Sediment Size Effects in Acoustic Doppler Velocimeter-Derived Estimates of Suspended Sediment Concentration

Abstract
:1. Introduction
2. Materials and Methods
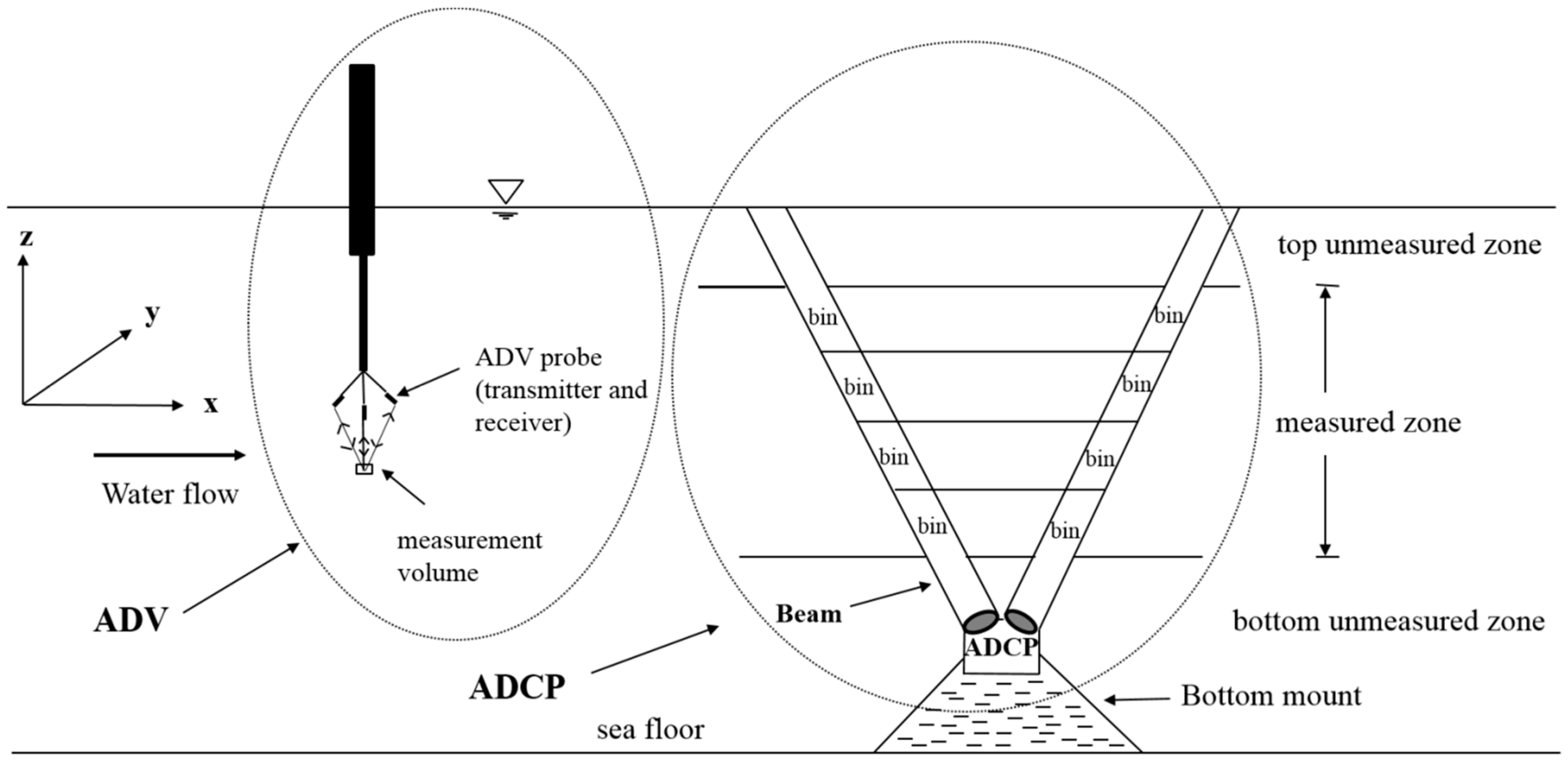
2.1. Instrumentation and Theoretical Background
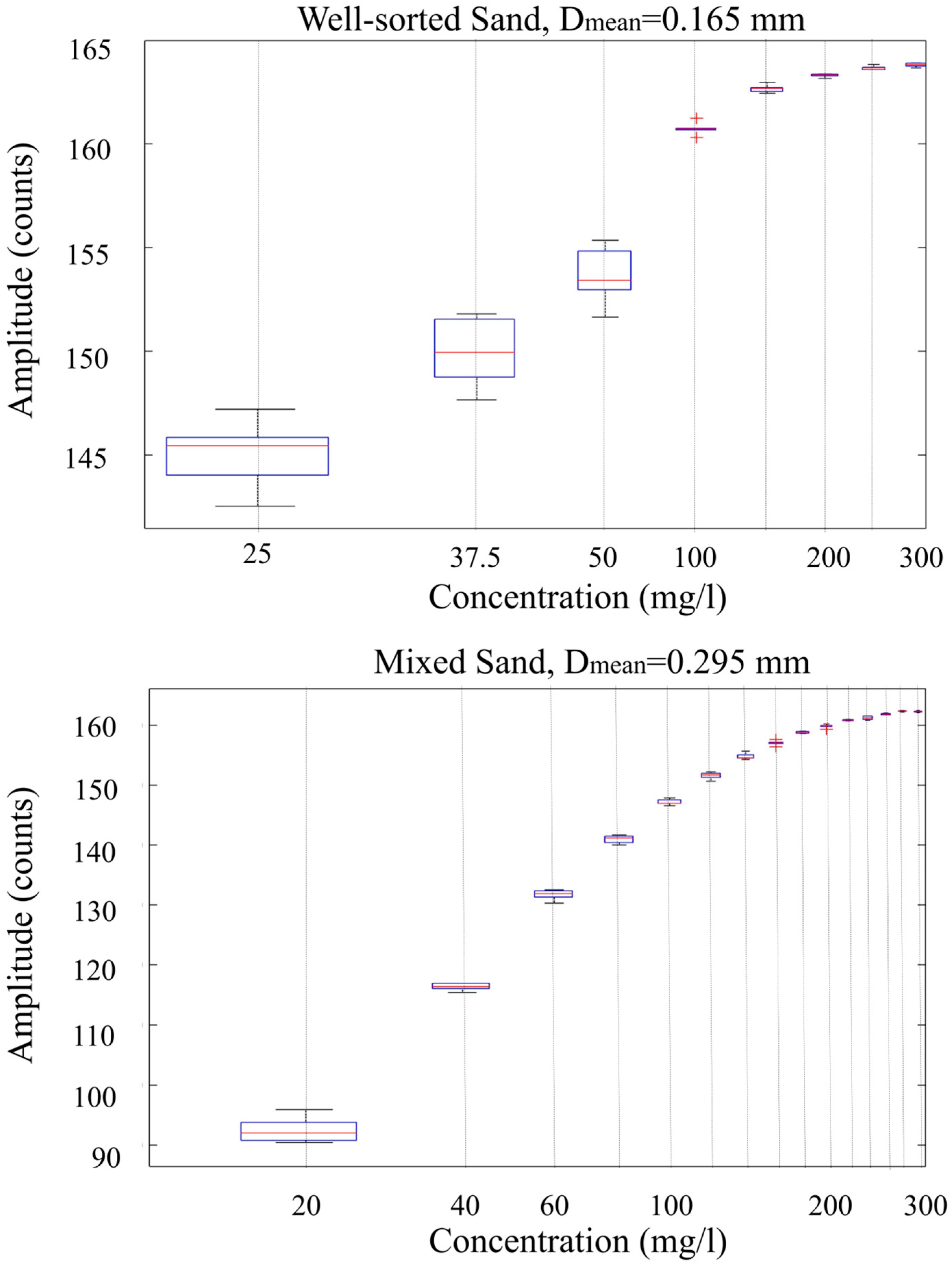
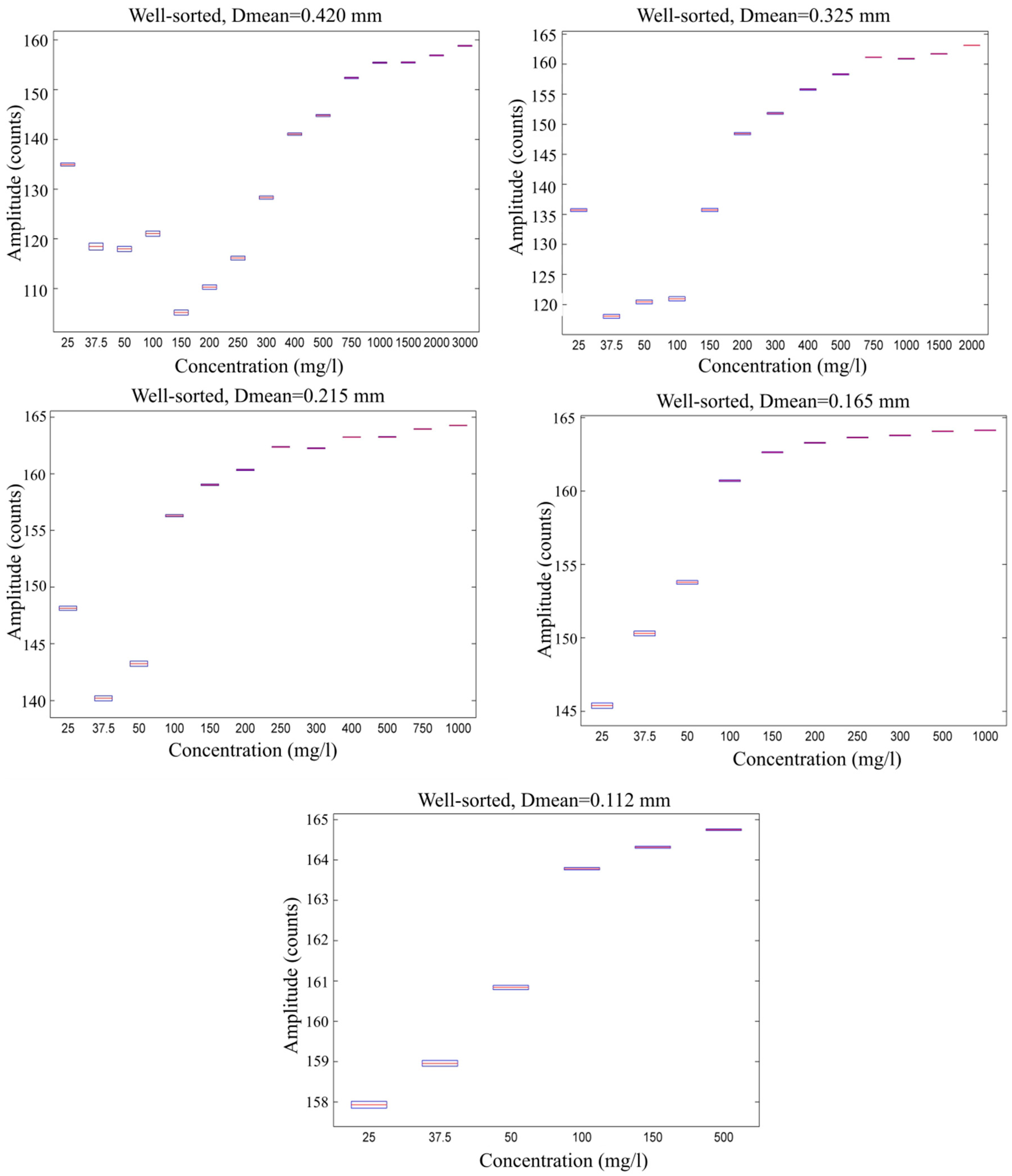
2.2. Backscatter vs. Concentration
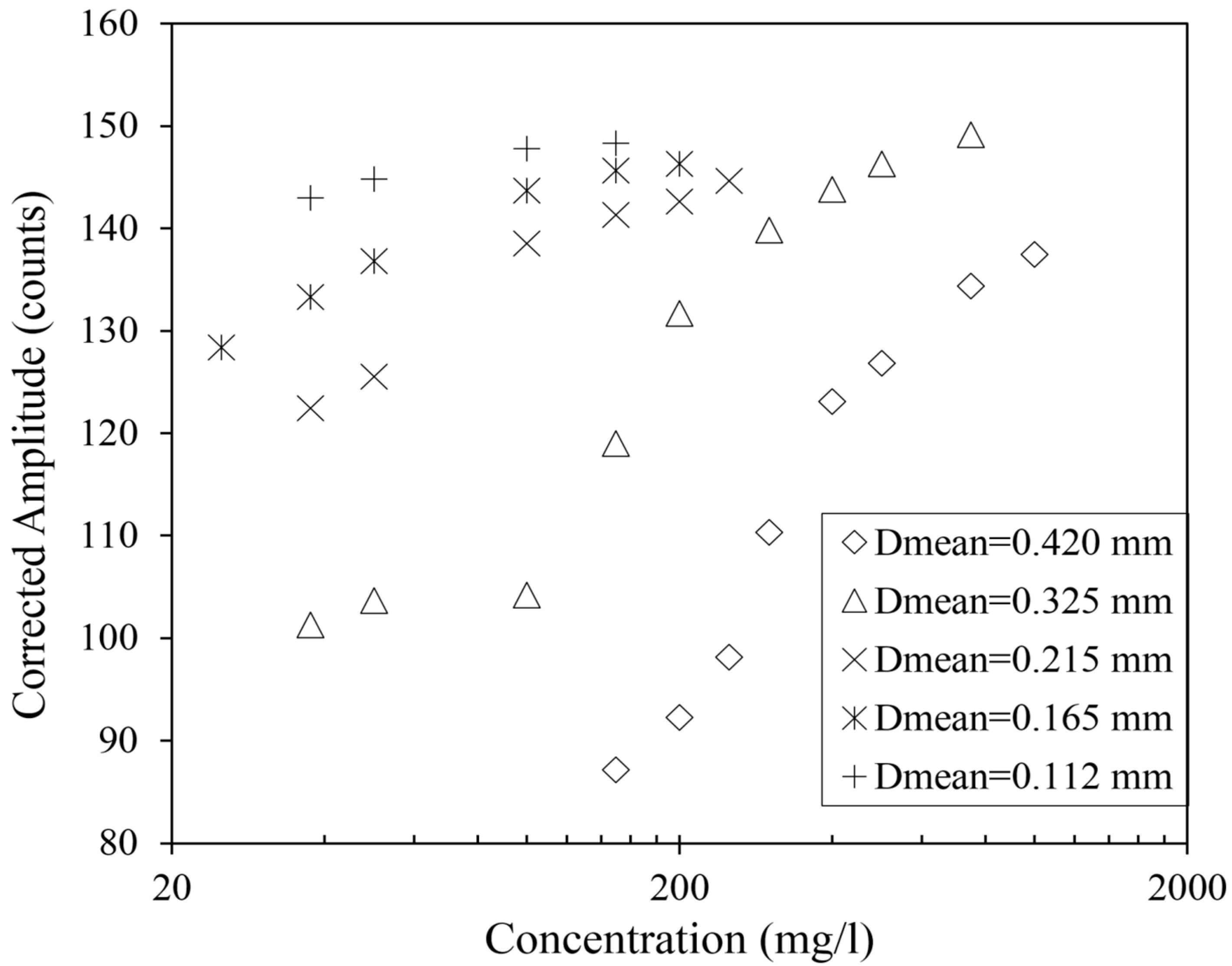
3. Results
4. Discussion and Conclusions
Acknowledgments
Conflicts of Interest
References
- Pimentel, D.; Harvey, C.; Resosudarmao, P.; Sinclair, K.; Kurz, D.; McNair, M.; Crist, S.; Shpritz, L.; Fitton, L.; Saffouri, R.; et al. Environmental and economic costs of soil erosion and conservation benefits. Science 1995, 267, 1117–1123. [Google Scholar] [CrossRef] [PubMed]
