Total Variation Based Neural Network Regression for Nonuniformity Correction of Infrared Images

Abstract
:1. Introduction
2. Typical NN-NUC Method
3. TV-Regularized NN-NUC Algorithm
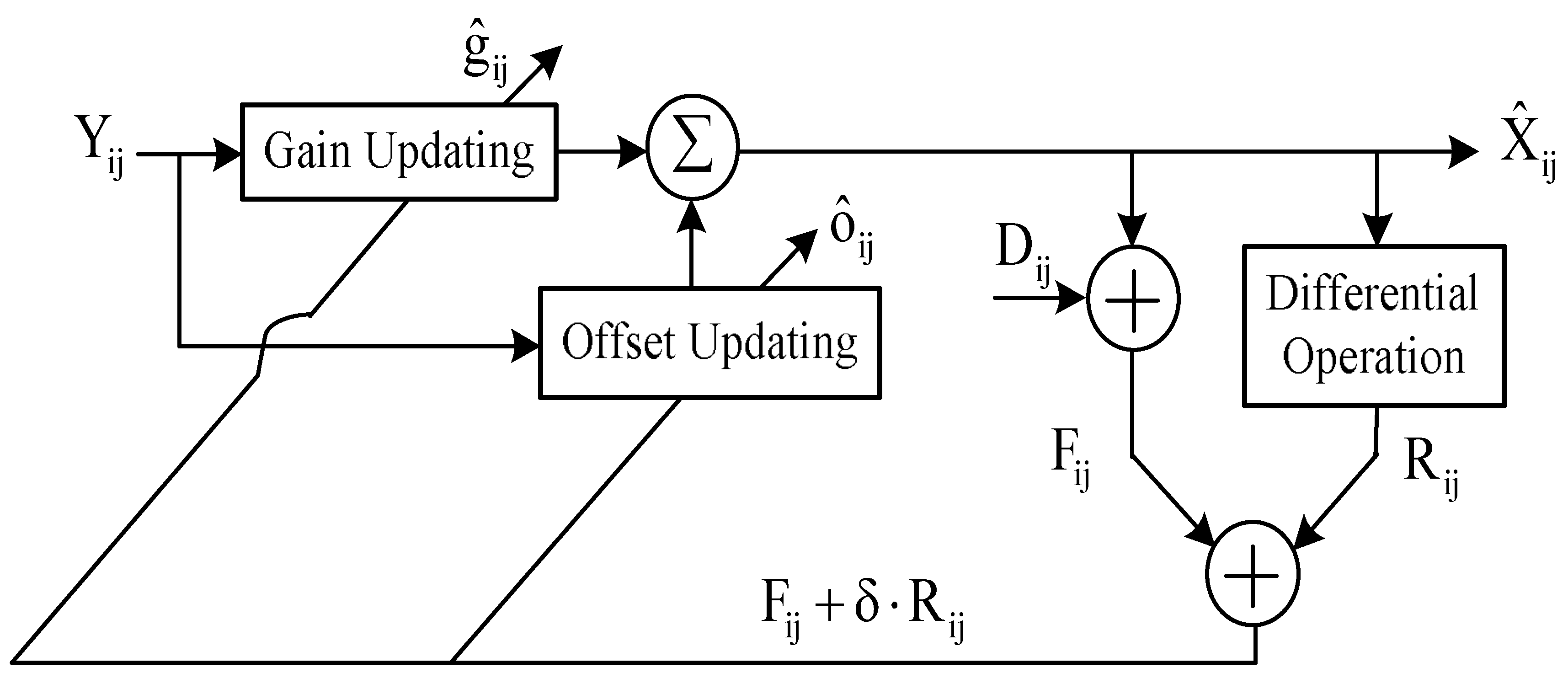
3.1. Scheme Description
3.2. Gated Adaptive Learning Rate
4. Experiments and Results Analysis
4.1. Simulation with Artificially Corrupted Data
4.1.1. Comparison of Ghost Suppression Performance
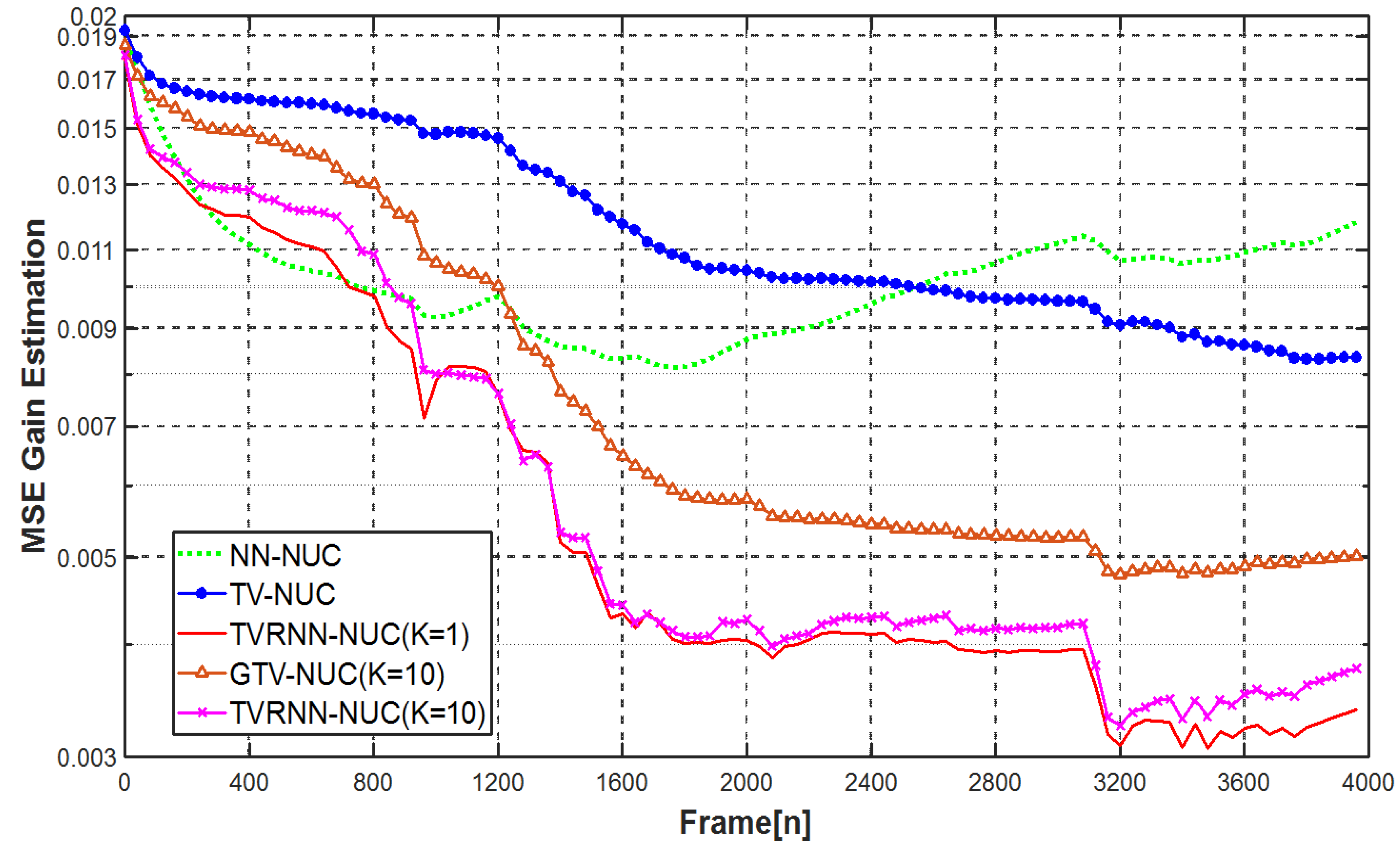
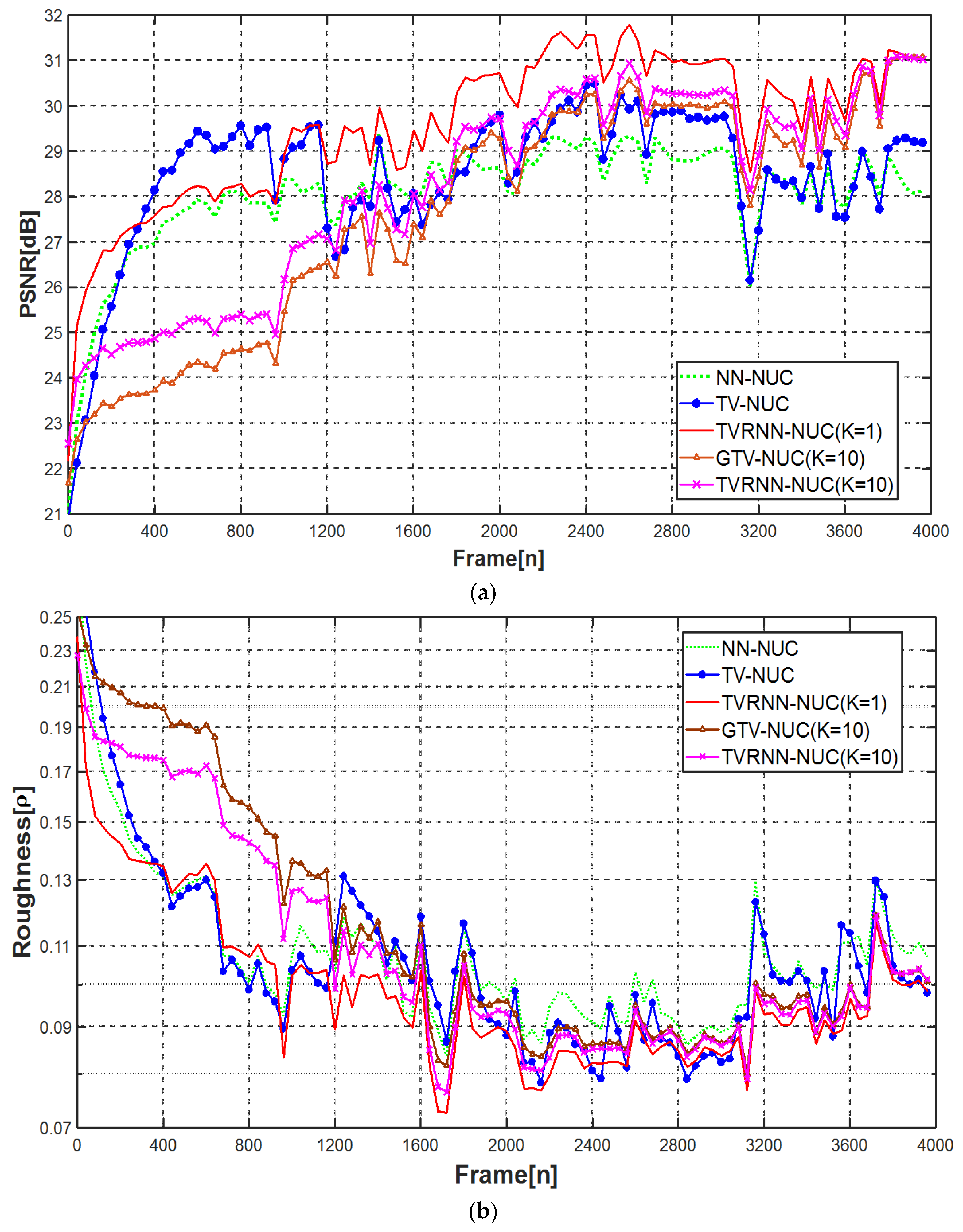
4.1.2. Comparison of Correction Precision and Convergence Rate
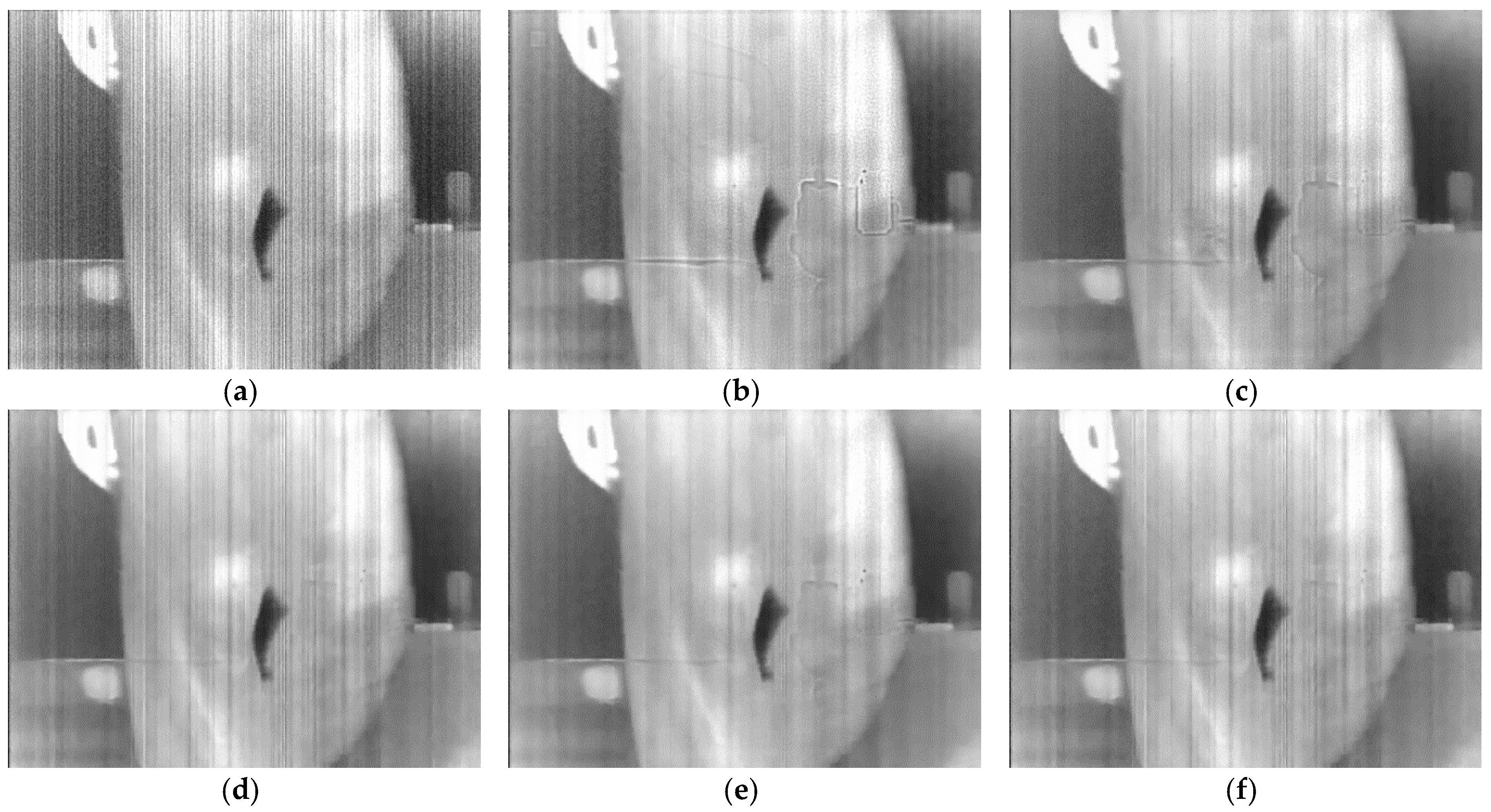
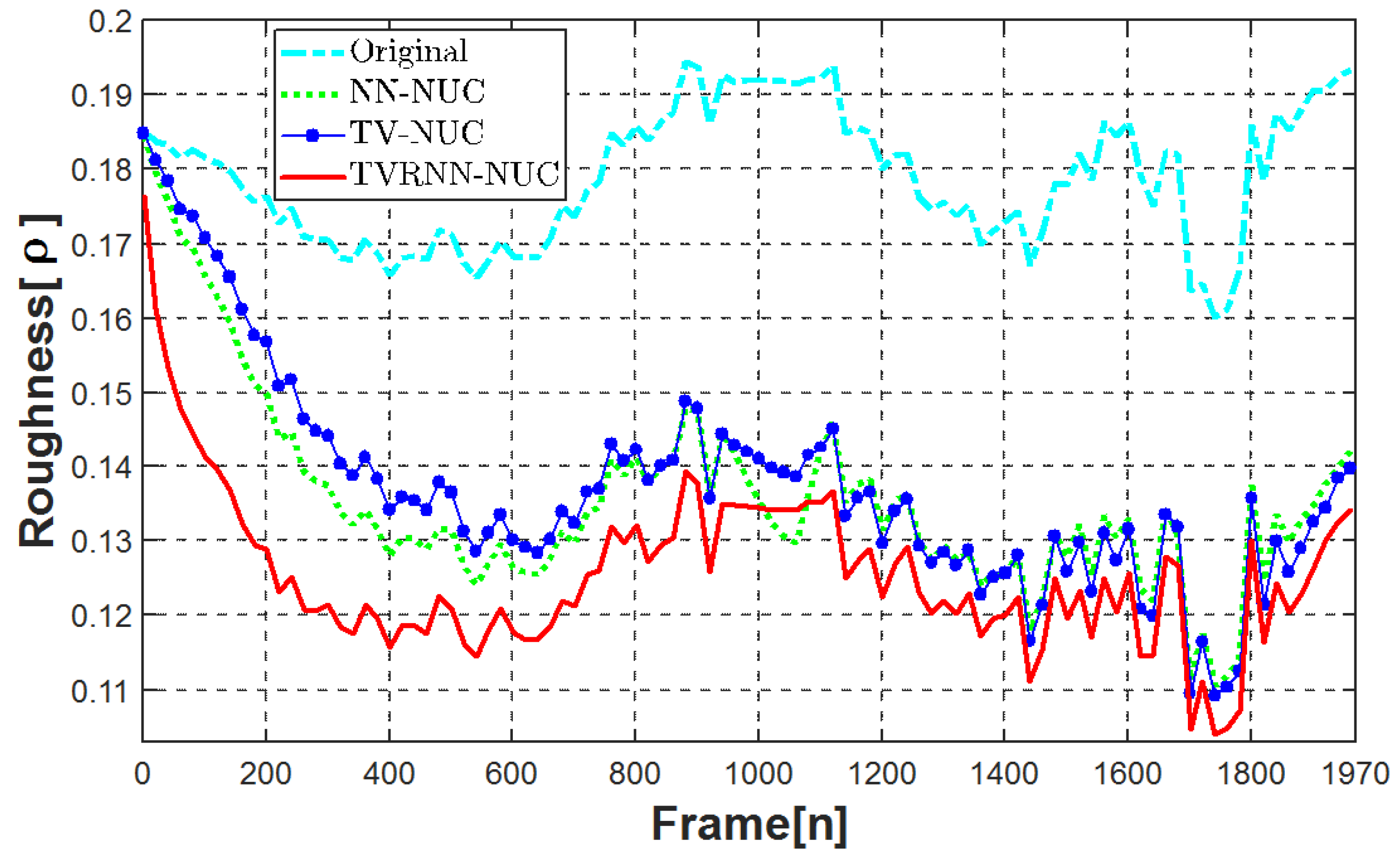
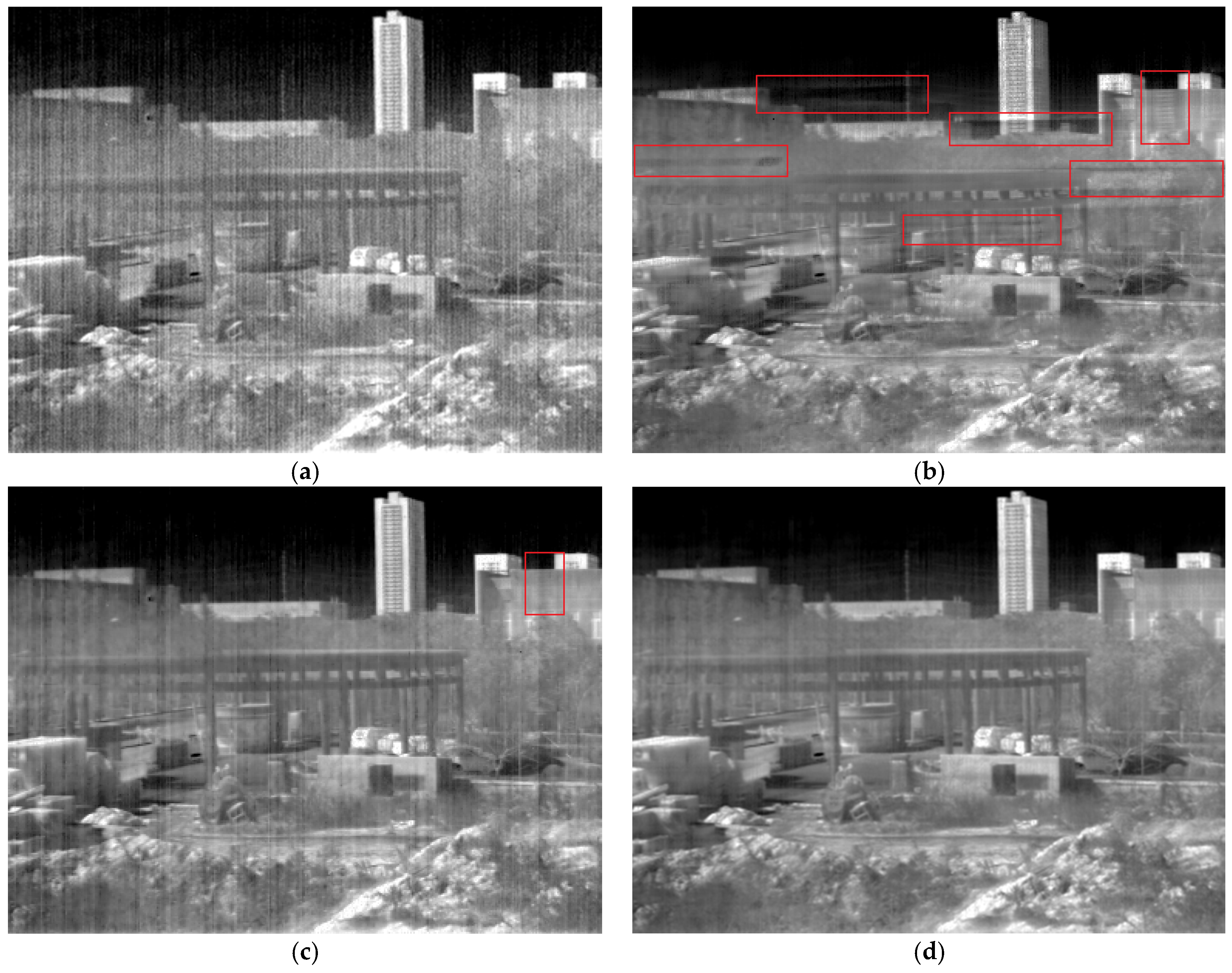
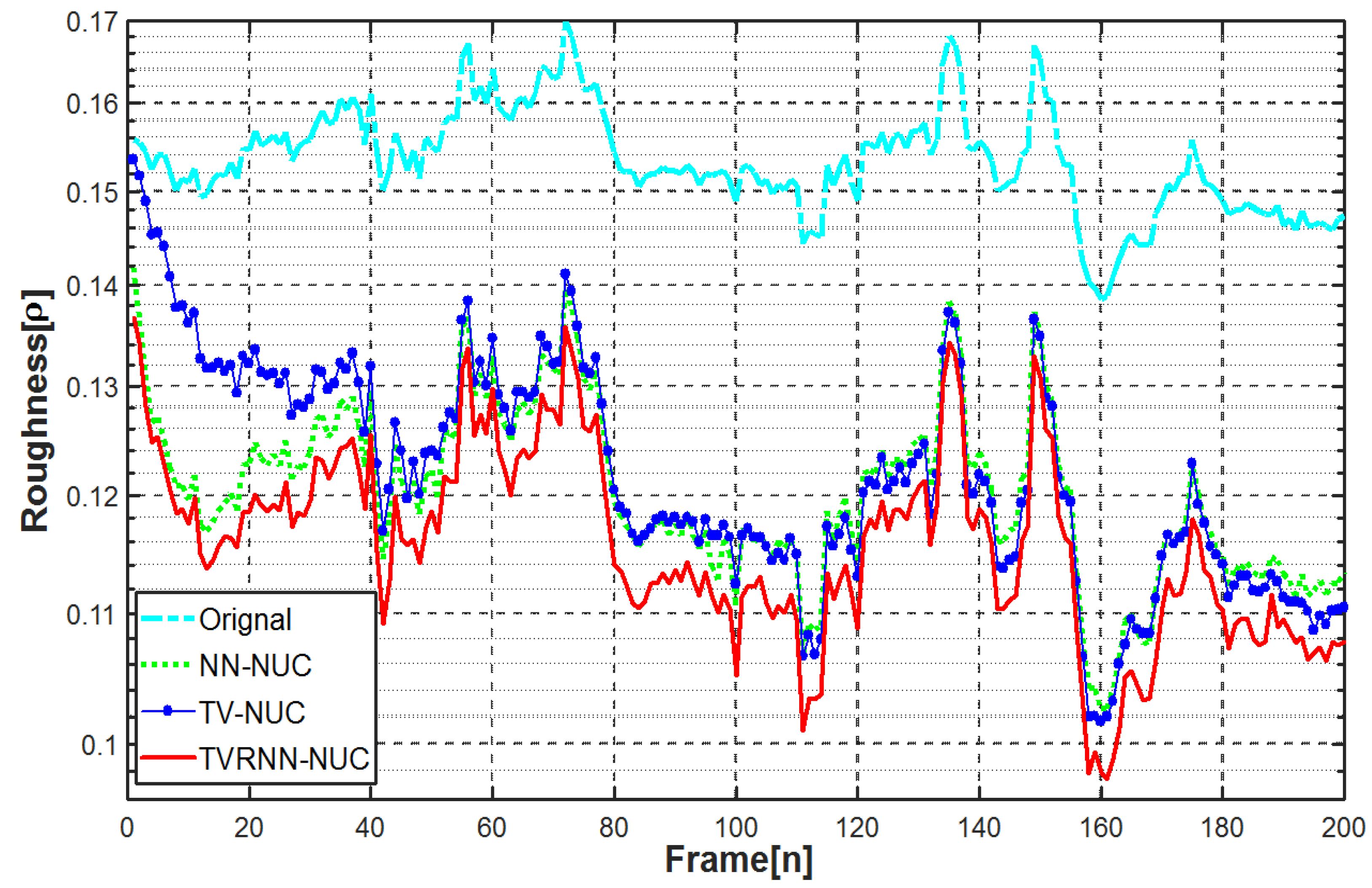
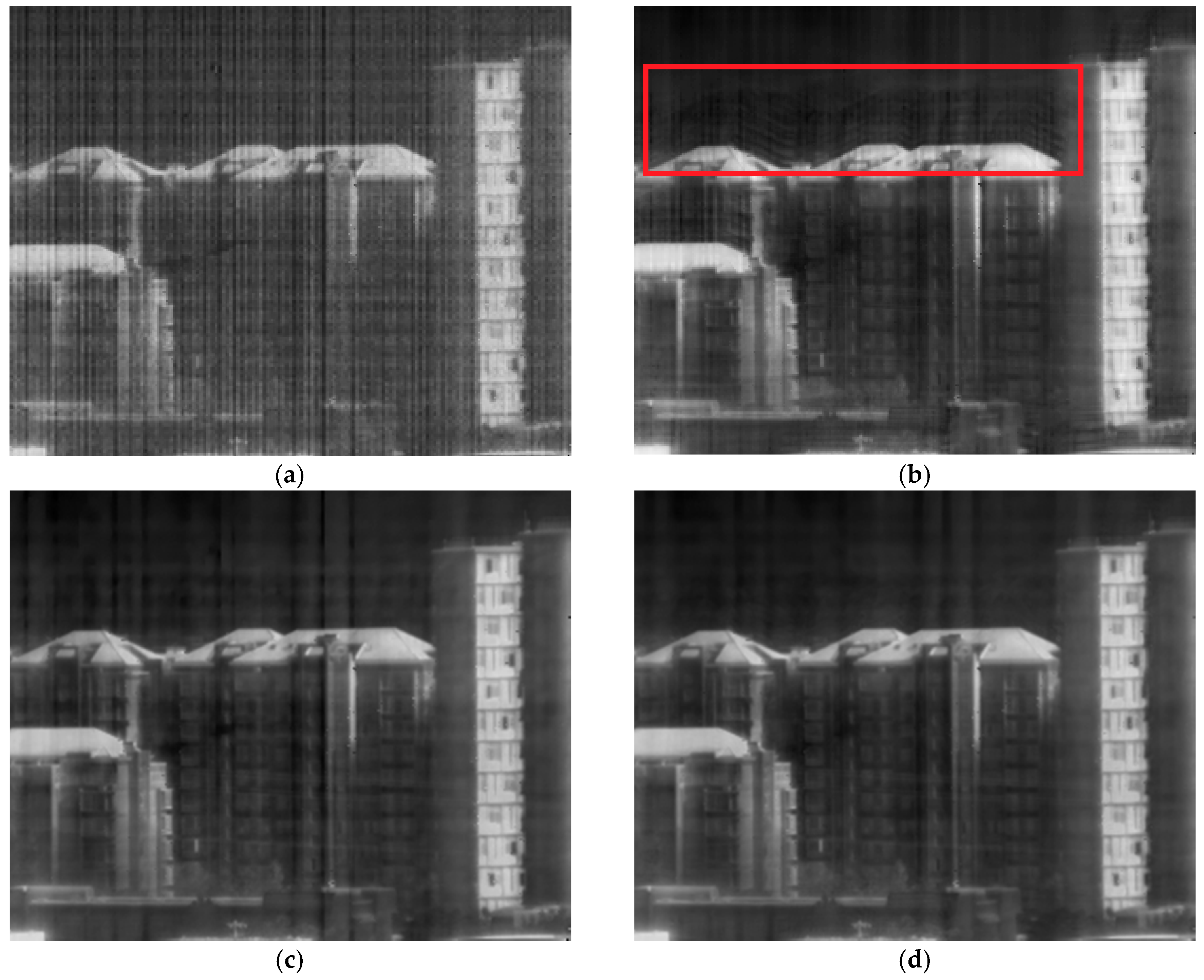
4.2. Applications to Real Infrared Image Sequences
4.3. Comparison of Real-Time Performance
