1. Introduction
A plane mirror generates a plane symmetric shape of an object in the mirror. However, when we see an object and its mirror image, we do not necessarily perceive a symmetric pair of shapes because optical illusion occurs. This phenomenon has been used by artists. For example, Shigeo Fukuda’s “Underground Piano” (1984) appears to be a random collection of 3D pieces, but we perceive a grand piano when we see its mirror reflection from a special viewpoint [
1]. Moreover, Markus Raetz’s “Looking Glass II” (1988–1992) appears to be a front side silhouette of a face, while its mirror image appears to be the back side of the face [
1]. Another example of his artwork, “Hasenspiegel” (1988), is a rabbit made of bent wire, the mirror image of which becomes a man wearing a hat. Other tricks using plane mirrors have also been discussed by Ruiz and Robinson [
2].
Seeing an object in a mirror is essentially the same as seeing the object from another viewpoint. In this sense, multiple-silhouette sculptures belong to the same group of art. Fukuda’s “Encore” (1976) shows both a silhouette of a violinist and a silhouette of a pianist when viewed from two mutually orthogonal directions [
3,
4]. Similarly, Guido Moretti’s wire frame art “Cube to Non-Cube” (1997) presents the silhouettes of both a cube and of the Penrose triangle [
4]. Other similar ambiguous wire frames can be found on the Internet, e.g., the two giraffes in Matthieu Robert-Ortis’ “La Révolution des Girafes” (2015) change into an elephant when the viewer moves from one particular viewpoint to another.
Another way to see an object from two viewpoints is to project the shadow of the object onto a plane using a point light source. Fukuda’s “Lunch with a Helmet On” (1987) is a meaningless collection of spoons, forks and knives, but its shadow takes the shape of a motorcycle. Larry Kagan’s “Apache” (2013) is a random collection of wires, but its shadow forms a helicopter. Similarly, he made many shapes, such as an insect, a chair, a bird and a book, by the shadows of tangled wires. He also fused the wire and its shadow so that the shadow shows a hand grasping a torch, while the original wire appears as flames and smoke.
