Autonomous Detection for Traffic Flow Parameters of a Vehicle-Mounted Sensing Device Based on Symmetrical Difference

Abstract
:1. Introduction
2. Materials and Methods
2.1. Autonomous Detection Method for a Traffic Flow of Vehicle-Mounted Sensor Based on Symmetrical Difference
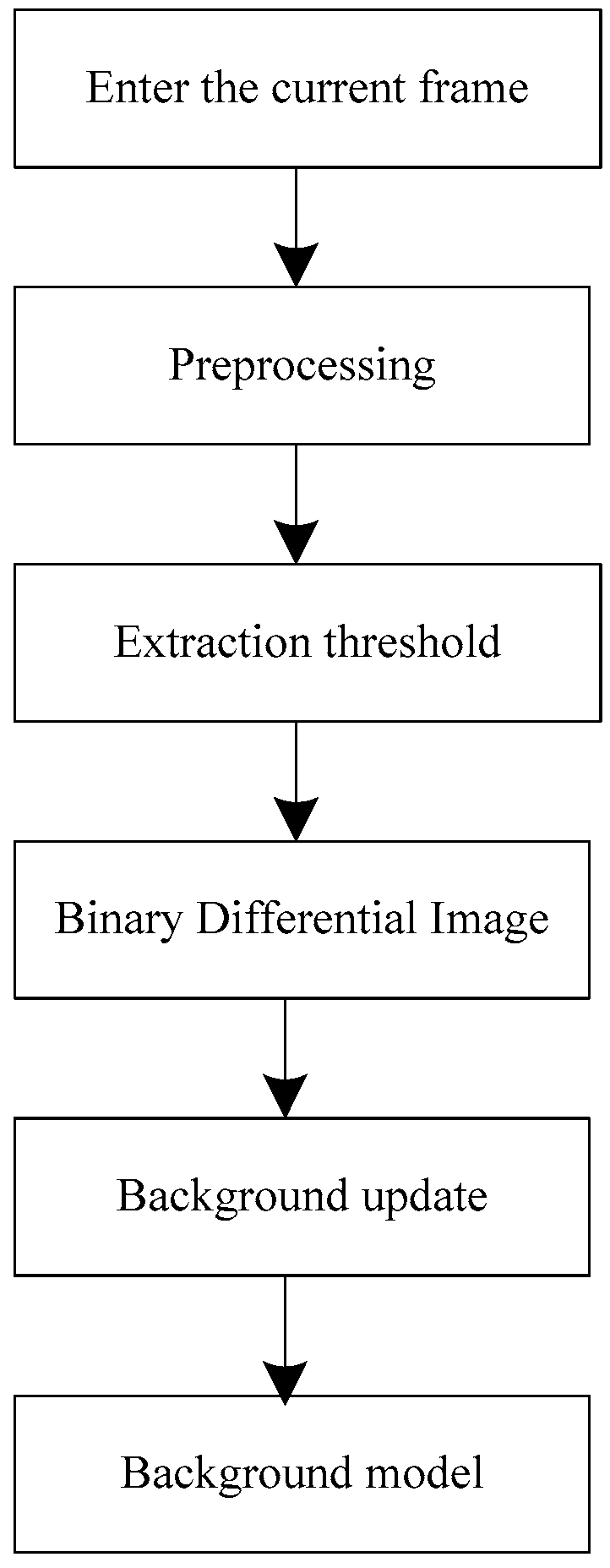
2.1.1. Establishment and Update of Background Model
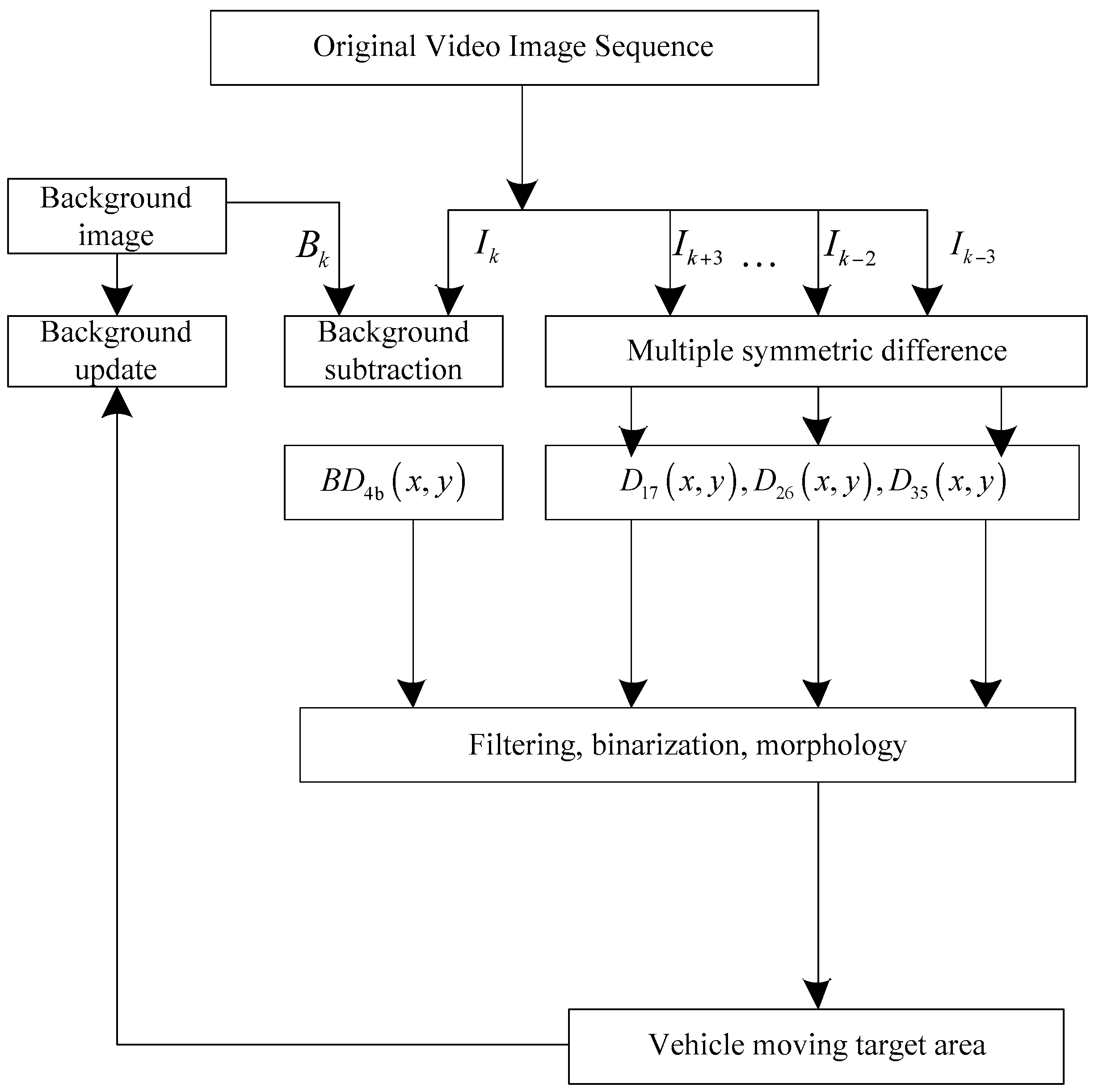
