1. Introduction
Is Newton’s second law obvious? Some introductory physics students respond in the affirmative. The idea that a force applied to a body results in an acceleration in proportion to the (constant) mass of the body seems to them a clear description of the way nature
must work. Here, we argue that the answer ought to be “no”. We do so by developing a model that contains violations of rotation invariance. Though we develop the model from basic Newtonian-physics considerations, we arrive at the Newtonian limit of a quantum-field-theory based test framework known as the Standard-Model Extension (SME) [
1,
2,
3]. The SME has been used extensively in searching for violations of Lorentz symmetry (invariance under boosts as well as rotations) in nature [
4] with the goal of finding evidence of new physics, such as string theory [
5,
6].
The construction of physical theories can be thought of as a logical structure, which begins with primitive notations or undefined terms, defines additional concepts from them, and then makes assumptions about how the concepts (defined and undefined) behave. These assumptions are then tested against experimental and observational data to see if the theory so constructed is a description of a physical effect. It is sometimes hard for students and physicists alike to see theories like Newton’s laws, which have been around a long time, as fitting this form. This difficulty can make studying the subject feel separate from doing modern science. Newton’s laws have also been identified as a particularly challenging example of physical theory [
7]. Presenting students with viable alternatives to standard Newtonian theory can help bring the thought processes involved in doing theoretical physics into the undergraduate classroom.
Old ideas in physics can also be difficult to test because physicists have trouble imagining how to do physics without them. Those new to the field of Lorentz-symmetry testing must work to imagine nature without perfect Lorentz symmetry. Rotation invariance is more visual than boost invariance, and it can be readily explored with Newtonian physics. Hence, one can build intuition for symmetry violation with the Newtonian limit of contemporary models of Lorentz-symmetry violation. Testing Lorentz symmetry is an active area of contemporary physics research, and this work provides an accessible introduction to some of its foundational ideas for undergraduates and those new to the field.
In this work, we develop an alternative version of Newton’s second law by lifting the assumption of isotropy. In
Section 2, we develop the rotation-invariance-violating model from Newtonian considerations, and we address the use of such models in stimulating classroom discussion about the theoretical-physics aspects of Newton’s laws.
Section 3 introduces the idea of the SME and discusses how our alternative version of Newton’s second law fits into it. In
Section 4, we explore an example that provides some intuition for how to do physics with the alternative law as well as for how tests of spacetime symmetries are developed. Finally,
Section 5 demonstrates the connection between spacetime symmetries and conserved quantities using our alternative Newton’s second law as an explicit example.
2. Alternative Newton’s Second Laws
A common statement of Newton’s second law found in introductory physics courses proceeds as follows: the net force applied to a body is proportional to the acceleration of that body. The proportionality factor, typically taken as constant at this stage, is known as the mass m. The easiest way to imagine an alternative to Newton’s second law is to provide a more general form that reduces to the original in some limit. In this section, we consider such examples.
We frame these alternatives in the language above with unaltered force laws such that the simplest limits of our examples may be accessible to students at this level. There are a variety of interpretations of Newton’s second law [
8]. Hence, some readers might prefer to use
as the definition of Newton’s second law, while recasting the examples to follow as proposed alternative forms for the conserved momentum. Others might wish to interpret the effects we consider as changes to the force laws. We address some of these possibilities in the sections to follow.
