2.1. Position and Orientation Parameters
In Newtonian mechanics, the dynamics of the rigid bodies are studied based on the assumption that they do not deform under the action of the external forces.
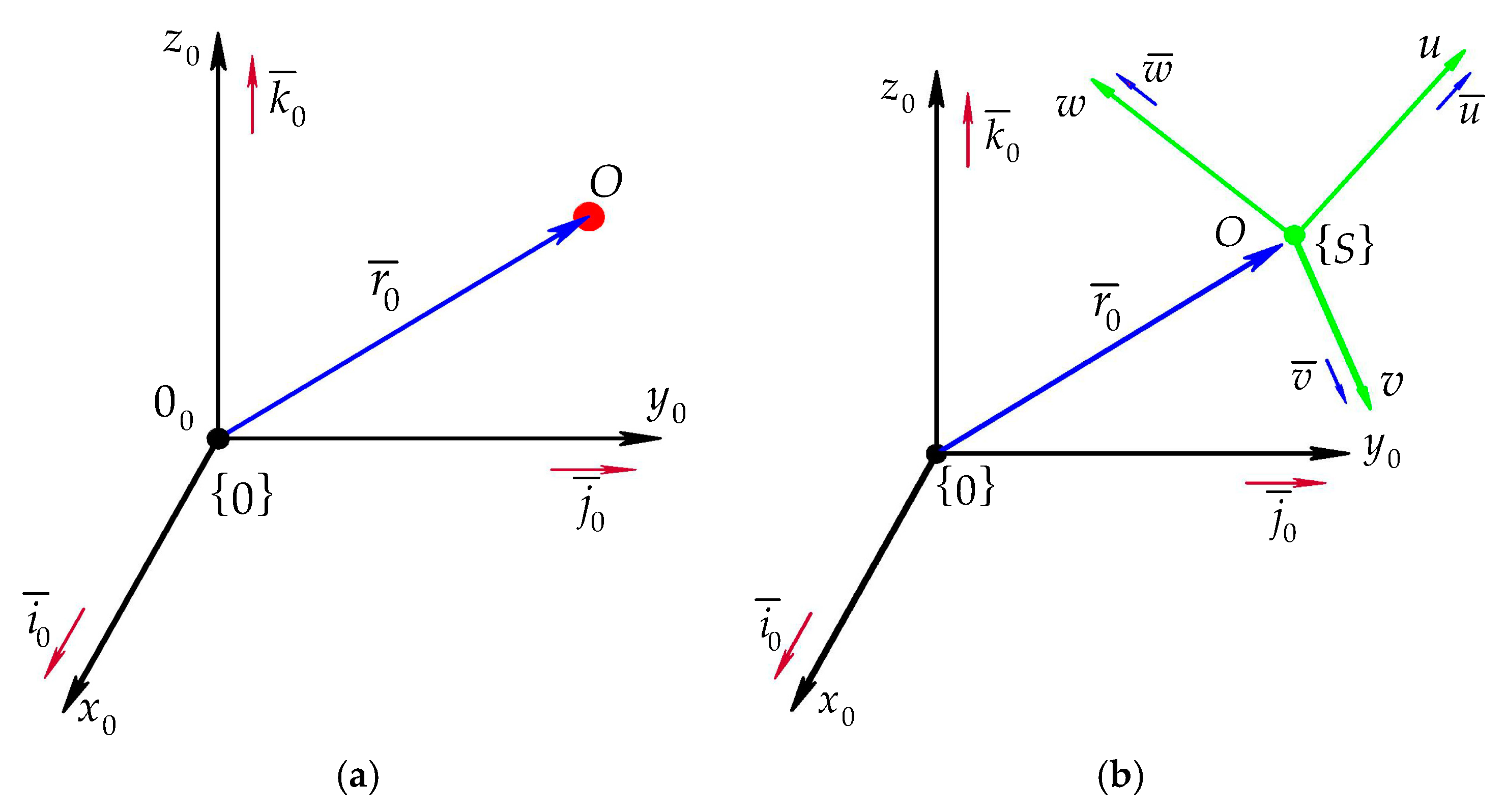
To study the dynamical behavior of a rigid body, its linear and angular position in the Cartesian space must be known at each moment during the motion. To define the linear and angular position, [
13,
20], the last one being also known as orientation, the simplest mechanical model, which is the material point, is analyzed (
Figure 1).
The following notations are considered:
In the Expression (1), the coordinates or axes of the Cartesian frame, symbols from (2) representing the unit vectors, and (3) the angles and the direction cosines are defined.
