Modified Evolutionary Algorithm and Chaotic Search for Bilevel Programming Problems

Abstract
:1. Introduction
2. Bi-Level Programming Problems
3. Proposed Algorithm (CGA-BS)
3.1. Basic Concepts of Genetic Algorithm
3.2. Chaos Theory for Optimization Problems
3.3. Modified Genetic Algorithm and Chaotic Search for BLPP (CGA-BS)
3.3.1. Genetic Algorithm Based on BST
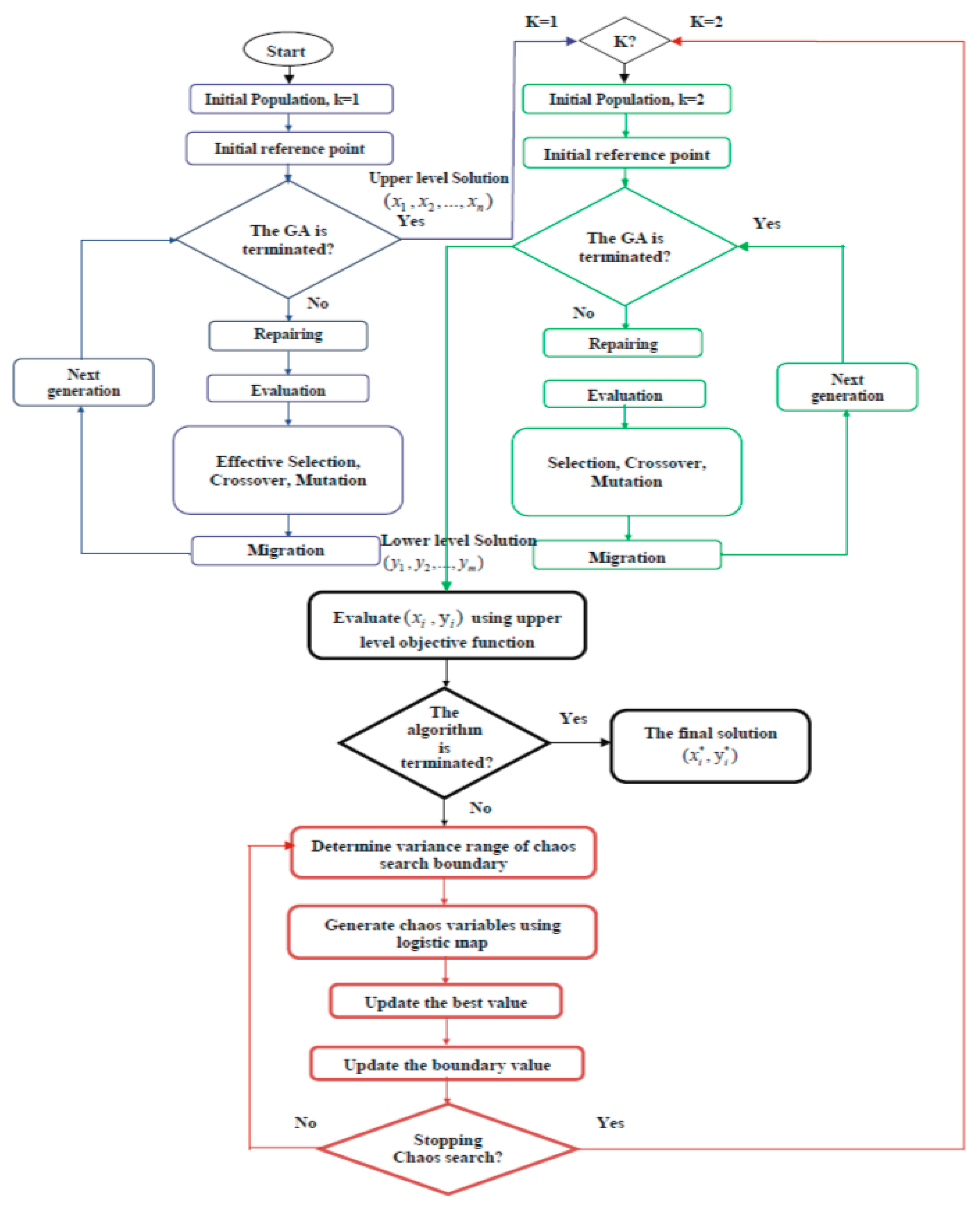
- Constrains handling: before starting the algorithm, constraints of the lower level problem is added to the constraints of the upper-level problem. The feasible solutions for the upper-level problem must be feasible and optimal solutions for the lower level problem. Therefore, constrains of both levels are considered as upper level constrains to guarantee the feasibility of solutions.
- Initial population: variables are randomly initialized within the search space bounds of upper-level bounds and lower-level bounds [50].
- Reference point: the repairing process needs one feasible point considered as a reference point to be entered and the algorithm procedure is completed.
- Repairing process: for constrained problems, some generated solutions don’t satisfy constraints and need to be repaired. The repairing process transforms the infeasible solutions to be feasible solutions [51].
- Evaluation: both upper-level objective function and lower-level objective function are used for evaluation of individuals and for determining the fitness of each solution to both upper-level problem and lower-level problem.
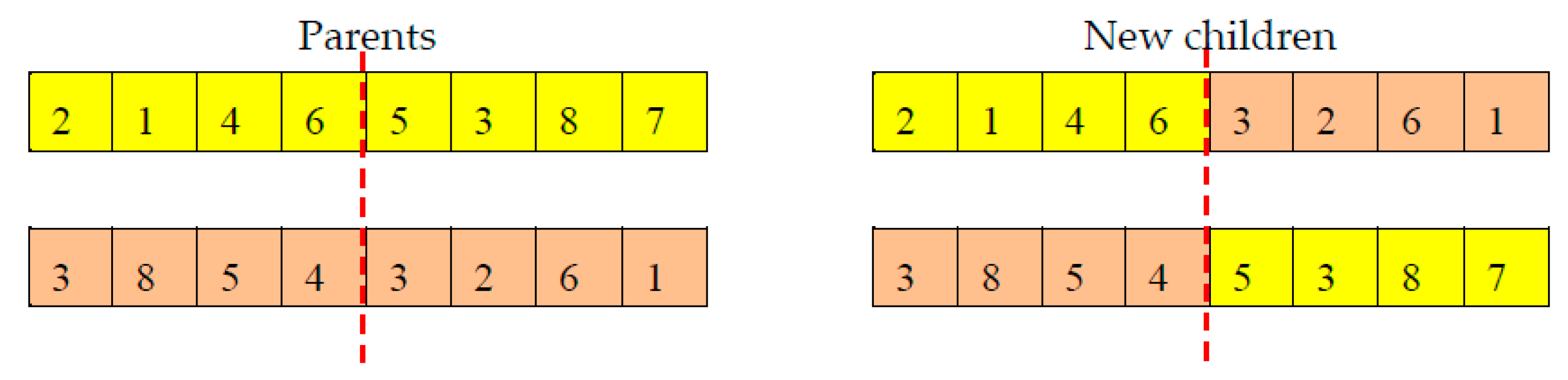
- Producing a new population: new selection technique, crossover operator and mutation operator have applied to produce the new population.
- 7.
- 8.
- GA termination: GA is terminated at the maximum number of generations or when population convergence occurs. If the termination condition doesn’t satisfy, return to 6.
3.3.2. Chaotic Local Search
- Define a range of the upper-level variables for chaotic local search.
