Collaborative Content Downloading in VANETs with Fuzzy Comprehensive Evaluation



Abstract
:1. Introduction
1.1. Related Work
1.2. Motivation and Contributions
- We provide a fuzzy evaluation method based on the relationship between the agent vehicle and the customer vehicle, and evaluate the agent vehicle synthetically. In our opinion, we can judge whether the vehicle is suitable for cooperation by its relevant attributes. These attributes include computing capability, bandwidth, unit cost, credibility, and path consistency between vehicles, which are meaningful data for vehicle selection. Therefore, using this information as the evaluation factor for the fuzzy comprehensive evaluation, corresponding agent vehicles for each customer vehicle are scored, and the vehicles with higher scores are selected as the priority.
- In order to satisfy the requests of more customer vehicles and maximize resource utilization, this paper proposes an agent vehicle distribution strategy based on the maximization of service quality. Our approach allocates a certain number of agent vehicle resources to each customer vehicle, and takes the bandwidth limitation of the agent vehicle into consideration, so as to select the most suitable agent vehicle for the customer vehicle and maximize overall resource utilization.
- In a simulation, the performance of the proposed algorithm is compared with other schemes. The simulation results show that the proposed algorithm can gain significant performance achievements, which demonstrates the superiority of the scheme.
- By analyzing the fuzzy relationship between multiple constraints on the target, the fuzzy comprehensive evaluation method quantifies and unifies the relationship as an index to realize vehicle selection. This method woks well in dealing with the problems of fuzzification that are constrained by many factors. Additionally, it can be used as a reference for the solutions of multi-factor constraint model problems such as mobile vehicle network selection problems, vehicle routing problems in complex environments, and so on.
2. System Model
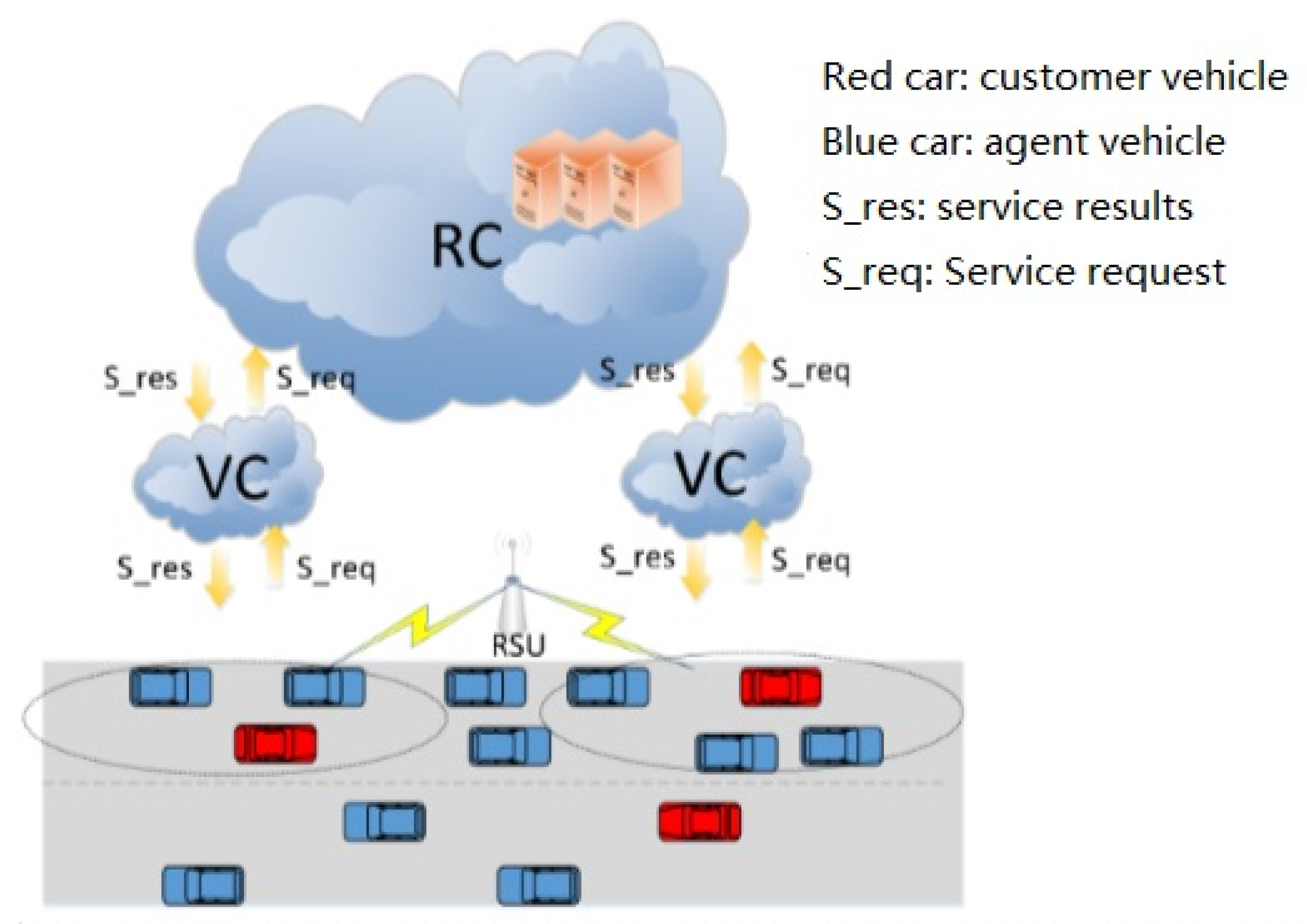
2.1. System Model
- The customer vehicle which requests cooperation, selects an agent vehicle only once every period. When the agent vehicle is selected, its map route must be consistent with the customer vehicle.
- The local server can obtain the vehicle’s navigation information (that is, the driving route of each vehicle on a map), in order to allocate an agent vehicle traveling on the same road section as the customer vehicle and reduce the waste of resources. The vehicle uploads any relevant information to the local server. The local server selects the agent vehicle for the customer vehicle according to the scheme proposed herein.
