
Soft Measurement Modeling Based on Chaos Theory for Biochemical Oxygen Demand (BOD)

Abstract
:1. Introduction
2. Methods
2.1. Chaotic Characteristic Analysis Methods
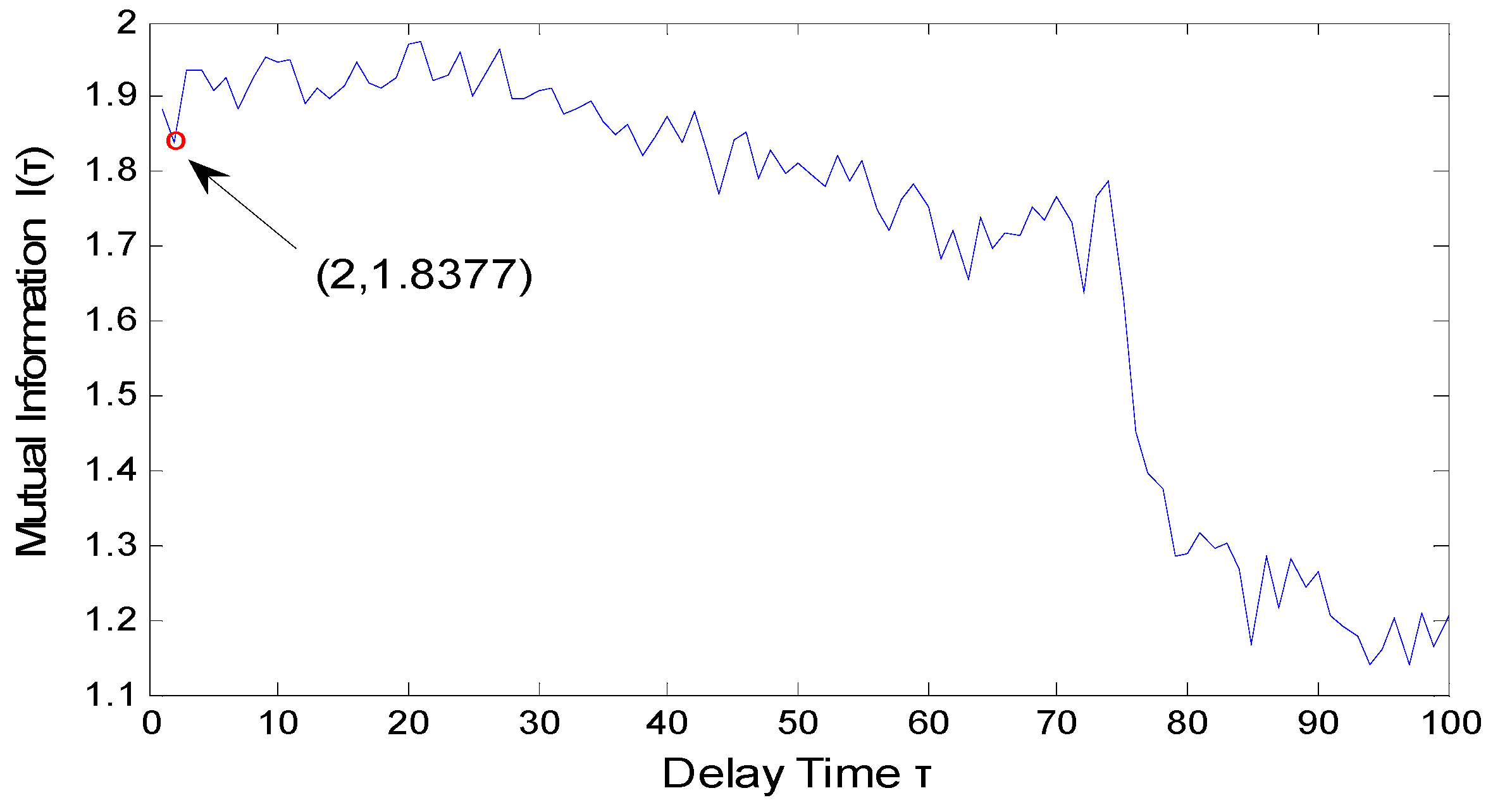
2.1.1. Phase Space Reconstruction (PSR)
2.1.2. Lyapunov Exponent
2.1.3. Kolmogorov Entropy
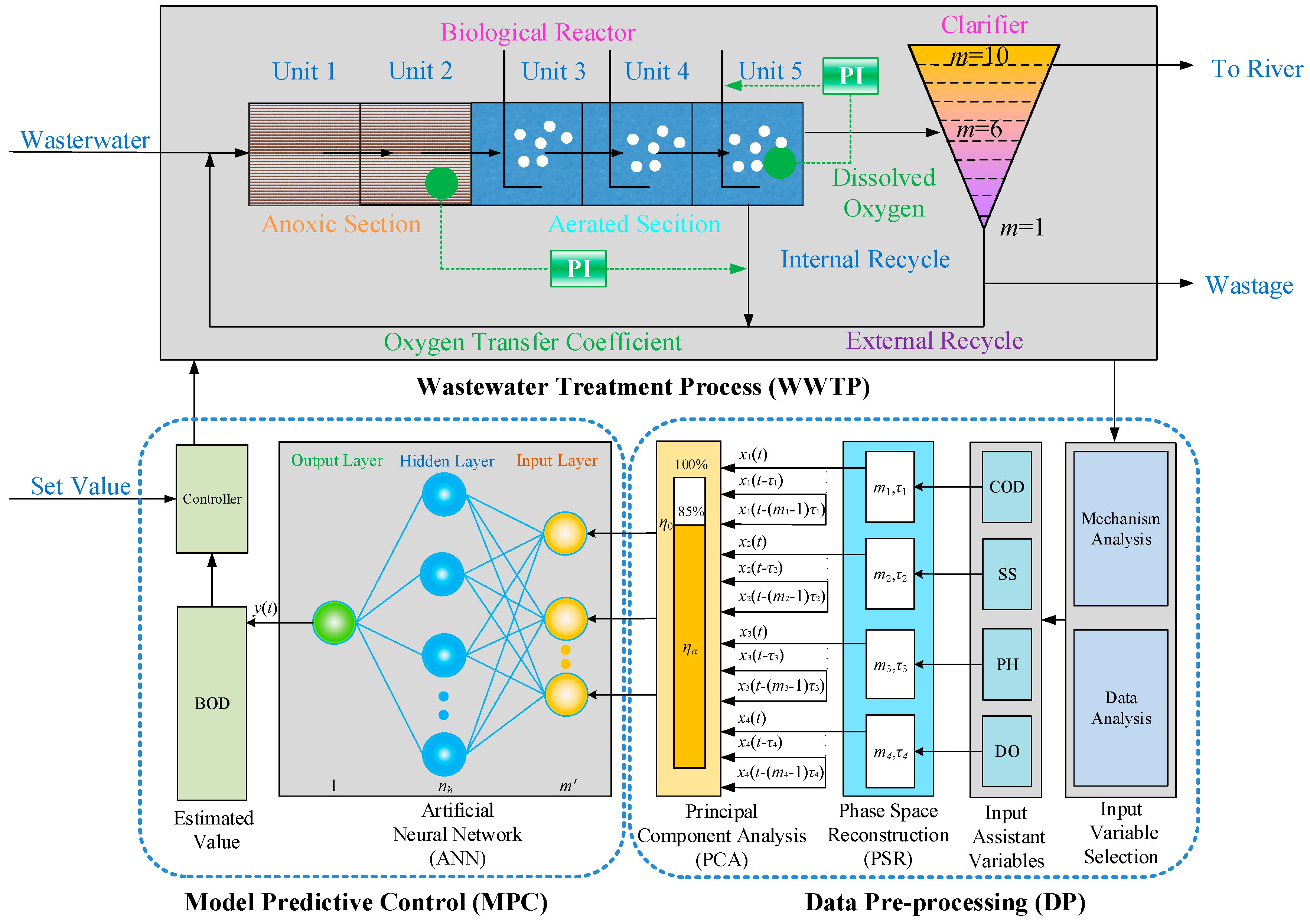
2.2. Soft Measurement Model
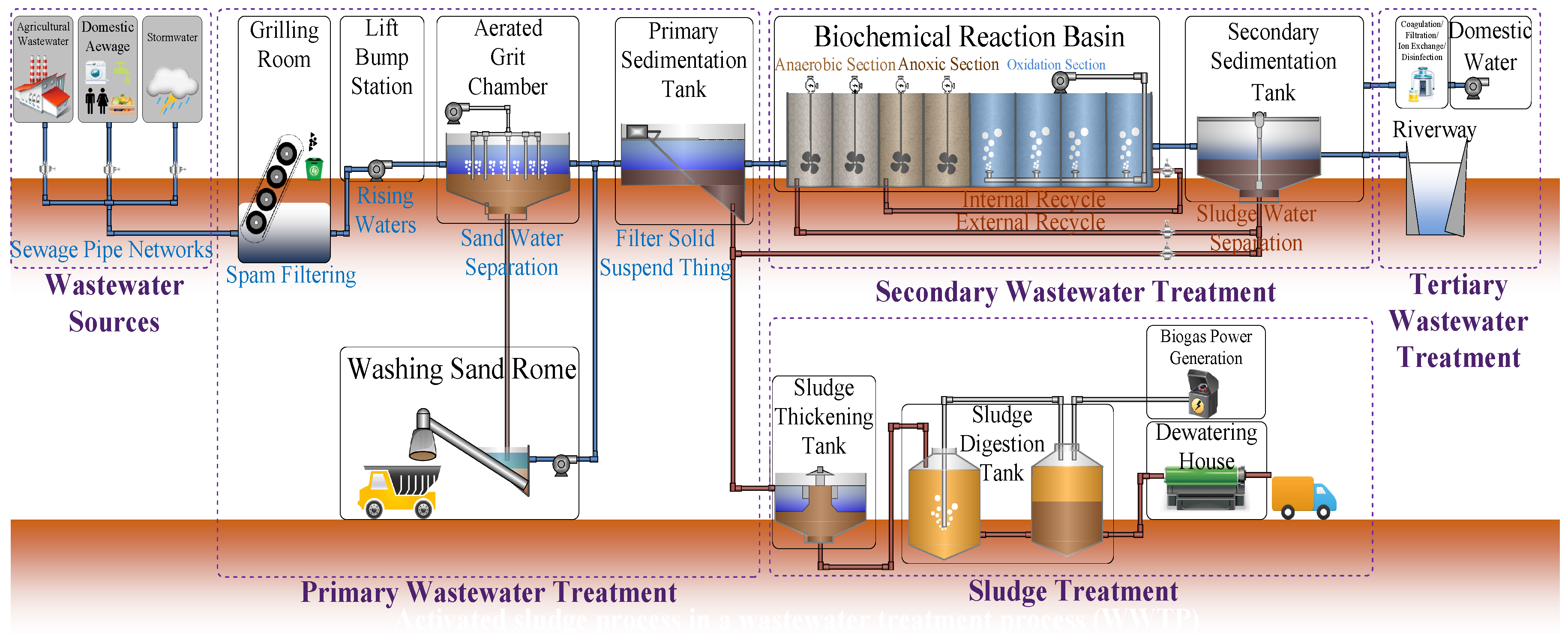
2.2.1. Wastewater Treatment Plant (WWTP)
- (a)
- Primary treatment. The preliminary step is used to remove large objects that have negatively influence on downstream processing equipment, the sand and other solid waste from the influent wastewater. Dense organic material is removed through primary sedimentation tank. The primary treated wastewater is transported to the biochemical reaction basin.
- (b)
- Secondary treatment. The biological treatment takes place in biochemical reaction basin in which the organic carbon (C), biological nitrogen (N), biological phosphorus (P) and ammonium are removed from the liquid portion of the wastewater by microorganism in the activated sludge and transferred to the solids portion. There is the secondary sedimentation tank, in which the treated water and the sludge are separated by physical subsiding.