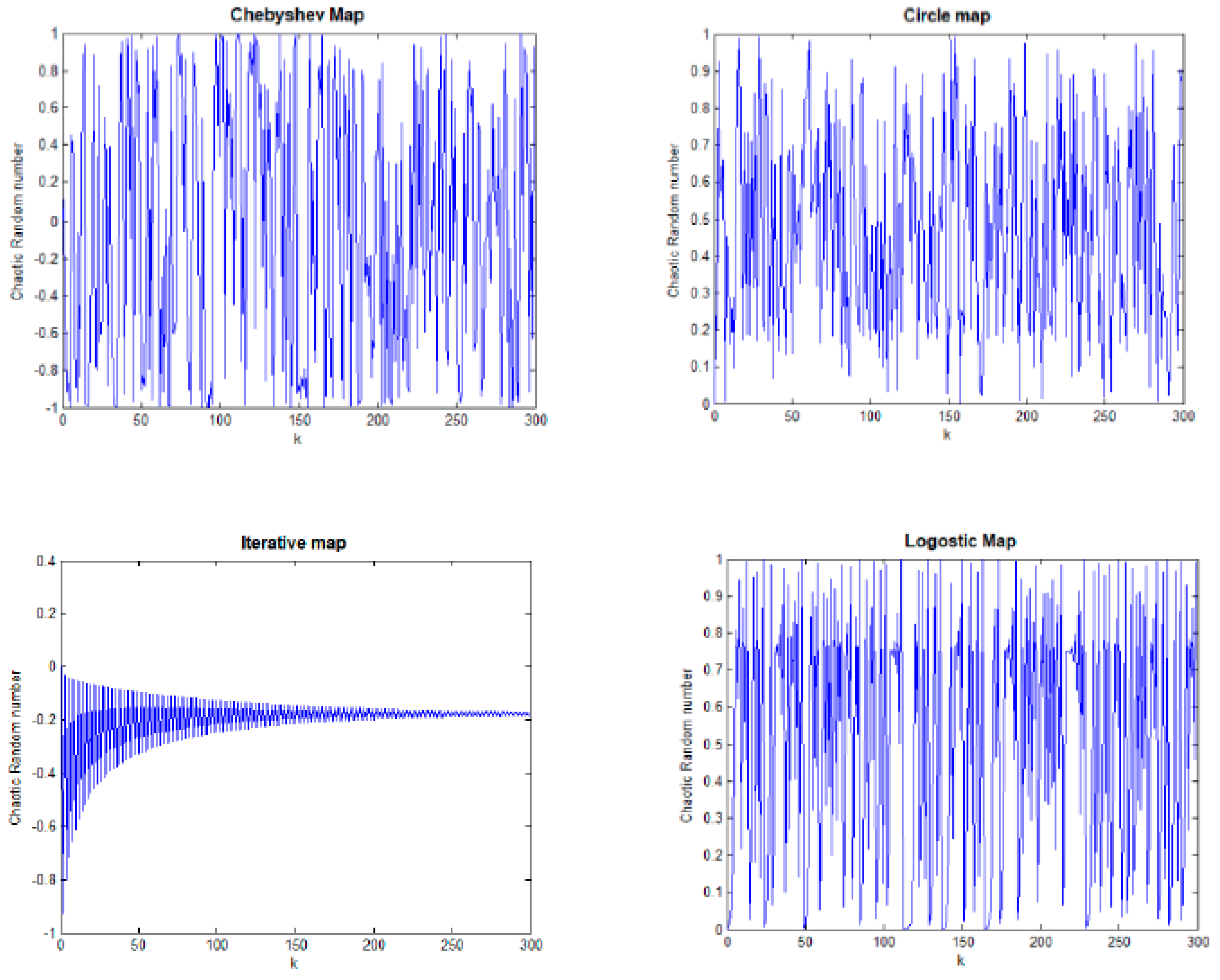
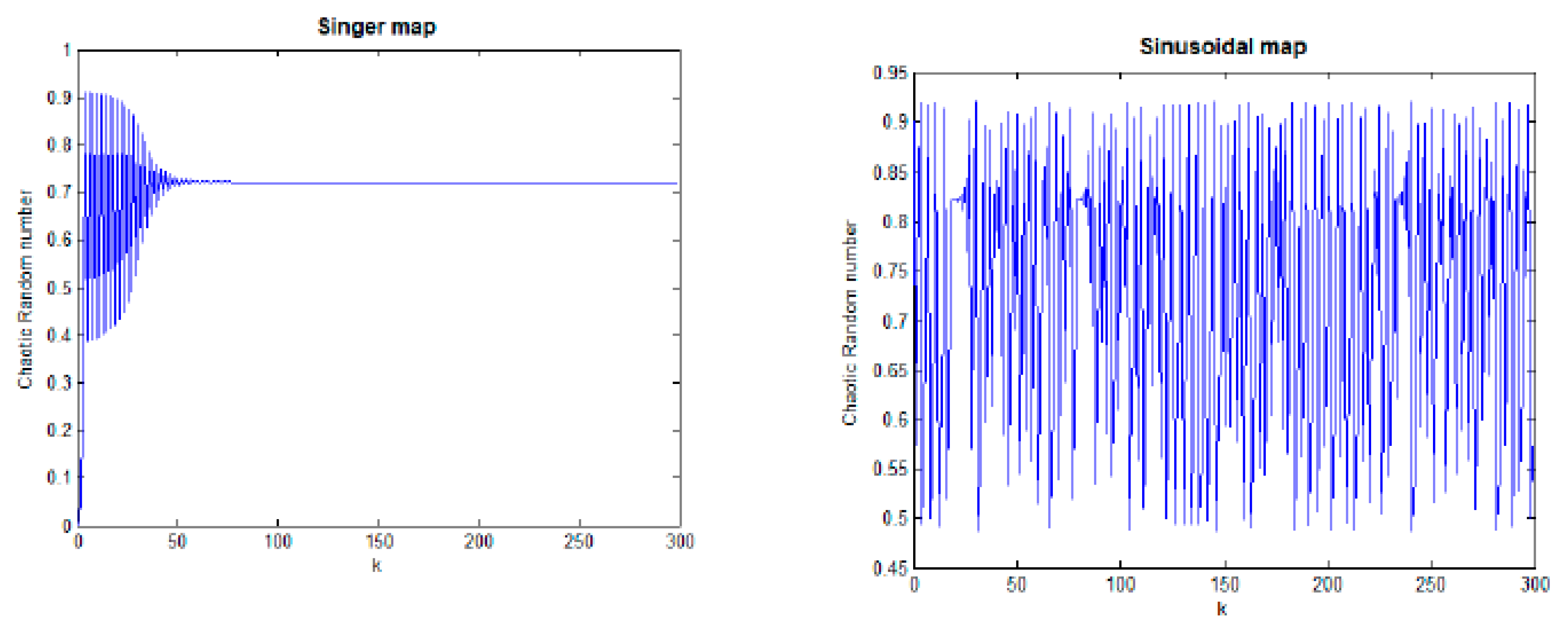
- Produce chaotic numbers using the logistic map: El-Shorbagy et al. in [46] presented a comparison between different chaotic maps for general nonlinear optimization problems and result that logistic map gives better performance than other chaotic maps and increase the solution quality rather than other chaotic maps. Therefore, in the proposed algorithm, we choose to apply the logistic map
- Generate the chaotic variables into the determined range.
- Find the best value: The produced chaotic variables are evaluated according to upper-level objective-function. The chaotic variables obtained best objective-function values are the best value.
- Update the local search boundary value for the best-obtained value.
- Stopping chaos search: chaotic local search is stopped at the specified iterations and put out the best solution as a local search solution.
