
Integration of a Three-Dimensional Process-Based Hydrological Model into the Object Modeling System




Abstract
:1. Introduction
2. Methods
2.1. The Object Modeling System (OMS)


2.2. The GEOtop Model
2.3. Integration of GEOtop with OMS
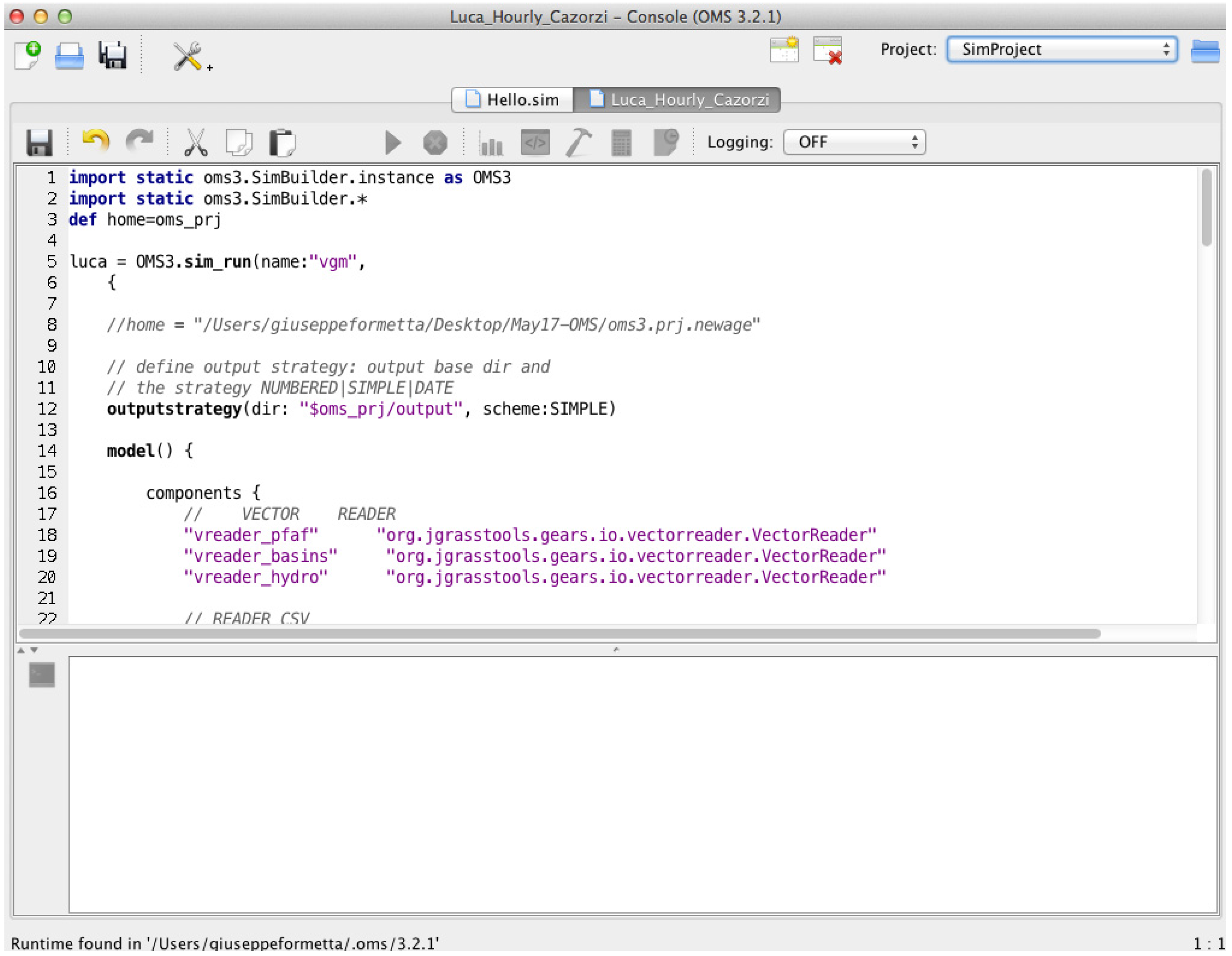
- Create a template of the Model.input file, where each model parameter is assigned a value that can be accessed and modified. This is performed by the OMS keyword Param_name=${Param_value}, which dynamically substitutes the Param_name with the parameter Param_value.
- Create a Java class named ModelRun.java that receives model parameters as input, creates a new Model.input file by using the template (point 1), and executes the model.