- (c)
- Tertiary treatment. The advanced treatment further removes the refractory organic matter and soluble inorganic matter in order to make potable water when it is needed.
- (d)
- Sludge treatment. A fraction of the separated sludge in secondary sedimentation tank is returned to the biochemical reaction basin to sustain the ability of the wastewater treatment. The other redundant sludge is carried away after sludge treatment process.
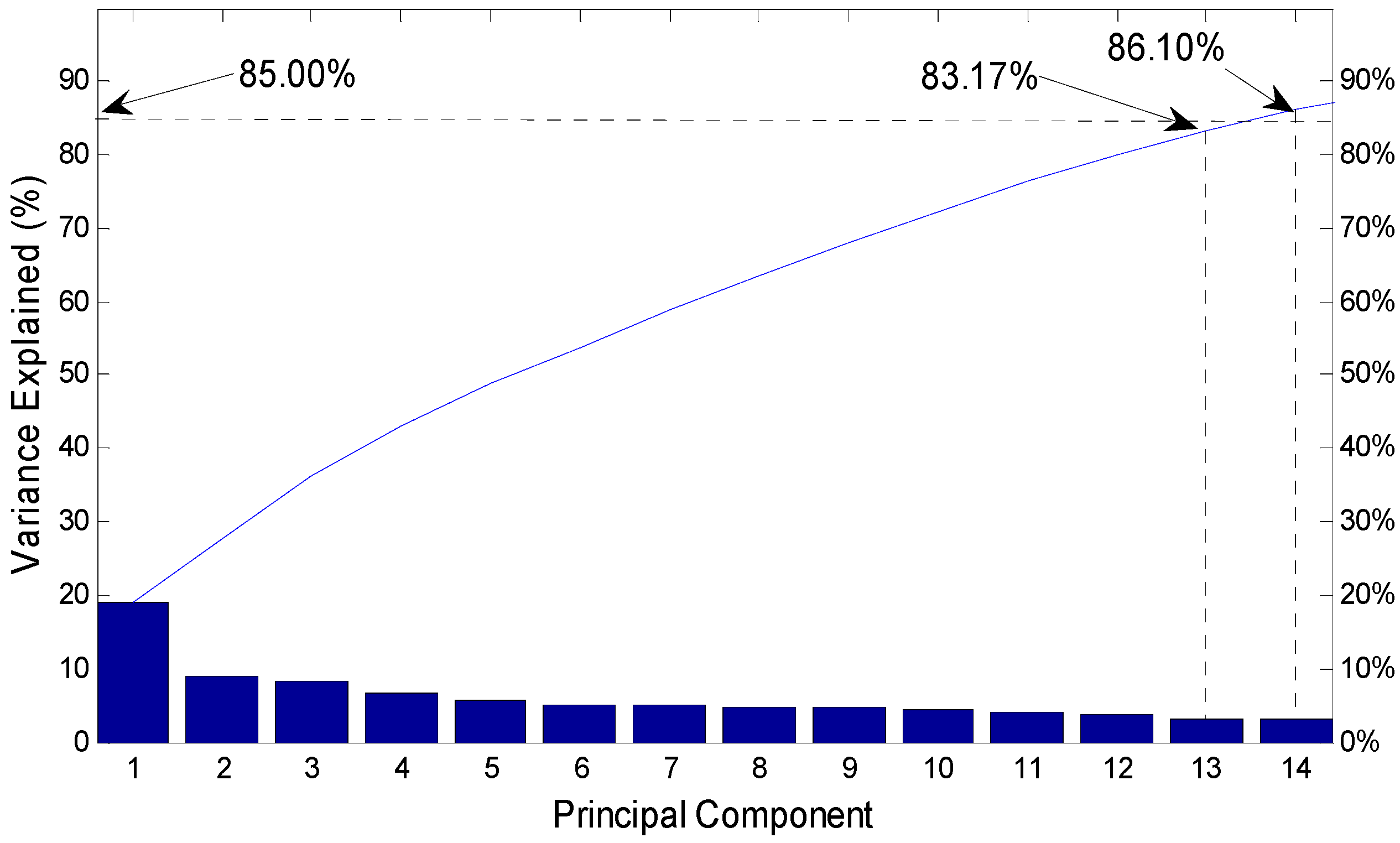
2.2.2. Principal Component Analysis (PCA)
2.2.3. Multivariate Chaotic Time Series Model for BOD
2.2.4. Evaluation of the Model
3. Results
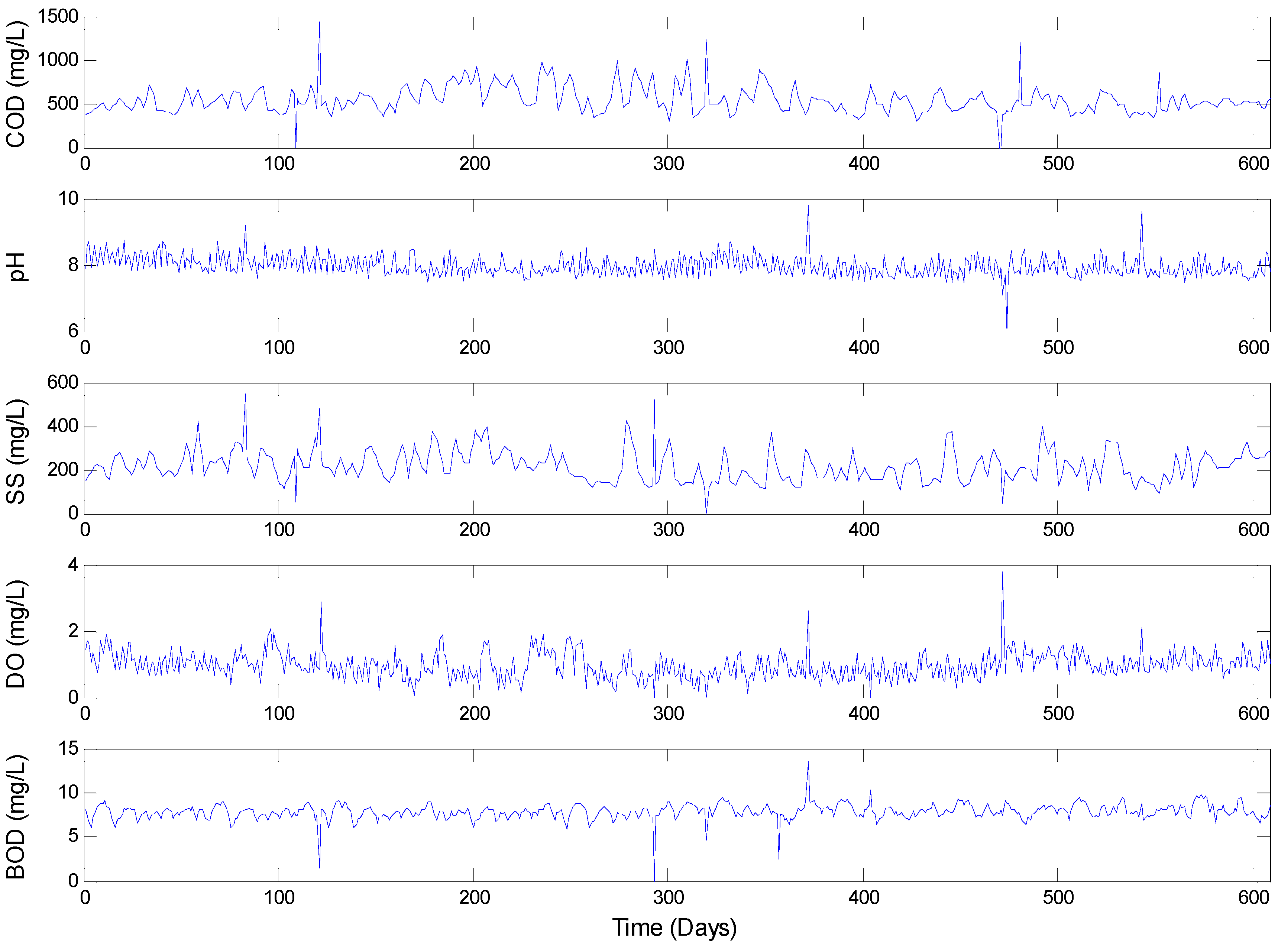
3.1. Data Source
3.2. The Chaotic Characteristic of WWTP