3.3.3. Algorithm Termination
| Algorithm 1 Modified Genetic algorithm with chaotic search for BLPP (CGA-BS) |
| 1: Modified Genetic algorithm for upper level problem 2: Begin 3: Generate an initial population with size ; 4: Check feasibility and repair out unfeasible individuals of the population ; 5: While Evaluate according to upper level objective function; Select from using selection operator; Evaluate according to lower level objective function; Select from using selection operator; Apply crossover operator with and mutation operators with on and produce children population ; |
| Evaluate the fitness of the children ; Select from using selection operator; Apply crossover operator with and mutation operators with on and produce children population ; Evaluate the fitness of the children ; Keep the best from to form Archive ; 6: End while 7: Return to the individual from with best fitness values and archive 8: Chaotic local search around modified genetic algorithm solution 9: Begin 10: While: Define range of chaotic local search Generate using different logistic ma If then and archive Else if continue, End if If termination criteria satisfied, Break End if 11: End while 12: Solve lower level problem using genetic algorithm for 13: Begin 14: Generate an initial population with size ; 15: Check feasibility and repair out unfeasible individuals of the population ; 16: While Evaluate according to lower level objective function; Select from using selection operator; Apply crossover operator with and mutation operators with on and produce children population |
| Evaluate the fitness of the children ; Keep the best from to form ; Archive ; 17: End while 18: Return to the individual from with best fitness values; 19: Evaluate the fitness of 20: Repeat from step 13 to step 18 for 21: Evaluate the fitness of 22: Return best evaluation in step 20 and 22 as algorithm solution |
4. Numerical Experiments
- GA generation: 200–1000
- Generation gap: 0.9