Consider first a rotation-invariance-violating (RIV) model with a constant mass. Suppose one applies a given force to a body at rest. One could imagine, for example, that our standard force is defined by stretching a given spring a particular distance. Suppose that the body experiences an instantaneous acceleration
a in response to our applied force. Now, suppose that the system is rotated 90 degrees, such that our standard force is applied in a new direction, and in the new configuration a different acceleration,
, results. If such an observation were made, one could imagine modeling it with two Newton’s second laws, one for the east–west direction
and one for the north–south direction
with bodies now having two properties, east–west mass
m and north–south mass
. This is a clear violation of rotation invariance. One is then faced with the question of what happens when the system is rotated, not by 90 degrees, but by some other angle. The natural extension is to write Newton’s second law in the form
where Einstein summation convention has been used. In this model, we take
as symmetric. While one can consider antisymmetric contributions to
here at the level of Newton’s second law, such contributions prevent the definition of a kinetic term and hence such models appear to lie outside of action-based theory. We also assume this matrix is invertible. Under these conditions, one finds that forces exerted along three special directions produce accelerations aligned with the force while forces exerted in other directions produce no such alignment. Note that coordinates can always be found that diagonalize the matrix. In these special coordinates, forces aligned with the coordinate axes will produce accelerations aligned with the force and the full model reduces to the original idea introduced in Equations (
1) and (
2).
Introducing this model to students in mechanics courses produces stimulating discussion that simulates the thinking that happens in theoretical physics. Such discussions can be provoked by asking questions such as, “is this alternative experimentally viable, or has it been ruled out?”, “is it internally consistent?”, or “how could it be distinguished experimentally from the ‘usual’ form?”. Depending on the level of the course, the presentation can be simplified by using matrix form, and/or using diagonalizing coordinates up front.
Though it has not been confirmed by experiment to date, the RIV model is not pure fiction as it has a clear connection to ongoing efforts in contemporary physics as we discuss in the next section. Such connections can be used to bring recent literature into the classroom. Using notation suggestive of the development to follow, the RIV can be rewritten in the form:
Here, an overall factor m equal to 1/3 of the trace of has been pulled out of , and the remaining matrix has been written as the identity (Kronecker delta) plus a traceless matrix . Though we could always choose to write in the form above, this form is particularly convenient when thinking of as a small anisotropic correction to the usual isotropic mass as is typically demanded by existing experimental constraints such as spectroscopy measurements. This form also makes it clear that the model will always be viable for sufficiently small .
The discussion around physical theories and Newton’s second law in mechanics courses can be further enhanced by introducing additional examples, which, rather than rotation invariance violation, introduce other modifications. Consider a proportionality factor between the force and acceleration that is a function of some quantity, say the velocity. Hence experimentally, when the same force is applied to a given body (in the lab frame), different accelerations result depending on the velocity the body has at the instant when the force is applied. Consider the following example:
where
and
c is a constant with units of velocity. Note that in the limit
, this alternative would be experimentally indistinguishable from the ordinary case. Hence, for a sufficiently large value of
c, this model would remain experimentally viable even if no such velocity dependence were present in nature. Some readers may recognize Equation (
5) as a special-relativistic version of Newton’s second law [
9] common in undergraduate treatments [
10]. Introducing this result, or perhaps more appropriately one of its simpler limiting forms such as the case where
and
are aligned,
to students not familiar with special relativity (without saying initially that it’s special relativity) produces another model to which the above discussion questions can be applied. Moreover, it demonstrates convincingly that the original notion of Newton’s second law is not obvious. For the implication involved in calling something obvious, is that it is obviously right. Since Equation (
5) is more correct than the original version, it seems that the original version cannot be obvious. Note that Equation (
5) fits the basic form of Equation (
3), but the
are no longer constant. Note also that, although this match can be made, the directionality in the effective mass in the case of Equation (
5) originates from the velocity of the particle in the lab frame, rather than a fundamental violation of rotation invariance. This distinction can be further clarified using the methods to follow in
Section 4.
3. The Standard-Model Extension
Among the most fundamental goals of contemporary theoretical physics is the unification of the gravitational interaction with the other three interactions in nature into a single quantum-consistent theory. Several decades ago, the realization that some such unification efforts could generate violations of Lorentz symmetry [
5,
6] triggered an intense renewed interest in tests of this fundamental spacetime symmetry [
4] and the development of a comprehensive test framework for organizing the search [
1,
2]. This framework is the SME. The idea behind the SME is to add all Lorentz-violating terms to the equations of known physics to form a structure similar to a series expansion about our current best theories. The additional terms can then be sought in experiment. Though the SME expansion is quantum field theory based, the idea is analogous to the addition of
to Newton’s second law in Equation (
4). One could imagine a researcher in Newtonian times proposing Equation (
4) as a test framework for deviations for Newtonian physics and seeking
in experiments. Such an effort could in principle have discovered either of the models of
Section 2. This connection is more than an analogy as the RIV model arises as a subset of the Newtonian limit of the SME. In the remainder of this section, we provide some comments on the connections between the RIV model of
Section 2 and the SME, and provide some SME-inspired insights on the RIV model. Some more advanced discussion of the SME is provided in the
Appendix A.