- On the basis of content consistency, the local server counts the request information of the customer vehicle and the service information of the agent vehicle. There are two forms of vehicle computing capability. The first form is collaborative computing. In this case, the computing capability of the agent vehicle is determined by the hardware of the vehicle itself, which represents the total amount of data that the agent vehicle needs to receive and send in the service. In the second form, the request of the customer vehicle is content downloading. It is set that the storage and removal of files in the vehicle are in chronological order. In this case, the computing capability of the customer vehicle is a request for the files that have not been downloaded yet, which can be part of a file or an entire file. The computing capability of the agent vehicle is the part of the file reserved in the current storage, which can be part of the file or the entire file. In this paper, the method for obtaining data from the agent vehicle will not be discussed and we assume that the agent vehicle has had the corresponding computing capability before providing services to the customer vehicle.
- If there is only one agent vehicle for more than one customer vehicle, the selected agent vehicle cannot serve more than one vehicle, and it will be allocated to the customer vehicle with the greatest satisfaction. The other customer vehicles’ requests will fail.
- According to Algorithm 1, a request fails if the customer vehicle cannot find an agent vehicle that meets its requirements.
2.2. Definitions
- Request package of customer vehicle:
- –
- CV-ID: Customer vehicle’s ID;
- –
- CV-computing: Computing capability of customer vehicle request;
- –
- CV-bandwidth: Customer vehicle’s bandwidth;
- –
- CV-path: The travel route of the customer vehicle in the process of the data request;
- –
- CV-position: Customer vehicle’s position;
- –
- CV-speed: Customer vehicle’s speed;
- Service package of agent vehicle:
- –
- AV-ID: Agent vehicle’s ID;
- –
- AV-computing: Agent vehicle’s computing capability;
- –
- AV-bandwidth: Agent vehicle’s bandwidth;
- –
- AV-path: The travel route of the agent vehicle in the process of the data service;
- –
- AV-credit: Agent vehicle’s credit;
- –
- AV-position: Agent vehicle’s position;
- –
- AV-cost: Service cost of agent vehicle in unit time;
- –
- AV-speed: Agent vehicle’s speed;
- The format of the reply message of the local server is as follow:
- –
- Server-ID: ID of the local server that communicates with the current vehicle;
- –
- Reply (N = AV-ID): if the reply message is 0, the local server finds the agent vehicle. If the reply message is a series of numbers (which are defined as positive integers), they represent the IDs of all the agent vehicles assigned to it by the local server;
3. Vehicle Network Collaborative Content Downloading Method Based on Fuzzy Comprehensive Evaluation
- Several customer vehicles send request packets to a local server. A request packet contains the requirements for an agent vehicle and the relevant information of the customer vehicle itself.