2.4. Goals of Integration

3. Case Study of a GEOtop Application in OMS

3.1. Model Setup
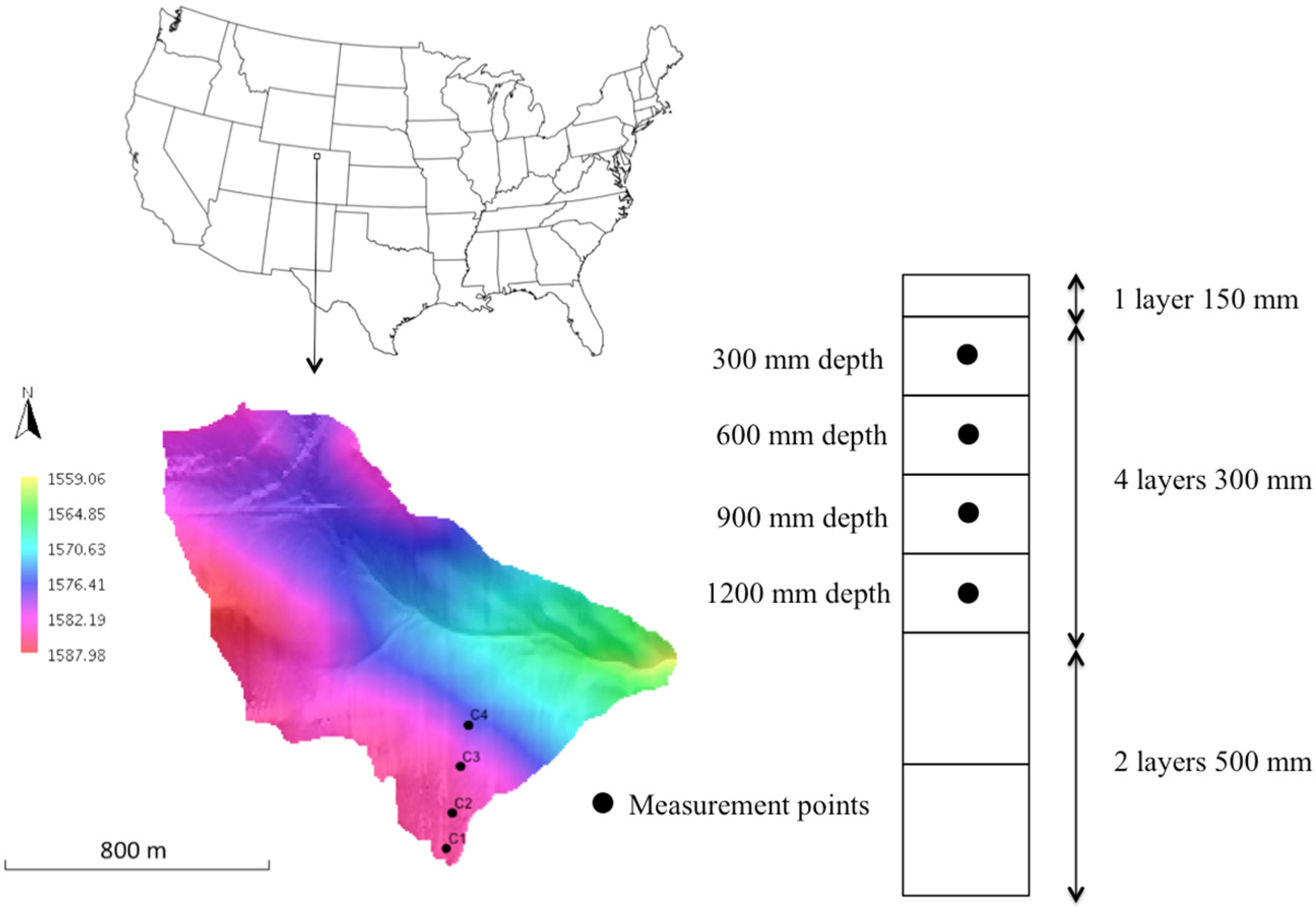
- A digital elevation model of the area with 5-m horizontal grid spacing;
- one year (1 September 2002 to 31 August 2003) of measured daily rainfall, air temperature, relative humidity, and incoming solar radiation;
- Soil-specific hydraulic and geotechnical parameters such as saturated and residual water content, lateral and vertical hydraulic conductivity, and van Genuchten and Mualem parameters of the soil water characteristic curve, represented by eight layers as shown in Figure 4;
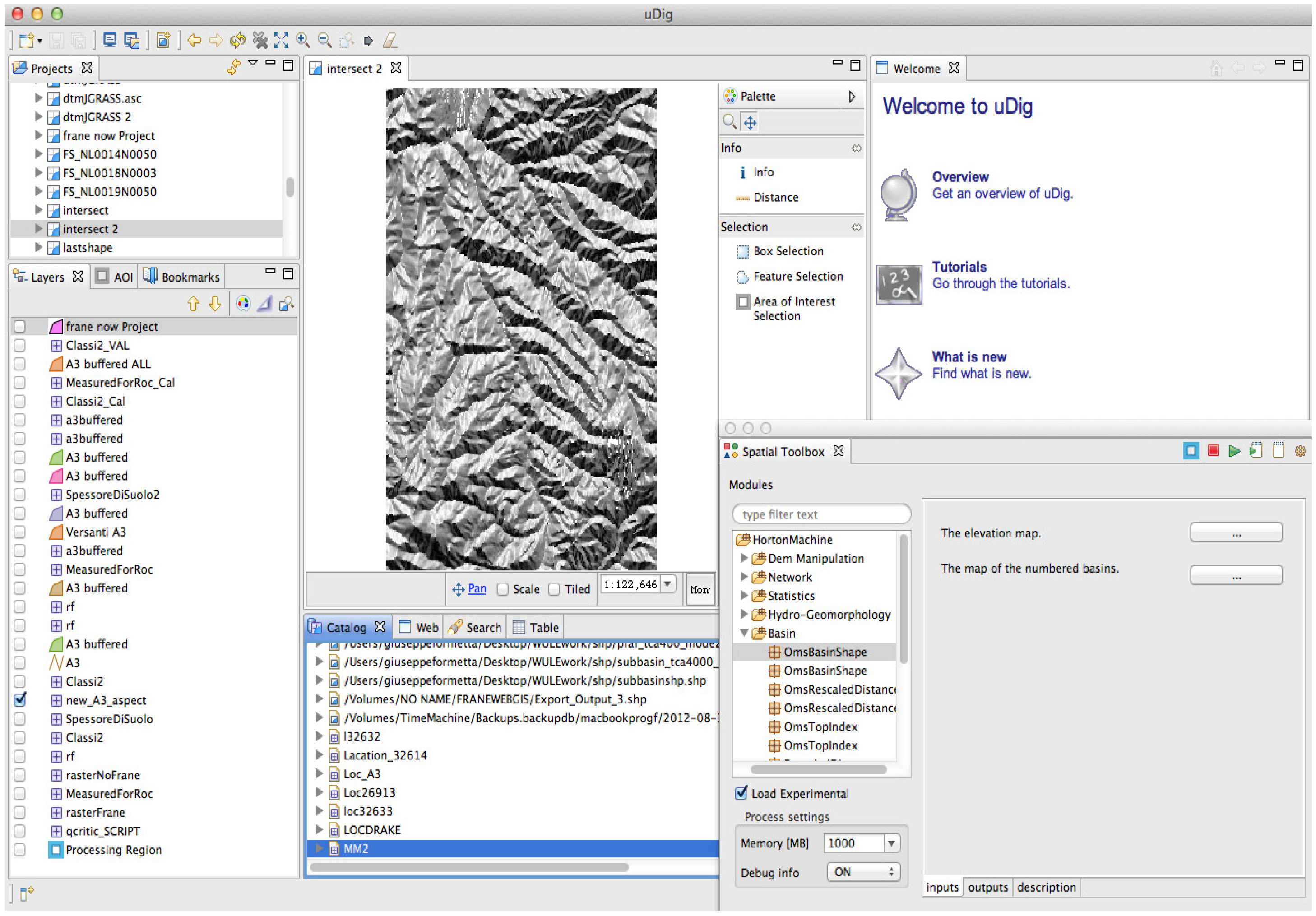
- GEOtop input maps (slope, aspect, and sky view factor) created with OMS simulation scripts using uDig geo-processing components.