The dynamic study of the rigid solid is carried out, according to
Figure 1, by considering two reference systems:
, which is considered fixed and
which is a mobile reference system, invariably linked to the body, having the origin in an arbitrary point
belonging to the rigid body. The system
, represented in the same figure, is a system which originated in point
, and whose orientation is maintained constant all throughout the movement and is identical with the orientation of the fixed system,
, that is
.
The geometrical state of any material point (for example a certain point
) characterizes the position, according to
Figure 1a. The position is usually defined by means of the position vector:
The three linear coordinates from (5) are independent in the case of a free material point, and represents the degrees of freedom (
d.o.f.). Further, the study is extended to a vector or an axis belonging to the Cartesian frame (see
Figure 1b). This geometrical state is called orientation (angular position). Orientation (angular position) is defined through unit vectors. For any given unit vector
, in relation to one of the frames
/
, the orientation is defined by the direction cosines:
According to linear algebra, in expression (6), the symbol defines the transposed matrix.
Further, considering the second expression from (6), the orientation of any vector or axis is characterized by two independent angles. The above geometrical aspects are extended on an orthogonal and right oriented frame (see
Figure 1b,
) relative to
. In this case, the geometrical state is defined by position and orientation. The position is defined by means of position vector (5), while for orientation the rotation matrix is considered [
10]:
The resultant orientation matrix defined with (7), contains the unit vectors of
frame relative to
. The rotation matrix or the matrix of direction cosines describes the orientation of each axis of the mobile frame attached to the rigid body, relative to a fixed frame. Between the nine direction cosines contained by the rotation matrix, six mathematical relations can be established. Thus, the result is that the orientation of a mobile frame with respect to a fixed frame is defined by up to three independent parameters, which are defining the orienting angles. Therefore, the resultant orientation of a frame
with respect to another frame,
/
is characterized by three independent orientation angles (three d.o.f), [
13]:
The angles from (8) are the components of the column matrix of orientation
, and they describe, from a geometrical point of view, dihedral angles between two geometrical planes:
Physically, the three angles defined with (8) expresses a simple rotation around one of the axes of the Cartesian reference system:
. Based on research from [
10,
11,
12,
13,
14], when combining the three simple rotations, there is a result of twelve sets of orientation angles (8). Taking
, the expressions of definition are further developed for the three simple rotation matrices symbolized as:
The paper proposes the following form of mathematical representation for the generalized matrix:
By substituting (11) and (12) in the generalized expression (10), the simple rotation matrices (9) are obtained. The generalized matrix can be written in a new formulation as follows:
In the expression (13), the symbol
defines the skew-symmetric matrix associated to (15), while
represents the diagonal matrix, written below:
By applying (14) and (15), an expression identical with the classical Rodriguez formula is obtained [
17]:
According to research from [
3,
4,
5,
6,
7,
8,
9,
10], the three simple rotations from (8) are performed either around the moving axes or fixed axes belonging to
or
/
. The resultant rotation matrix, symbolized as
, defines the orientation of the system
( attached to the rigid body), with respect to a fixed system
, and
is represented in the following matrix form:
Using the research in the field of matrix exponentials [
10,
14], the following form for the resultant rotation matrix (18) is written as:
The above mathematical Expressions (5) and (8), which define the position and orientation in the case of a rigid body, are written in a general form. Based on the definitions from the first paragraph of this section, a rigid body consists of an infinite number of material points and also, an infinite number of geometrical axes, parallel and perpendicular one to another, characterized by a continuous distribution in the entire volume of the rigid
[
14,
15]. The rigid body is also made up of an infinite number of assemblies consisting of three orthogonal geometrical plans, continuously distributed in the entire volume of the rigid body.