- Selection operator: Stochastic universal sampling
- Crossover operator: Single point
- Mutation operator: Real-value
- Crossover rate: 0.9
- Mutation rate: 0.07
- Number of Chaotic iterations: 10,000
- Chaotic rang: 10−3
4.1. Test Problems
4.2. Results Analyses
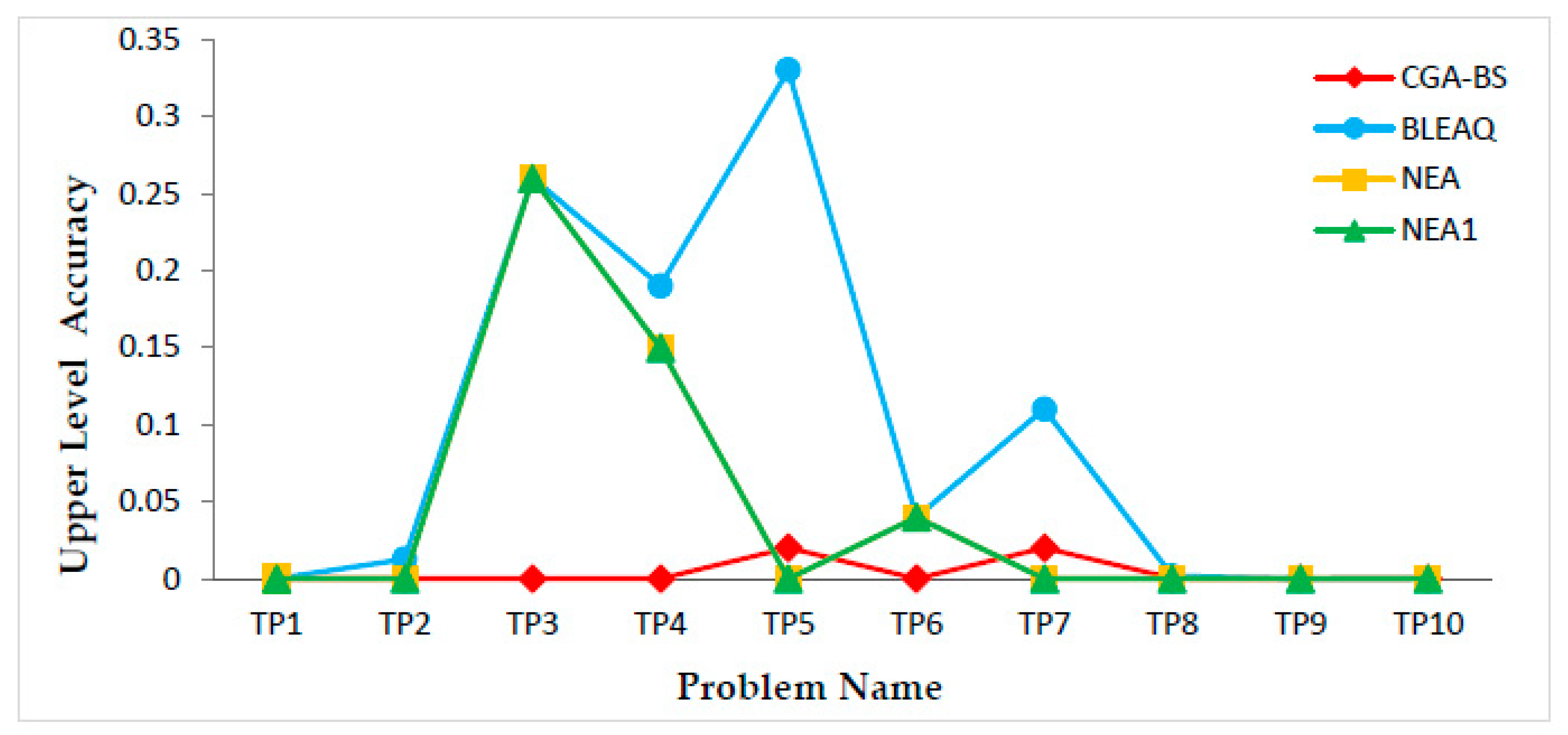
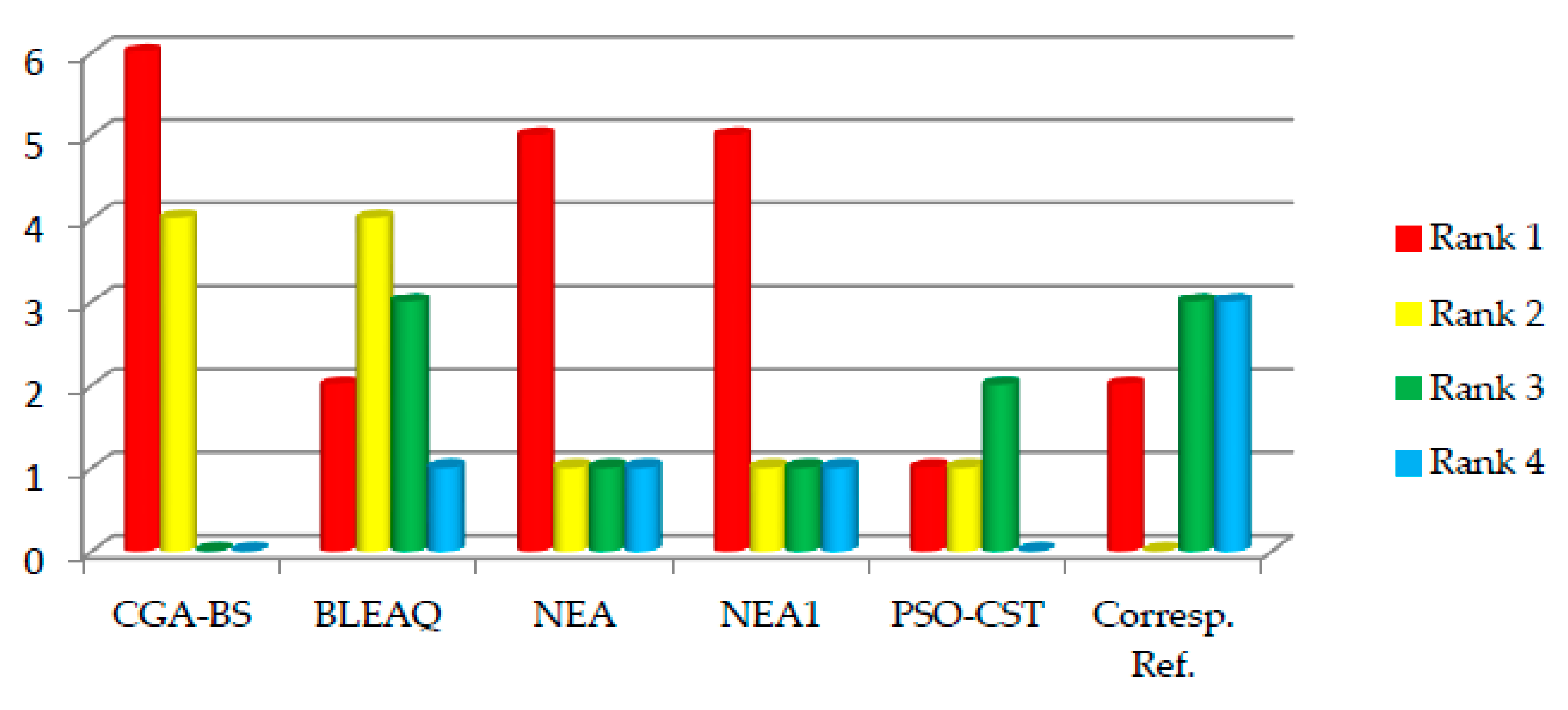
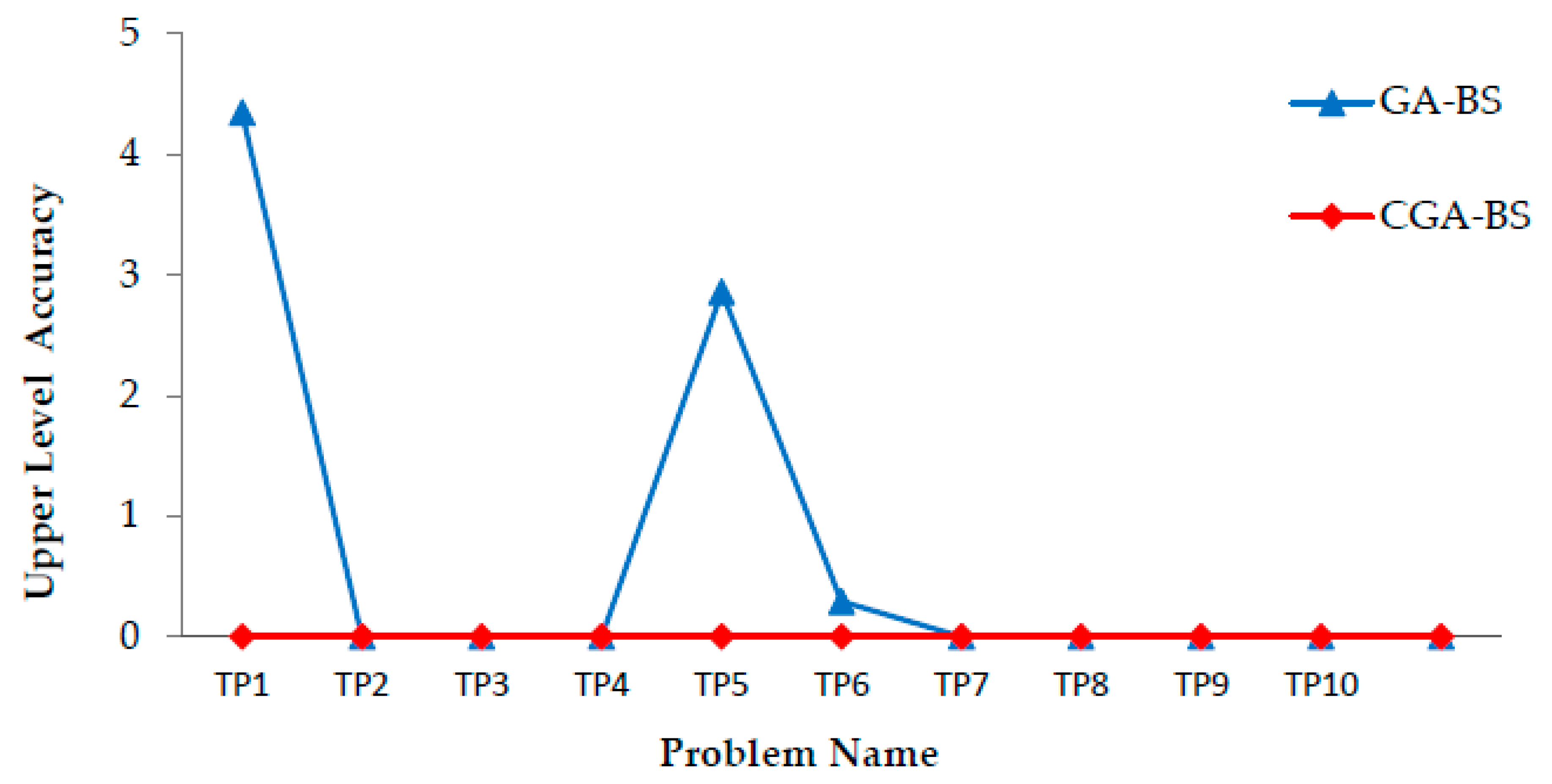
4.2.1. TP Test Set Results Analyses
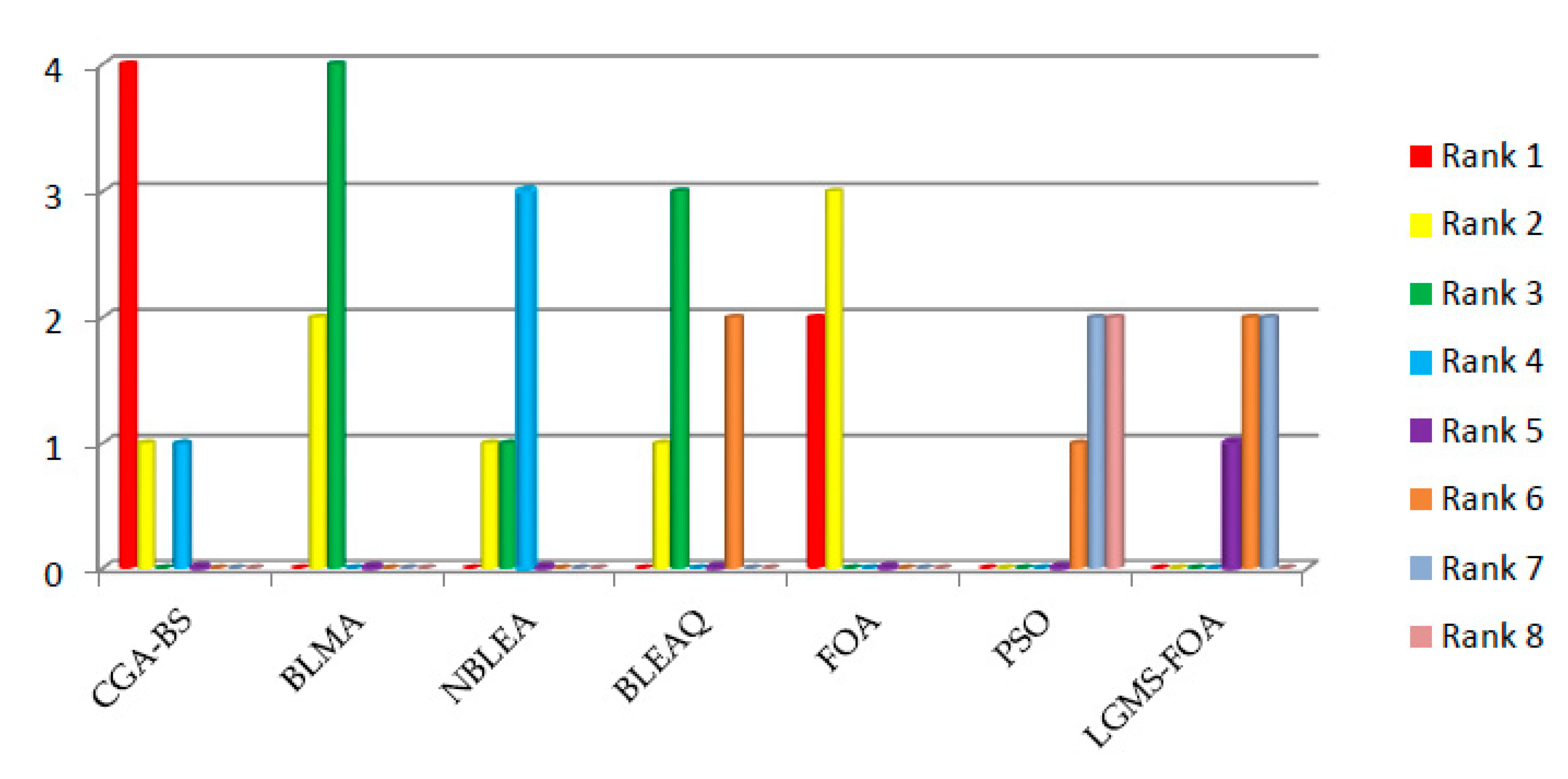
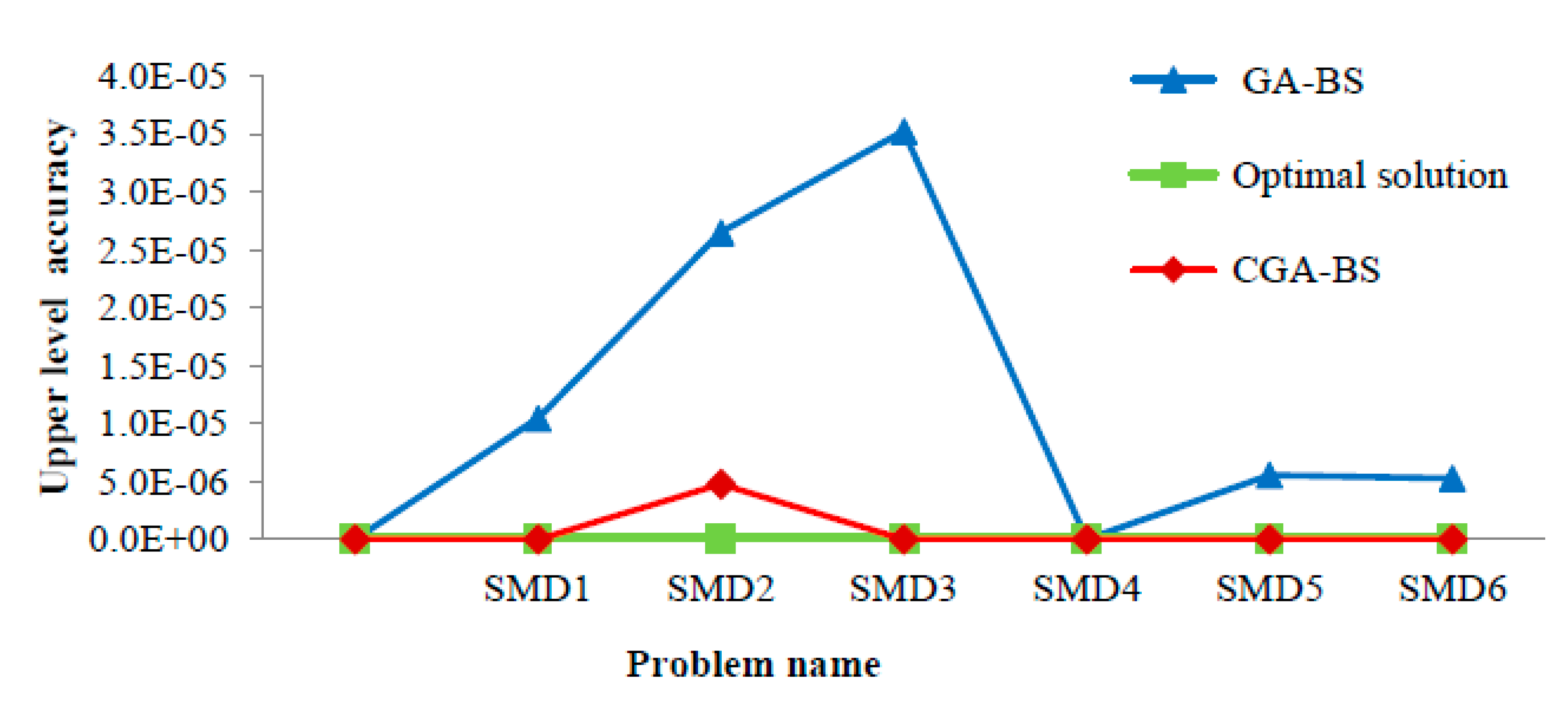
4.2.2. SMD Test Set Results Analyses
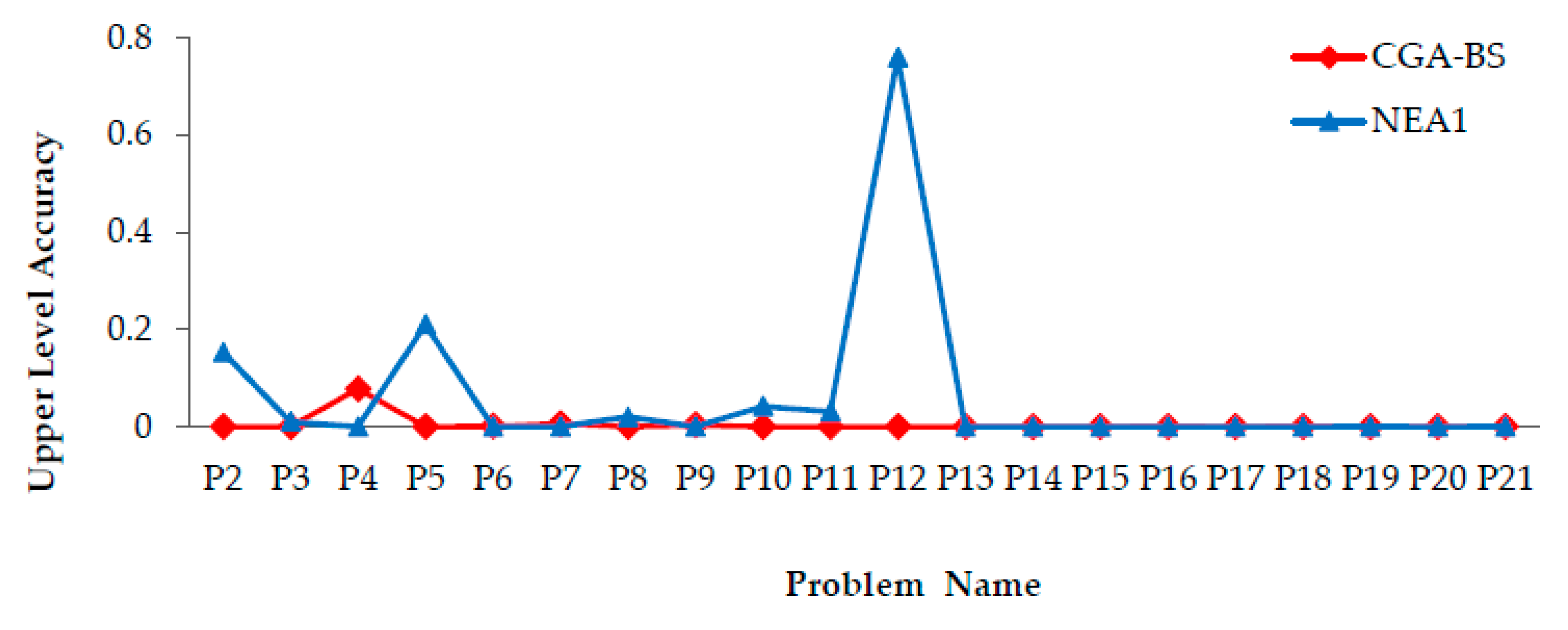
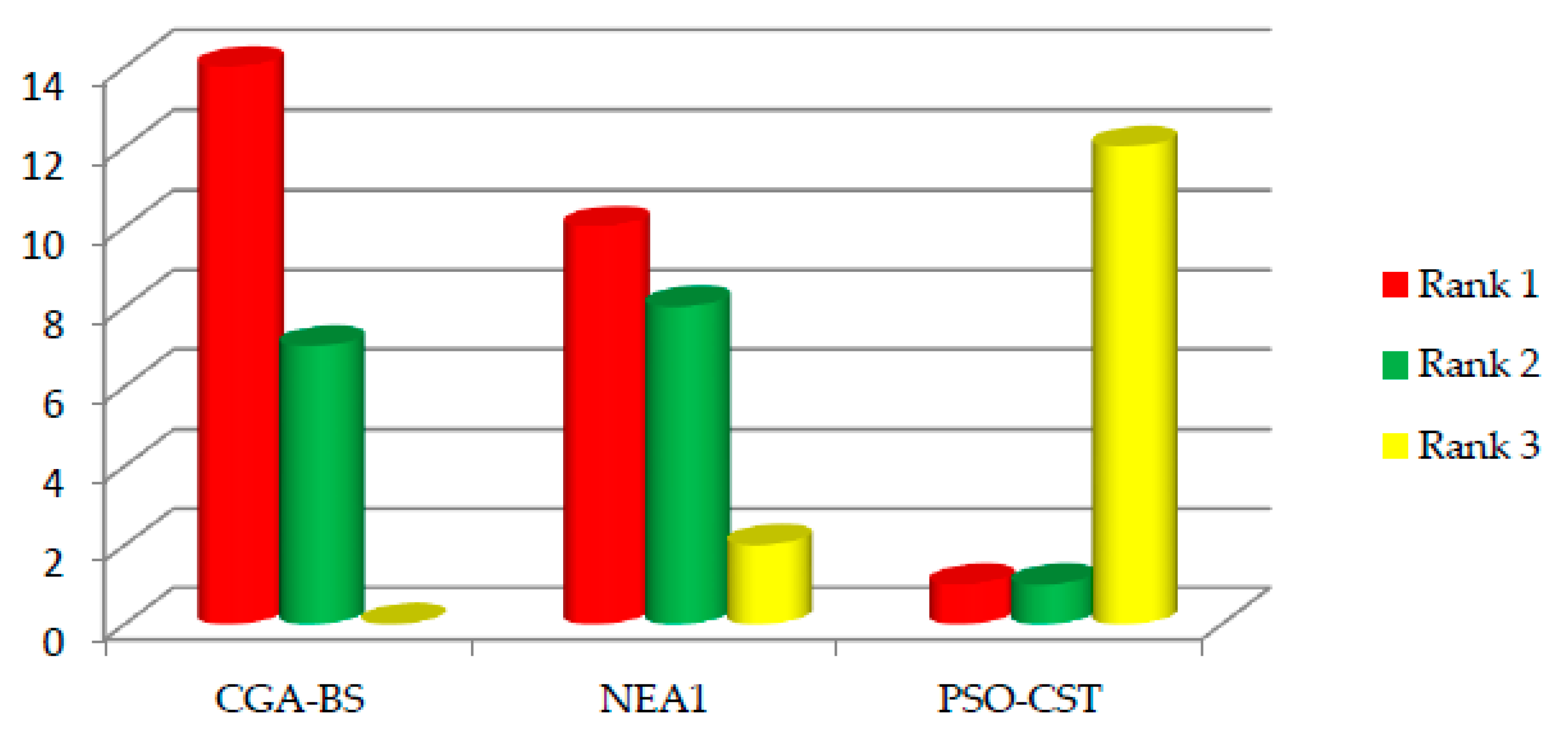
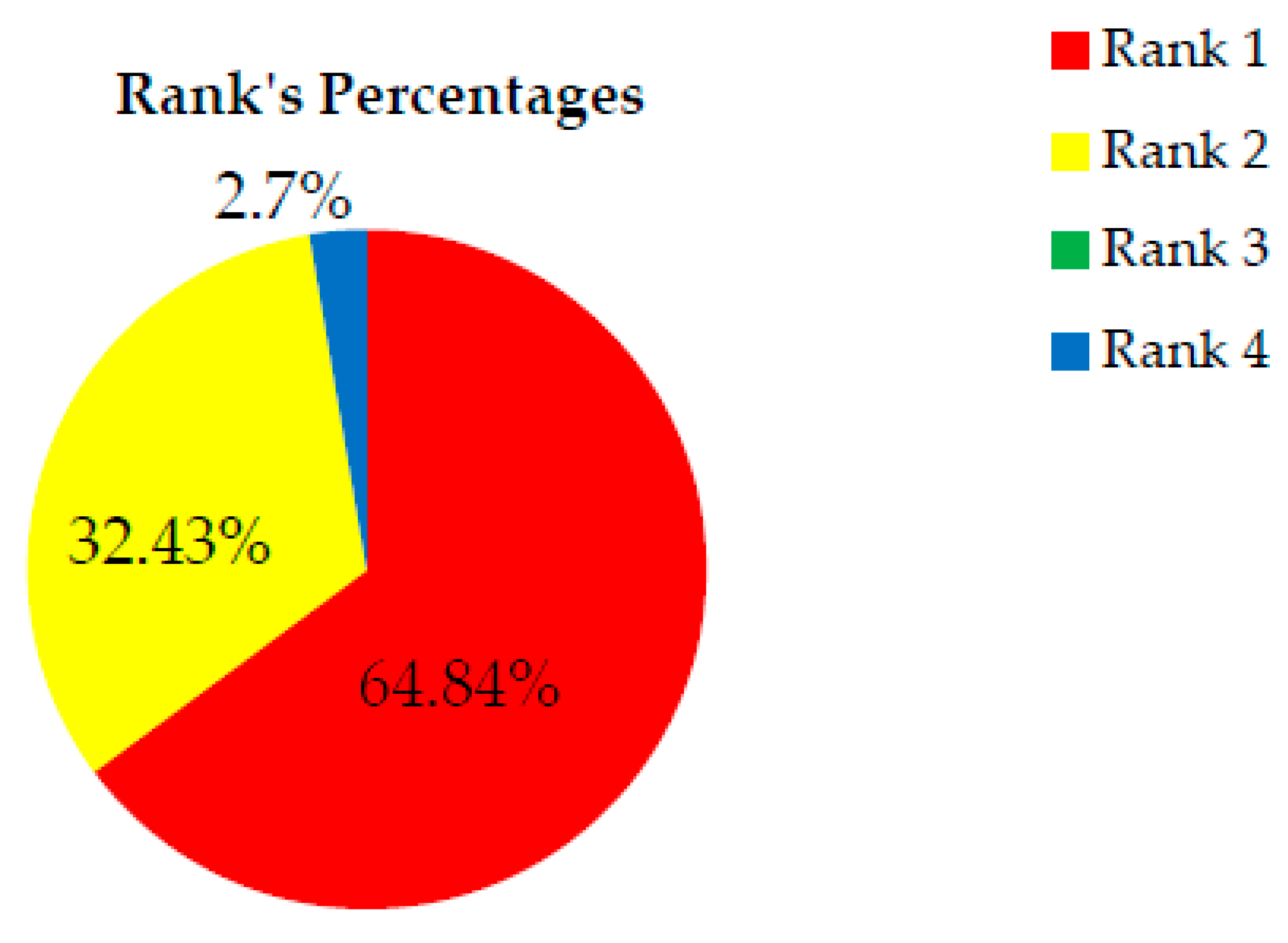
4.2.3. P1–P24 Test Set Results Analyses
4.2.4. Algorithm Performance Analyses with Bilevel Selection Technique
4.2.5. Algorithm Performance Analyses with Chaos Search
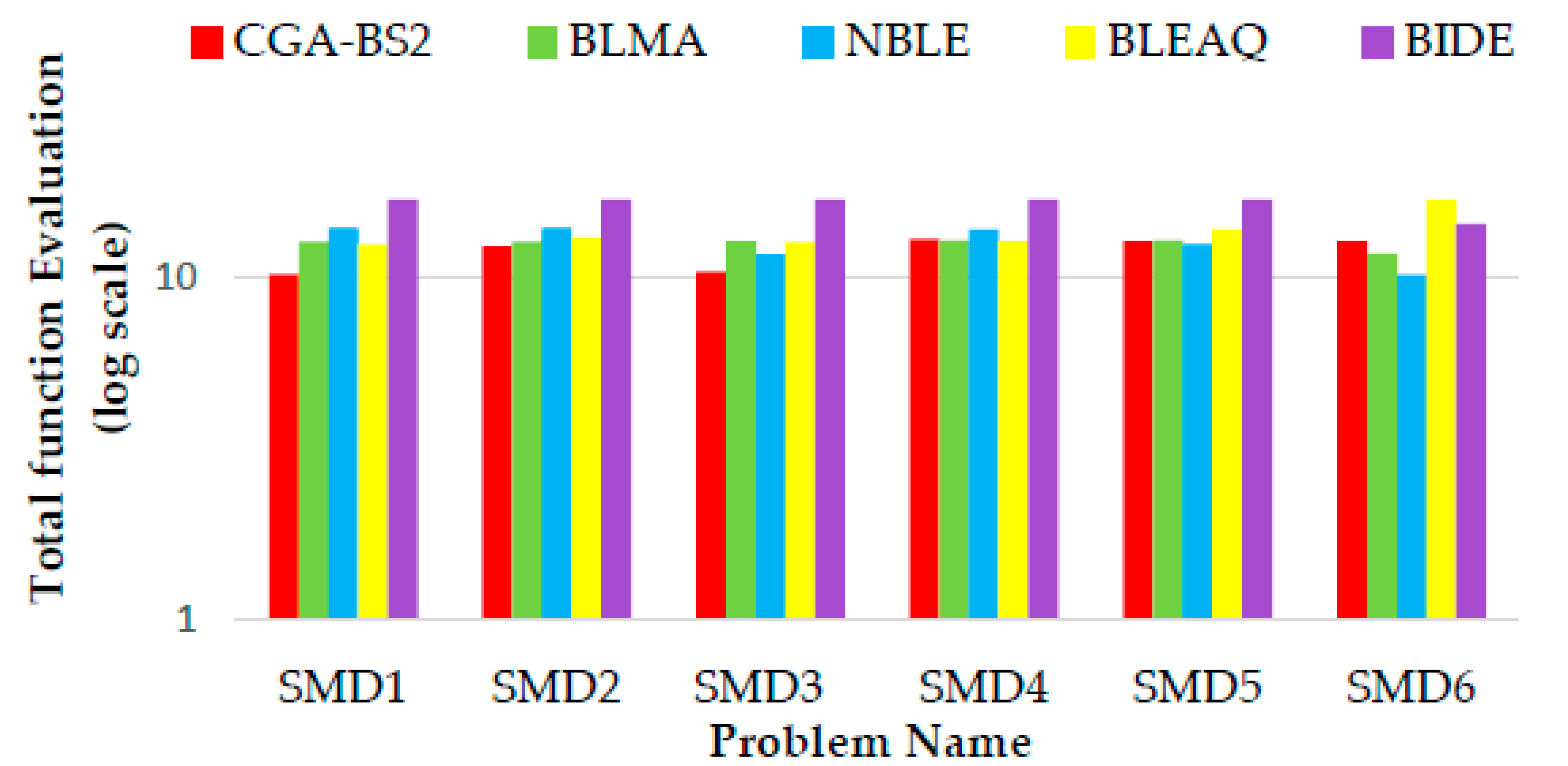
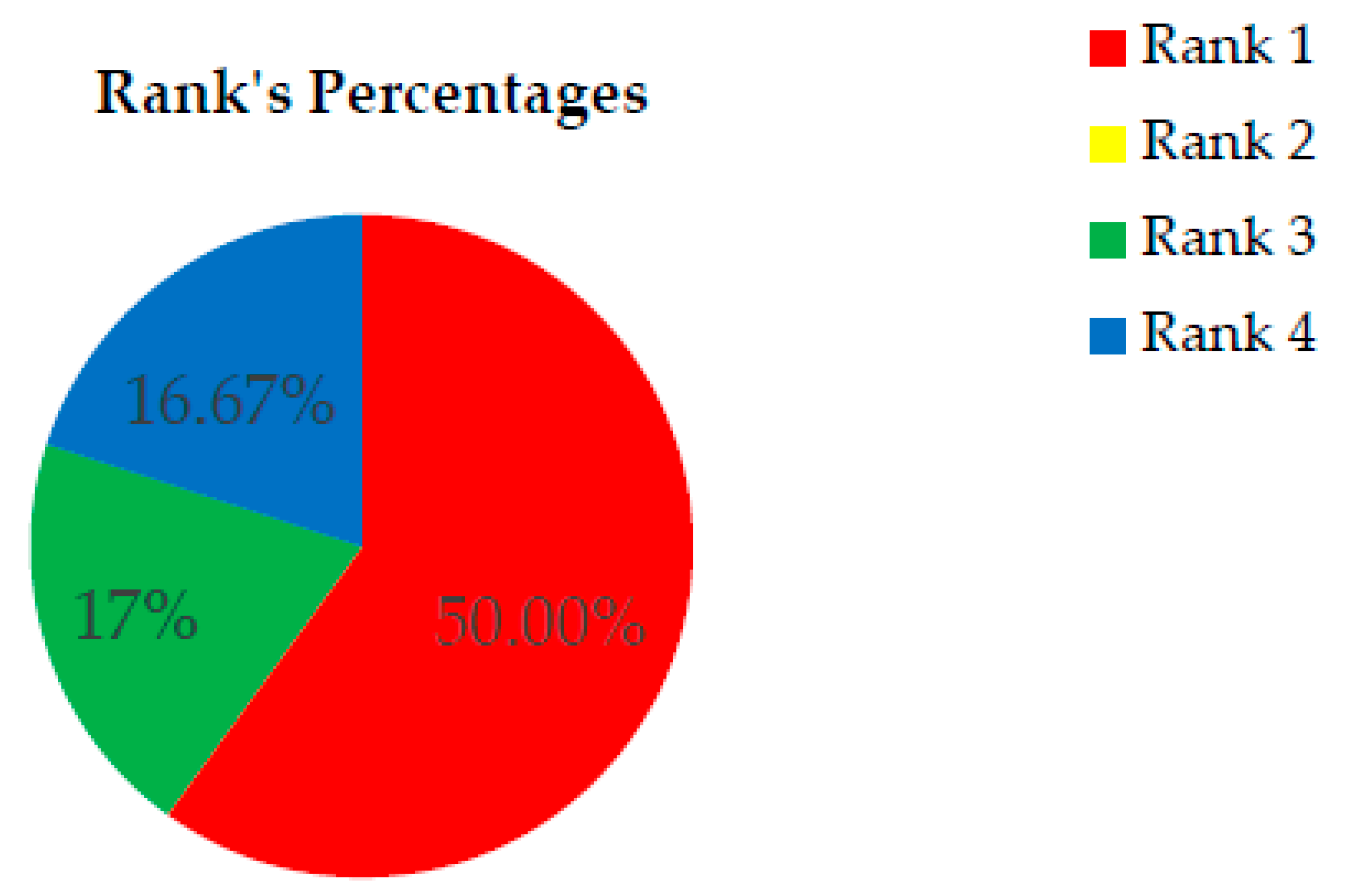
4.2.6. Computational Expense
5. Conclusions
- (a)
- Adapting CGA-BS to solve multi-level programming problems