These illusions appear to have been constructed by artists’ inspiration and trial-and-error processes.
Recently, a systematic method was proposed to create objects called ambiguous cylinders [
5], where an object changes its appearance drastically in its mirror reflection; for example, a circle changes to a square or a flower changes to a butterfly. The same concept was also applied to other variations of anomalous behaviors of mirror reflections, such as the disappearance of parts of objects [
6], the disturbance of topology [
7], height reversal [
8] and right-left reversal [
9]. Similar design algorithms were also studied for wire frame art. For a given pair of line drawings, a 3D wire frame structure can be constructed systematically so that it gives the same appearances as the two given line drawings when the structure is observed from two particular viewpoints [
10].
In the present paper, we apply the design method for ambiguous cylinders to the construction of a new class of anomalous objects that themselves are not initially complete, but become complete when fused with their mirror images.
We first present a typical example (
Section 2), then present a design method (
Section 3) and discuss the conditions for the realizability of the objects (
Section 4). Finally, we present further examples (
Section 5).
2. Introductory Example
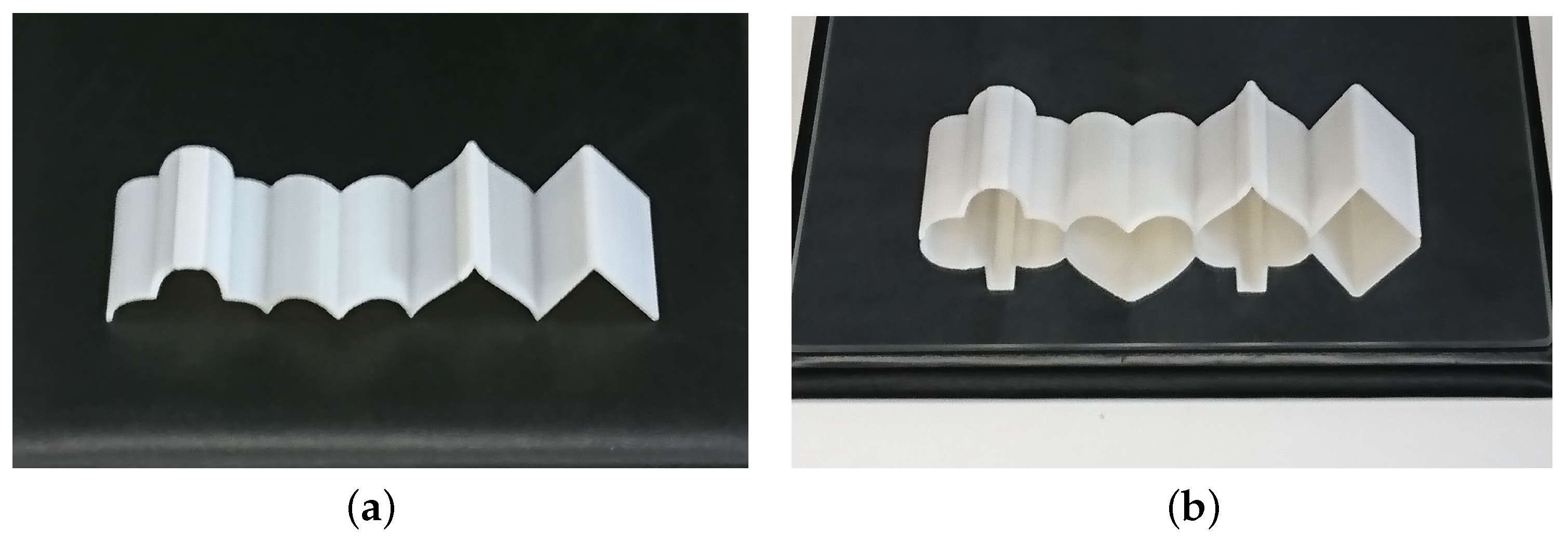
A typical example of an object made by the design principle proposed in the present paper is shown in
Figure 1, where (a) is a photograph of the object placed on a mat plate and (b) is a photograph of the same object placed on a plane mirror. We can see that the object itself is nonsense, but makes sense when fused with the mirror image. Note that the upper half, corresponding to the object, does not appear symmetric to the lower half, corresponding to the mirror image, although the mirror image should be symmetric to the original object.
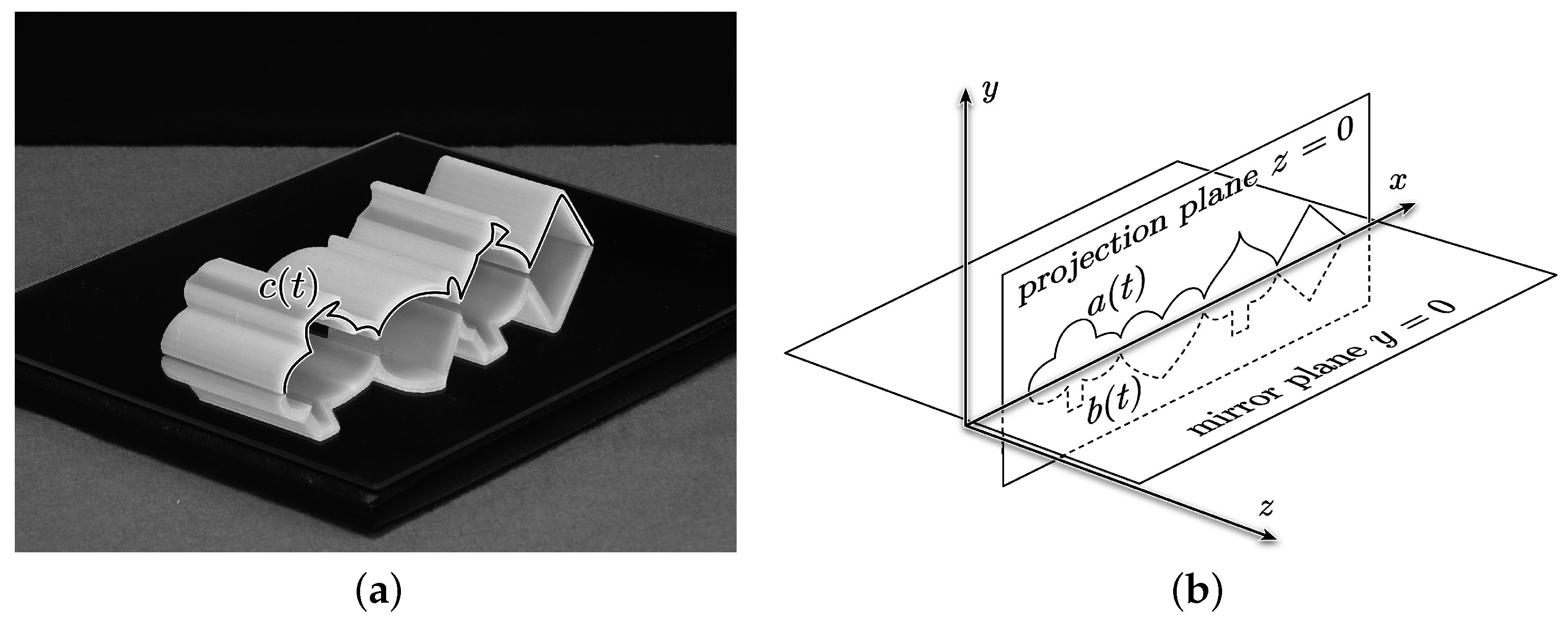
Figure 2 describes a rough idea about how to construct this object. Although the symbols in this figure will be defined in the next section, let us understand at present that
and
are plane curves and
is a space curve.
