1. Introduction and Problem Formulation
The purpose of this note is to present several conditions ensuring that a functional differential equation possessing a certain symmetry-invariance property has a symmetric solution. The motivation comes partly from previous studies on antiperiodic and more general classes of solutions (e.g., [
1,
2,
3,
4] and references therein). On the other hand, it is interesting to obtain meaningful solvability conditions in cases where the techniques specific for ordinary differential equations either cannot be easily applied or are not relevant at all. Equations with functional perturbations are interesting from many points of view (see, e.g., [
5,
6,
7,
8,
9] and references therein).
The class of equations we deal with includes, in particular, equations with variable argument deviations and integro-differential equations. More precisely, we consider the general functional differential equation
where
J is the closure of an unbounded interval and
is a mapping (generally speaking, non-linear). We choose
to be either
or
with a specific
(see (
13) in the next section); the reasoning to follow is common for both versions.
In the sequel, the following notation is used: is the Fréchet space of piece-wise continuous functions with possible jump discontinuities at points of a given countable set endowed with the system of seminorms , , ; is the Fréchet space of continuous functions on J with the sequence of seminorms , , ; is the Fréchet space of functions that are Lebesgue integrable over every bounded interval contained in J, with the seminorms , , ; is the Fréchet space of locally essentially bounded functions with the seminorms , , ; and are, respectively, the Banach spaces of continuous and integrable functions on a bounded interval endowed with the standard norms.
A solution of (
1) is an absolutely continuous function satisfying equality (
1) almost everywhere. In what follows, we consider the case where the restriction
(or directly
f if
) is continuous as a mapping from
to
with some
strictly containing
J (singularities on the boundary are excluded).
We study the problem of the existence of solutions
of Equation (
1) possessing the symmetry property
where
is a given constant and
is a monotone increasing, absolutely continuous function. Due to the nature of property (
2), we impose throughout the paper the following symmetry condition on the operator
f:
for any function
possessing property (
2). We also assume that
J is invariant with respect to the action of
, i.e.,
Typically, J is either or one of the intervals , .
In (
1), (
3), and all similar relations below, we assume that the corresponding relations between integrable functions are satisfied almost everywhere and do not always indicate this fact explicitly.
Condition (
2) describes a class of properties of solutions such as evenness, oddness, periodicity, and antiperiodicity. For example,
may have the form
,
, where
T is fixed and
; then condition (
2) defines a Floquet-type solution with
(for many-dimensional systems, solutions with this and more general properties are investigated in [
1,
2,
3,
4]), while for
, (
2) describes the solutions studied in [
2,
10]. For more complicated functions
, the “symmetric” character of property (
2) is less obvious compared to, e.g., periodicity or antiperiodicity. For example, with
and
, property (
2) holds for the function
,
.
Note that condition (
3) naturally arises in the context of the study of solutions with property (
2). For example, if (
1) is an ordinary differential equation of the form
then assumption (
3) is satisfied when the function
is such that
for a. e.
and all
. Relation (
6) is a particular case of the property considered in [
3] (see also the references therein for more details) for weakly non-linear systems of ordinary differential equations; it ensures the invariance of Equation (
5) under the transformation
,
. The proof of the existence of symmetric solutions in [
3] involves a small parameter argument.
In this note, we focus on a general functional differential Equation (
1) and formulate several conditions guaranteeing the existence of solutions with property (
1). The method is different from that employed in [
3]; here, we use results from the theory of boundary value problems. Note also that (
1) may involve various kinds of argument deviations, in contrast to the most frequently studied delay equations (see, e.g., [
11]).
2. Extension by Symmetry
It is convenient to work with the restriction of (
1) to suitable bounded intervals. Although such restrictions are, generally speaking, impossible for general equations (
1) without specifying additional initial data, it turns out that, in our case, this can be done in a straightforward way due to the symmetry assumption (
3). Let us fix some value
with
. For definiteness, assume that
. It is clear from the problem formulation that the restriction
of every solution
u of (
1), (
2) to the interval
satisfies the two-point boundary condition
Moreover, a converse statement, in a sense, is true under condition (
3). To formulate it in a rigorous way, we introduce some notation and make the equation setting more specific.