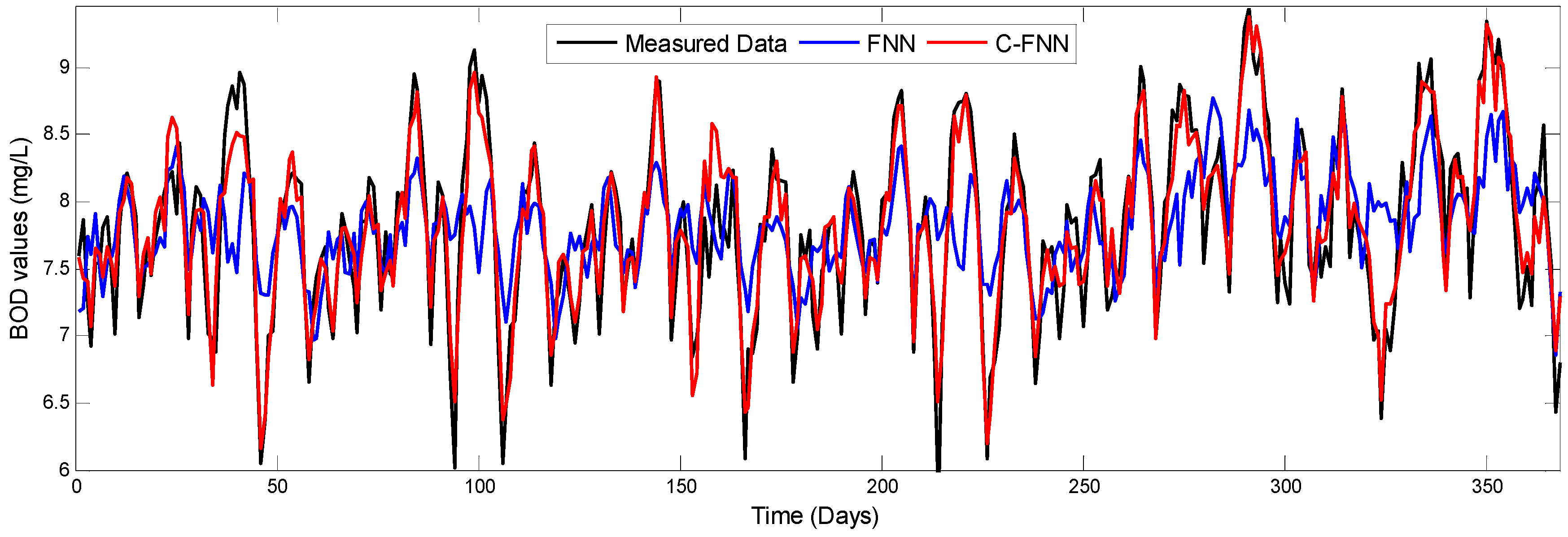
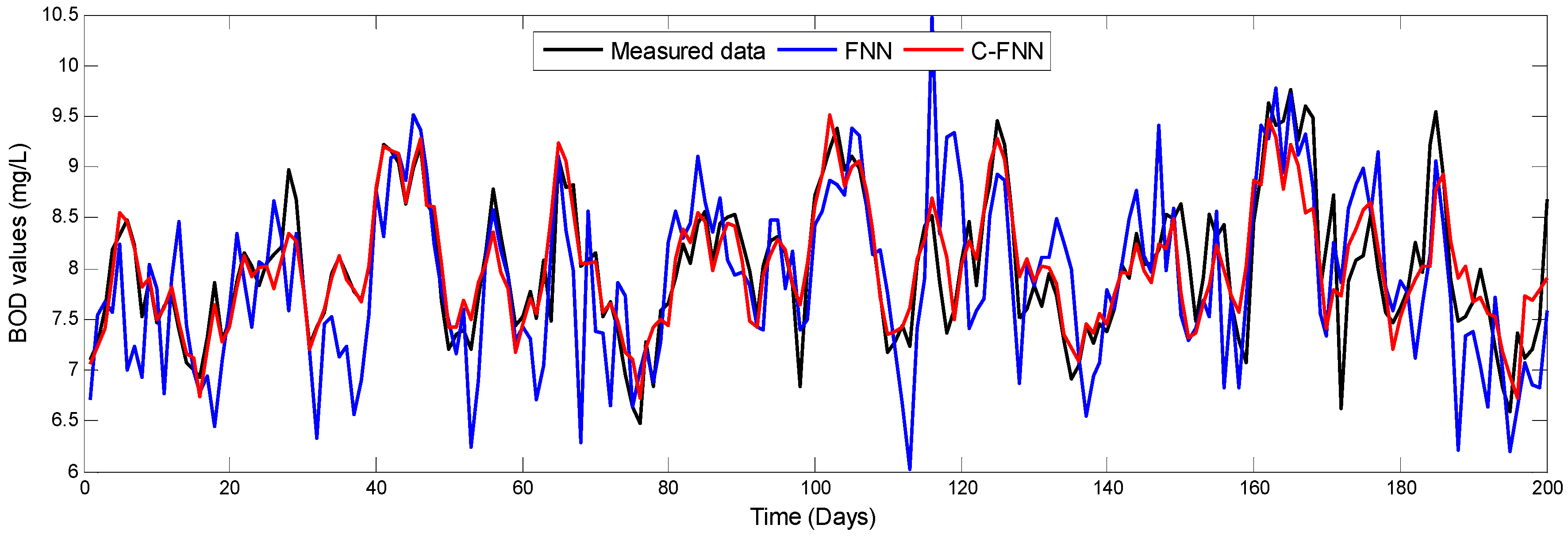
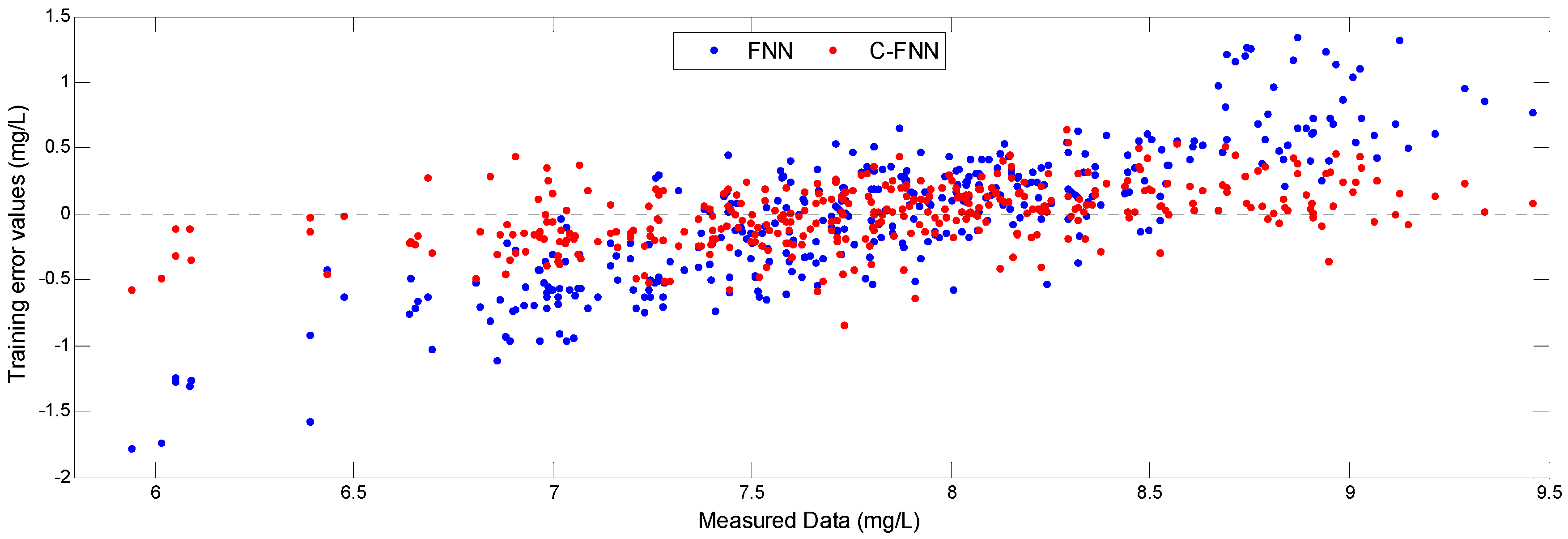
3.3. Soft Measurement for BOD Based on Chaos Theory
4. Discussion
- (a)
- The quantity of the original dataset. On the one hand, the more the amount of data, the more dynamic information can be contained and the better precision the chaotic characteristic analysis has. On the other hand, the ANN can learn more relationship and disciplinarian between input and output from it.
- (b)
- Effects of noise in the data. Generally, the original data also contain some noise, which have a negative effect on chaotic characteristic analysis and modeling in some degree. The noise can be defined as the unexplainable or random data that is found within the given data. In order to compare the difference between the de-noised data (Table 2) and noisy data for the chaotic characteristic analysis, the experiment are designed for noisy data. The results are listed in Table 4.
- (c)
- The selection of the input variables. Different input variables will lead to different results. With mechanism analysis, simulation study and existing papers [1,2,4,5], influent COD, SS, pH and DO are selected as the input assistant variables finally. For more comprehensive analysis, the other models with different input variables have been examined for comparison and selection. The testing RMSE of soft measurement modeling for BOD with different input variables are shown in Table 5.