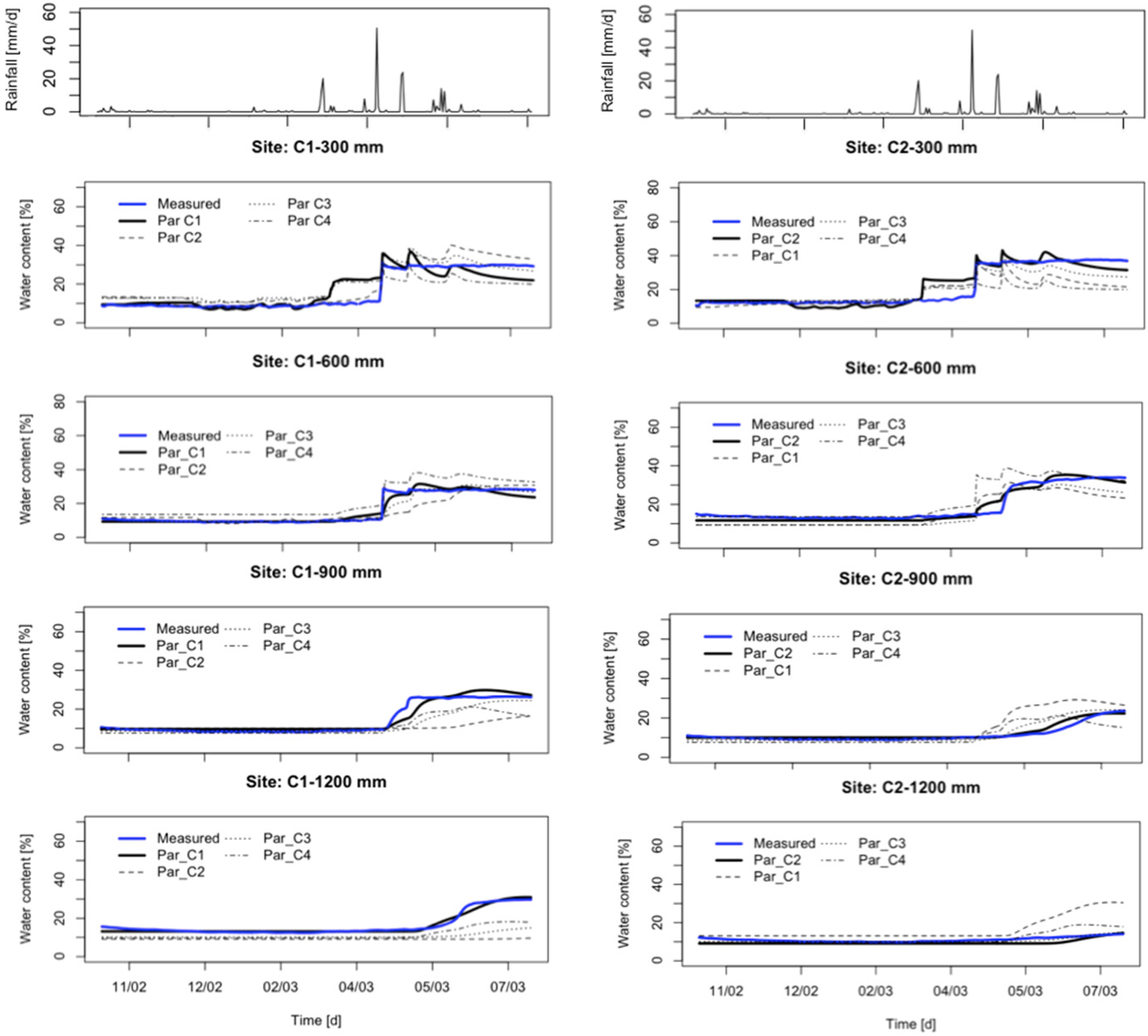
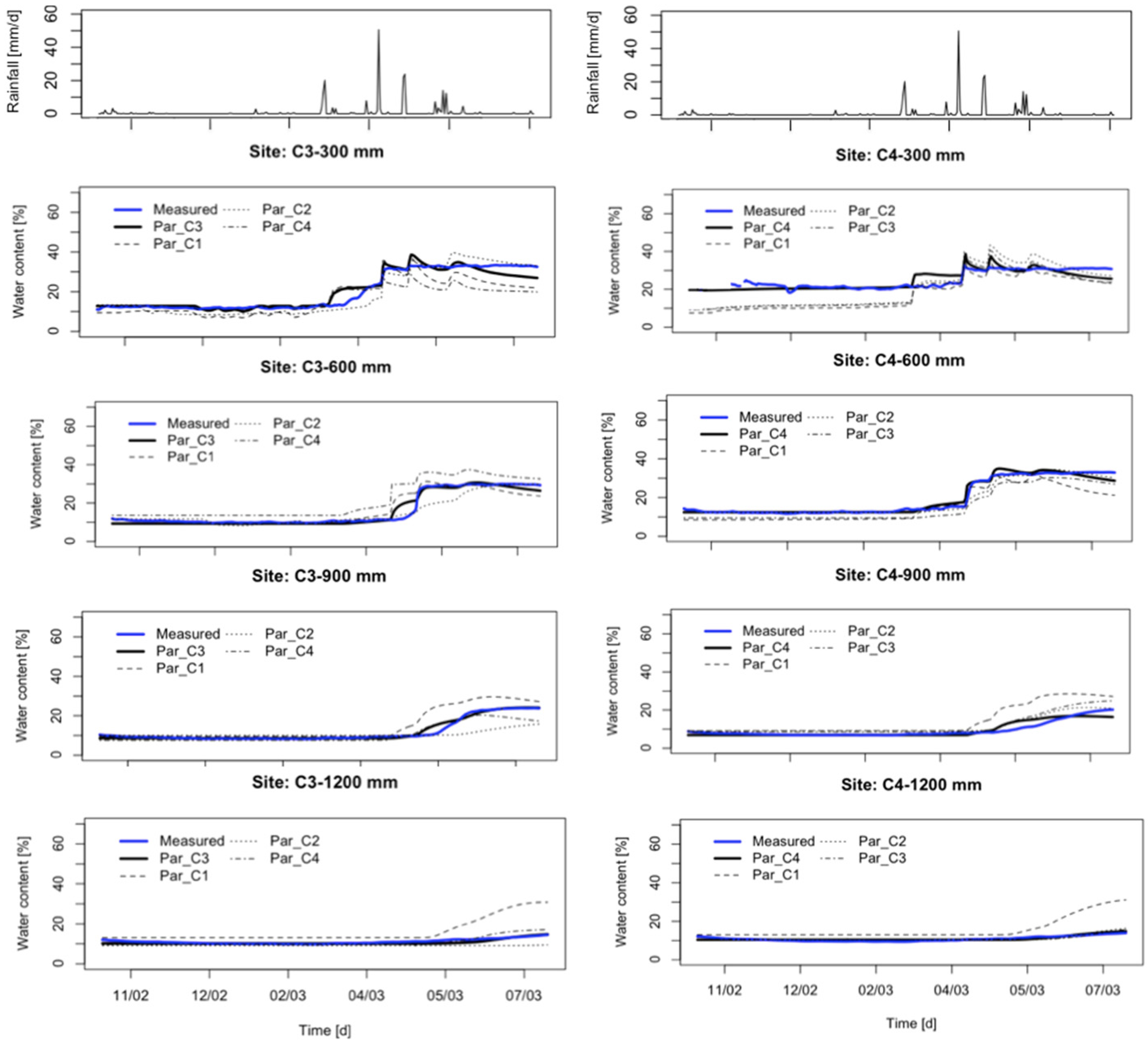
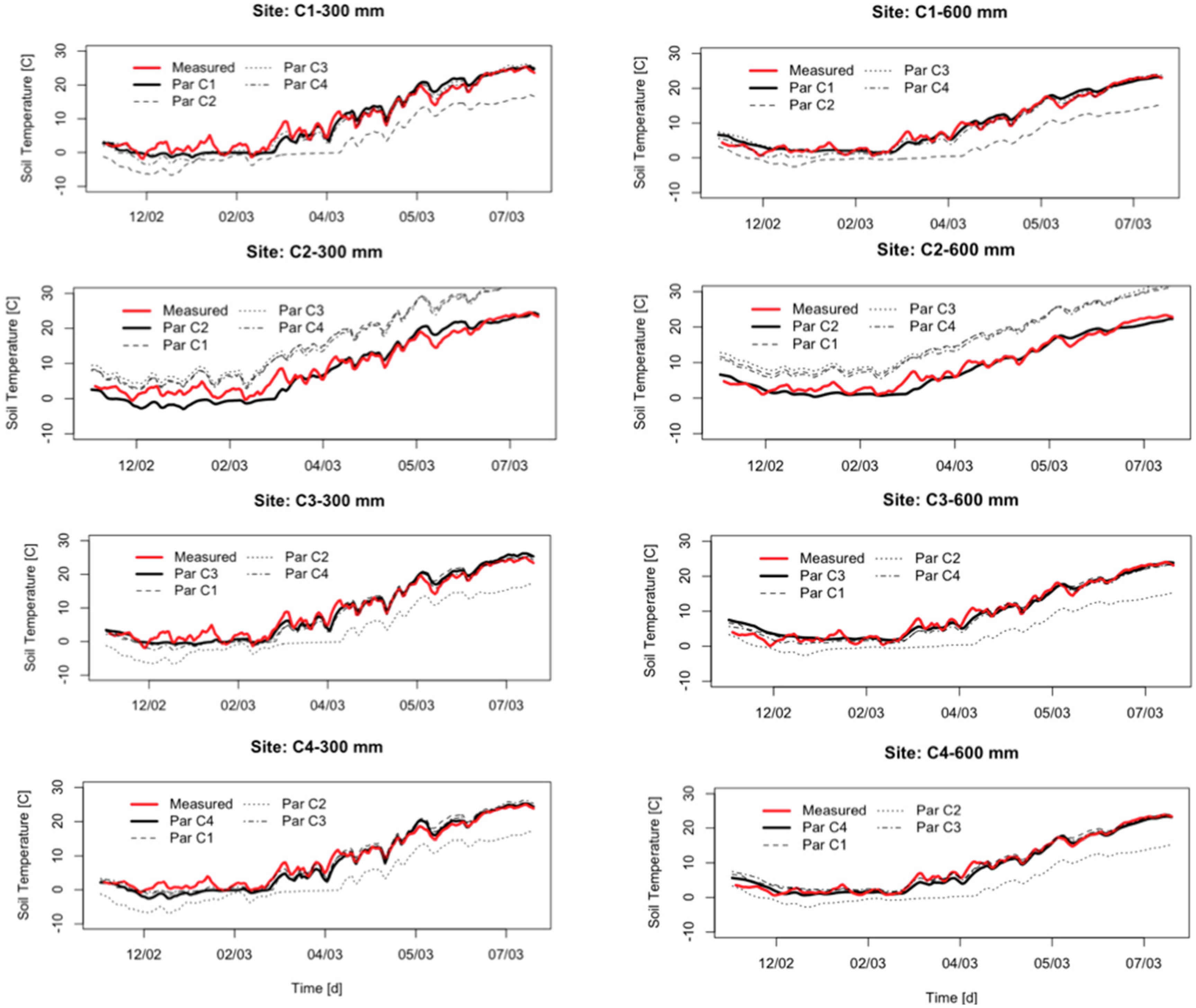
3.2. Model Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dz (mm) | Kh (mm/s) | Kv (mm/s) | θr | θs | α (m−1) | n (-) |
|---|---|---|---|---|---|---|
| Par_C1 | ||||||
| 150 | 0.029 | 0.061 | 0.061 | 0.533 | 5.4 | 1.819 |
| 450 | 0.076 | 0.027 | 0.061 | 0.570 | 4.0 | 1.474 |
| 750 | 0.055 | 0.053 | 0.044 | 0.539 | 5.2 | 1.384 |
| 1050 | 0.054 | 0.023 | 0.066 | 0.550 | 5.6 | 1.455 |
| 1350 | 0.049 | 0.019 | 0.071 | 0.536 | 5.9 | 1.340 |
| 1850 | 0.045 | 0.039 | 0.069 | 0.478 | 4.0 | 1.556 |
| 2350 | 0.083 | 0.055 | 0.052 | 0.528 | 3.6 | 1.246 |
| Par_C2 | ||||||
| 150 | 0.031 | 0.005 | 0.070 | 0.519 | 2.1 | 1.148 |
| 450 | 0.061 | 0.015 | 0.067 | 0.577 | 3.5 | 1.337 |
| 750 | 0.045 | 0.021 | 0.066 | 0.580 | 6.0 | 1.351 |
| 1050 | 0.051 | 0.032 | 0.087 | 0.473 | 5.0 | 1.529 |
| 1350 | 0.023 | 0.074 | 0.087 | 0.448 | 3.3 | 1.758 |
| 1850 | 0.054 | 0.061 | 0.018 | 0.499 | 4.3 | 1.368 |