The conditions assumed on the function
imply that the inverse function
is well defined and the sequence of numbers
is strictly increasing. At this point, it is natural to make more precise the choice of the interval
J on which Equation (
1) is studied under the symmetry condition (
3). Namely, we assume that
is chosen so that
with
and take
where “〈” means, respectively, “[” or “(”, depending on whether the corresponding value at the bracket is finite or not. For example, if
and
, then (
10) gives
.
Thus, we consider Equation (
1) on the unbounded interval
J of form (
10). Due to the properties mentioned above,
J can be represented as the union of the half-open intervals
if
and
if
. It is obvious that in both cases, these intervals are mutually disjoint, which justifies the following notation: for every
, put
to be equal to
j, where
j is such that
.
In case the domain
for
f in the problem formulation is chosen to be
, from now on, we put
in the definition of
appearing in the problem formulation.
Lemma 1. If a continuous function satisfies the two-point boundary condition (
7)
, then the functionhas property (
2)
. Proof. Let
be defined by (
14). Since
is increasing, it is clear from (
11) that
for any
k, and hence, for
, (
14) yields
Arguing by induction, we easily obtain that
satisfies the equality
for every integer
k. It follows immediately from (
16) that
for all
k. Since
, this means that
satisfies (
2) on
J. □
For any
, let
stand for the corresponding function (
14). Let
be the subspace of