- Crosson, P. Will erosion threaten agricultural productivity? Environment 1997, 39, 4–31. [Google Scholar] [CrossRef]
- Wood, P.J.; Armitage, P.D. Biological effects of fine sediment in the lotic environment. Environ. Manag. 1997, 21, 203–217. [Google Scholar] [CrossRef]
- Landers, M.N.; Mueller, D.S. Evaluation of selected pier-scour equations using field data. Transp. Res. Rec. 1996, 1523, 186–195. [Google Scholar] [CrossRef]
- Sturm, T.W. Scour around bankline and setback abutments in compound channels. J. Hydraul. Eng. ASCE 2006, 132, 21–32. [Google Scholar] [CrossRef]
- Gartner, J.W. Estimation of suspended solids concentrations based on acoustic backscatter intensity: Theoretical background. In Turbidity and Other Sediment Surrogates; Workshop Proceedings: Reno, NV, USA, 2002. [Google Scholar]
- Battisto, G.M. Field measurement of mixed grain size suspension in the nearshore under waves. Master’s Thesis, School of Marine Science, College of William and Mary, Williamsburg, VA, USA, 2000. [Google Scholar]
- Thorne, P.D.; Buckingham, M.J. Measurements of scattering by suspensions of irregularly shaped sand particles and comparison with a single parameter modified sphere model. J. Acoust. Soc Am. 2004, 116, 2876–2889. [Google Scholar] [CrossRef]
- Betteridge, K.F.E.; Thorne, P.D.; Cooke, R.D. Calibrating multi-frequency acoustic backscatter systems for studying near-bed suspended sediment transport processes. Cont. Shelf Res. 2008, 28, 227–235. [Google Scholar] [CrossRef]