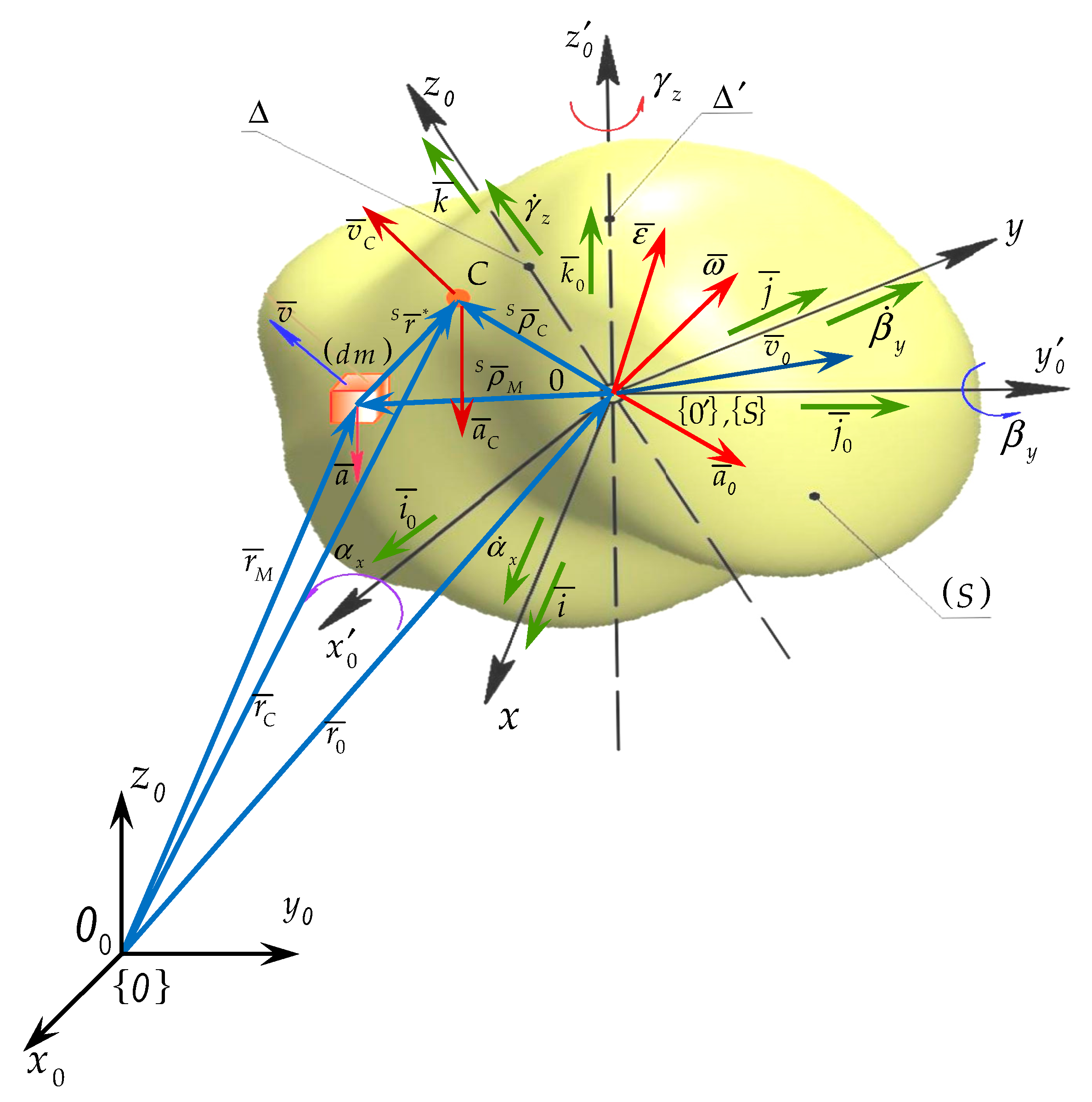
In terms of geometry, in order to define a right oriented reference frame having the origin in an arbitrary point
of the rigid body, a single ensemble composed of three orthogonal geometrical plans is chosen. According to (4) and
Figure 2, this reference frame is symbolized as
. The reference frame
is linked to the body due to its rigid nature. Expressions (5) and (8) define the position and orientation of this frame.
Whereas the present paper proposes a study on advanced dynamics, it considers two material points belonging to a rigid body, so that the following conditions are met:
and
. In this case, the expressions defining the position can be written as time functions, according to [
12]:
Based on (18) and (19), the position equation is written, by considering the matrix exponentials:
The position equation for any material point from the rigid body can be determined only when the position
and orientation
of the moving frame
are well known. By analyzing the Expressions (21) and (22), the result is that the orientation is invariant for all the points of the rigid solid. Thus, by considering the geometrical aspects, the body is substituted by the moving frame
. This is defined from a geometrically point of view by means of the six independent parameters (
six d.o.f.), which are included in the following symbol:
where
is the generalized coordinate and
is an operator which highlights the type of driving joint. In this paper, the symbol
, is substituted as:
Considering Expression (24), the following notations are implemented:
where
represents the order of the time derivative.
In advanced mechanics, instead of (8), in the case of the angular vector of orientation, the following expression of definition is used:
where
represents the angular transfer matrix which is a function of the orienting angles.