2.1.2. Autonomous Detection of Traffic Flow Parameters Based on the Fusion of Multiple Symmetric Differences and Background Subtraction Target Extraction
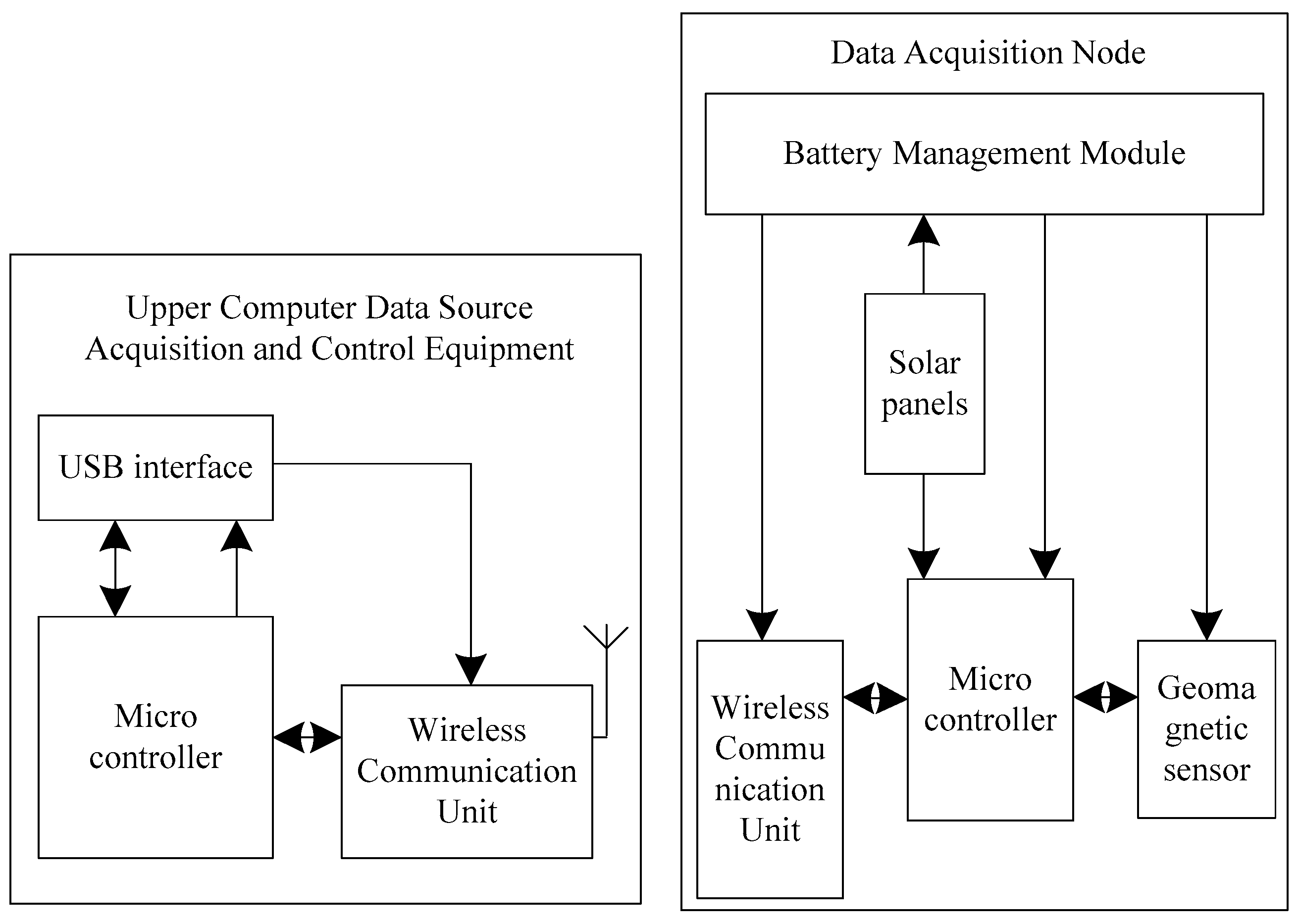