- After the local server receives the message, it uses the fuzzy comprehensive evaluation method proposed in this paper to analyze the request packet of the customer vehicle and the service packet of an agent vehicle. Then it forms the distribution plan of the agent vehicle for the customer vehicle, and sends a response message back to them.
- Response message. If the message is 0, it means that the local server did not find an agent vehicle and the customer vehicle needs to wait for the next assignment. If the message is a series of numbers (which are defined as positive integers, indicating the IDs of all the agent vehicles assigned by the local server), it means that the distribution of agent vehicles was successful, and the local server notifies the agent vehicle to serve the corresponding customer vehicle according to the allocation plan.
- After the entire communication is over, the local server records the evaluation of the agent vehicle, to update the credibility of the agent vehicle. A penalty mechanism is established to punish a vehicle which is rated poorly by the customer vehicle in this cooperation. A punished vehicle is unable to participate in the next cooperation and cannot obtain the expected rewards.
3.1. Pre-Selection of Agent Vehicles
- Computing capability c: Computing capability is the main content of requests for customer vehicles. For the agent vehicle, it decides whether it can serve the customer vehicle or not. Computing capability provided by the agent vehicle j should be better than or equal to the computing capability requested by the customer vehicle i; so as to meet the demand of the customer vehicle:
- Bandwidth b: Bandwidth determines the fluency of a customer vehicle’s data request. The bandwidth provided by the agent vehicle j should be better than or equal to the bandwidth requested by the customer vehicle i, so as to meet the need of the customer vehicle:
- Agent vehicle j should satisfy customer requests for computing capability within the time of collaboration between the two vehicles. is the effective distance between the customer and agent vehicles, and if the distance between them exceeds , then the connection will fail. L is the path length. is the average speed of the customer vehicle. is the average driving speed of the agent vehicle. Thus:
- Path consistency determines the time length of the service that a customer vehicle obtains from the agent vehicle. It indicates whether the customer vehicle can get complete service from the agent vehicle or not. The path consistency is calculated to express the ratio of the effective signal path to the whole path when the agent vehicle provides data service to the customer vehicle:
| Algorithm 1 Attaining the Available Agent Vehicle List |
| Input: Customer vehicle request package; agent vehicle service package; signal effective distance ; path length L; Output: Available agent vehicle (AV) list and path consistency , for each customer vehicle
|
3.2. Comprehensive Evaluation of Customer Satisfaction
3.2.1. The Determination of the Domain and Various Factors of Agent Vehicles:
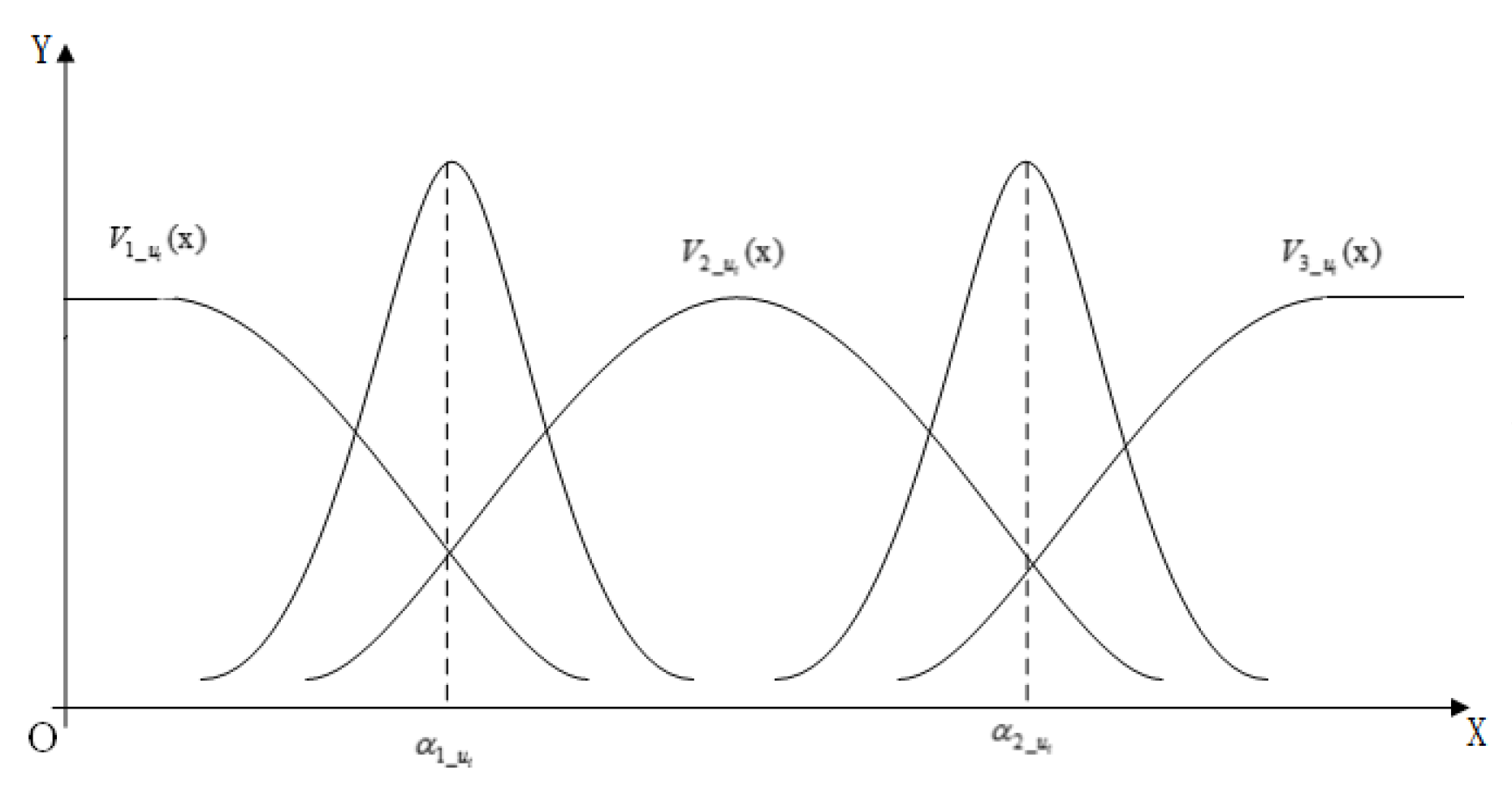
3.2.2. Determination of Membership Functions
3.2.3. Constructing the Fuzzy Evaluation Matrix
3.2.4. Determination of the Weight
3.2.5. Fuzzy Comprehensive Evaluation
| Algorithm 2 Fuzzy Comprehensive Evaluation Algorithm |
| Input: Customer vehicle request package; agent vehicle service package; signal effective distance ; path length L; available agent vehicle list for each Output: Available QoS (quality of service) for each agent vehicle j; list for customer vehicle i
|
3.3. Optimization
3.3.1. Comprehensive Vehicle Evaluation
3.3.2. Agent Vehicle Resource Allocation Algorithm
| Algorithm 3 Agent Vehicle Distribution Optimization Algorithm |
| Input: The comments on agent vehicles for each customer vehicle E Output: Collaborative offload distribution scheme X
|
4. Performance Evaluation
4.1. Experimental Setup
- Set the same driving path between the customer vehicle and the agent vehicle.
- Equip each vehicle (including the customer and agent vehicles) with an OBU, which can receive information and transmit information to the surrounding vehicles, and set the effective communication range of the vehicle.
- There are only two forms of data transmission between a customer vehicle and an agent vehicle: completion and failure.
- Each vehicle can act as a customer vehicle when requesting data and an agent vehicle when providing data service, but it can only be one in a period.
