. 2005, 41, 813–834. [Google Scholar] [CrossRef]
- Selker, J.S.; Thevenaz, L.; Huwald, H.; Mallet, A.; Luxemburg, W.; van de Giesen, N.; Stejskal, M.; Zeman, J.; Westhoff, M.; Parlange, M.B. Distributed fiber-optic temperature sensing for hydrologic systems. Water Resour. Res. 2006, 42, 1–8. [Google Scholar] [CrossRef]
- Torgerson, C.E.; Faux, R.N.; McIntosh, B.A.; Poage, N.J.; Norton, D.J. Airborne thermal remote sensing for water temperature assessment in rivers and streams. Remote Sens. Environ. 2001, 76, 386–398. [Google Scholar] [CrossRef]
- Handcock, R.N.; Gillespie, A.R.; Cherkauer, K.A.; Kay, J.E.; Burges, S.J.; Kampf, S.K. Accuracy and uncertainty of thermal-infrared remote sensing of stream temperatures at multiple spatial scales. Remote Sens. Environ. 2006, 100, 427–440. [Google Scholar] [CrossRef]
- Jensen, A.M.; Neilson, B.T.; McKee, M.; Chen, Y. Thermal remote sensing with an autonomous unmanned aerial remote sensing platform for surface stream temperatures. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5049–5052.
- Schmugge, T.J.; Kustas, W.P.; Ritchie, J.C.; Jackson, T.J.; Rango, A. Remote sensing in hydrology. Adv. Water Resour. 2002, 25, 1367–1385. [Google Scholar] [CrossRef]
- Kay, J.E.; Kampf, S.K.; Handcock, R.N.; Cherkauer, K.A.; Gillespie, A.R.; Burges, S.J. Accuracy of lake and stream temperatures estimated from thermal infrared images. J. Am. Water Resour. Assoc. 2005, 41, 1161–1175. [Google Scholar] [CrossRef]
- Dunbabin, M.; Grinham, A.; Udy, J. An autonomous surface vehicle for water quality monitoring. In Proceedings of the Australasian Conference on Robotics and Automation (ACRA), Sydney, Australia, 2–4 December 2009; pp. 2–4.
- Laval, B.; Bird, J.S.; Helland, P.D. An autonomous underwater vehicle for the study of small lakes. J. Atmos. Ocean. Technol. 2000, 17, 69–76. [Google Scholar] [CrossRef]
- Zhang, Y.; Godin, M.A.; Bellingham, J.G.; Ryan, J.P. Using an autonomous underwater vehicle to track a coastal upwelling front. IEEE J. Ocean. Eng. 2012, 37, 338–347. [Google Scholar] [CrossRef]
- Marouchos, A.; Muir, B.; Babcock, R.; Dunbabin, M. A shallow water AUV for benthic and water column observations. In Proceedings of the OCEANS 2015—Genova, Genoa, Italy, 18–21 May 2015; pp. 1–7.
- Zhang, F.; Wang, J.; Thon, J.; Thon, C.; Litchman, E.; Tan, X. Gliding robotic fish for mobile sampling of aquatic environments. In Proceedings of the IEEE 11th International Conference on Networking, Sensing and Control, Miami, FL, USA, 7–9 April 2014; pp. 167–172.
- Ore, J.P.; Elbaum, S.; Burgin, A.; Detweiler, C. Autonomous Aerial Water Sampling. J. Field Robot. 2015. [Google Scholar] [CrossRef]
- Hardin, P.J.; Jensen, R.R. Small-scale unmanned aerial vehicles in environmental remote sensing: Challenges and opportunities. GISci. Remote Sens. 2011, 48, 99–111. [Google Scholar] [CrossRef]
- Dunbabin, M.; Marques, L. Robots for environmental monitoring: Significant advancements and applications. IEEE Robot. Autom. Mag. 2012, 19, 24–39. [Google Scholar] [CrossRef]
- Achtelik, M.C.; Doth, K.M.; Gurdan, D.; Stumpf, J. Design of a Multi Rotor MAV with regard to Efficiency, Dynamics and Redundancy. In Proceedings of the AIAA Guidance, Navigation, and Control Conference (AIAA), Minneapolis, MN, USA, 13–16 August 2012; pp. 1–17.
- Tyler, S.W.; Selker, J.S.; Hausner, M.B.; Hatch, C.E.; Torgerson, T.; Thodal, C.E.; Schladow, S.G. Environmental temperature sensing using Raman spectra DTS fiber-optic methods. Water Resour. Res. 2009, 45. [Google Scholar] [CrossRef] [Green Version]
- Garnier, B.; Lanzetta, F. Tutorial 4: In situ Realization/Characterization of Temperature/Heat Flux Sensors; Technical Report; Université de Nantes: Nantes, France, 2011. [Google Scholar]
- Mulero-Pázmány, M.; Stolper, R.; van Essen, L.; Negro, J.J.; Sassen, T. Remotely piloted aircraft systems as a rhinoceros anti-poaching tool in Africa. PLoS ONE 2014, 9. [Google Scholar] [CrossRef]
- Vincent, J.B.; Werden, L.K.; Ditmer, M.A. Barriers to adding UAVs to the ecologist’s toolbox: Peer-reviewed letter. Front. Ecol. Environ. 2015, 13, 74–75. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 1: A review of progress and challenges. J. Unmanned Veh. Syst. 2014, 2, 69–85. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chung, M.; Detweiler, C.; Hamilton, M.; Higgins, J.; Ore, J.-P.; Thompson, S. Obtaining the Thermal Structure of Lakes from the Air. Water 2015, 7, 6467-6482. https://doi.org/10.3390/w7116467
Chung M, Detweiler C, Hamilton M, Higgins J, Ore J-P, Thompson S. Obtaining the Thermal Structure of Lakes from the Air. Water. 2015; 7(11):6467-6482. https://doi.org/10.3390/w7116467
Chicago/Turabian StyleChung, Michaella, Carrick Detweiler, Michael Hamilton, James Higgins, John-Paul Ore, and Sally Thompson. 2015. "Obtaining the Thermal Structure of Lakes from the Air" Water 7, no. 11: 6467-6482. https://doi.org/10.3390/w7116467
APA StyleChung, M., Detweiler, C., Hamilton, M., Higgins, J., Ore, J. -P., & Thompson, S. (2015). Obtaining the Thermal Structure of Lakes from the Air. Water, 7(11), 6467-6482. https://doi.org/10.3390/w7116467