Reliability-Aware Cooperative Routing with Adaptive Amplification for Underwater Acoustic Wireless Sensor Networks



Abstract
:1. Introduction
- A reliability-aware routing (RAR) protocol is proposed for UAWSNs that considers the connectivity of the complete paths towards water surface rather than finding the conventional one- or two-hops neighbors. In addition, the probability of successfully transmitting a packet is computed for every chosen path. A path that is connected with water surface with the highest probability of successfully transmitting a packet is chosen as the path for data routing. These strategies overcome packets loss and enhance the probability of transferring packets to end destination with low delay as backed by simulation results.
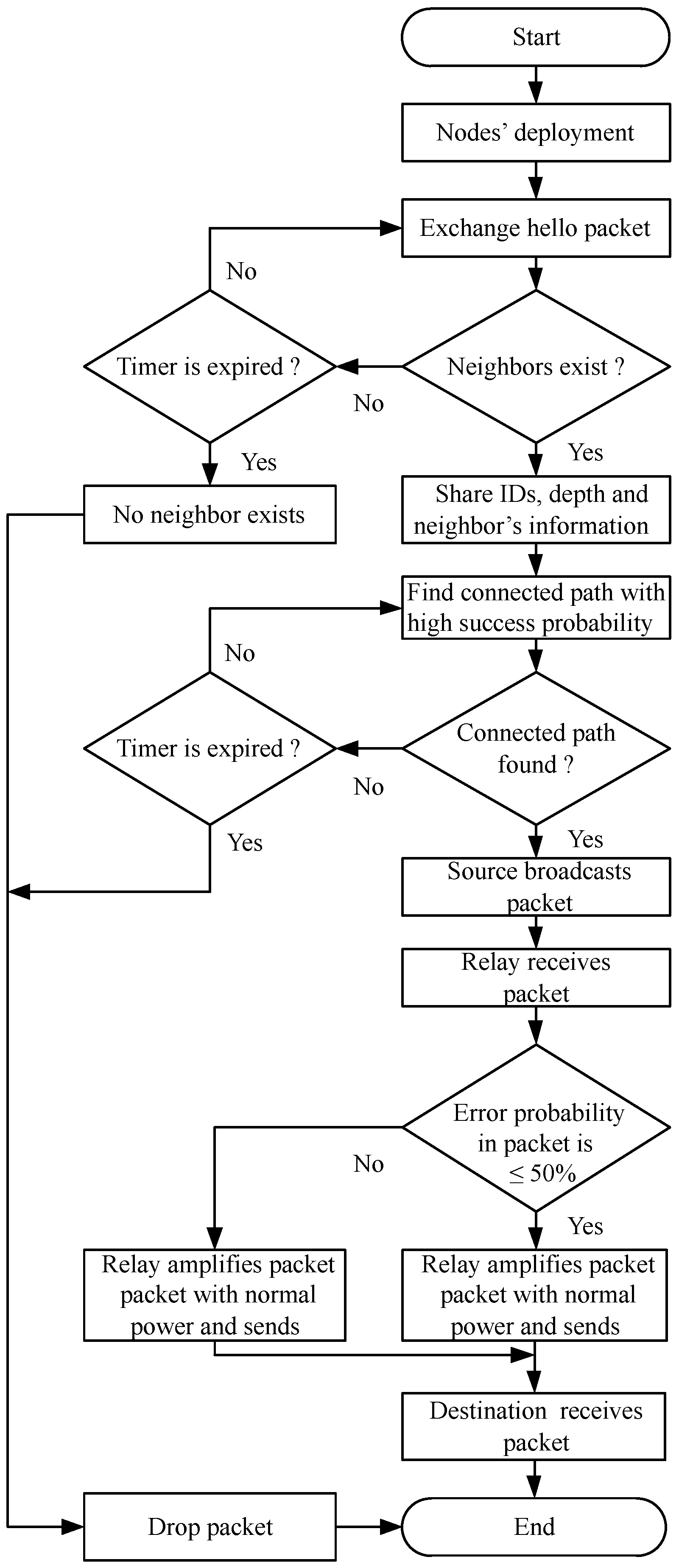
- The underwater is a harsh medium with uncertainty. The condition of a routing link may change just before its computation and prior to information transmission, which may corrupt data packets. To counteract the effect of data corruption, cooperative routing with adaptive power control is combined with the RAR scheme that makes the RACAA scheme. In RACAA, a relay node is able to enhance its power level beyond the normal value if it finds that data packets have more than error. With increased power level, data packets are less prone to corruption by sea channel, as backed by simulation results. This strategy is different from the existing cooperative routing schemes where relay advances packets with fixed power and irrespective of channel conditions.