| 2350 | 0.078 | 0.048 | 0.086 | 0.449 | 3.4 | 1.740 |
| Par_C3 | ||||||
| 150 | 0.067 | 0.028 | 0.028 | 0.560 | 4.8 | 1.269 |
| 450 | 0.065 | 0.063 | 0.070 | 0.583 | 3.3 | 1.346 |
| 750 | 0.084 | 0.017 | 0.055 | 0.519 | 3.6 | 1.392 |
| 1050 | 0.049 | 0.014 | 0.067 | 0.503 | 5.1 | 1.469 |
| 1350 | 0.039 | 0.043 | 0.098 | 0.490 | 4.6 | 1.731 |
| 1850 | 0.027 | 0.088 | 0.055 | 0.530 | 4.8 | 1.199 |
| 2350 | 0.014 | 0.056 | 0.084 | 0.483 | 2.9 | 1.534 |
| Par_C4 | ||||||
| 150 | 0.095 | 0.036 | 0.038 | 0.497 | 2.7 | 1.198 |
| 450 | 0.044 | 0.049 | 0.095 | 0.434 | 3.8 | 1.366 |
| 750 | 0.067 | 0.021 | 0.076 | 0.565 | 1.4 | 1.387 |
| 1050 | 0.032 | 0.031 | 0.073 | 0.525 | 5.6 | 1.764 |
| 1350 | 0.078 | 0.082 | 0.095 | 0.523 | 4.5 | 1.849 |
| 1850 | 0.033 | 0.006 | 0.044 | 0.568 | 5.0 | 1.438 |
| 2350 | 0.010 | 0.032 | 0.038 | 0.421 | 6.4 | 1.243 |
| Measure of Fit | KGE | RMSE | ||||||
|---|---|---|---|---|---|---|---|---|
| Parameter Set | Par_C1 | Par_C2 | Par_C3 | Par_C4 | Par_C1 | Par_C2 | Par_C3 | Par_C4 |