Figure 2a shows another view of the object in
Figure 1; we can see that the true shape is different from the perceived shape based on
Figure 1a.
Figure 1a may give the impression that the object is part of a cylinder having sides that are cut by planes perpendicular to the axis of the cylinder. However, the side curve is a space curve instead of a plane curve, as can be seen in
Figure 2a. As shown in
Figure 2b, we first give a shape that we want to create on the vertical plane
and divide it into the upper part (solid curve
) and the lower part (broken curve
). Next, we construct space curve
in such a way that it matches the upper curve
, and its mirror image matches the lower curve
when they are seen along a special view direction. Finally, we move the space curve
in the
z direction and adopt the swept surface as the object. Because of this construction, the length along the axis is the same wherever it is measured, which consequently gives an incorrect impression that the side curves are planar and perpendicular to the axis. This impression is actually observed empirically and can be explained by the preference of the human brain for right angles [
11].
3. Reflective Fusion
Suppose that an
Cartesian coordinate system is fixed in the 3D space
S. For any point
, we define
by
. Intuitively, we place a mirror on the
plane, and
is the mirror image of
p. Similarly for any vector
in
S, we define
. Let:
be two continuous curves in the
plane, where
is a parameter that moves from zero to one. See
Figure 2b for an illustration. We assume that the following conditions are satisfied.
- Condition 1.
Neither nor has self-intersections,
- Condition 2.
, and ,
- Condition 3.
for any ,
- Condition 4.
for any .