- (b)
- Updating CGA-BS to solve the multi-objective multi-level programming problems.
Author Contributions
Funding
Conflicts of Interest
Abbreviation
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Problem Formulation (n, m) | Problem Formulation (n, m) |
|---|---|
| P1 | P2 |
| P3 | P4 |
| P5 | P6 |
| P7 | P8 |
| P9 | P10 |
| P11 | P12 |
| P13 | P14 |
| P15 | P16 |
| P17 | P18 |
| P19 | P20 |
| P21 | P22 |
| P23 | P24 |
Appendix B
| Problem | Rank According to Upper Level | |||||
|---|---|---|---|---|---|---|
| CGA-BS | BLEAQ [27] | NEA [41] | NEA1 [56] | PSO-CST [36] | Cor. Ref. [36] | |
| TP1 | Rank1 | Rank1 | Rank1 | Rank1 | - | Rank1 |
| TP2 | Rank1 | Rank2 | Rank1 | Rank1 | - | Rank3 |
| TP3 | Rank1 | Rank2 | Rank4 | Rank4 | Rank3 | Rank4 |
| TP4 | Rank1 | Rank4 | Rank3 | Rank3 | Rank2 | Rank3 |
| TP5 | Rank2 | Rank3 | Rank1 | Rank1 | - | Rank4 |
| TP6 | Rank1 | Rank2 | Rank2 | Rank2 | Rank3 | Rank4 |
| TP7 | Rank2 | Rank3 | Rank1 | Rank1 | Rank1 | Rank1 |