- Crawford, A.M.; Hay, A.E. Determining suspended sand size and concentration from multi-frequency acoustic backscatter. J. Acoust. Soc. Am. 1993, 94, 3312–3324. [Google Scholar] [CrossRef]
- Gartner, J.W. Estimating suspended solids concentrations from backscatter intensity measured by acoustic Doppler current profiler in San Francisco Bay, California. Mar. Geol. 2004, 211, 169–187. [Google Scholar] [CrossRef]
- Thorne, P.D.; Vincent, C.E.; Hardcastle, P.J.; Rehman, S.; Pearson, N. Measuring suspended sediment concentrations using acoustic backscatter devices. Mar. Geol. 1991, 98, 7–16. [Google Scholar] [CrossRef]
- Wall, G.R.; Nystrom, E.A.; Litten, S. Use of an ADCP to Compute Suspended-Sediment Discharge in the Tidal Hudson River; U.S. Geological Survey: New York, NY, USA, 2006.
- Schoellhamer, D.H.; Wright, S.A. Continuous measurement of suspended-sediment discharge in rivers by use of optical backscatterance sensors. In Erosion and Sediment Transport Measurement in Rivers, Technological and Methodological Advances; Bogen, J., Fergus, T., Walling, D.E., Eds.; International Association of Hydrological Sciences Publication: Wallingford, UK, 2003; pp. 28–36. [Google Scholar]
- Pruitt, B.A. Uses of turbidity by States and Tribes. In Proceedings of the Federal Interagency Workshop on Turbidity and Other Sediment Surrogates, Reno, NV, USA, 30 April–2 May 2002; pp. 31–46. [Google Scholar]
- Buchanan, P.A.; Morgan, T.L. Summary of Suspended-Sediment Concentration Data, San Francisco Bay, California, Water Year 2010; U.S. Geological Survey Data Series: Reston, VA, USA, 2014.