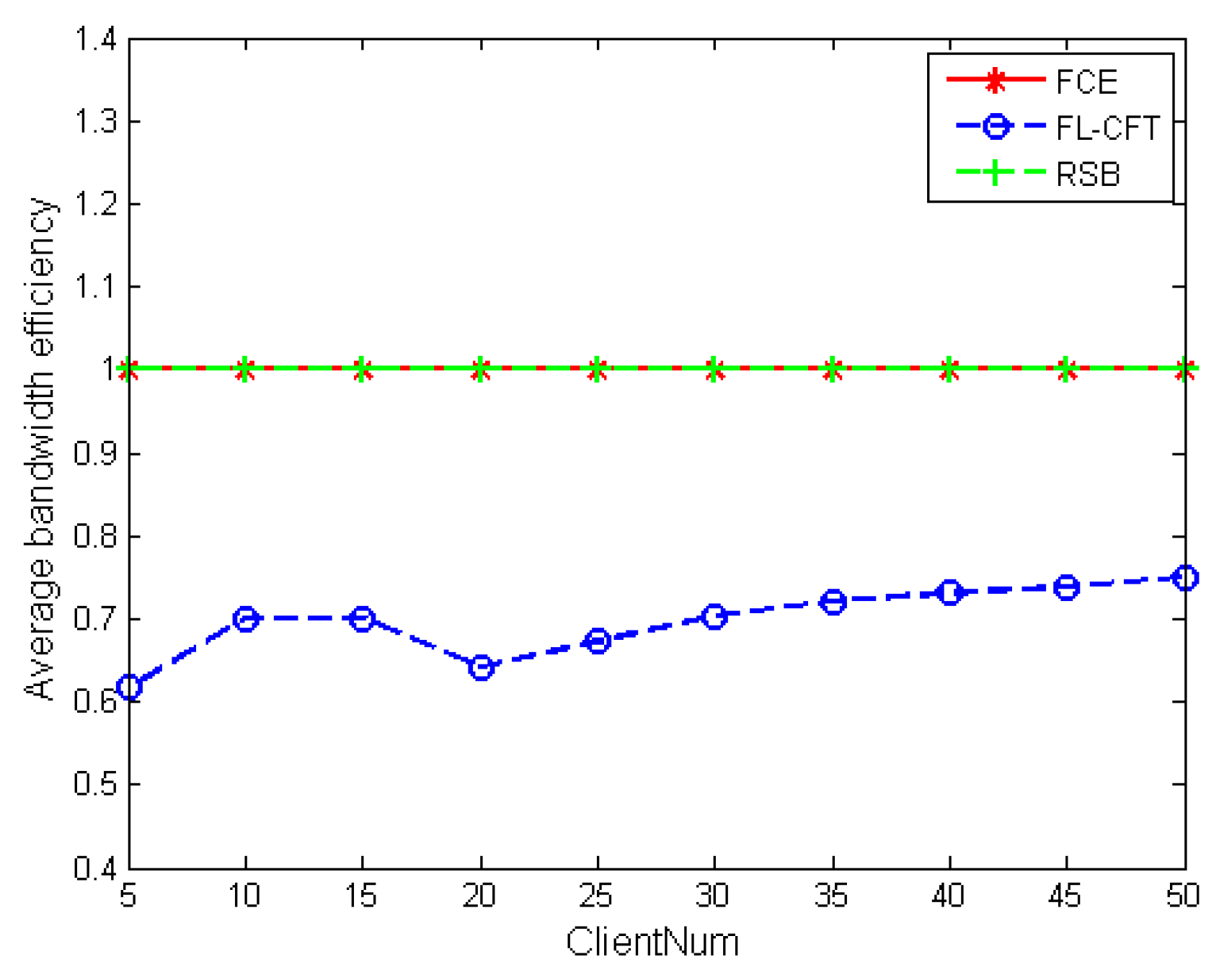
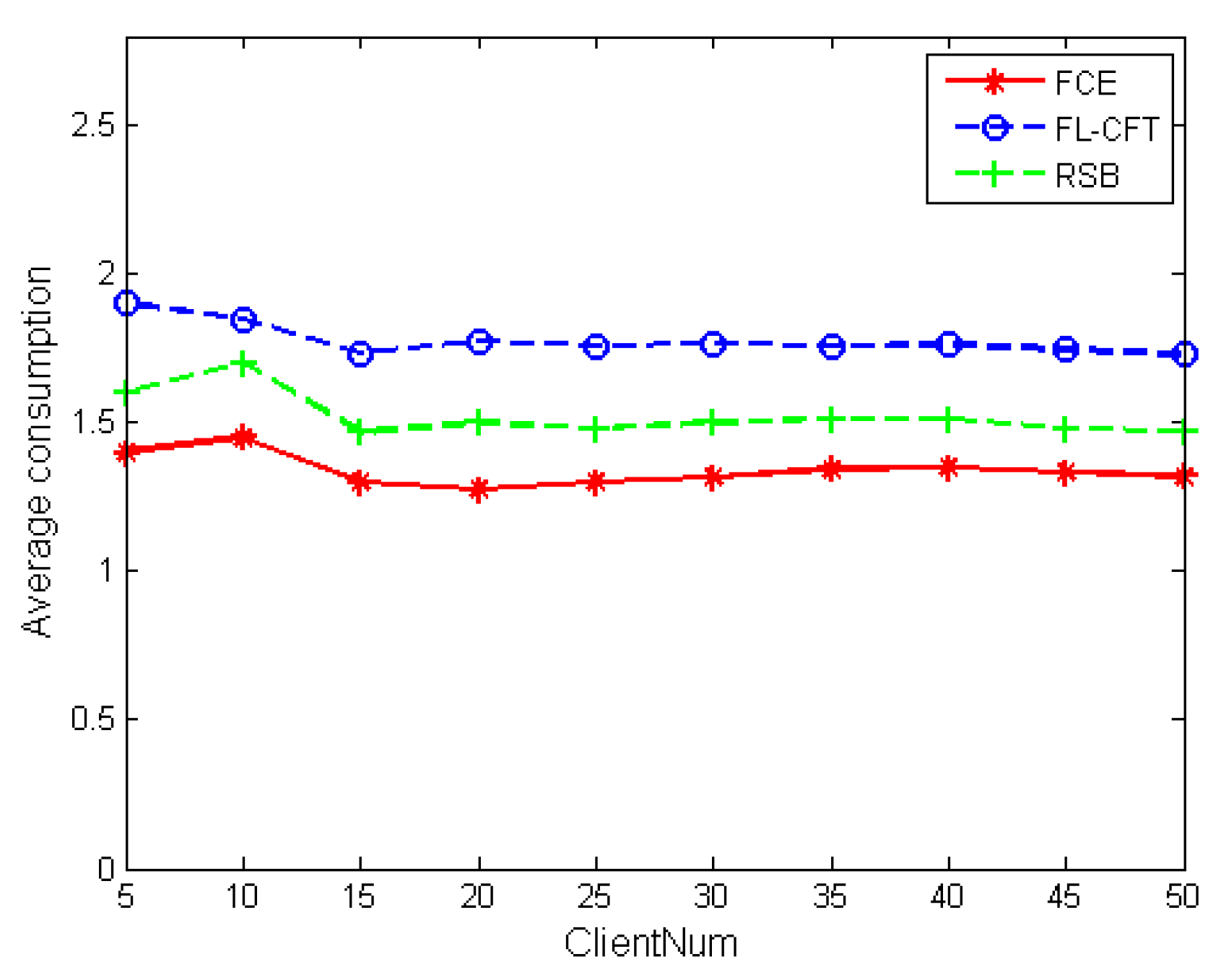
4.2. Performance Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected Vehicles: Solutions and Challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Amadeo, M.; Campolo, C.; Molinaro, A. Information-centric networking for connected vehicles: A survey and future perspectives. IEEE Commun. Mag. 2016, 54, 98–104. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, N.; Bi, Y.; Yu, Q.; Shen, X.S.; Shan, D.; Bai, F. TV White Space Enabled Connected Vehicle Networks: Challenges and Solutions. IEEE Netw. 2017, 31, 6–13. [Google Scholar] [CrossRef]
- Lim, J.H.; Kim, W.; Naito, K.; Yun, J.H.; Cabric, D.; Gerla, M. Interplay Between TVWS and DSRC: Optimal Strategy for Safety Message Dissemination in VANET. IEEE J. Sel. Areas Commun. 2014, 32, 2117–2133. [Google Scholar] [CrossRef]
- Wang, M.; Shan, H.; Luan, T.H.; Lu, N.; Zhang, R.; Shen, X.; Bai, F. Asymptotic Throughput Capacity Analysis of VANETs Exploiting Mobility Diversity. IEEE Trans. Veh. Technol. 2015, 64, 4187–4202. [Google Scholar] [CrossRef]
- Ota, K.; Dong, M.; Chang, S.; Zhu, H. MMCD: Cooperative downloading for highway VANETs. IEEE Trans. Emerg. Top. Comput. 2015, 3, 34–43. [Google Scholar] [CrossRef]
- Yue, D.; Li, P.; Zhang, T.; Cui, J.; Jin, Y.; Liu, Y.; Liu, Q. Cooperative Content Downloading in Hybrid VANETs: 3G/4G or RSUs Downloading. In Proceedings of the 2016 IEEE International Conference on Smart Cloud (SmartCloud), New York, NY, USA, 18–20 November 2016. [Google Scholar]
- Liu, J.; Ge, Y.; Li, S.; Shu, R.; Ding, S. A transmission scheduling method of cooperative downloading for Vehicular Networking. In Proceedings of the 2014 14th International Symposium on Communications and Information Technologies (ISCIT), Incheon, Korea, 24–26 September 2015. [Google Scholar]
- Huang, W.; Wang, L. ECDS: Efficient collaborative downloading scheme for popular content distribution in urban vehicular networks. Comput. Netw. 2016, 101, 90–103. [Google Scholar] [CrossRef]
