The Augmented Approach towards Equilibrated Nexus Era into the Wireless Rechargeable Sensor Network


Abstract
:1. Introduction
1.1. Milieu and Impetus
1.2. Functions
- The mobile data compilation and charging path optimization problem formulation for determining an efficient charging schedule for the wireless charging device.
- The concepts of connectivity matrix, shortest hop matrix, and sensor node aptness are commenced to achieve the connection and distance relationship flanked by sensor nodes to augment the idle time of the wireless charging vehicle.
- Development of a PSO-based virtual clustering technique is presented during the routing process to replenishing the energy of the sensor nodes.
- A mobile data compilation and charging path optimization strategy dependent on the wireless charging device is proposed. The approach classified into three parts: the selection of cluster head nodes using the PSO-based virtual clustering approach, the establishment of data collection clusters and the shortest path planning. First, the cluster head node set determines according to the residual energy of the SNs and the connection relationship between the sensor nodes. Secondly, the data collection cluster has established. Finally, the wireless charging vehicle collects data and charges according to the path determined by the shortest path optimization strategy.
1.3. The Architecture of the Manuscript
2. Akin Literature
2.1. Wireless Power Transfer
2.2. Analogous Study
3. The Framework of the Present Study
3.1. Problem Sketch
3.2. Sculpt of Network
- The WCD initiates its operation from the maintenance station and traverses the battery of the sensor node on the specified path in a specific order.
- During this time, the WCD moves to the node and recharges its battery wirelessly using wireless power transfer. When the battery of the node is charged to , the wireless charging device leaves the SN and moves to the next SN to charge it. Also, represents the charging duration of the wireless charging device spends in each charging cycle.
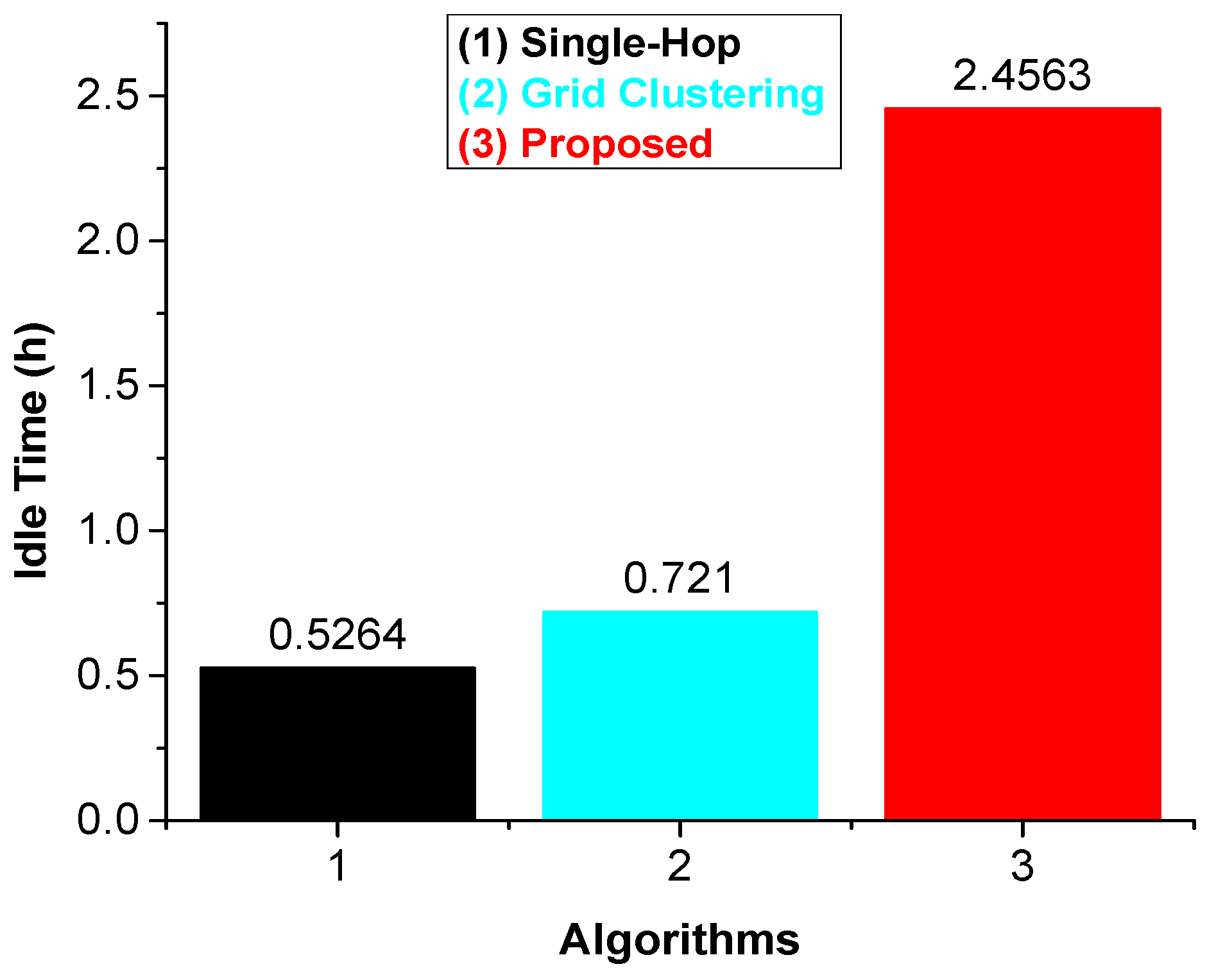
- Once the wireless charging device traverses all the nodes in the WRSN, the WCD proceeds towards to the maintenance station for maintenance (e.g., replenishing the battery or replacing the battery). The maintenance time of the WCD at the maintenance station is the idle time, indicate as . After replenishing itself, the wireless charging device initiates to move for the next charging cycle. represents the duration of each charging cycle. Furthermore, Notations used in this paper presented in Table 1.