In mechanics, the position and orientation of a moving frame
, with respect to another frame, for example a fixed frame
, is represented in a matrix form, according to [
5,
8] by means of homogeneous transformations which are developed using matrix exponentials:
Expression (30) defines the position vector of the mobile system
relative to fixed system
, while (31) represents a position vector, which according to [
11,
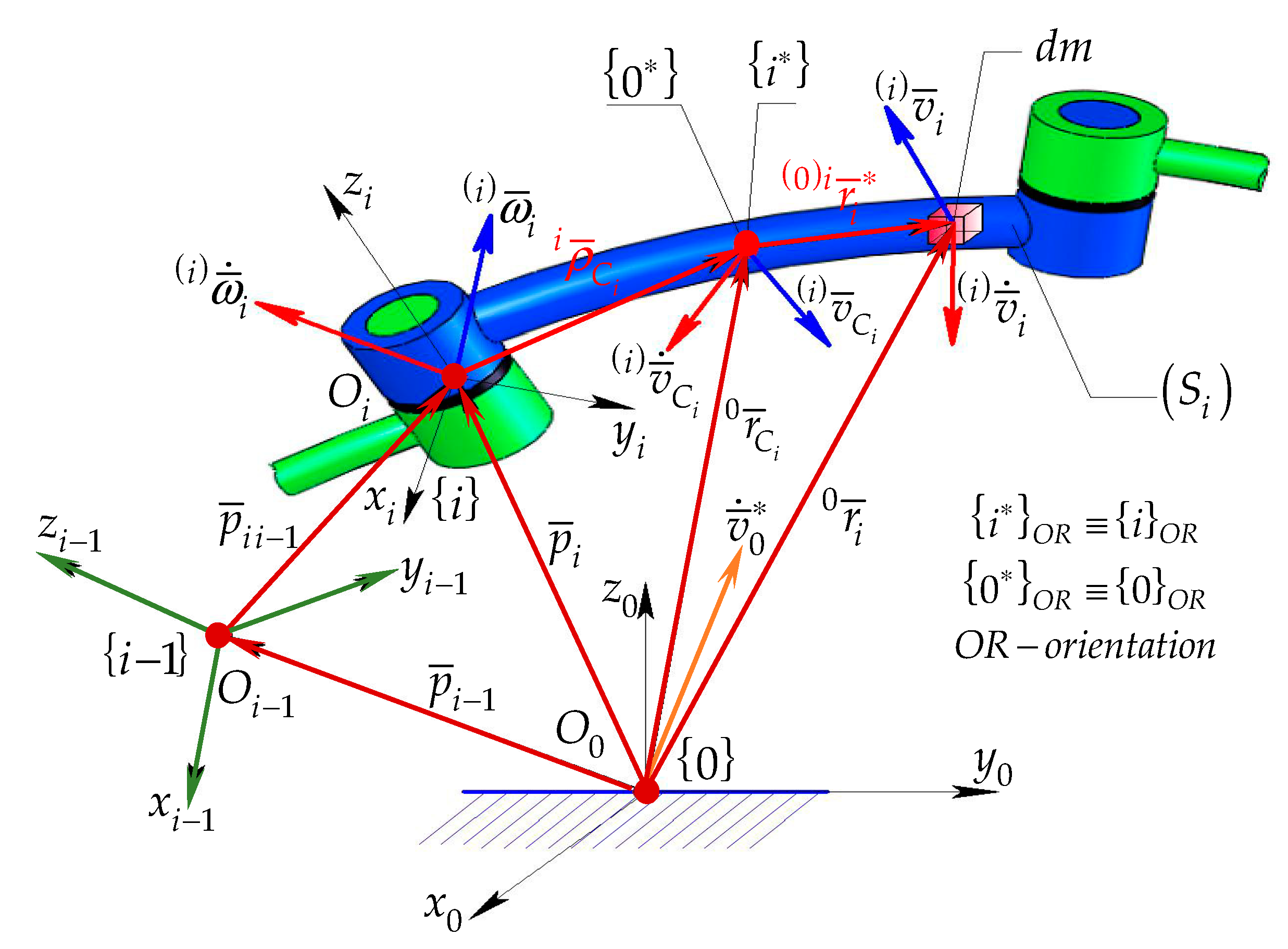
20], is defined by means of homogenous coordinates as a function of screw parameters. The conclusions and expressions of definition, synthetically disseminated in this introductory section, are compulsory applied in the advanced kinematics and dynamics of mechanical systems. For example, a kinetic element from this mechanical structure of a robot is considered (
Figure 3).
In case of both rigid bodies and multibody systems, the dynamical study of current and sudden motions is performed. The study is based on the differential principles from analytical dynamics of systems, as well as on the advanced notions from the dynamics of solid bodies: Momentum and angular momentum, kinetic energy, acceleration energies of different orders and their absolute time derivatives of the high order.