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Scribner, D.A.; Sarkady, K.A.; Kruer, M.R.; Caulfield, J.T.; Hunt, J.; Colbert, M.; Descour, M. Adaptive Retina-like Preprocessing for Imaging Detector Arrays. In Proceedings of the IEEE International Conference on Neural Networks, San Francisco, CA, USA, 28 March–1 April 1993; Volume 3, pp. 1955–1960. [Google Scholar]
- Harris, J.G.; Chiang, Y.-M. Minimizing the Ghosting Artifact in Scene-Based Nonuniformity Correction. In Proceedings of the SPIE Conference on Infrared Imaging Systems: Design Analysis, Modeling, and Testing IX, Orlando, FL, USA, 15–16 April 1998; Volume 3377, pp. 106–113. [Google Scholar]
- Harris, J.; Chiang, Y. Nonuniformity correction of infrared image sequences using the constant-statistics constraint. IEEE Trans. Image Process. 1999, 8, 1148–1151. [Google Scholar] [CrossRef] [PubMed]
- Qian, W.; Chen, Q.; Gu, G. Space low-pass and temporal high-pass nonuniformity correction algorithm. Opt. Rev. 2010, 17, 24–29. [Google Scholar] [CrossRef]
- Bai, J.; Chen, Q.; Qian, W.; Wang, X. Ghosting reduction in scene-based nonuniformity correction of infrared image sequences. Chin. Opt. Lett. 2010, 8, 1113–1116. [Google Scholar]
- Zuo, C.; Chen, Q.; Gu, G.; Qian, W. New temporal high-pass filter nonuniformity correction based on bilateral filter. Opt. Rev. 2011, 18, 197–202. [Google Scholar] [CrossRef]
- Vera, E.; Torres, S. Fast adaptive nonuniformity correction for infrared focal plane array detectors. EURASIP J. Appl. Signal Process. 2005, 13, 1994–2004. [Google Scholar] [CrossRef]
- Hardie, R.C.; Baxley, F.; Brys, B.; Hytla, P. Scene-Based Nonuniformity Correction with Reduced Ghosting Using a Gated LMS Algorithm. Opt. Express 2009, 17, 14918–14933. [Google Scholar] [CrossRef] [PubMed]