In developing the RIV model, we simply imagined the motion of a particle governed by different masses when moving in different directions as modeled by the matrix
or equivalently
. However, one can visualize objects such as
as providing an anisotropy [
11] to empty spacetime itself, and the existence of such a condensate of tensors in empty spacetime can be triggered by spontaneous symmetry breaking [
12] in analogy with the scalar Higgs field in the Standard Model. The background ovals in
Figure 1 illustrate this background condensate.
Via the SME connection, it is straightforward to read off the current experimental limits [
4] on how anisotropic the mass in the RIV model can be. The current limits on
would permit mass anisotropies (differences in inertia among experiments performed in different directions) at roughly the parts in
level in Newtonian experiments in an Earth-based laboratory with conventional macroscopic matter. The least constrained contribution to this number comes from the electron contribution in matter as limited by ion trapping and atomic spectroscopy experiments [
13,
14]. Proton and neutron contributions are more tightly constrained by a number of tests. Magnetometer experiments [
15,
16], a type of clock comparison [
17,
18,
19,
20], are currently the most sensitive.
5. Noether’s Theorem
Continuous symmetries and conservation laws are intimately connected by Noether’s theorem [
27]. Since the RIV model violates rotation invariance but maintains spacetime translation invariance, it lacks angular momentum conservation while retaining energy and momentum conservation. In this section, we provide a specific and familiar example that highlights these implications of Noether’s theorem.
The system under consideration is a dumbbell composed of a rigid massless rod of length
and two identical point masses
in the RIV model. The system is constrained to the x–y plane with the origin at the midpoint of the system. This set up is a simplified model of the standard “ice-skater-spin” lecture demonstration in which a student spins on a stool holding masses in outstretched arms [
28]. For convenience, we work with the Lagrangian formulation. In the RIV model, the kinetic energy
T of each mass takes the form
For the system in question, the Lagrangian, the Hamiltonian, the kinetic energy, and the total energy are all equal. Hence, the Lagrangian for the two-dimensional system can be written
after implementing the constraints and introducing the plane-polar angle
in the x–y plane as a generalized coordinate.
Angular momentum is the generalized momentum conjugate to
,
. As usual, the Euler–Lagrange equations
imply that
is conserved only if the Lagrangian is independent of
. Calculation demonstrates that indeed angular momentum is not constant
assuming a nonzero angular speed and at least one nonzero component of
in the plane of rotation. We also see on general grounds that energy is conserved since there is no explicit time dependence in
L.