- Both RAR and RACAA schemes make use of physical distance calculation using hello packets. This eliminates the need for knowing geographical positions of nodes within the sea as required in the conventional approach, which is challenging and cumbersome as nodes move with ocean tides.
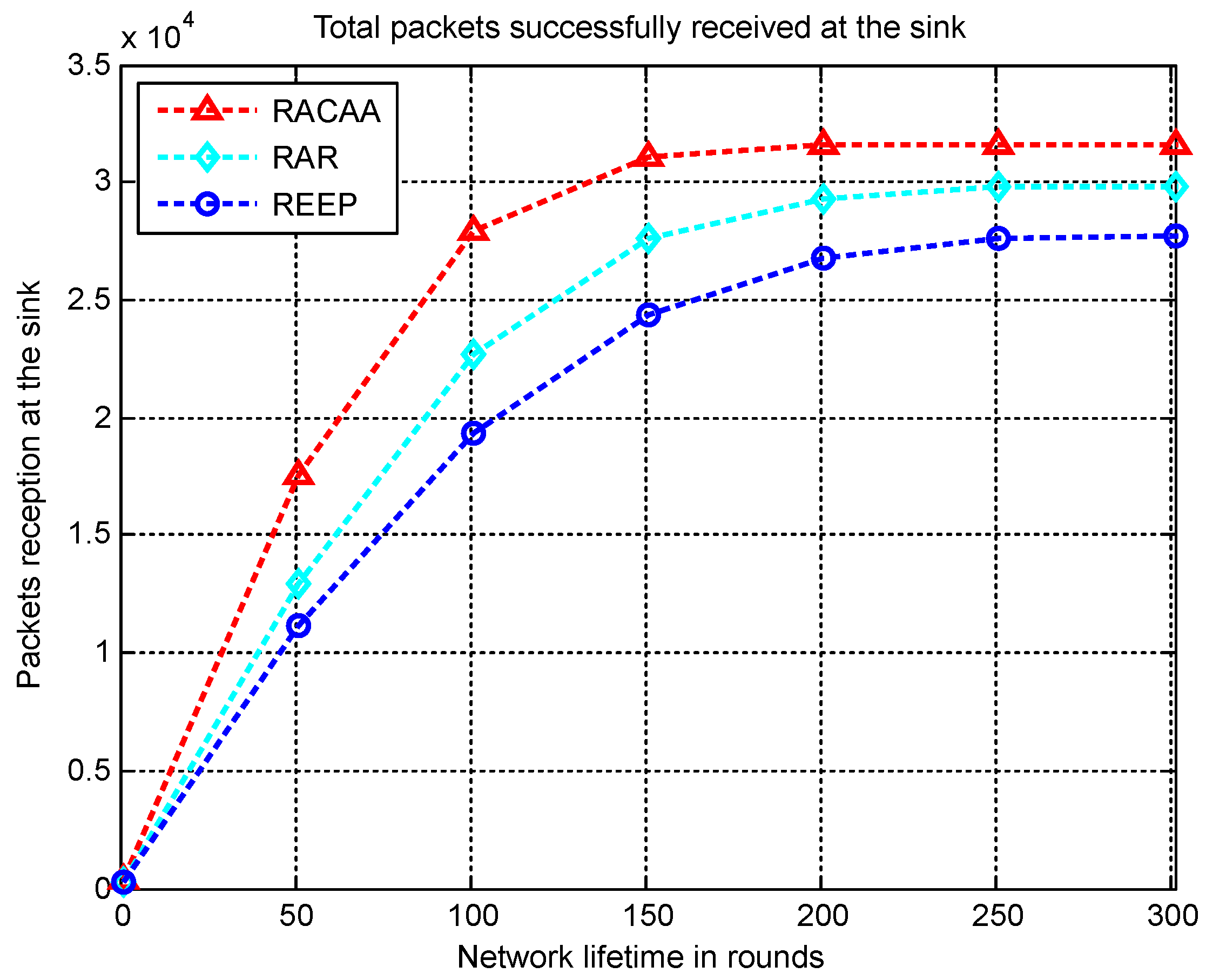
- Based on performance evaluation, the RAR protocol can be used for applications involving reliability with time efficiency. That is, the RAR protocol is capable of high packets delivery in a short span of time. This makes it a first choice of underwater applications that require high throughput with minimal latency. Such applications include, for instance, naval warfare, under sea disaster prediction and prevention. On the other hand, the RACAA protocol can be used in applications involving reliability with delay tolerance, which means applications requiring high data throughput without taking into account the high delay associated with RACAA. Such applications include, for instance, sea bed exploration for mine reservoirs, water quality and pollution monitoring.