Because the two curves have the same start point and the same end point (Condition 2), they together form a closed curve, and because of Conditions 1 and 3, this closed curve has no self-intersection. We call this closed curve the target shape specified by and . Note that Condition 4 implies that the points on the two curves have a one-to-one correspondence and that the corresponding pair of points has the same x coordinate. Note also that the start and end points of the two curves are on the plane because of the third equation in Condition 2.
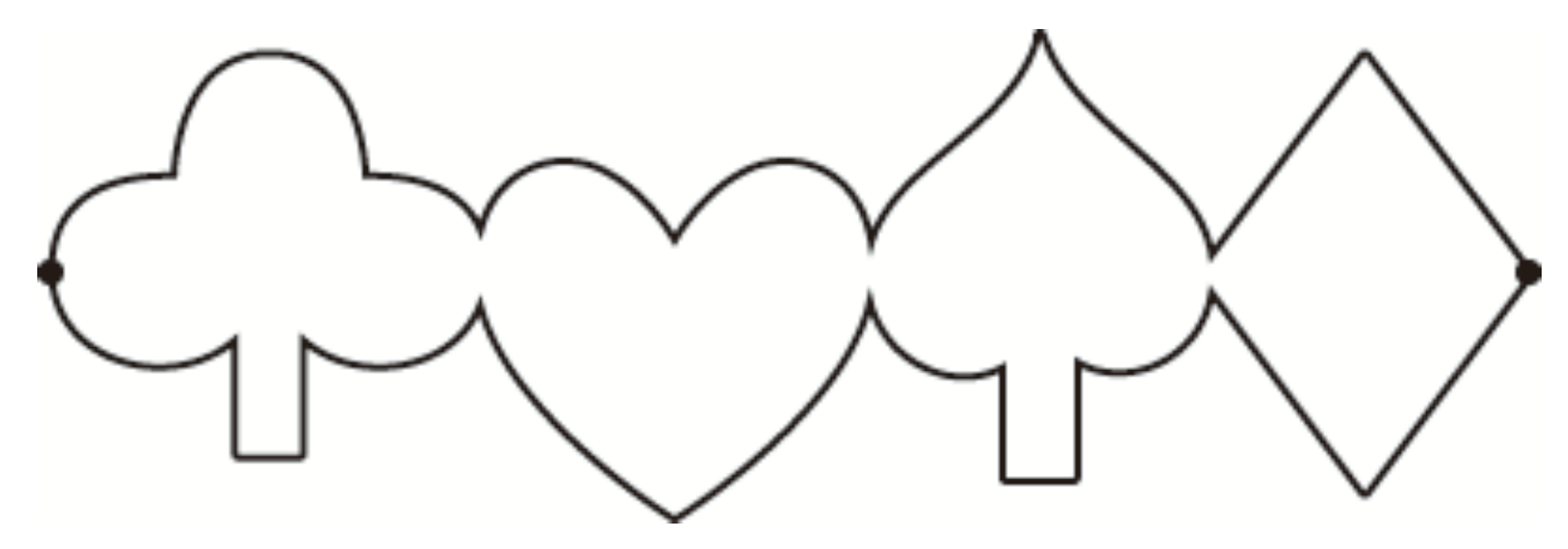
For example, consider the closed curve shown in
Figure 3. Let us divide this curve at the leftmost point and the rightmost point denoted by the black dots in the figure into the upper and lower curves, and let us denote the upper curve by
and the lower curve by
so that
is the leftmost point and
is the rightmost point. Thus, Conditions 1, 2 and 3 are satisfied. Note that there is freedom in the choice of the parameter
t. We choose the parameter in the following way. In this particular example, let us assume that
and
are monotone in the
x direction. In
Figure 3, the curve
seems to contain vertical portions (i.e., portions that are parallel to the
y axis), but let us understand that they are not strictly vertical. Then, for any parametrization of
, we can choose the parametrization of
, so that Condition 4 is also satisfied. Thus, the closed curve in
Figure 3 is a target shape specified by
and
that satisfy Conditions 1, 2, 3 and 4.
Let , be a space curve. Let be a real satisfying , and let us define vector by . We consider as the view direction, and call a pitch angle. We say that the target shape specified by and is reflexively fused by if the projections of along onto the plane match and the projections of along onto the plane match . Intuitively, if the target shape is reflexively fused by , and its mirror image with respect to the mirror on the plane create the target shape when it is viewed in the direction .