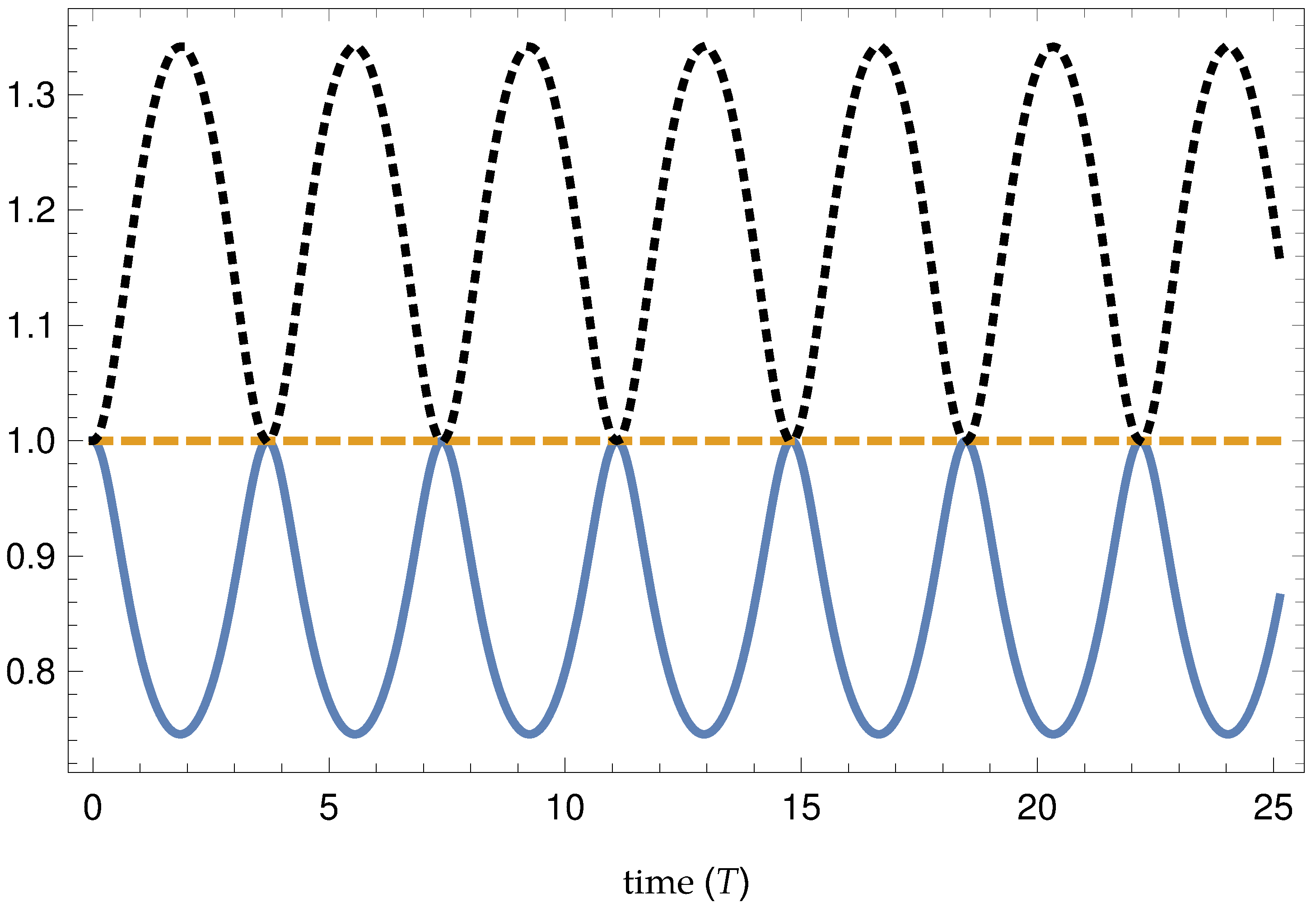
To make these conclusions more concrete, we plot angular speed, angular momentum, and energy as a function of time in
Figure 2 for a specific choice of parameters. The equation of motion is complicated, but lends itself well to numerical solution. For definiteness and simplicity in this example, we consider the case of
with all other components of
being zero. This large but still perturbative value for
provides easily visible results in the plot. Calling the initial angular speed
, we plot the dimensionless angular speed
, the dimensionless energy
, and the dimensionless angular momentum
vs. the dimensionless time
for the initial conditions
,
. In conventional physics, the skaters pull their arms closer to the axis of rotation to increase their angular speed and extend their arms to slow their angular speed. Here, we see the perhaps entertaining result that when rotation invariance is violated in this way, the angular speed of the skater varies periodically without changes in the skater’s body configuration. We also see explicitly that energy is conserved while angular momentum is not. An animation of these results can be found at
https://people.carleton.edu/~jtasson/animations.html.

{kind=link}
{kind=link}