2. Related Work
3. RAR: Reliability-Aware Routing
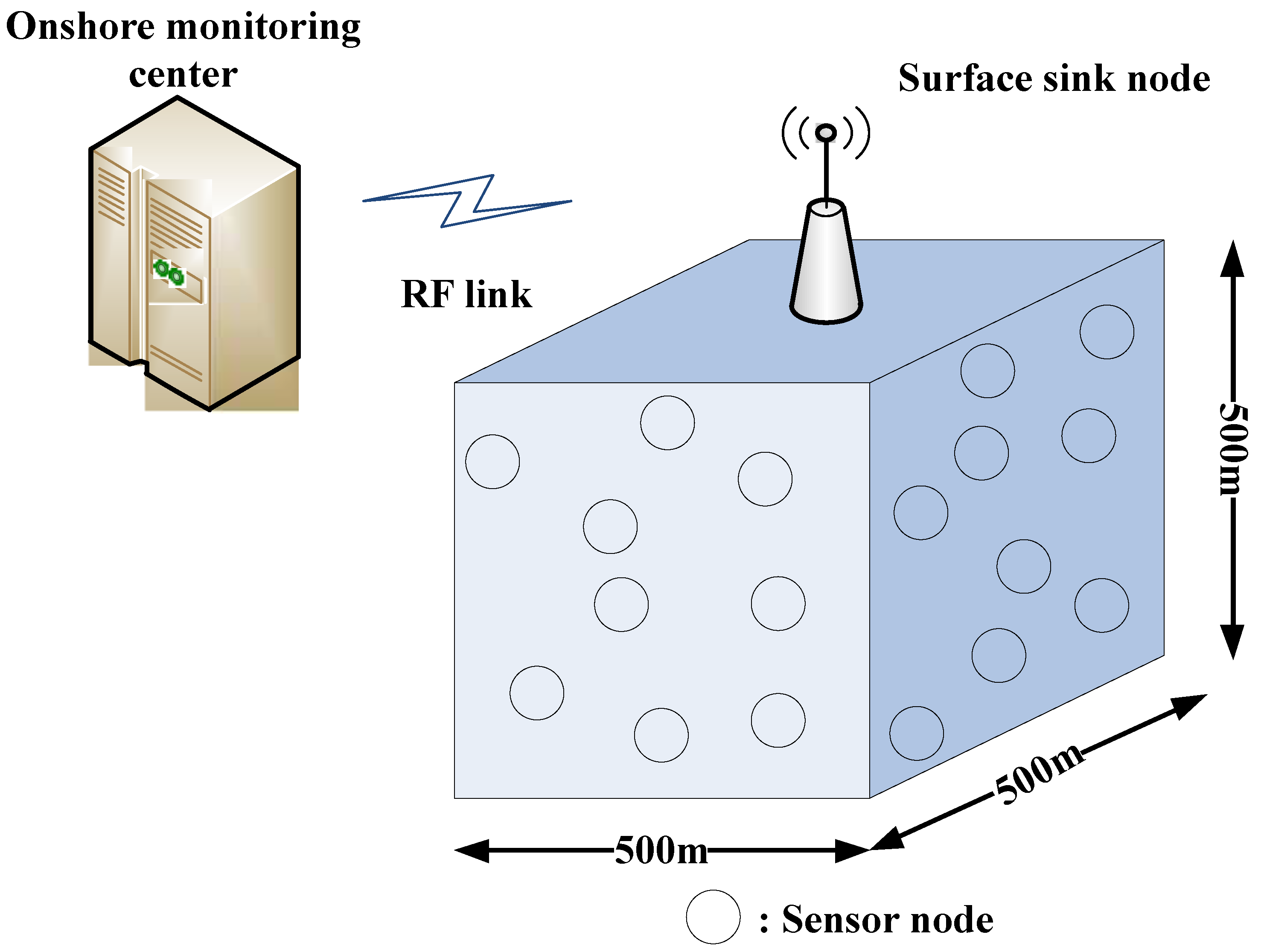
3.1. Network Structure and Nodes’ Deployment
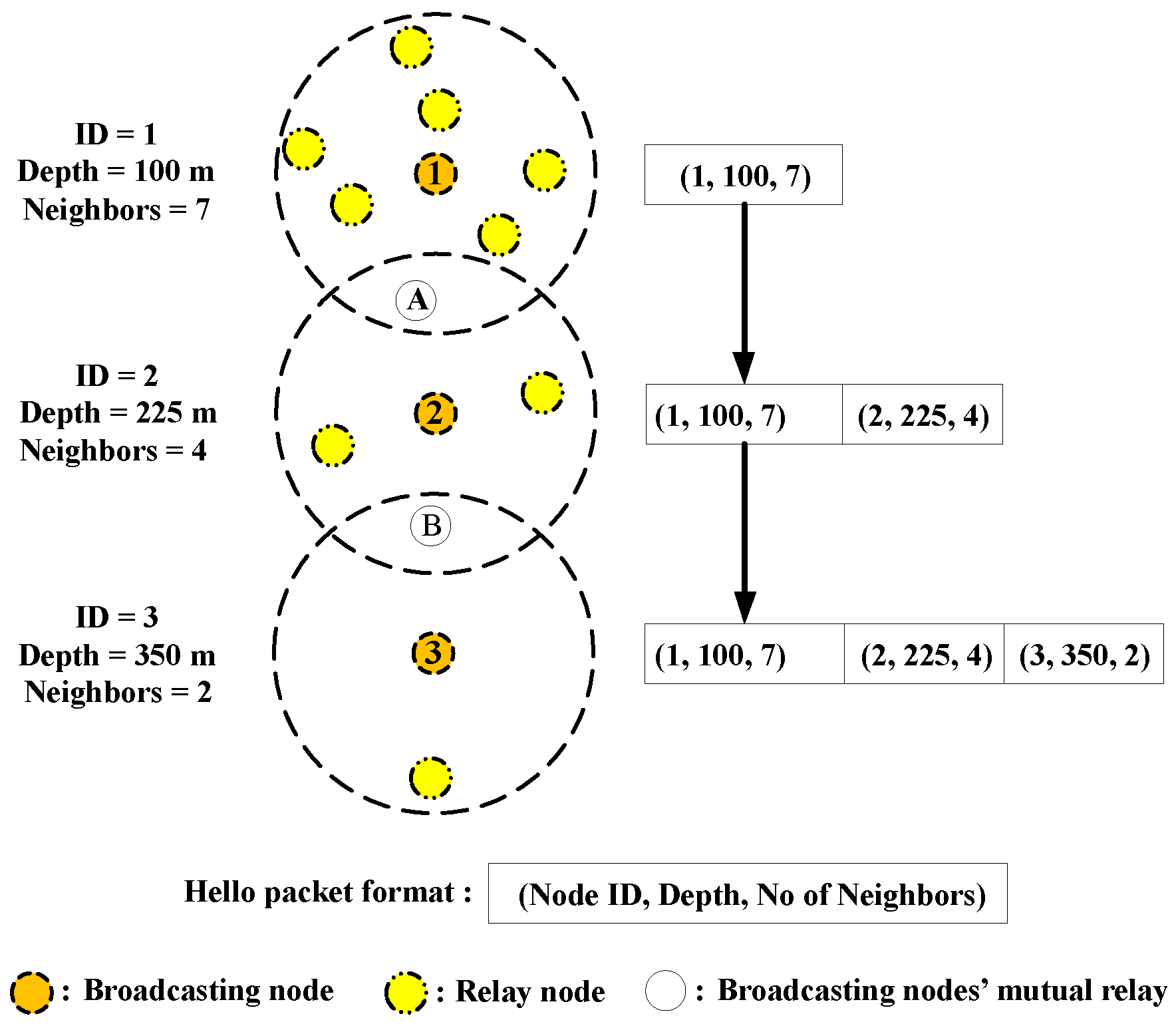
3.2. Determination of Neighbors and Their Information
3.3. Calculation of Physical Distance
3.4. Data Routing
4. RACAA: Reliability-Aware Cooperative Routing with Adaptive Amplification
Cooperative Routing with Adaptive Amplification
5. Performance Evaluation
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Khasawneh, A.; Latiff, M.S.; Kaiwartya, O.; Chizari, H. A reliable energy-efficient pressure-based routing protocol for underwater wireless sensor network. Wirel. Netw. 2018, 24, 2061–2075. [Google Scholar] [CrossRef]
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: Applications, advances and challenges. Philos. Trans. R. Soc. 2011, 370, 158–175. [Google Scholar] [CrossRef]
- Khan, A.; Ali, I.; Ghani, A.; Khan, N.; Alsaqer, M.; Rahman, A.; Mahmood, H. Routing protocols for underwater wireless sensor networks: Taxonomy, research challenges, routing strategies and future directions. Sensors 2018, 18, 1619. [Google Scholar] [CrossRef] [PubMed]
- Rahman, Z.; Hashim, F.; Othman, M.; Rasid, M.F. Reliable and energy efficient routing protocol (REEP) for underwater wireless sensor networks (UWSNs). In Proceedings of the IEEE 12th Malaysia International Conference on Communications, Kuching, Malaysia, 23–25 November 2015. [Google Scholar]
- Majid, A.; Azam, I.; Khan, T.; Sangeen; Khan, Z.A.; Qasim, U.; Javaid, N. A reliable and interference-aware routing protocol for underwater wireless sensor networks. In Proceedings of the IEEE 10th International Conference on Complex, Intelligent and Software Intensive Systems, Fukuoka, Japan, 6–8 July 2016. [Google Scholar]