- Thorne, P.D.; Hanes, D.M. A review of acoustic measurement of small-scale sediment processes. Cont. Shelf Res. 2002, 22, 603–632. [Google Scholar] [CrossRef]
- Downing, J.P.; Sternberg, R.W.; Lister, C.R.B. New instrumentation for the investigation of sediment suspension processes in the shallow marine environment. Mar. Geol. 1981, 42, 19–34. [Google Scholar] [CrossRef]
- Downing, J.P. An optical instrument for monitoring suspended particles in ocean and laboratory. In In Proceedings of the OCEANS ’83, San Francisco, CA, USA, 29 August–1 September 1983; pp. 199–202. [Google Scholar]
- Uhrich, M.A. Determination of total and clay suspended-sediment loads from instream turbidity data in the North Santiam River Basin, Oregon, 1998–2002. In Proceedings of the Federal Interagency Workshop on Turbidity and Other Sediment Surrogates, Reno, NV, USA, 30 April–2 May 2002. [Google Scholar]
- Rasmussen, P.P.; Bennett, T.; Lee, C.; Christensen, V.G. Continuous in-situ measurement of turbidity in Kansas streams. In In Proceedings of the Turbidity and Other Sediment Surrogates Workshop, Reno, NV, USA, 30 April–2 May 2002. [Google Scholar]
- Melis, T.S.; Topping, D.J.; Rubin, D.M. Testing laser-based sensors for continuous in situ monitoring of suspended sediment in the Colorado River, Arizona. In Erosion and Sediment Transport Measurement in Rivers, Technological and Methodological Advances; Bogen, J., Fergus, T., Walling, D.E., Eds.; International Association of Hydrological Sciences Publication: Wallingford, UK, 2003; pp. 21–27. [Google Scholar]
- Ludwig, K.A.; Hanes, D.M. A laboratory evaluation of optical backscatterance suspended solids sensors exposed to sand-mud mixtures. Mar. Geol. 1990, 94, 173–179. [Google Scholar] [CrossRef]
- Agrawal, Y.C.; Pottsmith, H.C. Laser diffraction particle sizing in STRESS. Cont. Shelf Res. 1994, 14, 1101–1121. [Google Scholar] [CrossRef]
- Gartner, J.W.; Cheng, R.T.; Wang, P.F.; Richter, K. Laboratory and field evaluations of LISST-100 instrument for suspended particle size determinations. Mar. Geol. 2001, 175, 199–219. [Google Scholar] [CrossRef]
- Andrews, S.W.; Nover, D.M.; Reuter, J.E.; Schladow, S.G. Limitations of laser diffraction for measuring fine particles in oligotrophic systems: Pitfalls and potential solutions. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef]
- Hay, A.E. Sound scattering from a particle-laden turbulent jet. J. Acoust. Soc. Am. 1991, 90, 2055–2074. [Google Scholar] [CrossRef]
- Hay, A.E.; Sheng, J. Vertical profiles of suspended sand concentration and size from multifrequency acoustic backscatter. J. Geophys. Res. 1992, 97, 15661–15677. [Google Scholar] [CrossRef]
- Thorne, P.D.; Hardcastle, P.J. Acoustic measurements of suspended sediments in turbulent currents and comparison with in-situ samples. J. Acoust. Soc. Am. 1997, 101, 2603–2614. [Google Scholar] [CrossRef]
- Landers, M.N. Fluvial Suspended Sediment Characteristics by High-Resolution, Surrogate Metrics of Turbidity, Laser-Diffraction, Acoustic Backscatter, and Acoustic Attenuation. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2012. [Google Scholar]
- Landers, M.N.; Straub, T.D.; Wood, M.S.; Domanski, M.M. Sediment Acoustic Index Method for Computing Continuous Suspended-Sediment Concentrations; U.S. Geological Survey Techniques and Methods: Reston, VA, USA, 2016; p. 63.