- (d)
- The accuracy and rationality of the chaotic characteristic parameters. The chaotic characteristic parameters include delay time τ, embedding dimension m, Kolmogorov entropy K, and largest Lyapunov exponent λ1. The m, K and λ1 are used to judge whether the nonlinear system is chaotic or not and indicate the degree of chaotic motion. The K and λ1, which just are the characterization of chaos, can provide key information for judging chaotic system and have no impact on the modeling or prediction. Especially, τ and m, which directly decide the reconstructed phase space by PSR, need to be appropriately selected. The performance comparison with different τ and m for C-FNN model are listed in Table 6. The choice of this paper for τ and m are marked in bold. The number of the experimental phase points is the minimum value among them.
- (e)
- The selection of the ANN modeling parameters. The ANN modeling parameters include the number of input and hidden neurons, learning rate, maximum iterations, and maximum training error. The number of inputs is determined by the embedding dimension m and PCA. Several experiments are conducted for the number of hidden neurons based on the errors and the range in Equation (26). The larger or smaller learning rate can cause the oscillation or slower convergence speed for ANN, respectively.
- (f)
- Normalization and dimensionality reduction. Generally, the scope of the normalization is [0, 1] or [−1, 1]. The input and output dataset all need to be normalized for better training performance and generalization ability. The dimensions of input variables should be reduced for higher data quality. This needs to be further analyzed and tested for reasonable choice.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Qiao, J.; Li, W.; Han, H. Soft Computing of Biochemical Oxygen Demand Using an Improved T-S Fuzzy Neural Network. Chin. J. Chem. Eng. 2014, 22, 1254–1259. [Google Scholar] [CrossRef]
- Udeigwe, T.K.; Wang, J.J. Biochemical Oxygen Demand Relationships in Typical Agricultural Effluents. Water Air Soil Pollut. 2010, 213, 237–249. [Google Scholar] [CrossRef]
- Jouanneau, S.; Recoules, L.; Durand, M.J.; Boukabache, A.; Picot, V.; Primault, Y. Methods for assessing biochemical oxygen demand (BOD): A review. Water Res. 2013, 49, 62–82. [Google Scholar] [CrossRef] [PubMed]
- Han, H.; Chen, Q.; Qiao, J. Research on an online self-organizing radial basis function neural network. Neural Comput. Appl. 2010, 19, 667–676. [Google Scholar] [CrossRef] [PubMed]
- Jin, H.; Hwang, S.J.; Shin, J.K. Using synchronous fluorescence technique as a water quality monitoring tool for an urban river. Water Air Soil Pollut. 2008, 191, 231–243. [Google Scholar]
- Huang, M.; Ma, Y.; Wan, J.; Chen, X. A sensor-software based on a genetic algorithm-based neural fuzzy system for modeling and simulating a wastewater treatment process. Appl. Soft Comput. 2015, 27, 1–10. [Google Scholar] [CrossRef]
- Liu, W.C.; Chung, C.E. Enhancing the predicting accuracy of the water stage using a physical-based model and an artificial neural network-genetic algorithm in a river system. Water 2014, 6, 1642–1661. [Google Scholar] [CrossRef]
- Cheng, C.T.; Niu, W.J.; Feng, Z.K.; Shen, J.; Chau, K. Daily reservoir runoff forecasting method using artificial neural network based on quantum-behaved particle, swarm optimization. Water 2015, 7, 4232–4246. [Google Scholar] [CrossRef]
- Han, H.G.; Li, Y.; Guo, Y.N.; Qiao, J.F. A soft computing method to predict sludge volume index based on a recurrent self-organizing neural network. Appl. Soft Comput. 2016, 38, 477–486. [Google Scholar] [CrossRef]
- Lee, B.H.; Scholz, M. A comparative study: Prediction of constructed treatment wetland performance with k-nearest neighbors and neural networks. Water Air Soil Pollut. 2006, 174, 279–301. [Google Scholar] [CrossRef]
- Wang, W.C.; Li, K.; Chen, Z.X.; Niu, Q.Z. Soft Measurement technique of sewage treatment parameters based on wavelet neural networks. Appl. Mech. Mater. 2014, 556–562, 3168–3171. [Google Scholar] [CrossRef]
- Wan, J.; Huang, M.; Ma, Y.; Guo, W.; Wang, Y.; Zhang, H.; Sun, X. Prediction of effluent quality of a paper mill wastewater treatment using an adaptive network-based fuzzy inference system. Appl. Soft Comput. 2011, 11, 3238–3246. [Google Scholar] [CrossRef]
- Heddam, S.; Lamda, H.; Filali, S. Predicting effluent biochemical oxygen demand in a wastewater treatment plant using generalized regression neural network based approach: A comparative study. Environ. Process. 2016, 3, 153–165. [Google Scholar] [CrossRef]