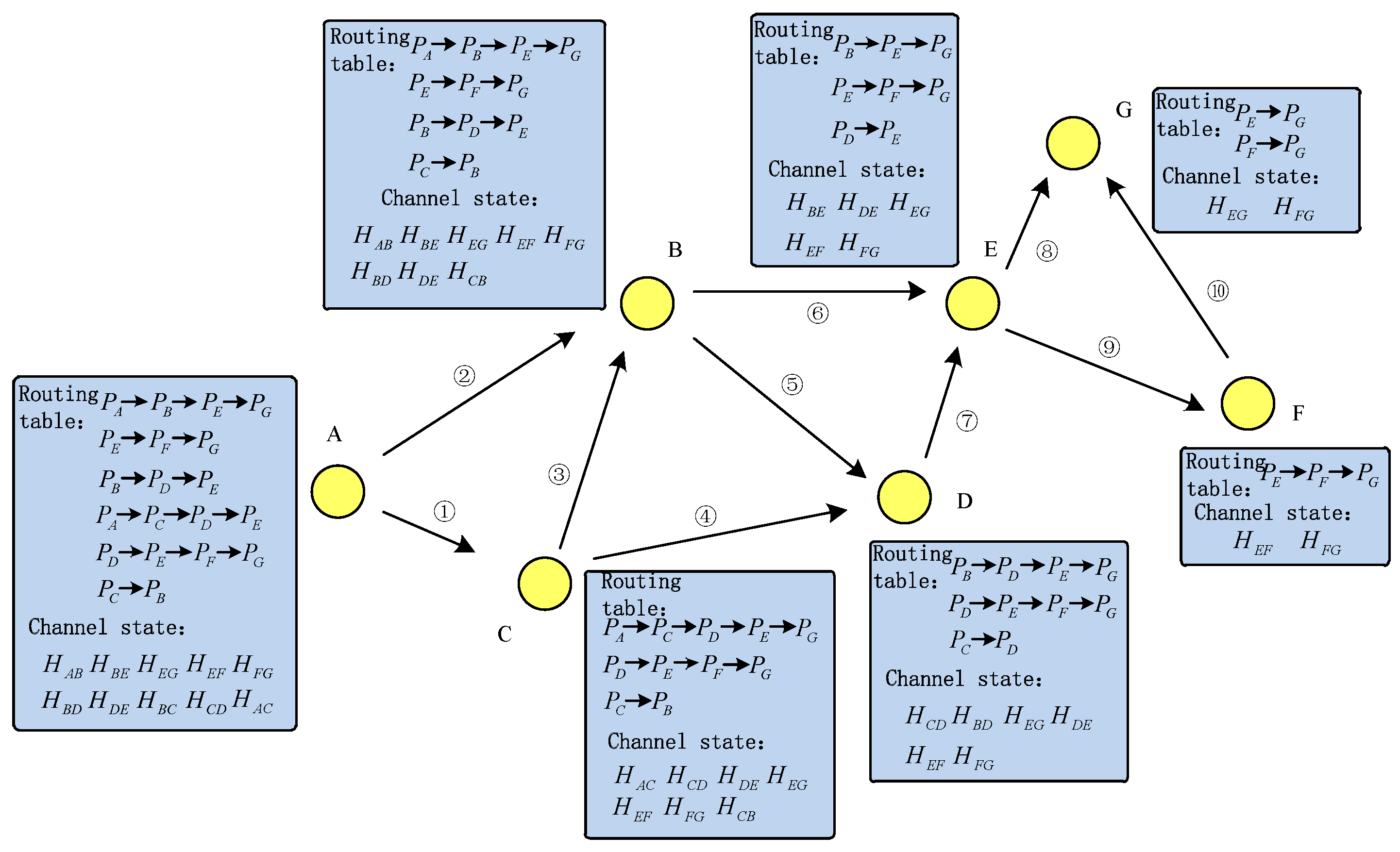
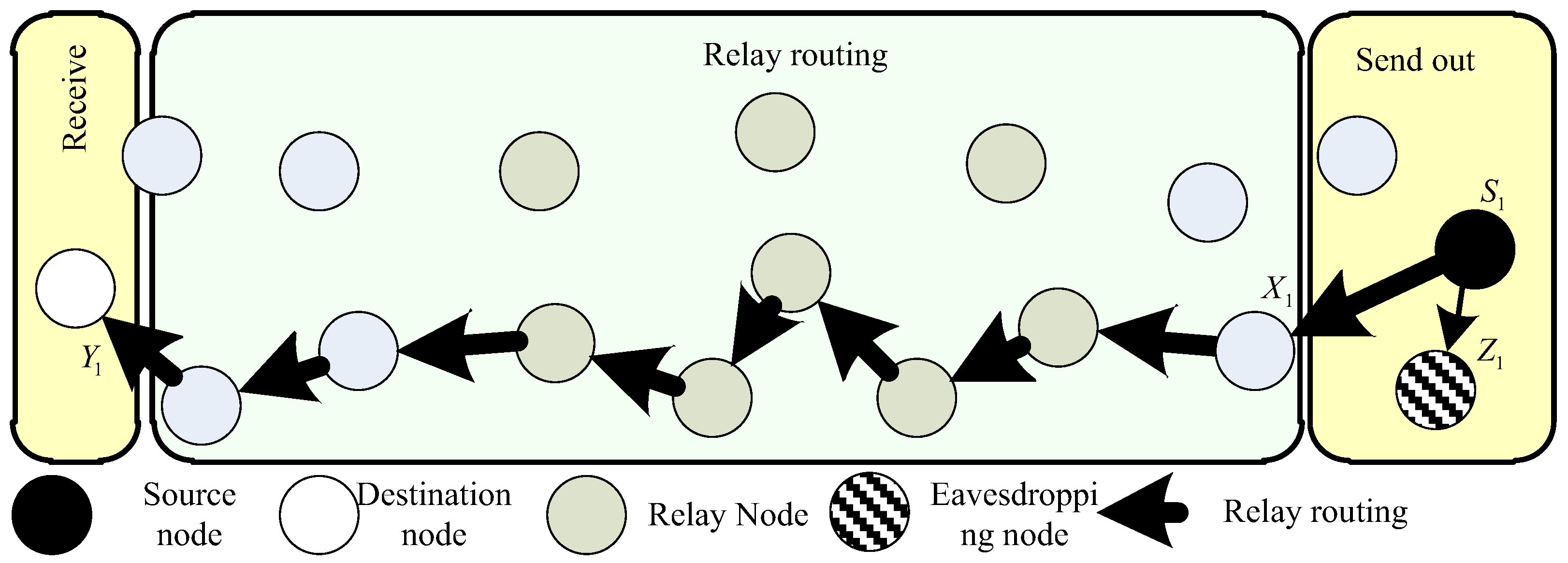
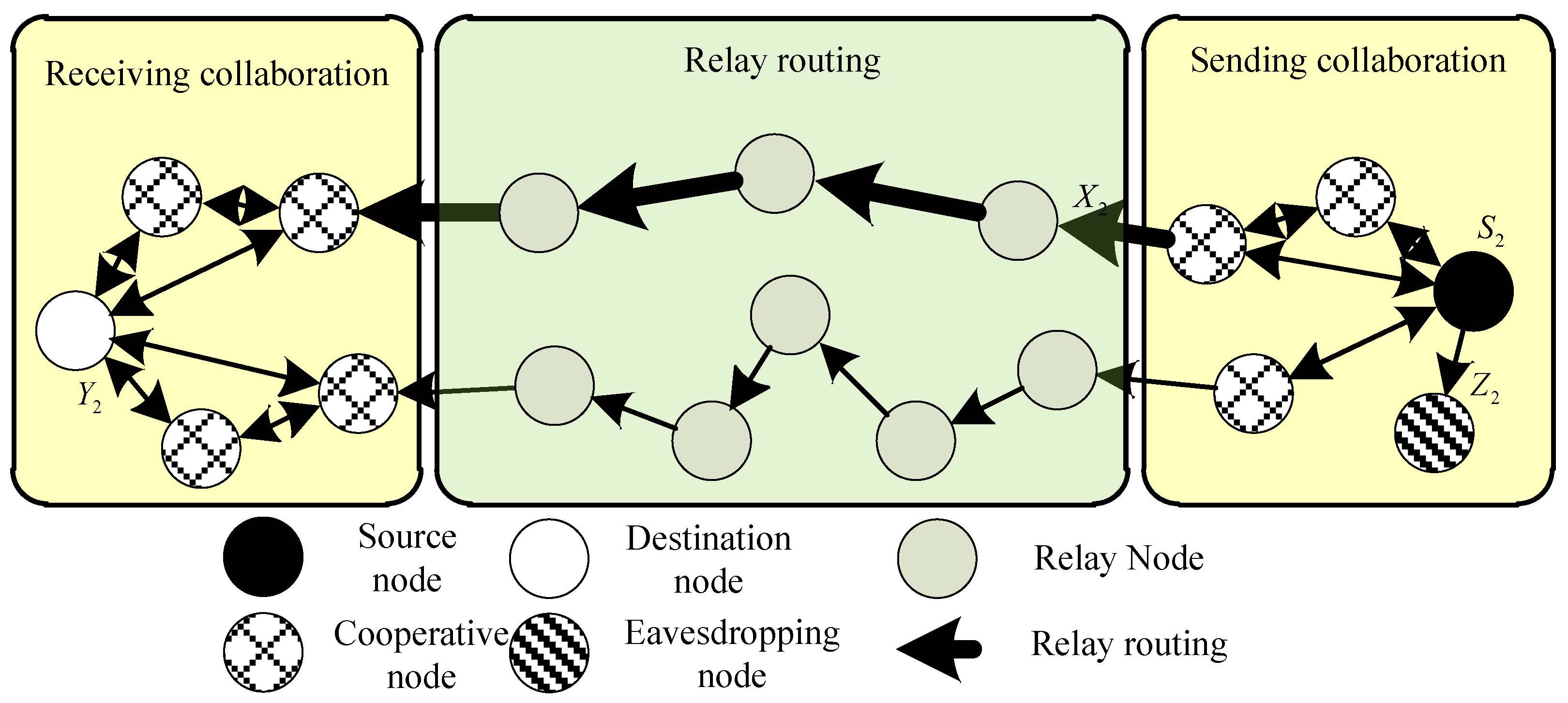
2.2. Architecture Design
3. Results
3.1. Experimental Environment and Parameter Setting
3.2. Experimental Test Index
- (1)
- The accuracy of traffic flow parameters under noise interference.
- (2)
- The accuracy of traffic flow parameters under light interference.
- (3)
- The denoising performance.