- Sheng, J.; Hay, A.E. An examination of the spherical scatterer approximation in aqueous suspensions of sand. J. Acoust. Soc. Am. 1988, 83, 598–610. [Google Scholar] [CrossRef]
- Thorne, P.D.; Campbell, S.C. Backscattering by a suspension of spheres. J. Acoust. Soc. Am. 1992, 92, 978–986. [Google Scholar] [CrossRef]
- Wright, S.A.; Topping, D.J.; Williams, C.A. Discriminating silt-and-clay from suspended sand in rivers using side-looking acoustic profilers. In Proceedings of the 2nd Joint Federal Interagency Conference, Las Vegas, NV, USA, 27 June–1 July 2010. [Google Scholar]
- Moura, M.G.; Quaresma, V.S.; Bastos, A.C.; Veronez, P.J. Field observations of SPM using ADV, ADP, and OBS in shallow estuarine system with low SPM concentration-Vitoria Bay, SE Brazil. Ocean Dynam. 2011, 61, 273–283. [Google Scholar] [CrossRef]
- Sassi, M.G.; Hoitink, A.J.F.; Vermeulen, B. Impact of sound attenuation by suspended sediment on ADCP backscatter calibrations. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Alvarez, L.G.; Jones, S.E. Factors influencing suspended sediment flux in the upper Gulf of California. Estuar. Coast. Shelf 2002, 54, 747–759. [Google Scholar] [CrossRef]
- Kim, Y.H.; Voulgaris, G. Estimation of suspended sediment concentration in estuarine environments using acoustic backscatter from an ADCP. In Proceedings of the International Conference on Coastal Sediments, Clearwater Beach, FL, USA, 18–23 May 2003. [Google Scholar]
- Chanson, H.; Takeuchi, M.; Trevethan, M. Using turbidity and acoustic backscatter intensity as surrogate measures of suspended sediment concentration in a small subtropical estuary. J. Environ. Manag. 2008, 88, 1406–1416. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elci, Ş.; Aydın, R.; Work, P.A. Estimation of suspended sediment concentration in rivers using acoustic methods. Environ. Monit. Assess. 2009, 159, 255–265. [Google Scholar] [CrossRef] [PubMed]
- Hosseini, S.A.; Shamsai, A.; Ataie-Astiani, B. Synchronous measurements of the velocity and concentration in low density turbidity currents using an acoustic Doppler velocimeter. Flow Meas. Instrum. 2005, 17, 59–68. [Google Scholar] [CrossRef]
- Kostaschuk, R.A.; Best, J.; Villard, P.V.; Peakall, J.; Franklin, M. Measuring flow velocity and sediment transport with an acoustic Doppler current profiler. Geomorphology 2004, 68, 25–37. [Google Scholar] [CrossRef]
- Parsons, J.D. Mixing Mechanisms in Density Intrusions. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 1998. [Google Scholar]
- Sternberg, R.W.; Kineke, G.C.; Johnson, R. An instrument system for profiling suspended sediment, fluid, and flow conditions in shallow marine environments. Cont. Shelf Res. 1991, 11, 109–122. [Google Scholar] [CrossRef]
- Soulsby, R.L. Selecting record length and digitization rate for near bed turbulence measurements. J. Phys. Oceanogr. 1980, 10, 208–219. [Google Scholar] [CrossRef]
- Best, J.; Kirkbride, A.D.; Peakall, J. Mean flow and turbulence structure of gravity currents: New insights using ultrasonic Doppler velocity profiling. Part. Gravity Curr. 2001, 159–172. [Google Scholar] [CrossRef]
- Nortek, As. Vector Current Meter User Manual. Rud, Norway 2005. Available online: http://www.nortek-as.com (accessed on 13 July 2017).
- Thevenot, M.M.; Prickett, T.L.; Kraus, N.C. Tylers Beach, Virginia, Dredged Material Plume Monitoring Project, 27 September to 4 October 1991; Dredging Research Program Technical Report DRP-92–7; US Army Corps of Engineers; U.S. Army Engineer Waterways Experiment Station: Washington, DC, USA, 1992.