- Vyas, M.; Modhera, B.; Vyas, V.; Sharma, A.K. Performance forecasting of common effluent treatment plant parameter by artificial neural network. J. Eng. Appl. Sci. 2011, 6, 38–42. [Google Scholar]
- Trapani, D.D.; Mannina, G.; Torregrossa, M.; Viviani, G. Quantification of kinetic parameters for heterotrophic bacteria via respirometry in a hybrid reactor. Water Sci. Technol. 2010, 61, 1757–1766. [Google Scholar] [CrossRef] [PubMed]
- Hussain, A.; Al-Rawajfeh, A.E.; Alsaraierh, H. Membrane bio reactors (MBR) in waste water treatment: A review of the recent patents. Recent Pat. Biotechnol. 2010, 4, 65–80. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Lei, S.; Sun, C.; Zhou, Q.; Ren, H. A multivariate forecasting method for short-term load using chaotic features and RBF neural network. Eur. Trans. Electr. Power 2011, 21, 1376–1391. [Google Scholar] [CrossRef]
- Fan, X.; Li, S.; Tian, L. Chaotic characteristic identification for carbon price and an multi-layer perceptron network prediction model. Expert Syst. Appl. 2015, 42, 3945–3952. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, T.; Liu, X. Melt index prediction by aggregated RBF neural networks trained with chaotic theory. Neurocomputing 2014, 131, 368–376. [Google Scholar] [CrossRef]
- Zhang, L.; Tian, F.; Liu, S.; Dang, L.; Peng, X.; Yin, X. Chaotic time series prediction of E-nose sensor drift in embedded phase space. Sens. Actuator B Chem. 2013, 182, 71–79. [Google Scholar] [CrossRef]
- Liang, Q.Z.; Guo, X.M.; Zhang, W.Y.; Dai, W.D.; Zhu, X.H. Identification of heart sounds with arrhythmia based on recurrence quantification analysis and Kolmogorov entropy. J. Med. Biol. Eng. 2015, 35, 209–217. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, J.; Wu, X.; Zhang, Y.; Li, J. A chaotic time series prediction model for speech signal encoding based on genetic programming. Appl. Soft Comput. 2015, 38, 754–761. [Google Scholar] [CrossRef]
- Takens, F. Detecting strange attractors in turbulence. In Dynamical Systems and Turbulence, Warwick 1981; Springer: Berlin/Heidelberg, Germany, 1981; pp. 366–381. [Google Scholar]
- Chandra, R.; Zhang, M. Cooperative coevolution of Elman recurrent neural networks for chaotic time series prediction. Neurocomputing 2012, 86, 116–123. [Google Scholar] [CrossRef]
- Li, Z.M.; Cui, L.G.; Xu, S.W.; Weng, L.Y.; Dong, X.X.; Li, G.Q.; Yu, H.P. Prediction model of weekly retail price for eggs based on chaotic neural network. J. Integr. Agric. 2013, 12, 2292–2299. [Google Scholar] [CrossRef]
- Hanias, M.P.; Karras, D.A. On efficient multistep non-linear time series prediction in chaotic diode resonator circuits by optimizing the combination of non-linear time series analysis and neural networks. Eng. Appl. Artif. Intell. 2009, 22, 32–39. [Google Scholar] [CrossRef]
- Han, M.; Wang, Y. Analysis and modeling of multivariate chaotic time series based on neural network. Expert Syst. Appl. 2009, 36, 1280–1290. [Google Scholar]
- Su, L.Y. Prediction of multivariate chaotic time series with local polynomial fitting. Comput. Math. Appl. 2010, 59, 737–744. [Google Scholar] [CrossRef]
- Chen, D.; Han, W. Prediction of multivariate chaotic time series via radial basis function neural network. Complexity 2013, 18, 55–66. [Google Scholar] [CrossRef]
- Kim, H.; Eykholt, R.; Salas, J.D. Nonlinear dynamics, delay times, and embedding windows. Phys. D Nonlinear Phenom. 1999, 127, 48–60. [Google Scholar] [CrossRef]
- Hacine-Gharbi, A.; Ravier, P.; Harba, R.; Mohamadi, T. Low bias histogram-based estimation of mutual information for feature selection. Pattern Recognit. Lett. 2012, 33, 1302–1308. [Google Scholar] [CrossRef]
- Grassberger, P.; Procaccia, I. Measuring the strangeness of strange attractors. Phys. D Nonlinear Phenom. 1983, 9, 189–208. [Google Scholar] [CrossRef]
- Grassberger, P.; Procaccia, I. Characterization of strange attractors. Phys. Rev. Lett. 1983, 50, 346–349. [Google Scholar] [CrossRef]
- Cao, L. Practical method for determining the minimum embedding dimension of a scalar time series. Phys. D Nonlinear Phenom. 1997, 110, 43–50. [Google Scholar] [CrossRef]
- Chai, S.H.; Lim, J. Forecasting business cycle with chaotic time series based on neural network with weighted fuzzy membership functions. Chaos Soliton Fractal 2016, 90, 118–126. [Google Scholar] [CrossRef]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponents from a time series. Phys. D Nonlinear Phenom. 1985, 16, 285–317. [Google Scholar] [CrossRef]
- Grassberger, P.; Procaccia, I. Estimation of the Kolmogorov entropy from a chaotic signal. Phys. Rev. A 1983, 28, 2591–2593. [Google Scholar] [CrossRef]