constituted by the functions satisfying condition (
7) (here and below,
denotes the closure of
,
). The following statement is an immediate consequence of formula (
14).
Lemma 2. Let . Then is continuous if and only if . For , the function has countably many discontinuities of the first kind at points of set (
13)
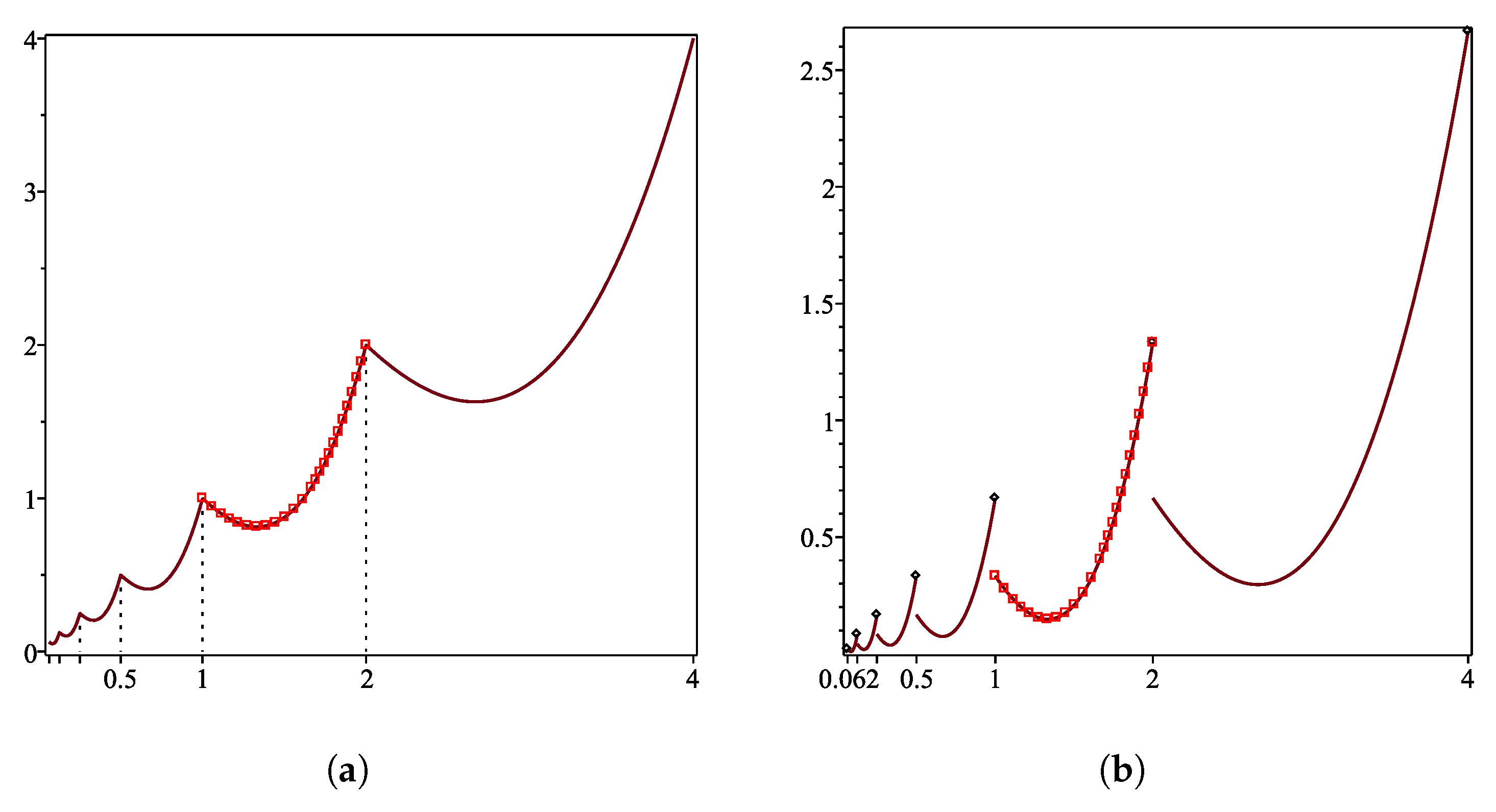
. Lemma 1 is a natural generalization of the corresponding well-known statements for ordinary differential equations (in particular, on the extension of a periodic solution of an equation with the right-hand-side periodic in time). The function
extends
to
J by symmetry and, by Lemma 2,
is always continuous if
v satisfies condition (
7). For example, if
,
,
, and
,
is continuous for
,
(
Figure 1a) and has a jump at each of the points
for
,
(
Figure 1b).
3. Equation on a Bounded Interval
Define the operator
by putting
for any
. Note that since
f is well defined on
, the expression in the right-hand side of (
17) makes sense not only for
, for which
is continuous, but for any
.
Lemma 3. If a function is a solution of the equationsatisfying condition (
7)
, then the function is a solution of (
1)
possessing property (
2)
. Proof. Let
v satisfy (
7) and (
18). By Lemma 1, the function
is the extension of
v to
J with the preservation of symmetry, i.e.,
Let
. Then formula (
14) yields
, and therefore,
By (
15),
for
t from
, and it follows from (
18) that
whence, by (
20),
Since
has property (
19), using assumption (
3) we obtain from (
22) that
for
.