- Shah, S.; Khan, A.; Ali, I.; Ko, K.M.; Mahmood, H. Loclization free energy efficient and cooperative routing protocols for underwater wireless sensor networks. Symmetry 2018, 10, 498. [Google Scholar] [CrossRef]
- Ullah, U.; Khan, A.; Altowaijri, S.M.; Ali, I.; Rahman, A.U.; Kumar, V.; Ali, M.; Mahmood, H. Cooperative and delay minimization routing schemes for dense underwater wireless sensor networks. Symmetry 2019, 11, 195. [Google Scholar] [CrossRef]
- Yang, G.; Dai, L.; Wei, Z. Challenges, threats, security issues and new trends of underwater wireless sensor networks. Sensors 2018, 18, 3907. [Google Scholar] [CrossRef]
- Li, N.; Martinez, J.F.; Chaus, J.M.M.; Eckert, M. A survey on underwater acoustic sensor networkr routing protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef]
- Hao, K.; Jin, Z.; Shen, H.; Wang, Y. An efficient and reliable geographic routing protocol based on partial network coding for underwater sensor networks. Sensors 2015, 15, 12720–12735. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.; Ahmedy, I.; Anisi, M.; Javaid, N.; Ali, I.; Khan, N.; Alsaqer, M.; Mahmood, H. A localization-free interference and energy holes minimization routing for underwater wireless sensor networks. Sensors 2018, 18, 165. [Google Scholar] [CrossRef]
- Day, K.; Touzene, A.; Arafeh, B.; Alzeidi, N. GARP: A Highly reliable grid-based adaptive routing protocol for underwater wireless sensor networks. Int. J. Comput. Commun. Netw. 2017, 9, 71–82. [Google Scholar] [CrossRef]