| TP8 | Rank2 | Rank3 | Rank1 | Rank1 | - | Rank3 |
| TP9 | Rank1 | Rank2 | - | - | - | - |
| TP10 | Rank2 | Rank1 | - | - | - | - |
| Problem | Rank According to Upper Level | |||||||
|---|---|---|---|---|---|---|---|---|
| CGA-BS | BLMA [57] | NBLEA [57] | BLEAQ [57] | BIDE [57] | FOA [58] | PSO [58] | LGMS-FOA [58] | |
| SMD1 | Rank 1 | Rank 3 | Rank 5 | Rank 3 | Rank 4 | Rank 2 | Rank7 | Rank 6 |
| SMD2 | Rank 4 | Rank2 | Rank 5 | Rank 6 | Rank 3 | Rank 1 | Rank 8 | Rank7 |
| SMD3 | Rank 1 | Rank 3 | Rank 4 | Rank 6 | Rank 5 | Rank 2 | Rank 8 | Rank 7 |
| SMD4 | Rank 2 | Rank 3 | Rank 5 | Rank 3 | Rank 4 | Rank 1 | Rank 7 | Rank 6 |
| SMD5 | Rank 1 | Rank 3 | Rank 3 | Rank 3 | Rank 4 | Rank 2 | Rank 6 | Rank 5 |
| SMD6 | Rank 1 | Rank 2 | Rank 2 | Rank 2 | Rank 3 | - | - | - |
| Problem | Rank According to Upper Level | ||
|---|---|---|---|
| CGA-BS | NEA1 [56] | PSO-CST [36] | |
| P1 | Rank1 | Rank2 | Rank3 |
| P2 | Rank1 | Rank2 | Rank3 |
| P3 | Rank1 | Rank2 | - |