Now let
. Then, by (
14), we have
and
The denominator in (
24) is non-zero almost everywhere because
is increasing. Using (
15), (
18), we find that
and
, whence, by (
24),
On the other hand, in view of assumption (
3), we have
Combining (
25) with (
26), we conclude that (
23) holds for
. In a similar manner, by induction with respect to negative and positive values of
k, we show that equality (
23) is true for
for any
k, i.e.,
is a solution of (
1). □
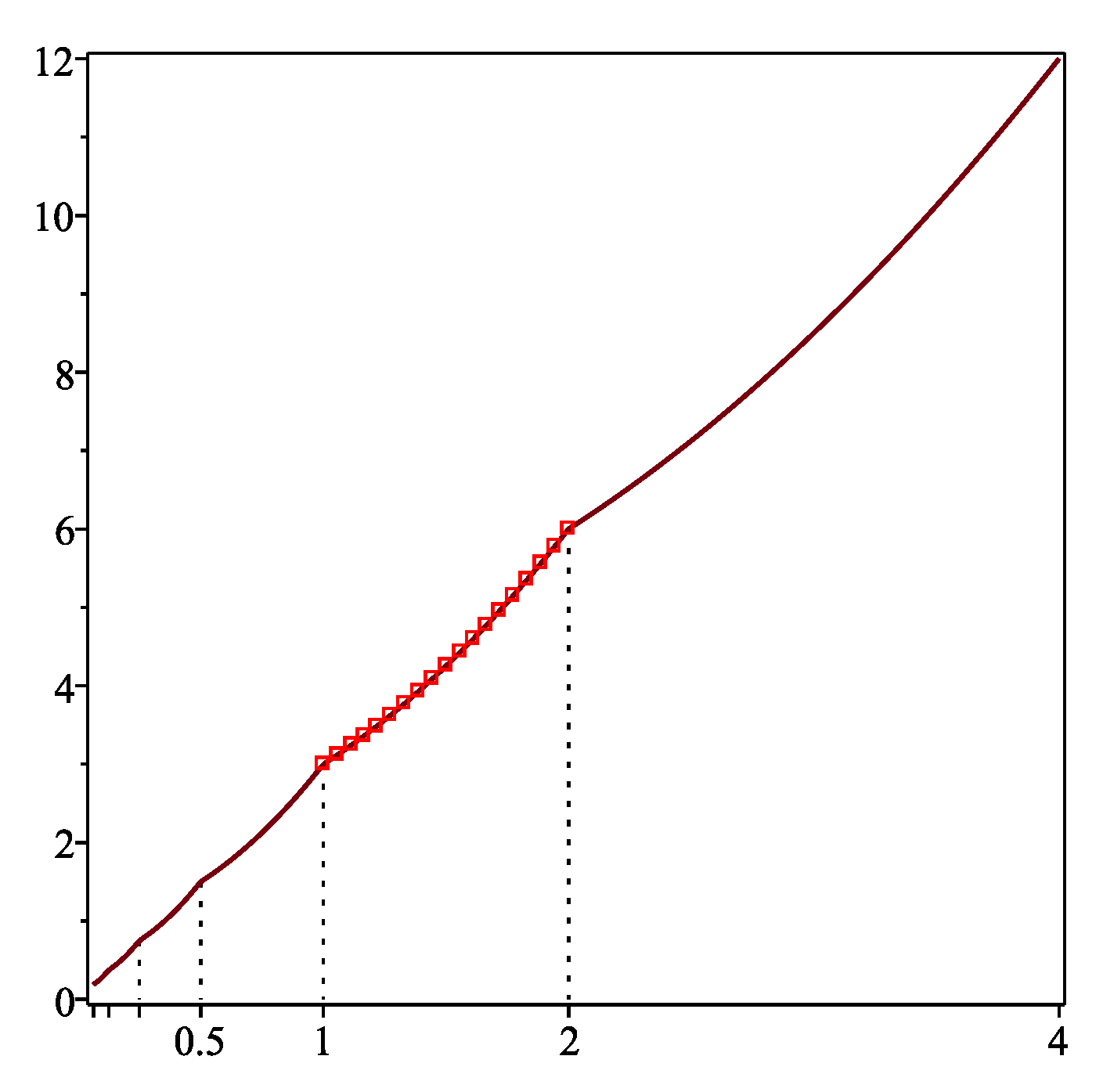
It is worth pointing out that the formulation of Equation (
18) on the bounded interval
is correct and no initial functions are needed: all the operations with values of
u that may appear in the right-hand side of (
18) are well defined since the function is extended by symmetry. For example, if
,
,
, the operator
f appearing in (
1) has the form
with a certain
, and one needs to compute the values
on the function
,
, then we substitute into (
27) the corresponding function
the graph of which is presented on
Figure 2. We see, in particular, that
is continuous because
v satisfies (
7). An easy computation shows that in this case,
Lemma 4. If is continuous as a mapping from to , is continuous as a mapping from to .