- Rui, L.; Yin-Tang, Y.; Duan, Z.; Yue-Jin, L. Improved neural network based scene-adaptive nonuniformity correction method for infrared focal plane arrays. Appl. Opt. 2008, 47, 4331–4335. [Google Scholar] [CrossRef]
- Zhang, T.; Shi, Y. Edge-directed adaptive nonuniformity correction for staring infrared focal plane arrays. Opt. Eng. 2006, 45, 016402-1-11. [Google Scholar] [CrossRef]
- Rossi, A.; Diani, M. Bilateral filter-based adaptive nonuniformity correction for infrared focal-plane array systems. Opt. Eng. 2010, 49, 057003-1-13. [Google Scholar] [CrossRef]
- Sheng-Hui, R.; Hui-Xin, Z.; Han-Lin, Q.; Rui, L.; Kun, Q. Guided filter and adaptive learning rate based non-uniformity correction algorithm for infrared focal plane array. Infrared Phys. Technol. 2016, 76, 691–697. [Google Scholar] [CrossRef]
- Zhaolong, L.; Tongsheng, S.; Shuli, L. Scene-based nonuniformity correction based on bilateral filter with reduced ghosting. Infrared Phys. Technol. 2016, 77, 360–365. [Google Scholar]
- Yu, H.; Zhang, Z.; Wang, C. An improved retina-like nonuniformity correction for infrared focal-plane array. Infrared Phys. Technol. 2015, 73, 62–72. [Google Scholar] [CrossRef]
- Zhang, B.H.; Zhang, J.J.; Xu, H. A Nonuniformity Correction Enhancement Method Based on Temporal Statistical for Infrared System. In Proceedings of the IEEE International Symposium on Photonics and Optoelectronics, Shanghai, China, 21–23 May 2012; pp. 1–4. [Google Scholar]
- Boutemedjet, A.; Deng, C.; Zhao, B. Robust Approach for Nonuniformity Correction in Infrared Focal Plane Array. Sensors. 2016, 16, 1890. [Google Scholar] [CrossRef] [PubMed]