- Li, Y.; Jin, Z.; Su, Y.; Yang, M.; Xiao, S. An environment-friendly multipath routing protocol for underwater acoustic sensor network. J. Sens. 2017, 2017, 1–8. [Google Scholar] [CrossRef]
- Rehman, M.A.; Lee, Y.; Koo, I. EECOR: An energy-efficient cooperative opportunistic routing protocol for underwater acoustic sensor networks. IEEE Access 2017, 5, 14119–14132. [Google Scholar] [CrossRef]
- Wang, K.; Gao, H.; Xu, X.; Jiang, J.; Yue, D. An energy-efficient reliable data trasmission scheme for complex environmental monitoring in uderwater acoustic sensor networks. IEEE Sens. J. 2016, 16, 4051–4062. [Google Scholar] [CrossRef]
- Diao, B.; Xu, Y.; Wang, Q.; Chen, Z.; Li, C.; An, Z.; Han, G. A reliable depth-based routing protocol with network coding for underwater sensor network. In Proceedings of the IEEE 22nd International Conference on Parallel and Distributed Systems, Wuhan, China, 13–16 December 2016. [Google Scholar]
- Morozs, N.; Mitchell, P.; Zakharov, Y.V. TDA-MAC: TDMA without clock synchronization in underwater acoustic networks. IEEE Access 2017, 6, 1091–1108. [Google Scholar] [CrossRef]
- Valente, J.F.; Alves, J.C. Real-time TDOA measurements of an underwater acoustic source. In Proceedings of the IEEE Technology Society Conference, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- Noh, Y.; Lee, U.; Wang, P.; Vieira, L.F.M.; Gerla, J.-H.C.M.; Kim, K. Hydrocast: Pressure routing for underwater sensor networks. IEEE Trans. Veh. Technol. 2016, 65, 333–347. [Google Scholar] [CrossRef]