Proof. Let
with
of form (
13). Let
and
,
, in
. Construct the functions
and
,
, according to (
14). If
, then by (
15),
and (
14) yields
for all
and
. Similarly, for
, we have
, and by (
14),
for all
,
. Continuing by analogy, we find that
for all
and
. Therefore,
as
for every
, i.e.,
in
. The continuity of
and definition (
17) imply that
,
in
. Since
is an open neighborhood of the interval
J, it follows that
has no non-integrable singularities on
, and hence
.
If
and
are as above, then
can be estimated using (
29), and the same argument can be applied. □
Lemmata 1 and 3 allow us to replace the problem of finding a solution
of (
1) with property (
2) by the two-point problem (
7) and (
18) on the bounded interval
. Lemma 4 ensures that we are under standard assumptions concerning boundary value problems for first-order functional differential equations.
The above-mentioned facts are true in particular for the operators involving inner superpositions, which may have the form
where
is a Carathéodory function and
,
, are measurable. In this case, (
1) is an equation with argument deviations, and the procedure of restriction of Equation (
1) to the bounded interval
, in fact, corresponds to the well-known techniques from [
5]. The symmetry condition (
3) for operator (
30) can be verified, e.g., using the following simple lemma.
Lemma 5. Let there exist integers , , ⋯, such thatandfor all real , ⋯, and almost every . Then the operator given by (
30)
satisfies condition (
3)
. Proof. The proof is based on assumption (
31). Indeed, let
be such that (
2) holds. Then
,
, and (
31) yields
By virtue of (
32),
which in view of the arbitrariness of
u with property (
2), proves (
3). □
Lemma 5 allows us to check condition (
3) for a class of equations with argument deviations and carry out the transition from (
1) and (
2) to (
7) and (
18). For example, consider the problem
where
and
are constants,
a,
b are functions integrable on every bounded interval, and such that
a is positive,
for all
, and
with
and
,
.
Define
f by (
30) with
,
Then problem (
33) and (34) is a particular case of (
1) and (
2) with
on
(it is obvious that
and
in (
10) for this case). It is easy to see that functions (
37) satisfy condition (
31), which means here that
where
,
are integers. Furthermore, by (
35) and (36),
for any
t and
,
, i.e.,
h satisfies condition (
32) with the given
and
,
. Consequently, the problem of finding solutions
of (
33) possessing property (34) can be replaced by the corresponding two-point problem (
7) and (
18) on a bounded interval of length
.
4. Existence of a Unique Symmetric Solution
We formulate conditions in terms of the “restriction” operator
given by (
17). Consider the case where the operator
admits the estimate
for all
from
, where
,
, are certain positive linear operators. By a positive operator, we mean an operator
such that
for all
such that
.
Theorem 1. Let there exist positive linear operators , , such that (
38)
holds for all from . Let andwith a certain . In addition, assume thatif orif . Then Equation (
1)
has a unique solution possessing property (
2)
. In (
39)–(
41) and similar relations below,
stands for the value of
on the constant function equal to 1, and
is the norm in
.
Theorem 2. Let there exist positive linear operators , , such that (
38)
holds for all from . Let andwith some . In addition, assume thatif orif . Then Equation (
1)
has a unique solution possessing property (
2)
. Condition (
38) is satisfied, in particular, if (
1) is a linear equation of the form
where
,
, are positive linear operators such that their restrictions to
are continuous mappings from
to
with some
strictly containing
J. In this case, the symmetry condition holds if
is such that
and
for any absolutely continuous function
u possessing property (
2), and Theorems 1 and 2 can be applied (in fact,
and
in this case). Other conditions for the existence of symmetric solutions of (
45) are given by the next two statements.
Theorem 3. Assume (
47)
. If andthen Equation (
45)
has a unique solution possessing property (
2)
. In (
48) and (49) and relations (
50) and (51) below,
,
, are bounded linear operators constructed according to (
17), and
denotes the norm in
.