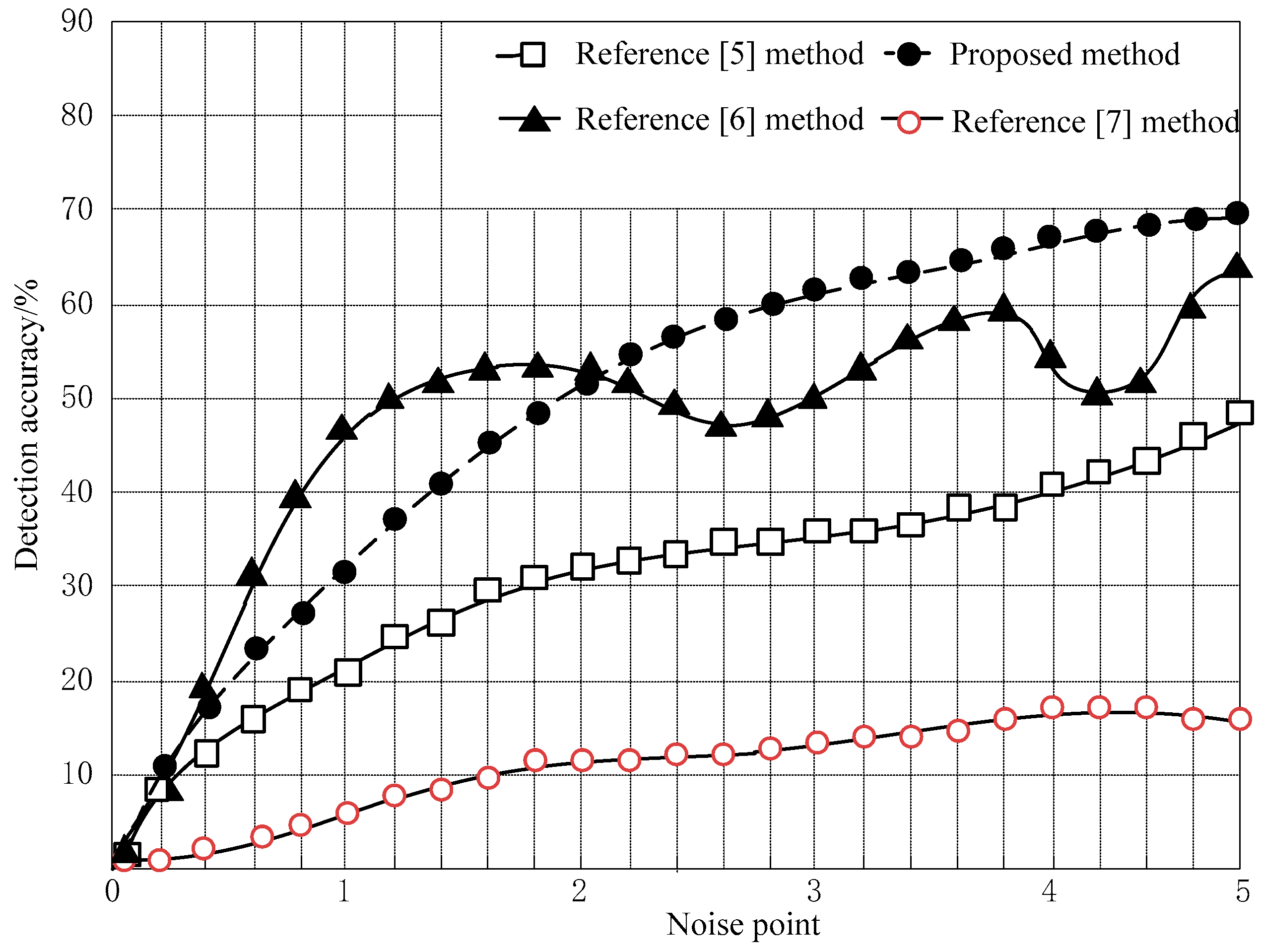
3.3. Comparison of Independent Detection Accuracy of Traffic Flow Parameters under Noise Interference
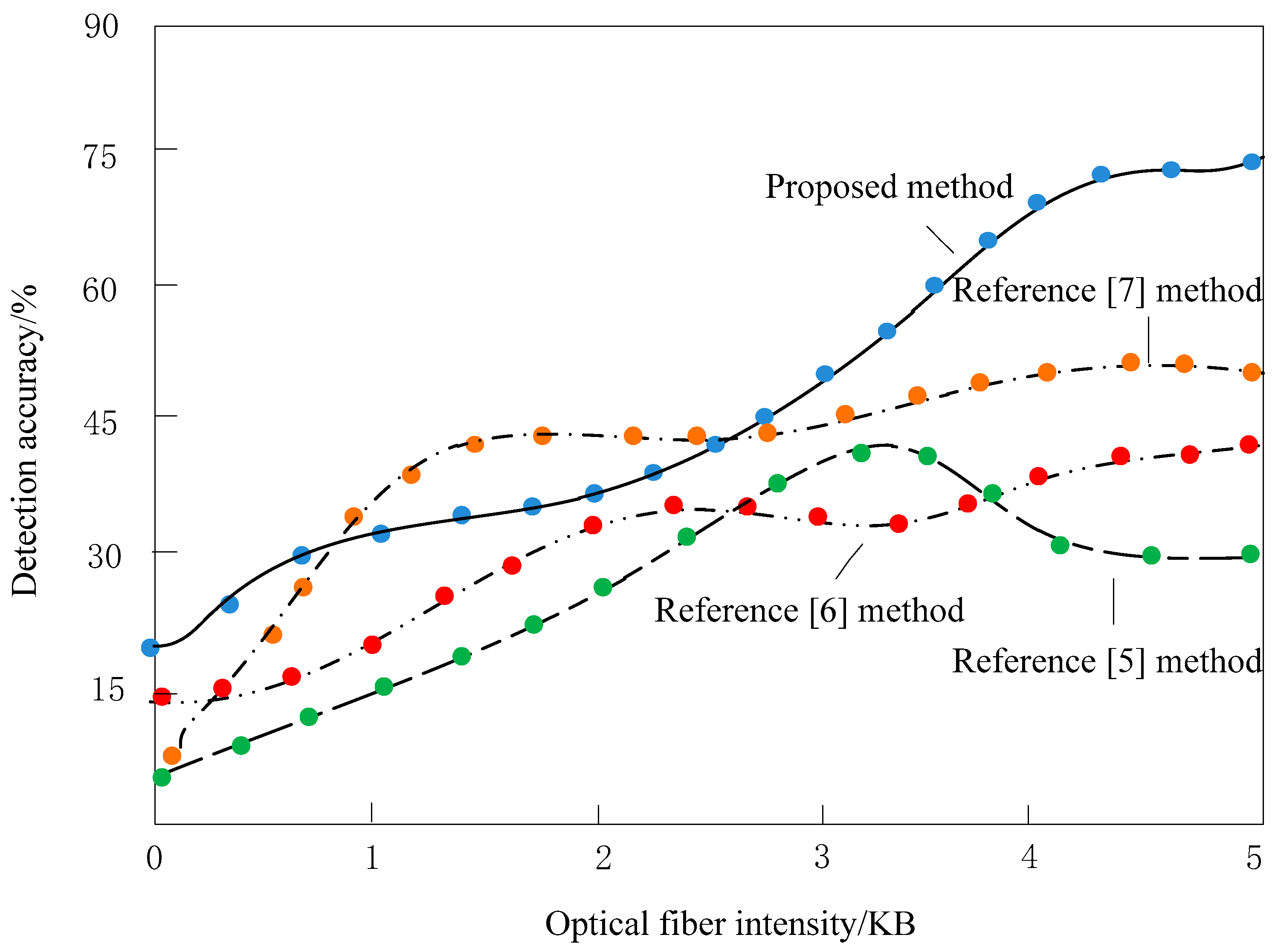
3.4. Comparison of Independent Detection Accuracy of Traffic Flow Parameters under Light Interference
3.5. Analysis Results of Denoising Performance of Different Methods
4. Discussion
- (1)
- The information of abnormal changes of traffic conditions of expressway in real-time was collected; the information was processed scientifically in time; we released it by the variable message sign and roadside broadcast and reported the road conditions to drivers;
- (2)
- We provided the road users with the best driving route and running speed in real-time so as to realize the dynamic balance of traffic flow on the road network through the variable speed limit sign, variable message sign, and ramp control equipment;
- (3)
- We sent emergency information and relevant instructions to the rescue departments, such as hospitals and public security, and organizations, such as the service area and maintenance work area;
- (4)
- The information monitoring of mechanical and electrical equipment included the display and control of equipment operation status, the detection and response between routes, the link and transmission delay detection, the configuration parameter tracking, and the network management data test.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Miller, A.B.; Miller, B.M. On AUV Navigation Based on Acoustic Sensing of the Seabed Profile. J. Commun. Technol. Electron. 2018, 63, 1502–1505. [Google Scholar] [CrossRef]
- Wang, K.; Jin, R.H.; Geng, J.P. Design of a Broadband Millimeter-Wave Circularly Polarized Microstrip Array Antenna. J. China Acad. Electron. Inf. Technol. 2017, 12, 181–186. [Google Scholar]
- Zhao, H.; Liu, H.; Leung, Y.W. Self-Adaptive Collective Motion of Swarm Robots. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1533–1545. [Google Scholar] [CrossRef]
- Yang, J.B.; Zhang, J.Y.; Song, P.Y. Multi-objective Optimization of Energy Management Strategy for A Tramway with Onboard Energy Storage System. J. Power Supply 2017, 15, 137–143. [Google Scholar]