- Based on wireless charging device, the charging energy is inadequate, along with the energy utilization of the sensor nodes disseminated in the wireless rechargeable sensor network is not equilibrated. Subsequently, the energy of the sensor nodes near the center of the base station is generally higher. The node replenishment energy and charging time need to be considered comprehensively.
- Considering that the charging plan is to ensure that the WRSNs work persistently and effectively. Consequently, the charging plan deliberated in this paper is dependent on periodicity. Additionally, the charging cycle of the wireless charging device for the energy utilization of a sensor node in the network should assure the following points.
3.3. Problem Framework
4. Charging Path for Wireless Charging Device
4.1. Dijkstra Algorithm and Shortest Hop Number Solution
4.2. Dijkstra Algorithm
4.3. Solution Steps
4.4. Network Parameters
5. Particle Swarm Optimization (PSO) Routing Algorithm.
5.1. Particle Swarm Optimization
5.2. Clustering with Particle Swarm Optimization
| Algorithm 1: Proposed PSO-based Clustering Algorithm |
| 1. Initialize the swarm size (N), dimension (D) of the particle position X 2.//Initialize the particle position 3. for i = 1 to N 4. for j = 1 to D 5. X(i,j) = Xmin + (Xmax − Xmin) × rand(i,j); 6. end for 7. fit(i) = F(X(i))//calculate the objective function value 8. end for 9. //Initialize the velocity of particles V 10. for i = 1 to N 11. for j = 1 to D 12. V(i,j) = Vmin + (Vmax − Vmin) × rand(i,j); 13. end for 14. end for 15. Xpbest = X; pbest = fit; gbest = Inf; 16. // update the velocity and particle position 17. while (termination criteria) 18. for i = 1 to N 19. for j = 1 to D 20. V(i,j) = w*V(i,j) + C1*rand()*(Xpbest(i,j) − X(i,j)) + C2*rand()*(Xgbest(j) − X(i,j)); 21. X(i,j) = X(i,j) + V(i,j); 22. end for 23. fit(i) = F(X(i)) //calculate the objective function value 24. if fit(i) < pbest(i) then //update the pbest 25. pbest(i) = fit(i); 26. end if 27. if fit(i) < gbest then //update the gbest 28. gbest = fit(i); 29. end if 30. end for 31. end while |
5.3. Selection of Cluster Head
6. Simulation and Experiment Analysis
6.1. Simulation
6.2. Experiment Analysis
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Anastasi, G.; Conti, M.; Di Francesco, M.; Passarella, A. Energy conservation in wireless sensor networks: A survey. Ad Hoc Netw. 2009, 7, 537–568. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.; Ming, Y.; Chakraborty, S.; Iram, S. A comprehensive survey on real-time applications of wsn. Future Internet 2017, 9, 77. [Google Scholar] [CrossRef]
- He, S.; Chen, J.; Jiang, F.; Yau, D.K.; Xing, G.; Sun, Y. Energy provisioning in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2013, 12, 1931–1942. [Google Scholar] [CrossRef]
- Petrioli, C.; Spenza, D. Poster: Pro-Energy: A Novel Energy Prediction Model for Solar and Wind Energy Harvesting Wsns. In Proceedings of the 9th International Conference on Mobile Ad-Hoc and Sensor Systems (MASS 2012), Las Vegas, NV, USA, 8–11 October 2012. [Google Scholar]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljačić, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Fu, L.; Cheng, P.; Gu, Y.; Chen, J.; He, T. Optimal charging in wireless rechargeable sensor networks. IEEE Trans. Veh. Technol. 2016, 65, 278–291. [Google Scholar] [CrossRef]