- Wang, T.; Song, L.; Han, Z.; Lu, Z.; Hu, L. Popular content distribution in vehicular networks using coalition formation games. In Proceedings of the 2013 IEEE International Conference on Communications (ICC), Budapest, Hungary, 9–13 June 2013. [Google Scholar]
- Wang, J.; Wang, S.; Sun, Y.; Changchun, Y.; Lu, W.; Wu, D. An incentive mechanism for cooperative downloading method in VANET. In Proceedings of the 2013 IEEE International Conference on Vehicular Electronics and Safety, Dongguan, China, 28–30 July 2013. [Google Scholar]
- Wu, C.; Gerla, M.; Mastronarde, N. Incentive driven LTE content distribution in VANETs. In Proceedings of the 2015 14th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), Vilamoura, Portugal, 17–18 June 2015. [Google Scholar]
- Zhou, H.; Liu, B.; Luan, T.H.; Hou, F.; Gui, L.; Li, Y.; Yu, Q.; Shen, X.S. ChainCluster: Engineering a Cooperative Content Distribution Framework for Highway Vehicular Communications. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2644–2657. [Google Scholar] [CrossRef]
- Lai, C.; Zhang, K.; Cheng, N.; Li, H.; Shen, X. SIRC: A Secure Incentive Scheme for Reliable Cooperative Downloading in Highway VANETs. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1559–1574. [Google Scholar] [CrossRef]
- Zhang, W.; Jiang, S.; Zhu, X.; Wang, Y. Privacy-Preserving Cooperative Downloading for Value-Added Services in VANETs. In Proceedings of the International Conference on Intelligent Networking & Collaborative Systems, Xi’an, China, 9–11 September 2013. [Google Scholar]
- Liu, J.; Zhang, W.; Wang, Q.; Li, S.; Chen, H.; Cui, X.; Sun, Y. A Cooperative Downloading Method for VANET Using Distributed Fountain Code. Sensors 2016, 16, 1685. [Google Scholar] [CrossRef] [PubMed]
- Molisch, A.F.; Mehta, N.B.; Yedidia, J.S.; Zhang, J. Performance of Fountain Codes in Collaborative Relay Networks. IEEE Trans. Wirel. Commun. 2007, 6, 4108–4119. [Google Scholar] [CrossRef]