| SM_C1_300 | 0.84 | 0.74 | 0.73 | 0.50 | 5.02 | 4.03 | 5.12 | 6.33 |
| SM_C1_600 | 0.96 | 0.82 | 0.91 | 0.63 | 2.10 | 4.30 | 2.40 | 5.73 |
| SM_C1_900 | 0.95 | 0.11 | 0.63 | 0.52 | 2.20 | 7.64 | 4.50 | 4.80 |
| SM_C1_1200 | 0.98 | −0.13 | 0.14 | 0.43 | 1.08 | 9.00 | 7.14 | 5.63 |
| ST_C1_300 | 0.86 | 0.36 | 0.87 | 0.78 | 1.86 | 6.42 | 1.56 | 2.19 |
| ST_C1_600 | 0.97 | 0.39 | 0.94 | 0.89 | 1.21 | 5.77 | 1.32 | 1.40 |
| SM_C2_300 | 0.58 | 0.91 | 0.72 | 0.32 | 7.30 | 4.61 | 4.65 | 9.32 |
| SM_C2_600 | 0.79 | 0.91 | 0.81 | 0.75 | 5.15 | 2.16 | 4.19 | 5.43 |
| SM_C2_900 | 0.06 | 0.92 | 0.55 | 0.56 | 6.19 | 1.23 | 2.62 | 3.85 |
| SM_C2_1200 | −3.08 | 0.72 | 0.82 | −0.55 | 7.02 | 1.71 | 1.88 | 2.35 |
| ST_C2_300 | 0.23 | 0.79 | 0.20 | 0.28 | 7.47 | 2.57 | 7.70 | 6.85 |
| ST_C2_600 | 0.25 | 0.91 | 0.21 | 0.30 | 7.10 | 1.54 | 7.44 | 6.50 |
| SM_C3_300 | 0.80 | 0.79 | 0.93 | 0.49 | 5.21 | 3.26 | 2.63 | 6.60 |
| SM_C3_600 | 0.91 | 0.83 | 0.96 | 0.65 | 3.34 | 3.03 | 1.94 | 6.15 |