- Xu, J.; Liu, L.; Zhang, R. Multiuser miso beamforming for simultaneous wireless information and power transfer. IEEE Trans. Signal Process. 2014, 62, 4798–4810. [Google Scholar] [CrossRef]
- Lu, X.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless charging technologies: Fundamentals, standards, and network applications. IEEE Commun. Surv. Tutor. 2016, 18, 1413–1452. [Google Scholar] [CrossRef]
- Khaligh, A.; Zeng, P.; Zheng, C. Kinetic energy harvesting using piezoelectric and electromagnetic technologies—State of the art. IEEE Trans. Ind. Electron. 2010, 57, 850–860. [Google Scholar] [CrossRef]
- Liang, W.; Xu, W.; Ren, X.; Jia, X.; Lin, X. Maintaining large-scale rechargeable sensor networks perpetually via multiple mobile charging vehicles. ACM Trans. Sens. Netw. 2016, 12, 14. [Google Scholar] [CrossRef]
- Lu, X.; Niyato, D.; Kim, D.I.; Maso, M.; Han, Z. Wireless powered communication networks: Research directions and technological approaches. IEEE Wirel. Commun. 2017, 24, 88–97. [Google Scholar]
- Ali, A.; Ming, Y.; Si, T.; Iram, S.; Chakraborty, S. Enhancement of rwsn lifetime via firework clustering algorithm validated by ann. Information 2018, 9, 60. [Google Scholar] [CrossRef]
- Aslam, N.; Xia, K.; Haider, M.T.; Hadi, M.U. Energy-Aware Adaptive Weighted Grid Clustering Algorithm for Renewable Wireless Sensor Networks. Future Internet 2017, 9, 54. [Google Scholar] [CrossRef]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Chen, Y.-C.; Jiang, J.-R. Particle swarm optimization for charger deployment in wireless rechargeable sensor networks. In Proceedings of the 2016 26th International Conference on Telecommunication Networks and Applications Conference (ITNAC), Dunedin, New Zealand, 7–9 December 2016; pp. 231–236. [Google Scholar]
- Jiang, J.-R.; Chen, Y.-C.; Lin, T.-Y. Particle swarm optimization for charger deployment in wireless rechargeable sensor networks. Int. J. Parallel Emerg. Distrib. Syst. 2018. [Google Scholar] [CrossRef]
- Lv, C.; Wang, Q.; Yan, W.; Shen, Y. Energy-balanced compressive data gathering in wireless sensor networks. J. Netw. Comput. Appl. 2016, 61, 102–114. [Google Scholar] [CrossRef]
- Tan, Y.K.; Panda, S.K. Review of Energy Harvesting Technologies for Sustainable Wsn. In Sustainable Wireless Sensor Networks; InTech: London, UK, 2010. [Google Scholar]
- Hu, C.; Wang, Y. Optimization of Charging and Data Collection in Wireless Rechargeable Sensor Networks. Int. Conf. Hum. Cent. Comput. 2016, 9567, 138–149. [Google Scholar]
- Nikoletseas, S.; Yang, Y.; Georgiadis, A. Wireless Power Transfer Algorithms, Technologies and Applications in ad hoc Communication Networks; Springer: Berlin, Germany, 2016. [Google Scholar]
- Krikidis, I.; Timotheou, S.; Nikolaou, S.; Zheng, G.; Ng, D.W.K.; Schober, R. Simultaneous wireless information and power transfer in modern communication systems. IEEE Commun. Mag. 2014, 52, 104–110. [Google Scholar] [CrossRef] [Green Version]
- PMA. Available online: http://www.powermatters.org/ (accessed on 27 August 2018).
- A4WP. Available online: http://a4wppmamerge.wwwssr6.supercp.com/ (accessed on 27 August 2018).
- WPC. Available online: http://www.wirelesspowerconsortium.com/ (accessed on 10 August 2018).