- Shang, M.J.; Hu, X.; Zhou, J.E. An Algorithm for Detecting Outlier and Change Point of Traffic Flow Based on Improved Recursive Wavelet Transform. J. Highw. Transp. Res. Dev. 2019, 36, 133–143. [Google Scholar]
- Yin, S. Distribution of Stray Current in Urban Rail Transit Depot and the Monitoring System Design. Urban Mass. Transit. 2018, 21, 62–65. [Google Scholar]
- Zhao, W.T.; Wan, X.L.; Bai, G.W. Urban Traffic Flow Prediction and Vehicle Scheduling Optimization. J. Chin. Comput. Syst. 2019, 40, 1579–1584. [Google Scholar]
- Zhao, Y.; Li, H.Y. Development and Design of Intelligent Transportation System Based on Internet of Things. Autom. Instrum. 2017, 102, 70–72. [Google Scholar]
- Wang, Y.; Cao, L.; Hu, P.; Li, B.; Li, Y. Model establishment and performance evaluation of a modified regenerative system for a 660 MW supercritical unit running at the IPT-setting mode. Energy 2019, 179, 890–915. [Google Scholar] [CrossRef]
- Zhang, X.; Ma, Y.; Gao, Y. Autonomous Compressive-Sensing-Augmented Spectrum Sensing. IEEE Trans. Veh. Technol. 2018, 67, 6970–6980. [Google Scholar] [CrossRef]
- Li, J.; Zhang, L.; Feng, X.; Jia, K.; Kong, F. Feature extraction and area identification of wireless channel in mobile communication. J. Internet Technol. 2019, 20, 544–553. [Google Scholar]
- Yang, A.; Li, S.; Ren, C.; Liu, H.; Han, Y.; Liu, L. Situational awareness system in the smart campus. IEEE Access 2018, 6, 63976–63986. [Google Scholar] [CrossRef]
- Zhang, H. Digital Image Watermarking Algorithm Based on Compressive Sensing and Discrete Cosine Transform. J. Jilin Univ. 2017, 55, 1504–1510. [Google Scholar]
- Zhao, X.J.; Shu, Q.; Huang, H.G. Simulation of Freeway Traffic Flow Forecasting Model. Comput. Simul. 2017, 34, 169–173. [Google Scholar]
- Jadidi, M.G.; Miro, J.V.; Dissanayake, G. Gaussian processes autonomous mapping and exploration for range-sensing mobile robots. Auton. Robot. 2018, 42, 273–290. [Google Scholar]
- Kong, L.; Ye, L.; Fan, W. Autonomous Relay for Millimeter-Wave Wireless Communications. IEEE J. Sel. Areas Commun. 2017, 35, 2127–2136. [Google Scholar] [CrossRef]