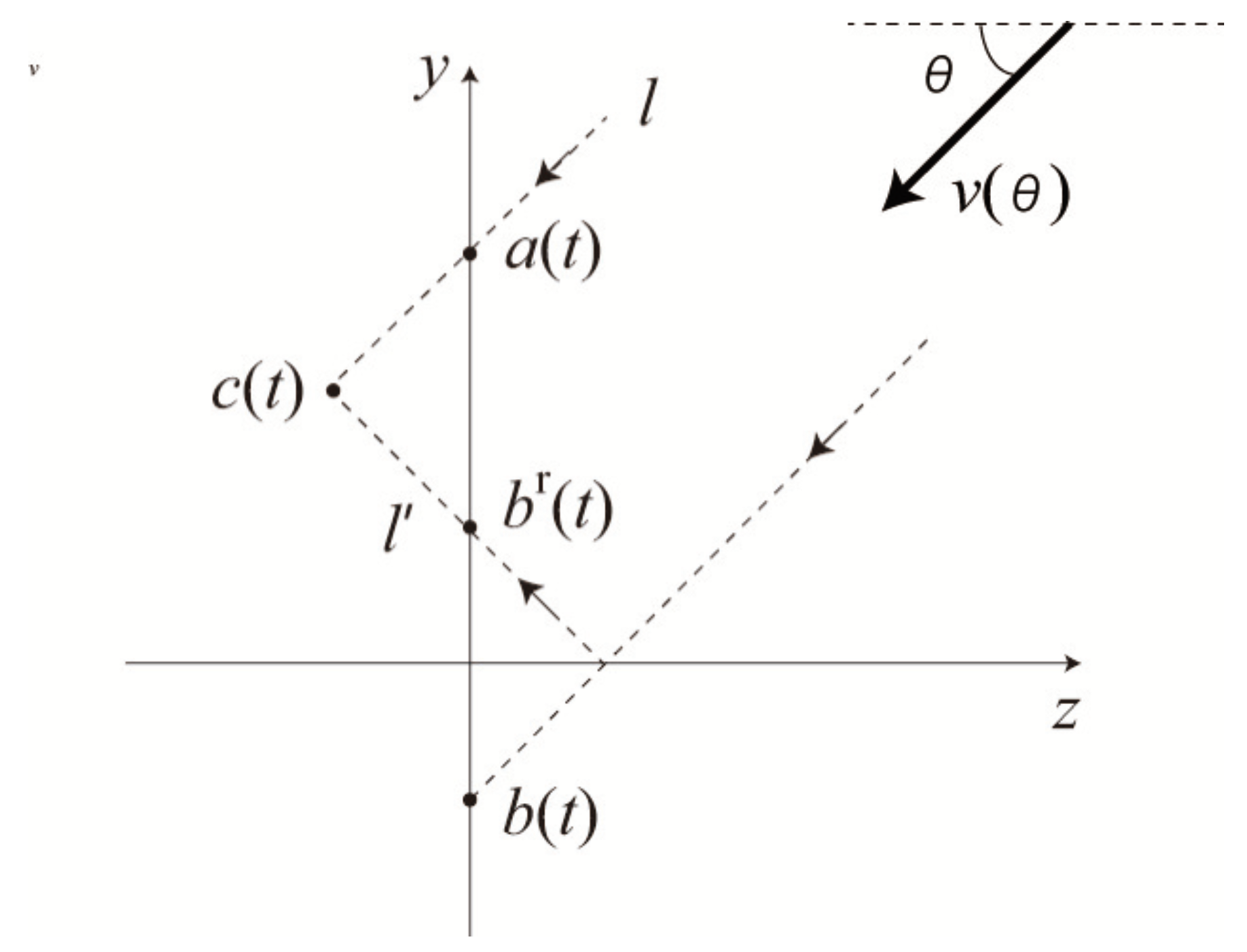
Next, we consider how to compute
from
and
. For each parameter value
t, we consider the plane containing point
and parallel to the
plane, which is shown in
Figure 4. In this plane,
and
are on the
y axis. Because
should coincide with
when it is seen in the view direction
, the point
should be on the line passing through
and parallel to
. Because the mirror image of
should coincide with
when it is seen in the direction
, the point
should be on the line passing through
and parallel to
.
Line
l passing through
parallel to the view direction
is represented by:
and line
passing through
parallel to
is given as:
Hence, point
is obtained as the intersection of
l and
by:
Point coincides with point in the direct view and point in the mirror image. This is valid for any , and thus, we get the space curve .
Finally, we move the curve in the direction parallel to the z axis by a certain distance and adopt the swept surface. This is our method to construct the cylindrical object whose direct appearance together with the mirror image gives the target shape specified by and . We call the resulting object the reflexively-fused cylinder realizing the target shape specified by and .
4. Conditions for Realizability
For each parameter value
,
and
have the same
x coordinate, and hence, we can compute point
by Equation (
1). However, point
and its mirror image are not necessarily visible from the viewpoint. The point might be hidden by the swept surface because other points on the space curve might have the same
x coordinate and the associated swept surface might hide the point. Thus, we next consider the condition under which both point
and its mirror image are visible.
Since the curves are not necessarily monotonic, they might have the same