- Zhao, M.; Li, J.; Yang, Y. A framework of joint mobile energy replenishment and data gathering in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 2689–2705. [Google Scholar] [CrossRef]
- Xie, L.; Shi, Y.; Hou, Y.T.; Sherali, H.D. Making sensor networks immortal: An energy-renewal approach with wireless power transfer. IEEE/ACM Trans. Netw. 2012, 20, 1748–1761. [Google Scholar] [CrossRef]
- Peng, Y.; Li, Z.; Zhang, W.; Qiao, D. Prolonging Sensor Network Lifetime through Wireless Charging. In Proceedings of the 2010 IEEE 31st Conference on Real-Time Systems Symposium (RTSS), San Diego, CA, USA, 30 November–3 December 2010; pp. 129–139. [Google Scholar]
- Li, Z.; Peng, Y.; Zhang, W.; Qiao, D. J-roc: A joint routing and charging scheme to prolong sensor network lifetime. In Proceedings of the 2011 19th IEEE International Conference on Network Protocols, Vancouver, AB, Canada, 17–20 October 2011. [Google Scholar]
- Shi, Y.; Xie, L.; Hou, Y.T.; Sherali, H.D. On Renewable Sensor Networks with Wireless Energy Transfer. In Proceedings of the 2011 IEEE Conference on INFOCOM, Shanghai, China, 10–15 April 2011; pp. 1350–1358. [Google Scholar]
- Ren, X.; Liang, W.; Xu, W. Maximizing Charging Throughput in Rechargeable Sensor Networks. In Proceedings of the 2014 23rd International Conference on Computer Communication and Networks (ICCCN), Shanghai, China, 4–7 August 2014; pp. 1–8. [Google Scholar]
- Hu, C.; Wang, Y. Minimizing the Number of Mobile Chargers in a Large-Scale Wireless Rechargeable Sensor Network. In Proceedings of the 2015 IEEE Conference of Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 1297–1302. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D. On traveling path and related problems for a mobile station in a rechargeable sensor network. In Proceedings of the 14th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Bangalore, India, 29 July–1 August 2013; pp. 109–118. [Google Scholar]
- Akkaya, K.; Younis, M. An Energy-Aware Qos Routing Protocol for Wireless Sensor Networks. In Proceedings of the 23rd International Conference on Distributed Computing Systems Workshops, Providence, RL, USA, 19–22 May 2003; pp. 710–715. [Google Scholar]
- Wang, G.; Cao, G.; La Porta, T.; Zhang, W. Sensor Relocation in Mobile Sensor Networks, INFOCOM 2005. In Proceedings of the 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 March 2005; pp. 2302–2312. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| WCD | Wireless charging device |
| N | Sensor nodes (SNs) |
| BS | Base Station node |
| MS | Maintenance Station |
| The maximum battery capacity of sensor nodes | |