- Lin, C.C.; Deng, D.J.; Yao, C.C. Resource allocation in vehicular cloud computing systems with heterogeneous vehicles and roadside units. IEEE Internet Things J. 2017, 5, 3692–3700. [Google Scholar] [CrossRef]
- Luo, Q.; Cai, X.; Luan, T.H.; Ye, Q. Fuzzy logic-based integrity-oriented file transfer for highway vehicular communications. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 3. [Google Scholar] [CrossRef]
- Liu, J.; Zhai, H.; Jia, Z.; Li, S.; Chen, H.; Cui, X. A balanced cooperative downloading method for VANET. In Proceedings of the 2016 16th International Symposium on Communications and Information Technologies (ISCIT), Qingdao, China, 26–28 September 2016. [Google Scholar]
- Huang, C.M.; Yang, C.C.; Lin, H.Y. A bandwidth aggregation scheme for member-based cooperative networking over the hybrid VANET. In Proceedings of the 2011 IEEE 17th International Conference on Parallel and Distributed Systems (ICPADS), Tainan, Taiwan, 7–9 December 2011. [Google Scholar]
- Deng, G.; Li, F.; Wang, L. Cooperative downloading in vanets-lte heteroge- neous network based on named data. In Proceedings of the 2016 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Hao, Y.; Tang, J.; Cheng, Y. Secure cooperative data downloading in ve- hicular ad hoc networks. IEEE J. Sel. Areas Commun. 2013, 31, 523–537. [Google Scholar]
- Mezghani, F.; Dhaou, R.; Nogueira, M.; Beylot, A.L. Offloading Cellular Networks Through V2V Communications—How to Select the Seed-Vehicles? In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar]
- Jiang, D.; Huo, L.; Lv, Z.; Song, H.; Qin, W. A Joint Multi-Criteria Utility-Based Network Selection Approach for Vehicle-to-Infrastructure Networking. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3305–3319. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Layer | Factor Layer |
|---|---|
| Vehicle selection result | Computing capability |