x coordinate for two or more different values of the parameter. Suppose that for
,
and
have the same
x coordinate, say,
. Then, we obtain:
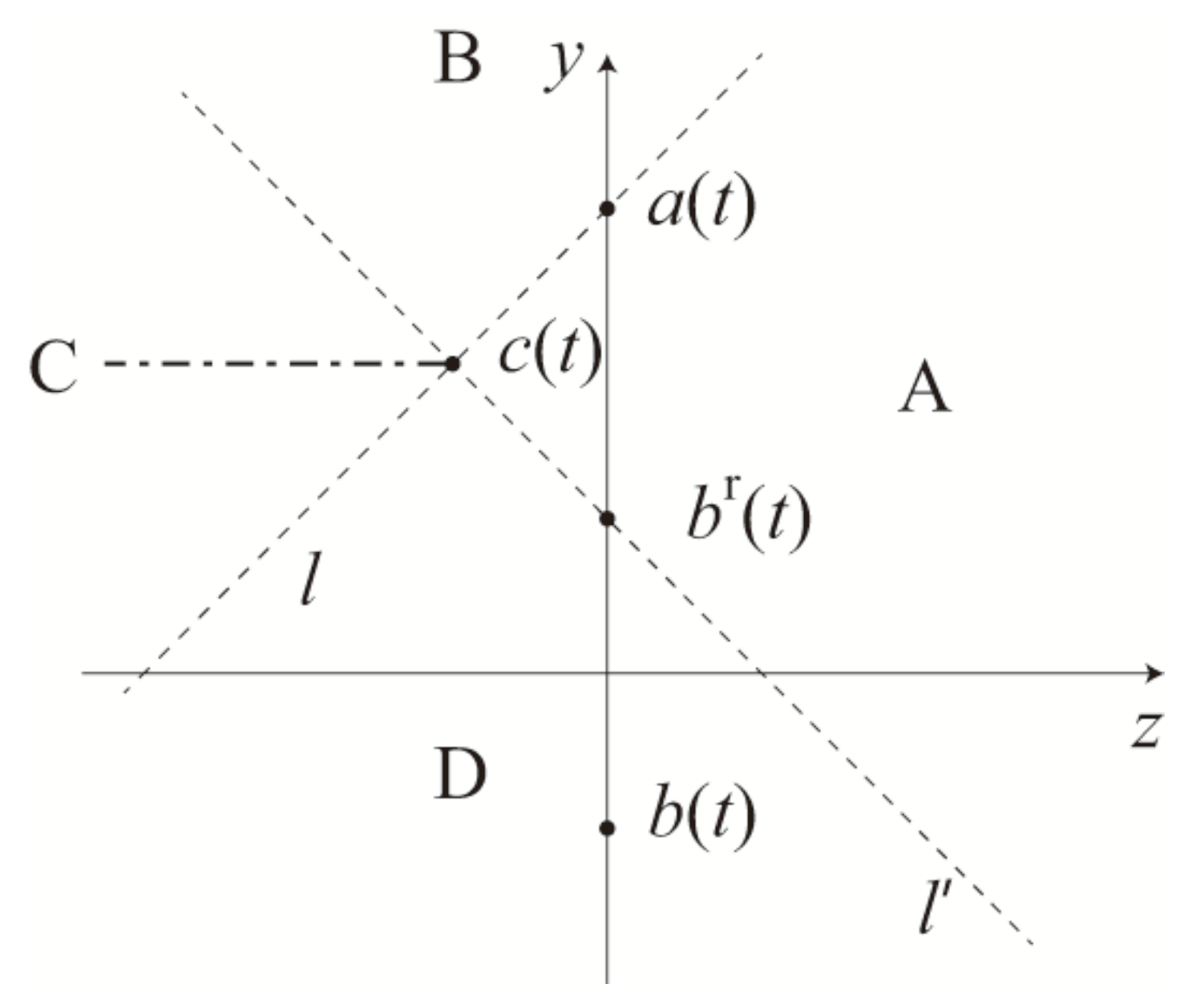
Let us consider the situation on plane
, as shown in
Figure 5.
Note that the swept surface is parallel to the
z axis, and hence, the intersection of the swept surface with plane
is the line parallel to the
z axis, as indicated by the dotted-dashed line in
Figure 5.
As shown in
Figure 5, the plane
is divided into four quadrants by lines
l and
. Let the right, top, left and bottom quadrants be denoted by
and
D, respectively. If point
is in quadrant
A, then point
, or its mirror image, is hidden by the swept surface associated with
. If point
is in quadrant
C, then point
, or its mirror image, is hidden by the swept surface associated with
. If point
is either in quadrant
B or quadrant
D, then points
and
and their mirror images are all visible. Point
is above the line given by Equation (
1) if and only if:
which implies that:
Similarly, point
is above the line given by Equation (
2) if and only if:
From Equations (
4) and (
5), point
is in quadrant
B if and only if:
Similarly, point
is in quadrant
D if and only if:
Therefore, curves and should satisfy the following condition for the visibility of the entire space curve .
Condition 5. For any two parameter values,
t and
, such that
and
have the same
x coordinate, either Equation (
6) or Equation (
7) holds.
The object corresponding to the upper part of the target shape should be lying on or above the mirror, i.e., for all . Hence, we have the following condition.
Condition 6. For any
:
holds.
In summary, the reflexively-fused cylinder realizing the target shape specified by plane curves and can be constructed if Conditions 1 through 6 are satisfied.
5. Examples
We next present examples of reflexively-fused cylinders.