Theorem 4. Assume (
47)
. If andthen Equation (
45)
has a unique solution possessing property (
2)
. Although all the conditions involve the “tilde” versions of the operators, they are verified, due to the symmetry, essentially in the same way as if the operators were given on
with
. In particular, if (
45) is the equation with two measurable argument deviations
,
, with
,
,
then by Lemma 5, conditions (
47) hold when there exist integers
,
such that
the function
(
) satisfies (
46), and the functions
,
are such that
Let us choose
and
c so that
and
,
(e.g., if
, where
, then
with any
). By virtue of Theorems 3 and 4, if
,
and assumptions (
46), (
53) and (
54) hold, then Equation (
52) has a unique solution with property (
2) provided that the integrals of
,
over
lie within the bounds
if
and
if
. For example, when
(
), conditions (
54) are satisfied if
,
, and
,
,
,
.
5. Proofs
We need auxiliary propositions based on the results of [
8,
12,
13]. Consider the two-point boundary value problem
where
is defined according to (
17) and
is as in (
11) and (
12).
A solution of Equation (
55) is defined as an absolutely continuous function satisfying (
55) almost everywhere on
.
Fix the value of
, and let the set
be defined as follows:
if and only if
is a bounded linear operator such that the equation
has a unique solution
v in
for any
, and
whenever
.
Proposition 1 ([
12])
. Let there exist positive linear operators , , such that (
38)
holds for all from . If, in addition, the inclusionshold with some constant , then problem (
55)
and (56)
is uniquely solvable. Proposition 2 ([
13])
. Assume that is a linear operator of the formwhere , , are positive linear operators such thatThen problem (
57)
and (58)
is uniquely solvable for any . We also need the following statements that are obtained from results of the work [
8].
Proposition 3. Let , , be positive linear operators. Let and (
39)
holds with some . In addition, assume (
40)
if or (
41)
in the case where . Then inclusions (
59)
hold. Proposition 4. Let , , be positive linear operators. Let and (
42)
holds with some . In addition, assume (
43)
if or (
44)
if . Then inclusions (
59)
hold. Propositions 3 and 4 are consequences of Theorems 2.4 and 2.8 from [
8], which provide conditions guaranteeing the positivity of the corresponding Green’s operator for the two-point problem
with
, positive
,
, and
. In our case, the set
corresponds to
from [
8].
Let
. Then, according to [
8] (Theorem 2.4),
provided that
and
. The first operator in (
59) is positive if
, and the above formulae with zero
yield
and
which means that
. Since the norm in
is additive on non-negative functions, we get (
43). For
, representing the first mapping from (
59) in the form
we apply the formulae mentioned with
,
, and get (
44). Finally, condition (
42) follows from the above inequalities with
,
and ensures the second inclusion in (
59). Proposition 4 is obtained from [
8] (Theorem 2.8) in a similar way.
In order to prove Theorem 1, we note that the assumptions made on
f (and the continuity of
and
from condition (
38) guarantee that
is continuous. It is sufficient to establish the solvability of the two-point problem (
55) and (56). Let
. By Proposition 1 and (
55) and (56) is solvable if one can specify some
,
, such that
and
from (
38) satisfy conditions (
59). According to Proposition 3, their fulfillment is a consequence of assumptions (
40) and (
42). The case
is treated similarly using Propositions 1 and 4.
Theorems 3 and 4 are obtained from the following statement.
Proposition 5. Let , , be positive linear operators. Assume that either and (
48)
and (49)
hold or and (
50)
and (51)
hold. Then inclusions (
61)
are true. Proposition 5 is proved by applying the above-mentioned Theorems 2.4 and 2.8 of [
8] to the operator
on
. Note that under our assumptions,
and
constructed according to (
17) are bounded linear operators acting from
to
. When the validity of (
61) is established, the assertions of Theorems 3 and 4 follow from Proposition 2.



{kind=link}
{kind=link}