2.2. The Kinematic Parameters of Higher Order
The parametric equations of motion are defined according to (24). The absolute position Equation (21) shows the variable distribution from a point to another material point of the body. By applying the first order time derivative on Expression (21), the result is:
The following property is mandatory for the motion equations defined with (32):
where considering [
1,
10],
is the skew symmetric matrix associated to the angular velocity vector.
The time derivatives of the higher order, applied on the property (32), are defined as follows:
In advanced kinematics and dynamics, the time derivatives of the higher order for rotation matrices and position vectors must be used according to [
10,
11,
12,
13] as follows:
The symbols: and represent the order of the time derivatives applied on expressions (35) and (36).
The expressions of definition for angular velocities, and then for the angular accelerations are:
By analyzing (38), it is noticed that the expressions of the kinematic parameters that define the resultant rotation motion are written based on the matrix exponential functions.
Both velocities and accelerations of the higher order are established based on the following vectors:
where the orientation vector is defined according to the following expressions: (8), (19), (27) and (28).
An essential component (28) included in (40), known as the angular transfer matrix, can be defined as a function of a set of the orientation angles. Considering (39) and (40), it is observed that they are functions of generalized variables (24) and (25). Actually, the six generalized variables are the independent parameters of the position and orientation from (24). Using the research from [
10,
11,
12,
13,
14], the on-time functions associated to position (39) and orientation (40) vectors and the differential properties which are compulsory and applied in advanced kinematics and dynamics, have been developed:
The symbols and from (41) and (42) define the deriving orders with respect to time.
The expression (44) defines the angular and linear accelerations of the higher order for a rigid solid in general motion. The input expressions and parameters of the higher order are compulsory and applied in the definition of the dynamic notions of the higher order, such as the momentum, angular momentum, kinetic energy and acceleration energy of the higher order.
They have been included in the dynamics theorems which applies to current and sudden motions.
The next step consists of establishing the time variation law for the generalized coordinates and generalized variables of the higher order. Considering [
9], the result is that all parameters from advanced kinematics are functions of generalized variables as well as of their time derivatives and they can be developed by using polynomial interpolation functions [
13,
20]. The following general form for the polynomial interpolation functions of the higher order is used:
For every trajectory interval
, the number of unknowns is
, and their significance is:
To determine the unknowns, (50) is required to apply geometrical and kinematical constraints:
The kinematical constrains that can be applied in the case of polynomials of the higher order are:
Finally, Expression (45) is substituted in the advanced notions of kinematics and dynamics.
2.3. The Mass Properties
In order to find an exact geometrical solution, it is considered that the rigid body consists of an infinite number of material particles for which the distance between two points is maintained constant, regardless of the forces that act upon it. The elementary particles, characterized by elementary and infinitesimal mass, have a continuous distribution in the geometrical shape of the solid body.
When the density is constant inside the rigid structure, the solid rigid is homogeneous. When the integration limits applied on the geometrical outline are well defined, it results in a homogeneous body with a simple or regular shape. In this last case, the geometrical and mass integrals are applied.
An essential aspect in advanced dynamics is represented by mass properties [
13] The mass and the position of the mass center is determined in relation with
frame, as presented:
In the expression (51), defines the density of the material, where the symbol represents, by case, the volume (V), the area (A) or the length (L) of the rigid body subjected to study
The position of the mass center, with respect to the
reference frame, is expressed at first in a classical form, and then by using matrix exponentials as:
By applying the time derivative on (53), the linear velocity and acceleration of the mass center are determined:
Using classical Formulations (52) and (53), the result is the expressions for the acceleration of mass center:
In dynamic modeling, the following expression is necessary:
In the case of rigid bodies involved in rotation motion, the inertia property is highlighted by the mechanical moments of inertia [
12,
13,
14]. According to
Figure 2, the position of the elementary mass
relative to the mass center is defined by means of the vector:
.
Considering (52), the following mass property is obtained:
Based on research [
12,
13], the inertial tensor and its variation law relative to the concurrent frames applied in the mass center:
is established, according to:
where
is inertial tensor axial and centrifugal of the body
in with relation with
frame, applied in the mass center
, having the property:
:
Since the dynamic study refers to the absolute motion, the use of the following expressions of the inertial tensor are required:
The matrix expression (60) represents the generalized variation law of the inertial tensor axial and centrifugal with respect to the frame
. Further, in the expression (60),
is the inertia matrix axial and centrifugal of the mass center relative to
. The inertial tensor axial and centrifugal is defined with respect to the absolute frame
, as presented below:
In the Expression (61), represents the inertia matrix containing axial and centrifugal inertia moments, which is determined with respect to the fixed system .












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}