| SM_C3_900 | 0.50 | 0.25 | 0.98 | 0.80 | 4.54 | 4.36 | 1.08 | 2.37 |
| SM_C3_1200 | −2.79 | −0.03 | 0.85 | 0.07 | 6.65 | 2.23 | 0.76 | 1.34 |
| ST_C3_300 | 0.85 | 0.36 | 0.90 | 0.84 | 1.90 | 6.36 | 1.54 | 1.90 |
| ST_C3_600 | 0.94 | 0.37 | 0.96 | 0.91 | 1.32 | 6.05 | 1.33 | 1.44 |
| SM_C4_300 | 0.15 | −0.33 | 0.17 | 0.65 | 9.67 | 9.61 | 7.07 | 7.90 |
| SM_C4_600 | 0.80 | 0.69 | 0.80 | 0.94 | 3.95 | 5.88 | 4.08 | 1.76 |
| SM_C4_900 | −0.18 | 0.35 | 0.50 | 0.93 | 7.05 | 2.80 | 3.17 | 1.19 |
| SM_C4_1200 | −2.44 | −0.05 | 0.79 | 0.81 | 6.63 | 2.12 | 0.77 | 0.96 |
| ST_C4_300 | 0.85 | 0.35 | 0.89 | 0.85 | 1.74 | 6.32 | 1.31 | 1.68 |
| ST_C4_600 | 0.95 | 0.37 | 0.96 | 0.94 | 1.18 | 5.86 | 1.23 | 1.12 |



4. Conclusions
- (1)
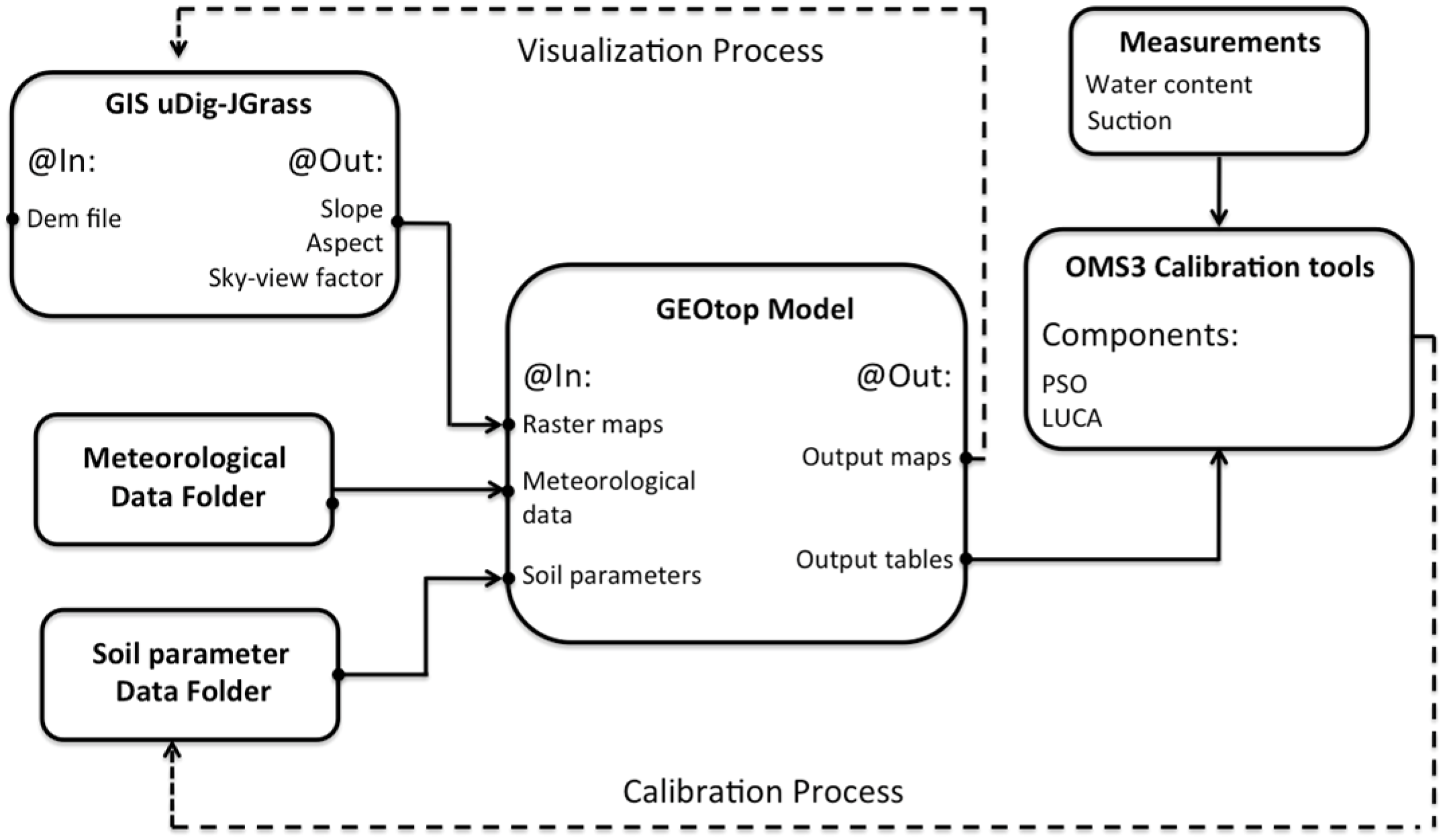
- The uDig GIS was used to compute input maps and provide output visualization for GEOtop (Figure 2).
- (2)
- The GEOtop model was linked to OMS to execute automatic calibration, sensitivity analysis, and meteorological interpolation tools.