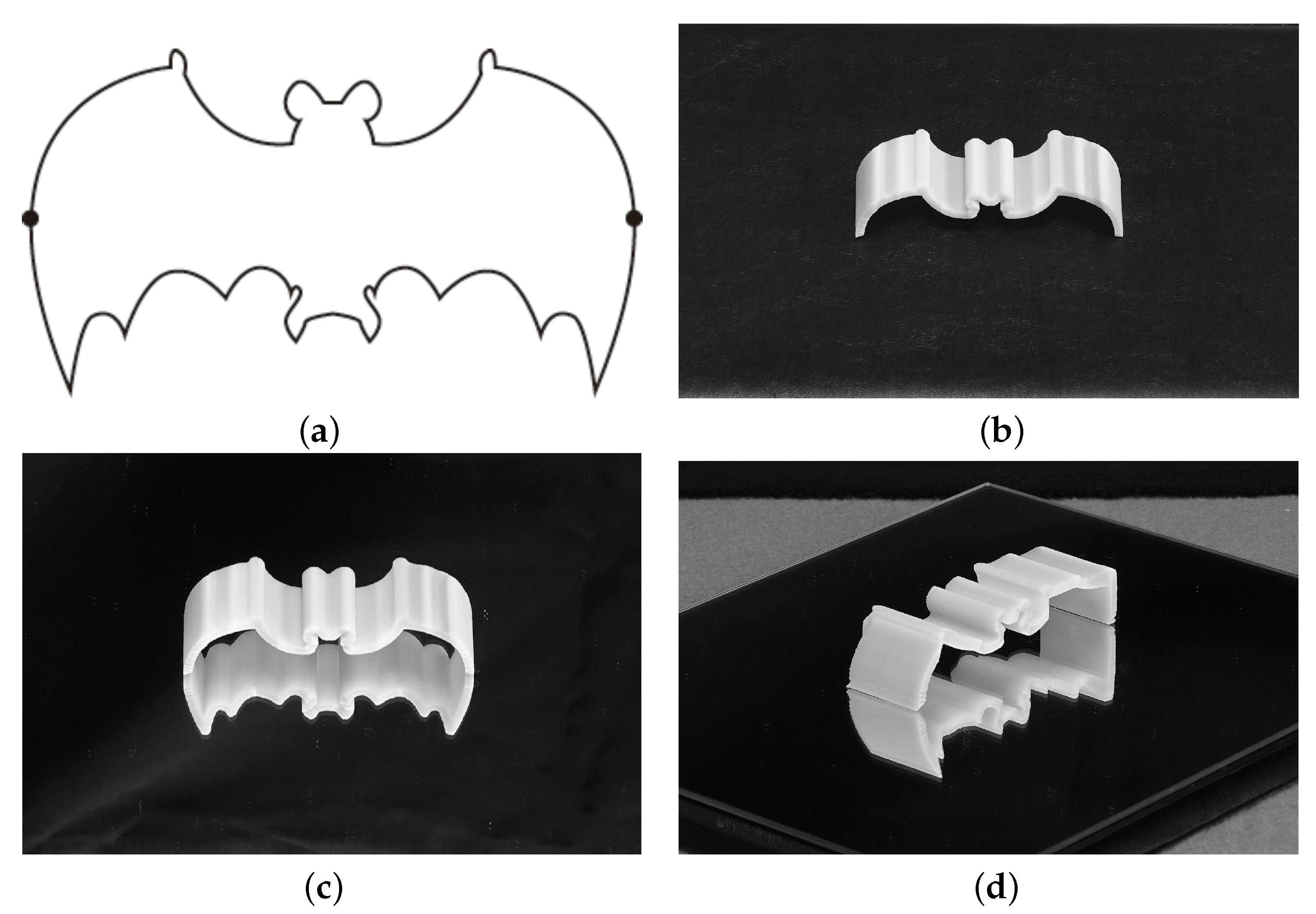
Figure 6 shows a reflexively-fused cylinder of a bat.
Figure 6a shows a target shape, representing a bat, which is divided at the two dots to the upper curve
and the lower curve
.
Figure 6b is the resulting cylinder on a mat surface, and
Figure 6c is the same object on the mirror. Finally,
Figure 6d is the same object as observed from a general viewpoint. As shown in
Figure 6c, the bat is completed by the object and its mirror image. Note that both the upper and lower silhouettes are non-monotonic in the
x direction, but there is a one-to-one correspondence between the two silhouettes.