- Brzeziński, D.W. Review of numerical methods for NumILPT with computational accuracy assessment for fractional calculus. Appl. Math. Nonlinear Sci. 2018, 3, 487–502. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Feng, J.; Bo, G. When Mobile Crowd Sensing Meets UAV: Energy-Efficient Task Assignment and Route Planning. IEEE Trans. Commun. 2018, 66, 5526–5538. [Google Scholar] [CrossRef]
- Guerreiro, B.J.; Silvestre, C.; Cunha, R. LiDAR-Based Control of Autonomous Rotorcraft for the Inspection of Pierlike Structures. IEEE Trans. Control Syst. Technol. 2018, 26, 1430–1438. [Google Scholar] [CrossRef]
- Attia, G.F.; Abdelaziz, A.M.; Hassan, I.N. Video Observation of Perseids meteor shower 2016 from Egypt. Appl. Math. Nonlinear Sci. 2017, 2, 151–156. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Times | Paper Method | Reference [5] Method | Reference [6] Method |
|---|---|---|---|
| 1 | 0.9868 | 0.9158 | 0.8578 |
| 2 | 0.9877 | 0.9154 | 0.8658 |
| 3 | 0.9888 | 0.9099 | 0.8647 |
| 4 | 0.9865 | 0.9028 | 0.8824 |
| 5 | 0.9868 | 0.8999 | 0.8457 |
| 6 | 0.9876 | 0.9011 | 0.8459 |
| Mean value | 0.9874 | 0.9075 | 0.8604 |
| Number of Experiments | Experience Group | Control Group | p Value |
|---|---|---|---|
| x2 Value | t Value | ||
| 20 | 1.68 | 0.01 | 0.04 |
| 40 | 2.15 | 0.47 | 0.01 |
| 60 | 0.75 | 0.24 | 0.03 |
| 80 | 6.07 | 0.17 | 0.04 |
| 100 | 4.24 | 0.14 | 0.04 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Ye, J. Autonomous Detection for Traffic Flow Parameters of a Vehicle-Mounted Sensing Device Based on Symmetrical Difference. Symmetry 2020, 12, 72. https://doi.org/10.3390/sym12010072
Huang J, Ye J. Autonomous Detection for Traffic Flow Parameters of a Vehicle-Mounted Sensing Device Based on Symmetrical Difference. Symmetry. 2020; 12(1):72. https://doi.org/10.3390/sym12010072
Chicago/Turabian StyleHuang, Jihai, and Jiansen Ye. 2020. "Autonomous Detection for Traffic Flow Parameters of a Vehicle-Mounted Sensing Device Based on Symmetrical Difference" Symmetry 12, no. 1: 72. https://doi.org/10.3390/sym12010072
APA StyleHuang, J., & Ye, J. (2020). Autonomous Detection for Traffic Flow Parameters of a Vehicle-Mounted Sensing Device Based on Symmetrical Difference. Symmetry, 12(1), 72. https://doi.org/10.3390/sym12010072