| Bandwidth | |
| Unit cost | |
| Credibility | |
| Path consistency |
| Parameter | Number | Unit | Information Description |
|---|---|---|---|
| L | 3000 | m | Path length |
| 200 | m | Effective distance between the customer vehicle and the agent vehicle | |
| n | 50 | Number of customer vehicles requesting data | |
| m | 300 | Number of agent vehicles providing data services | |
| 20–80 | Mb | Computing capability of customer vehicle i’s request | |
| 3–12 | Mbps | Bandwidth of customer vehicle i | |
| 20-35 | m/s | Speed of customer vehicle i | |
| 20–80 | Mb | Computing capability of agent vehicle j | |
| 3–12 | Mbps | Bandwidth of agent vehicle j | |
| 0–3 | Service cost of agent vehicle j in unit time | ||
| 0–1 | Accumulated credit ratio of agent vehicle j | ||
| 20–35 | m/s | Speed of agent vehicle j | |
| 0–1 | Path consistency between customer vehicle i and agent vehicle j | ||
| The list of agent vehicles available for customer vehicle i | |||
| Connection status between customer vehicle i and agent vehicle j | |||
| Available QoS list of agent vehicle j to customer vehicle i |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, T.; Guo, X.; Zhang, Y.; Chang, Z. Collaborative Content Downloading in VANETs with Fuzzy Comprehensive Evaluation. Symmetry 2019, 11, 502. https://doi.org/10.3390/sym11040502
Huang T, Guo X, Zhang Y, Chang Z. Collaborative Content Downloading in VANETs with Fuzzy Comprehensive Evaluation. Symmetry. 2019; 11(4):502. https://doi.org/10.3390/sym11040502
Chicago/Turabian StyleHuang, Tianyu, Xijuan Guo, Yue Zhang, and Zheng Chang. 2019. "Collaborative Content Downloading in VANETs with Fuzzy Comprehensive Evaluation" Symmetry 11, no. 4: 502. https://doi.org/10.3390/sym11040502
APA StyleHuang, T., Guo, X., Zhang, Y., & Chang, Z. (2019). Collaborative Content Downloading in VANETs with Fuzzy Comprehensive Evaluation. Symmetry, 11(4), 502. https://doi.org/10.3390/sym11040502