- (3)
- Integrating GEOtop into OMS enhanced the modeling library, which includes other lumped and semi-distributed hydrological models such as PRMS, AgES-W, and NewAge. Modelers may select the appropriate model according to their needs and the processes to be simulated.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
!*******************************
!******* CONFIGURATION *********
!*******************************
TimeStepEnergyAndWater = ${TimeStepEnergyAndWater_value}
InitDateDDMMYYYYhhmm = ${InitDateDDMMYYYYhhmm_value}
EndDateDDMMYYYYhhmm = ${EndDateDDMMYYYYhhmm_value}
EnergyBalance =${EnergyBalance_value}
WaterBalance = ${WaterBalance_value}
!*******************************
!********* GEOGRAPHY ***********
!*******************************
Latitude = ${Latitude_value}
Longitude = ${Longitude_value}
!*******************************
!****** METEO STATIONS *********
!*******************************
NumberOfMeteoStations= ${NumberOfMeteoStations_value}
MeteoStationCoordinateX= ${MeteoStationCoordinateX_value}
MeteoStationCoordinateY= ${MeteoStationCoordinateY_value}
MeteoStationElevation= ${MeteoStationElevation_value}
!*******************************
!**** BOUNDARY AND INITIAL *****
!****** CONDITION STATIONS *****
!*******************************
InitWaterTableHeightOverTopoSurface= ${InitWaterTableHeightOverTopoSurface_value}
FreeDrainageAtLateralBorder= ${FreeDrainageAtLateralBorder_value}
FreeDrainageAtBottom= ${FreeDrainageAtBottom_value}
!*******************************
!******* INPUT MAPS ************
!*******************************
DemFile = ${DemFile_value}
MeteoFile = ${MeteoFile_value}
LandCoverMapFile = ${LandCoverMapFile_value}
SkyViewFactorMapFile = ${SkyViewFactorMapFile_value}
SlopeMapFile = ${SlopeMapFile_value}
AspectMapFile = ${AspectMapFile_value}
RiverNetwork = ${RiverNetwork_value}
Appendix B
References
- Freeze, R.A.; Harlan, R.L. Blueprint for a physically-based, digitally-simulated hydrologic response model. J. Hydrol. 1969, 9, 237–258. [Google Scholar] [CrossRef]
- Abbott, M.B.; Bathurst, J.C.; Cunge, J.A.; O’connell, P.E.; Rasmussen, J. An introduction to the European Hydrological System—Systeme Hydrologique Europeen,“SHE”, 2: Structure of a physically-based, distributed modelling system. J. Hydrol. 1986, 87, 61–77. [Google Scholar] [CrossRef]
- Maxwell, R.M.; Putti, M.; Meyerhoff, S.; Delfs, J.-O.; Ferguson, I.M.; Ivanov, V.; Kim, J.; Kolditz, O.; Kollet, S.J.; Kumar, M.; et al. Surface-subsurface model intercomparison: A first set of benchmark results to diagnose integrated hydrology and feedbacks. Water Resour. Res. 2014, 50, 1531–1549. [Google Scholar] [CrossRef]
- Furman, A. Modeling coupled surface-subsurface flow processes: A review. Vadose Zone J. 2008, 7, 741–756. [Google Scholar] [CrossRef]
- Paniconi, C.; Marrocu, M.; Putti, M.; Verbunt, M. Newtonian nudging for a Richards equation-based distributed hydrological model. Adv. Water Resour. 2003, 26, 161–178. [Google Scholar] [CrossRef]
- Garrote, L.; Bras, R.L. A Distributed Model for Real-time Flood Forecasting using Digital Elevation Models. J. Hydrol. 1995, 167, 279–306. [Google Scholar] [CrossRef]
- Zehe, E.; Blöschl, G. Predictability of hydrologic response at the plot and catchment scales: Role of initial conditions. Water Resour. Res. 2004, 40. [Google Scholar] [CrossRef]
- Rigon, R.; Bertoldi, G.; Over, T.M. GEOtop: A distributed hydrological model with coupled water and energy budgets. J. Hydrometeorol. 2006, 7, 371–388. [Google Scholar] [CrossRef]
- Wang, L.; Koike, T.; Yang, K.; Yeh, P.J.F. Assessment of a distributed biosphere hydrological model against streamflow and MODIS land surface temperature in the upper Tone River Basin. J. Hydrol. 2009, 377, 21–34. [Google Scholar] [CrossRef]
- Niu, G.-Y.; Paniconi, C.; Troch, P.A.; Scott, R.L.; Durcik, M.; Zeng, X.; Huxman, T.; Goodrich, D.C. An integrated modelling framework of catchment-scale ecohydrological processes: 1. Model description and tests over an energy-limited watershed. Ecohydrology 2014, 7, 427–429. [Google Scholar] [CrossRef]
- Endrizzi, S.; Gruber, S.; Dall’Amico, M.; Rigon, R. GEOtop 2.0: Simulating the combined energy and water balance at and below the land surface accounting for soil freezing, snow cover and terrain effects. Geosci. Model Dev. Discuss. 2013, 6, 6279–6341. [Google Scholar] [CrossRef]
- David, O.; Ascough, J.C.; Lloyd, W.; Green, T.R.; Rojas, K.W.; Leavesley, G.H.; Ahuja, L.R. A software engineering perspective on environmental modeling framework design: The Object Modeling System. Environ. Model. Softw. 2013, 39, 201–213. [Google Scholar] [CrossRef]
- Formetta, G.; Antonello, A.; Franceschi, S.; David, O.; Rigon, R. Hydrological modelling with components: A GIS-based open-source framework. Environ. Model. Softw. 2014, 55, 190–200. [Google Scholar] [CrossRef]
- Green, T.R.; Erskine, R.H.; Coleman, M.L.; David, O.; Ascough, J.C.; Kipka, H. The AgroEcoSystem (AgES) response-function model simulates layered soil-water dynamics in semi-arid Colorado: Sensitivity and calibration. Vadose Zone J. 2015, 14. [Google Scholar] [CrossRef]
- Ascough, J.C.; David, O.; Krause, P.; Heathman, G.C.; Kralisch, S.; Larose, M.; Ahuja, L.R.; Kipka, H. Development and application of a modular watershed-scale hydrologic model using the Object Modeling System: Runoff response evaluation. Trans. ASABE 2012, 55, 117–135. [Google Scholar] [CrossRef]
- David, O.; Markstrom, S.; Rojas, K.; Ahuja, L.; Schneider, I. The Object Modeling System, Agricultural System Models in Field Research and Technology Transfer; CRC Press: Boca Raton, FL USA, 2002; pp. 317–331. [Google Scholar]