- Baranya, S.; Jozsa, J. Estimation of suspended sediment concentrations with ADCP in Danube River. J. Hydrol. Hydromech. 2013, 61, 232–240. [Google Scholar] [CrossRef]
- Shulkin, M.; Marsh, H.W. Sound absorption in sea water. J. Acoust. Soc. Am. 1962, 34, 864–865. [Google Scholar] [CrossRef]
- Fisher, F.H.; Simmons, V.P. Sound absorption in seawater. J. Acoust. Soc. Am. 1977, 62, 558–564. [Google Scholar] [CrossRef]
- Urick, R.J. The absorption of sound in suspensions of irregular particles. J. Acoust. Soc. Am. 1948, 20, 283–289. [Google Scholar] [CrossRef]
- SonTek Technical Notes. Doppler Current Meters- Using Signal Strength to Monitor Suspended Sediment Concentration; SonTek Inc.: San Diego, CA, USA, 1988.
- Rouhnia, M.; Keyvani, A.; Strom, K. Do changes in the size of mud flocs affect the acoustic backscatter values recorded by a Vector ADV? Cont. Shelf Res. 2014, 84, 84–92. [Google Scholar] [CrossRef]
- Xavier, B.C.; Silva, I.O.; Guimaraes, L.G.; Gallo, M.N.; Ribeiro, C.P.; Figueiredo, A.G., Jr. Estimation of suspended sediment concentration by acoustic scattering: An experimental and theoretical analysis for spherical particles. J. Soils Sedim. 2014, 14, 1325–1333. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Suspended Sediment Concentration (mg/L) | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Dmean (mm) | 25 | 37.5 | 50 | 100 | 150 | 200 | 250 | 300 | 400 | 500 | 750 | 1000 | 1500 | 2000 | 3000 |
| 0.420 | + | + | + | + | + | + | + | + | + | + | + | + | + | + | + |
| 0.325 | + | + | + | + | + | + | + | + | + | + | + | + | + | + | - |
| 0.215 | + | + | + | + | + | + | + | + | + | + | + | + | + | - | - |
| 0.165 | + | + | + | + | + | + | + | + | - | + | - | - | - | - | - |
| 0.112 | + | + | + | + | + | - | - | - | - | - | - | - | - | - | - |
| Sample Name | Percentage of Each Sieve Fraction (% Mass) | Cg (D90/D10) | Dmean (mm) | Sieve Numbers of Fractions Used |
|---|---|---|---|---|
| Mix I | 20 | 5.19 | 0.258 | 40, 60, 80, 100, 200 |
| Mix II | 25 | 3.2 | 0.295 | 40, 60, 80, 100 |
| Mix III | 25 | 6.29 | 0.281 | 40, 60, 80, 200 |
| Mix IV | 25 | 6.13 | 0.239 | 40, 80, 100, 200 |
| Mix V | 25 | 2.8 | 0.208 | 60, 80, 100, 200 |
| Dmean (mm) | Concentration Range (mg/L) |
|---|---|
| 0.325 | 100–750 |
| 0.215 | 50–300 |
| 0.165 | 25–200 |
| 0.112 | 25–150 |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Öztürk, M. Sediment Size Effects in Acoustic Doppler Velocimeter-Derived Estimates of Suspended Sediment Concentration. Water 2017, 9, 529. https://doi.org/10.3390/w9070529
Öztürk M. Sediment Size Effects in Acoustic Doppler Velocimeter-Derived Estimates of Suspended Sediment Concentration. Water. 2017; 9(7):529. https://doi.org/10.3390/w9070529
Chicago/Turabian StyleÖztürk, Mehmet. 2017. "Sediment Size Effects in Acoustic Doppler Velocimeter-Derived Estimates of Suspended Sediment Concentration" Water 9, no. 7: 529. https://doi.org/10.3390/w9070529
APA StyleÖztürk, M. (2017). Sediment Size Effects in Acoustic Doppler Velocimeter-Derived Estimates of Suspended Sediment Concentration. Water, 9(7), 529. https://doi.org/10.3390/w9070529