| The minimum energy required to SNs work properly | |
| Traveling speed of the wireless charging device | |
| The full charging power | |
| The data rate generates in the network at SN | |
| Communication radius | |
| The data flow rate in the network from SN to SN at the time | |
| The energy consumption coefficient for receiving the data | |
| The energy consumption for forwarding the data from SN to SN | |
| The rate of energy consumption from SN to SN at the time | |
| The time an SN in the network performs a charging task | |
| WCD spends the time to charge sensor node | |
| The wireless charging device at the service station for vacation | |
| The centroid | |
| xi, yi | The coordinates of SN |
| The time interval between centroid and sensor node | |
| Indicates the completion of one round of transmission cycle in WRSN |
| Parameters | Values |
|---|---|
| Network Size | 1000 m × 1000 m |
| Number of Nodes () | 25 |
| Initial energy ) | 10,800 J |
| Minimal energy ) | 540 J |
| Moving Speed | 5 m/S |
| Charging Power | 5 W |
| Communication radius (Rc) | 100 m |
| Path Loss | Log-Normal Shadowing |
| Antenna | Omni Directional |
| Charging Scheme | Grid Clustering, particle swarm optimization algorithm (PSO) |
| Simulation Period | 1 h |
| Properties Values | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Total Distance (m) | Traveling Time (s) | Charging Time (s) | |||||||
| Algorithms | 10 | 25 | 50 | 10 | 25 | 50 | 10 | 25 | 50 |
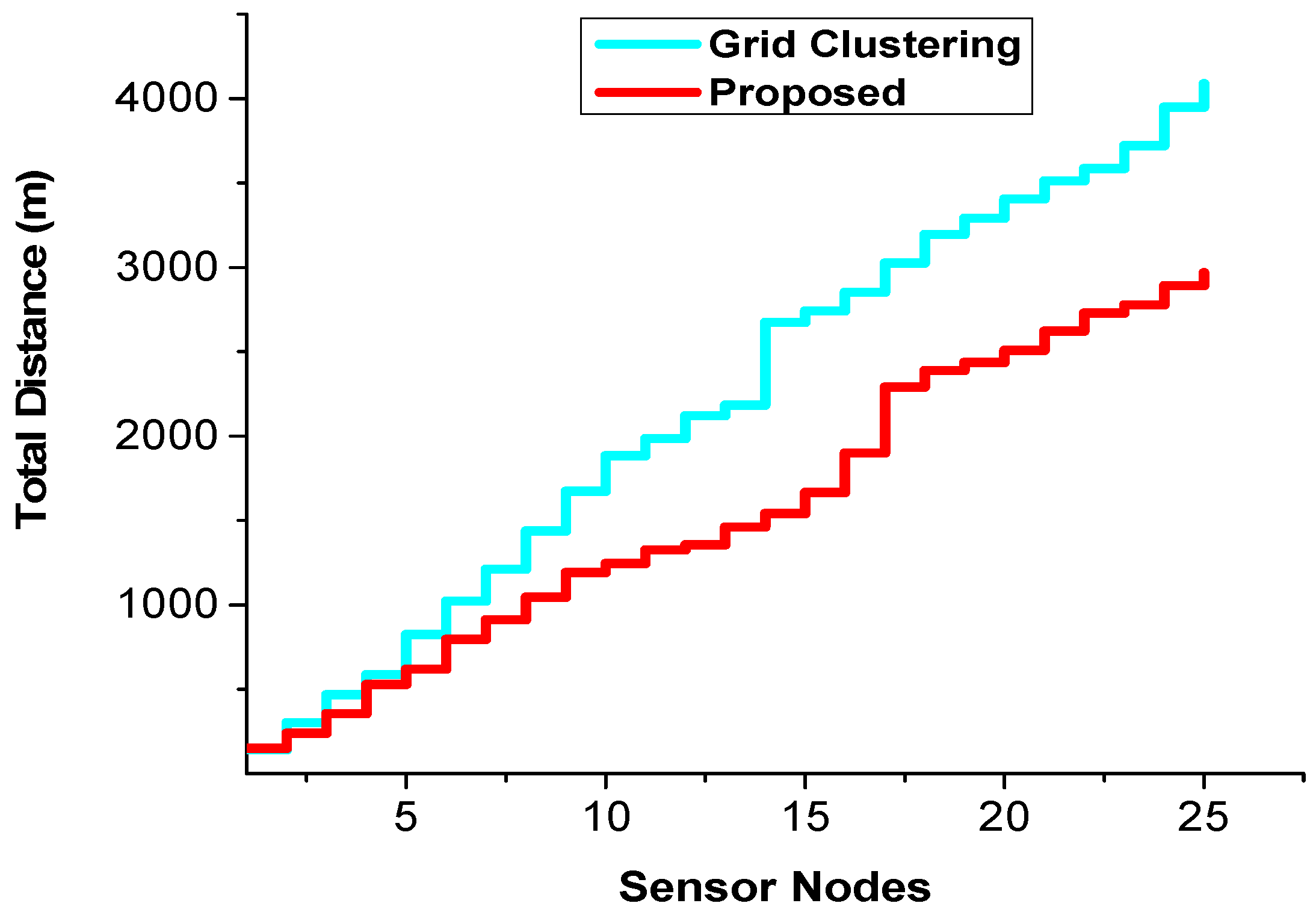
| Grid Clustering | 1884 | 4089 | 6763 | 376 | 817 | 1353 | 386 | 842 | 1395 |
| Proposed | 1245 | 2968 | 6142 | 249 | 593 | 1228 | 259 | 618 | 1277 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, A.; Ming, Y.; Chakraborty, S.; Iram, S.; Si, T. The Augmented Approach towards Equilibrated Nexus Era into the Wireless Rechargeable Sensor Network. Symmetry 2018, 10, 639. https://doi.org/10.3390/sym10110639
Ali A, Ming Y, Chakraborty S, Iram S, Si T. The Augmented Approach towards Equilibrated Nexus Era into the Wireless Rechargeable Sensor Network. Symmetry. 2018; 10(11):639. https://doi.org/10.3390/sym10110639
Chicago/Turabian StyleAli, Ahmad, Yu Ming, Sagnik Chakraborty, Saima Iram, and Tapas Si. 2018. "The Augmented Approach towards Equilibrated Nexus Era into the Wireless Rechargeable Sensor Network" Symmetry 10, no. 11: 639. https://doi.org/10.3390/sym10110639
APA StyleAli, A., Ming, Y., Chakraborty, S., Iram, S., & Si, T. (2018). The Augmented Approach towards Equilibrated Nexus Era into the Wireless Rechargeable Sensor Network. Symmetry, 10(11), 639. https://doi.org/10.3390/sym10110639