- Tang, L.; Fang, Z. Edge and contrast preserving in total variation image denoising. EURASIP J. Adv. Signal Process. 2016, 13, 2–21. [Google Scholar] [CrossRef]
- David, S.; Chan, T. Edge-preserving and scale-dependent properties of total variation regularization. Inverse Probl. 2003, 19, 165–187. [Google Scholar]
- Kwong, R.; Johnston, E.W. A Variable Step Size LMS Algorithm. IEEE Trans. Signal Process. 1992, 40, 1633–1642. [Google Scholar] [CrossRef]
- Vera, E.; Meza, P.; Torres, S. Total variation approach for adaptive nonuniformity correction in focal-plane arrays. Opt. Lett. 2011, 36, 172–174. [Google Scholar] [CrossRef] [PubMed]
- Hayat, M.M.; Torres, S.N.; Armstrong, E.; Cain, S.C.; Yasuda, B. Statistical algorithm for nonuniformity correction in focal-plane arrays. Appl. Opt. 1999, 38, 772–780. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Metrics | FPN-Corrupted Image | Corrected Images | ||||
|---|---|---|---|---|---|---|
| NN-NUC | TV-NUC | GTV-NUC | TVRNN-NUC (k = 1) | TVRNN-NUC (k = 10) | ||
| PSNR (dB) | 20.29 | 28.10 | 28.31 | 27.73 | 29.63 | 28.27 |
| ρ | 0.2760 | 0.1093 | 0.1083 | 0.1191 | 0.0999 | 0.1122 |
| Performance Metrics | FPN-Corrupted Image | Corrected Images | ||||
|---|---|---|---|---|---|---|
| NN-NUC | TV-NUC | GTV-NUC | TVRNN-NUC (k = 1) | TVRNN-NUC (k = 5) | ||
| PSNR (dB) | 22.17 | 32.55 | 33.34 | 29.84 | 36.65 | 33.34 |
| ρ | 0.3708 | 0.0927 | 0.1041 | 0.1354 | 0.0719 | 0.1029 |
| Index | NN-NUC | TV-NUC | GTV-NUC | TVRNN-NUC |
|---|---|---|---|---|
| Sequence 1 (471 × 358) | 272 | 210 | 46 | 43 |
| Sequence 2 (532 × 478) | 199 | 115 | 31 | 28 |
| Sequence 3 (384 × 288) | 580 | 442 | 86 | 81 |
| Sequence 4 (320 × 256) | 628 | 549 | 112 | 99 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, R.; Yue, G.; Zhang, G. Total Variation Based Neural Network Regression for Nonuniformity Correction of Infrared Images. Symmetry 2018, 10, 157. https://doi.org/10.3390/sym10050157
Lai R, Yue G, Zhang G. Total Variation Based Neural Network Regression for Nonuniformity Correction of Infrared Images. Symmetry. 2018; 10(5):157. https://doi.org/10.3390/sym10050157
Chicago/Turabian StyleLai, Rui, Gaoyu Yue, and Gangxuan Zhang. 2018. "Total Variation Based Neural Network Regression for Nonuniformity Correction of Infrared Images" Symmetry 10, no. 5: 157. https://doi.org/10.3390/sym10050157
APA StyleLai, R., Yue, G., & Zhang, G. (2018). Total Variation Based Neural Network Regression for Nonuniformity Correction of Infrared Images. Symmetry, 10(5), 157. https://doi.org/10.3390/sym10050157