- Han, H.G.; Qiao, J.F. Prediction of activated sludge bulking based on a self-organizing RBF neural network. J. Process Control 2012, 22, 1103–1112. [Google Scholar] [CrossRef]
- Han, H.G.; Qian, H.H.; Qiao, J.F. Nonlinear multi-objective model-predictive control scheme for waste water treatment process. J. Process Control 2014, 24, 47–59. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Var. | Unit | Connotation | Var. | Unit | Connotation |
|---|---|---|---|---|---|
| Q | m3/d | Influent flow | BOD | mg/L | Biochemical oxygen demand |
| T | °C | Temperature | COD | mg/L | Chemical oxygen demand |
| pH | 1 | Acidity and basicity | SS | mg/L | Suspended solids |
| ORP | mV | Oxidation-reduction potential | TSS | mg/L | Total suspended solids |
| DO | mg/L | Dissolved oxygen | TP | mg/L | Total phosphorus |
| MLSS | mg/L | Mixed liquor suspended solids | TN | mg/L | Total nutrients |
| NH4-N | mg/L | Ammonia nitrogen | SVI | mg/L | Sludge volume index |
| NOx-N | mg/L | Nitrate nitrogen | EC | μS/cm | Electrical conductivity |
| τ | D | m | K | λ1 | |
|---|---|---|---|---|---|
| BOD | 2 | 1.2114 | 8 | 0.067637 | 0.31441 |
| COD | 3 | 1.5542 | 6 | 0.025344 | 0.16525 |
| pH | 5 | 2.1654 | 6 | 0.050063 | 0.21736 |
| SS | 3 | 1.3760 | 5 | 0.043527 | 0.59079 |
| DO | 5 | 2.7908 | 7 | 0.079561 | 0.70781 |
| Model | m | τ | nh | Training RMSE (mg/L) | Testing RMSE (mg/L) | MAPE (%) | Run Time (s) | |
|---|---|---|---|---|---|---|---|---|
| Min | Max | |||||||
| MLP [14] | [1 1 1 1 1] | —— | 12 | 0.4372 | 1.0799 | 9.29% | 12.45% | 70.85 |
| C-MLP | [8 6 6 5 7] | [2 3 5 3 5] | 12 | 0.5104 | 0.7181 | 5.85% | 8.45% | 74.82 |
| RBF [7] | [1 1 1 1 1] | —— | 12 | 0.5981 | 0.8504 | 8.33% | 9.15% | 64.38 |
| C-RBF | [8 6 6 5 7] | [2 3 5 3 5] | 12 | 0.3013 | 0.5830 | 5.12% | 6.70% | 83.98 |
| Elman | [1 1 1 1 1] | —— | 10 | 0.4885 | 0.7810 | 7.40% | 8.79% | 184.76 |
| C-Elman | [8 6 6 5 7] | [2 3 5 3 5] | 10 | 0.1947 | 0.5493 | 4.42% | 6.38% | 202.23 |
| FNN [1] | [1 1 1 1 1] | —— | 10 | 0.3665 | 0.6528 | 5.94% | 7.68% | 716.68 |
| C-FNN | [8 6 6 5 7] | [2 3 5 3 5] | 10 | 0.1356 | 0.3430 | 2.90% | 5.40% | 824.24 |
| τ | D | m | K | λ1 | |
|---|---|---|---|---|---|
| BOD | 9↑ | — | — | 0.117459↑ | — |
| COD | 8↑ | — | — | 0.050545↑ | 0.31656↑ |
| pH | 6↑ | 2.0546↓ | 5↓ | 0.052154↑ | 0.28380↑ |
| SS | 2↓ | 4.1697↑ | 9↑ | — | 0.85217↑ |
| DO | 3↓ | — | — | 0.126237↑ | 1.47943↑ |
| Inputs | MLP [14] | C-MLP | RBF [7] | C-RBF | Elman | C-Elman | FNN [1] | C-FNN |
|---|---|---|---|---|---|---|---|---|
| (1) | 1.3284 | 0.8791 | 0.9423 | 0.6842 | 0.8641 | 0.7281 | 0.8415 | 0.6756 |
| (2) | 1.1746 | 0.6926 | 0.8615 | 0.6028 | 0.7755 | 0.5807 | 0.6514 | 0.3718 |
| (3) | 1.0799 | 0.7181 | 0.8504 | 0.5830 | 0.7810 | 0.5493 | 0.6528 | 0.3430 |
| (4) | 1.5440 | 1.2125 | 1.3352 | 0.9647 | 1.1434 | 0.8542 | 0.9542 | 0.7654 |
| (5) | 2.0158 | 1.6452 | 1.5434 | 1.1715 | 1.3682 | 0.9156 | 1.3105 | 1.0426 |
| (6) | 3.5415 | 3.0571 | 3.1642 | 2.4546 | 2.5674 | 2.3482 | 2.6461 | 2.4875 |
| m | τ | nh | M | Mtrain | Mtest | Training RMSE (mg/L) | Testing RMSE (mg/L) | MAPE (%) | |
|---|---|---|---|---|---|---|---|---|---|
| Min | Max | ||||||||
| [9 9 9 9 9] | [2 3 5 3 5] | 10 | 558 | 342 | 200 | 0.2935 | 0.4976 | 4.18% | 7.41% |
| [8 8 8 8 8] | [2 3 5 3 5] | 10 | 563 | 342 | 200 | 0.1961 | 0.4224 | 3.56% | 6.85% |
| [5 5 5 5 5] | [2 3 5 3 5] | 10 | 578 | 342 | 200 | 0.1780 | 0.3973 | 3.29% | 6.03% |
| [1 1 1 1 1] | [2 3 5 3 5] | 10 | 598 | 342 | 200 | 1.1683 | 1.5390 | 13.44% | 15.42% |
| [8 6 6 5 7] | [2 3 5 3 5] | 10 | 568 | 342 | 200 | 0.1404 | 0.3622 | 2.98% | 5.68% |
| [8 6 6 5 7] | [1 1 1 1 1] | 10 | 591 | 342 | 200 | 0.4862 | 0.7493 | 6.23% | 9.97% |
| [8 6 6 5 7] | [2 2 2 2 2] | 10 | 584 | 342 | 200 | 0.2698 | 0.4735 | 4.07% | 7.64% |
| [8 6 6 5 7] | [5 5 5 5 5] | 10 | 563 | 342 | 200 | 0.2120 | 0.4476 | 3.75% | 5.28% |
| [8 6 6 5 7] | [8 8 8 8 8] | 10 | 542 * | 342 | 200 | 0.7503 | 1.1023 | 9.56% | 12.31% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, J.; Hu, Z.; Li, W. Soft Measurement Modeling Based on Chaos Theory for Biochemical Oxygen Demand (BOD). Water 2016, 8, 581. https://doi.org/10.3390/w8120581
Qiao J, Hu Z, Li W. Soft Measurement Modeling Based on Chaos Theory for Biochemical Oxygen Demand (BOD). Water. 2016; 8(12):581. https://doi.org/10.3390/w8120581
Chicago/Turabian StyleQiao, Junfei, Zhiqiang Hu, and Wenjing Li. 2016. "Soft Measurement Modeling Based on Chaos Theory for Biochemical Oxygen Demand (BOD)" Water 8, no. 12: 581. https://doi.org/10.3390/w8120581
APA StyleQiao, J., Hu, Z., & Li, W. (2016). Soft Measurement Modeling Based on Chaos Theory for Biochemical Oxygen Demand (BOD). Water, 8(12), 581. https://doi.org/10.3390/w8120581