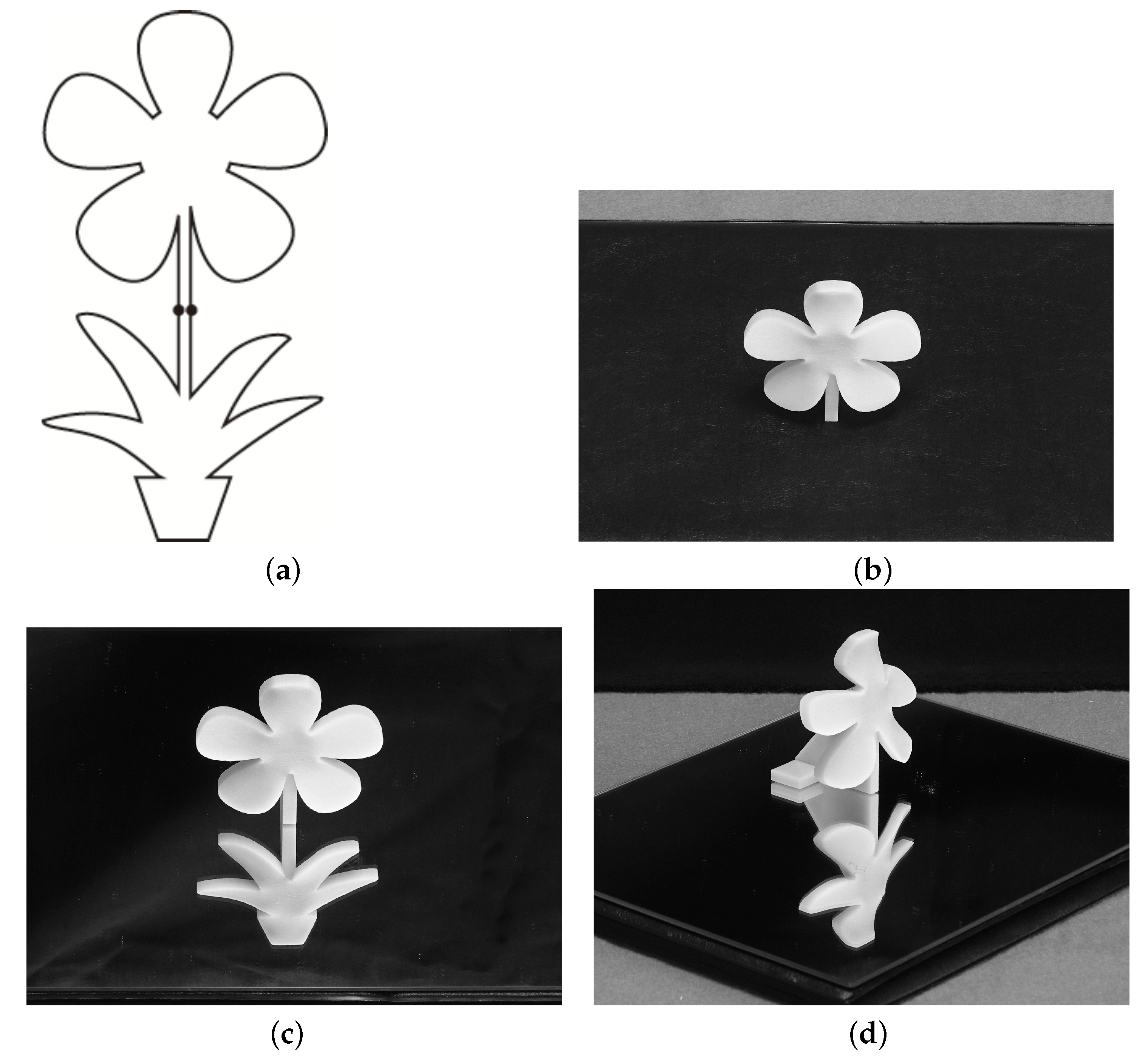
Figure 7 shows a flower in a flower pot, and
Figure 8 shows a man and a woman. In both figures, Panels (a) show a target shape, and Panels (b) show the computed object on a mat plate, while Panels (c) show the same object on a mirror. Finally, Panels (d) show a general view of the object. Both objects are filled, i.e., the inside of the cylindrical surfaces are filled with material, while the objects in
Figure 1 and
Figure 6 are not filled.
In
Figure 7a, the correspondence between the upper and lower curves is as follows. The upper part consists of five petals. The top petal corresponds to the pot; the left upper petal corresponds to the left lower leaf; and the left lower petal corresponds to the left upper leaf. Similarly, the right upper petal corresponds to the right lower leaf, and the right lower petal corresponds to the right upper leaf. Thus, Conditions 1 through 6 are satisfied. In this object, a support structure is added in the hidden area, as shown in
Figure 7d, in order to make it stand stably.
Figure 8 shows a man and a woman. For these objects, we temporarily ignore the gray heads in
Figure 8a and construct reflexively-fused objects for other parts. The resulting objects are augmented by adding the heads in such a way that they are visible in the direct view and hidden by other parts in the mirror image.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