- Bello, O.; Zen, H.; Othman, A.K.; Hamid, K.A. Computing amplify-and-forward relay amplification factor to improve total capacity at destination. Am. J. Appl. Sci. 2015, 12, 572–580. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Extent |
|---|---|
| Node’s reception mode power consumption | 0.8 W |
| Node’s transmit mode power consumption | 2–4 W |
| Node’s idle mode power consumption | 10 mW |
| Size of a single packet | 50 B |
| Size of a hello packet | 5 B |
| Transmission range | 200 m |
| No of sensor nodes | 300 |
| Acoustic speed | 1500 m/s |
| Network size | |
| Data rate | 10 kbps |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, A.; M. Altowaijri, S.; Ali, I.; Rahman, A.U. Reliability-Aware Cooperative Routing with Adaptive Amplification for Underwater Acoustic Wireless Sensor Networks. Symmetry 2019, 11, 421. https://doi.org/10.3390/sym11030421
Khan A, M. Altowaijri S, Ali I, Rahman AU. Reliability-Aware Cooperative Routing with Adaptive Amplification for Underwater Acoustic Wireless Sensor Networks. Symmetry. 2019; 11(3):421. https://doi.org/10.3390/sym11030421
Chicago/Turabian StyleKhan, Anwar, Saleh M. Altowaijri, Ihsan Ali, and Atiq Ur Rahman. 2019. "Reliability-Aware Cooperative Routing with Adaptive Amplification for Underwater Acoustic Wireless Sensor Networks" Symmetry 11, no. 3: 421. https://doi.org/10.3390/sym11030421
APA StyleKhan, A., M. Altowaijri, S., Ali, I., & Rahman, A. U. (2019). Reliability-Aware Cooperative Routing with Adaptive Amplification for Underwater Acoustic Wireless Sensor Networks. Symmetry, 11(3), 421. https://doi.org/10.3390/sym11030421