- Formetta, G.; Mantilla, R.; Franceschi, S.; Antonello, A.; Rigon, R. The JGrass-Newage system for forecasting and managing the hydrological budgets at the basin scale: Models of flow generation and propagation/routing. Geosci. Model Dev. 2011, 4, 943–955. [Google Scholar] [CrossRef]
- Leavesley, G.H.; Markstrom, S.L.; Viger, R.J. USGS Modular Modeling System (MMS)-Precipitation-Runoff Modeling System (PRMS). In Watershed Models; CRC Press: Boca Raton, FL, USA, 2006; pp. 159–177. [Google Scholar]
- Formetta, G.; Rigon, R.; Chávez, J.L.; David, O. Modeling shortwave solar radiation using the JGrass-NewAge system. Geosci. Model Dev. 2013, 6, 915–928. [Google Scholar] [CrossRef]
- Lloyd, W.; David, O.; Ascough, J.C.; Rojas, K.W.; Carlson, J.R.; Leavesley, G.H.; Krause, P.; Green, T.R.; Ahuja, L.R. Environmental modeling framework invasiveness: Analysis and implications. Environ. Model. Softw. 2011, 26, 1240–1250. [Google Scholar] [CrossRef]
- Panday, S.; Huyakorn, P.S. A fully coupled physically-based spatially-distributed model for evaluating surface/subsurface flow. Adv. Water Resour. 2004, 27, 361–382. [Google Scholar] [CrossRef]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-view factor as a relief visualization technique. Remote Sens. 2012, 3, 398–415. [Google Scholar] [CrossRef]
- Bertoldi, G.; Rigon, R.; Over, T.M. Impact of watershed geomorphic characteristics on the energy and water budgets. J. Hydrometeorol. 2006, 7, 389–403. [Google Scholar] [CrossRef]
- Gubler, S.; Endrizzi, S.; Gruber, S.; Purves, R.S. Sensitivities and uncertainties of modeled ground temperatures in mountain environments. Geosci. Model Dev. 2013, 6, 1319–1336. [Google Scholar] [CrossRef]
- Dall’Amico, M.; Endrizzi, S.; Gruber, S.; Rigon, R. An energy-conserving model of freezing variably-saturated soil. Cryosphere 2011, 5, 469–484. [Google Scholar] [CrossRef] [Green Version]
- Doherty, J.E.; Hunt, R.J. Approaches to Highly Parameterized Inversion: A Guide to Using PEST for Groundwater-Model Calibration; U.S. Department of the Interior, U.S. Geological Survey: Reston, VA, USA, 2010.
- Poeter, E.P.; Hill, M.C. UCODE, a computer code for universal inverse modeling. Comput. Geosci. 1999, 25, 457–462. [Google Scholar] [CrossRef]
- Banta, E.R.; Poeter, E.P.; Doherty, J.E.; Hill, M.C. JUPITER: Joint Universal Parameter Identification and Evaluation of Reliability—An Application Programming Interface (API) for Model Analysis; U.S. Geological Survey: Reston, VA, USA, 2006.
- Hay, L.E.; Leavesley, G.H.; Clark, M.P.; Markstrom, S.L.; Viger, R.J.; Umemoto, M. Step-Wise, Multiple-Objective Calibration of a Hydrologic Model for a Snowmelt-Dominated Basin. J. Am. Water Resour. Assoc. 2006, 42, 877–890. [Google Scholar] [CrossRef]
- Duan, Q.; Sorooshian, S.; Gupta, V. Effective and efficient global optimization for conceptual rainfall-runoff models. Water Resour. Res. 1992, 28, 1015–1031. [Google Scholar] [CrossRef]
- Erskine, R.H.; Green, T.R.; Ramirez, J.A.; MacDonald, L. Comparison of grid-based algorithms for computing upslope contributing area. Water Resour. Res. 2006, 42. [Google Scholar] [CrossRef]
- Green, T.R.; Dunn, G.H.; Erskine, R.H.; Salas, J.D.; Ahuja, L.R. Fractal analyses of steady infiltration and terrain on an undulating agricultural field. Vadose Zone J. 2009, 8, 310–320. [Google Scholar] [CrossRef]
- Green, T.R.; Erskine, R.H. Measurement and inference of profile soil-water dynamics at different hillslope positions in a semiarid agricultural watershed. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef]
- Fang, Q.X.; Green, T.R.; Liwang, M.; Erskine, R.H.; Malone, R.W.; Ahuja, L.R. Optimizing soil hydraulic parameters in RZWQM2 under fallow conditions. Soil Sci. Soc. Am. J. 2010, 74, 1887–1993. [Google Scholar] [CrossRef]
- McMaster, G.S.; Green, T.R.; Erskine, R.H.; Edmunds, D.A.; Ascough, J.C. Interrelationships between wheat phenology, thermal time, and landscape position. Agron. J. 2012, 104, 1110–1121. [Google Scholar] [CrossRef]
- Kipka, H.; Green, T.R.; David, O.; Garcia, L.A.; Ascough, J.C.; Arabi, M. Development of the Land-use and Agricultural Management Practice web-Service (LAMPS) for generating crop rotations in space and time. Soil Tillage Res. 2016, 155, 233–249. [Google Scholar] [CrossRef]
- Schwank, M.; Green, T.R.; Mätzler, C.; Benedickter, H.; Flühler, H. Laboratory characterization of a commercial capacitance sensor for estimating permittivity and inferring soil water content. Vadose Zone J. 2006, 5, 1048–1064. [Google Scholar] [CrossRef]
- Gupta, H.; Kling, H.; Yilmaz, K.; Martinez, G. Decomposition of the mean squared error and NSE performance criteria: Implications for improving hydrological modelling. J. Hydrol. 2009, 377, 80–91. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Formetta, G.; Capparelli, G.; David, O.; Green, T.R.; Rigon, R. Integration of a Three-Dimensional Process-Based Hydrological Model into the Object Modeling System. Water 2016, 8, 12. https://doi.org/10.3390/w8010012
Formetta G, Capparelli G, David O, Green TR, Rigon R. Integration of a Three-Dimensional Process-Based Hydrological Model into the Object Modeling System. Water. 2016; 8(1):12. https://doi.org/10.3390/w8010012
Chicago/Turabian StyleFormetta, Giuseppe, Giovanna Capparelli, Olaf David, Timothy R. Green, and Riccardo Rigon. 2016. "Integration of a Three-Dimensional Process-Based Hydrological Model into the Object Modeling System" Water 8, no. 1: 12. https://doi.org/10.3390/w8010012
APA StyleFormetta, G., Capparelli, G., David, O., Green, T. R., & Rigon, R. (2016). Integration of a Three-Dimensional Process-Based Hydrological Model into the Object Modeling System. Water, 8(1), 12. https://doi.org/10.3390/w8010012