| P4 | Rank2 | Rank1 | - |
| P5 | Rank1 | Rank2 | - |
| P6 | Rank2 | Rank1 | - |
| P7 | Rank2 | Rank1 | - |
| P8 | Rank1 | Rank2 | Rank3 |
| P9 | Rank2 | Rank1 | Rank3 |
| P10 | Rank1 | Rank2 | Rank3 |
| P11 | Rank1 | Rank3 | Rank2 |
| P12 | Rank1 | Rank2 | - |
| P13 | Rank1 | Rank1 | - |
| P14 | Rank1 | Rank1 | Rank2 |
| P15 | Rank1 | Rank1 | Rank2 |
| P16 | Rank2 | Rank1 | Rank3 |
| P17 | Rank2 | Rank3 | Rank1 |
| P18 | Rank2 | Rank1 | Rank3 |
| P19 | Rank1 | Rank2 | Rank3 |
| P20 | Rank1 | Rank2 | Rank3 |
| P21 | Rank1 | Rank2 | Rank3 |
| Problem | Statistics of Ranks | |||
|---|---|---|---|---|
| Rank1 | Rank2 | Rank3 | Rank4 | |
| TP1 | 1 | 0 | 0 | 0 |
| TP2 | 1 | 0 | 0 | 0 |
| TP3 | 1 | 0 | 0 | 0 |
| TP4 | 1 | 0 | 0 | 0 |
| TP5 | 0 | 1 | 0 | 0 |
| TP6 | 1 | 0 | 0 | 0 |
| TP7 | 0 | 1 | 0 | 0 |
| TP8 | 0 | 1 | 0 | 0 |
| TP9 | 1 | 0 | 0 | 0 |
| TP10 | 0 | 1 | 0 | 0 |
| SMD1 | 1 | 0 | 0 | 0 |
| SMD2 | 0 | 0 | 0 | 1 |
| SMD3 | 1 | 0 | 0 | 0 |
| SMD4 | 0 | 1 | 0 | 0 |
| SMD5 | 1 | 0 | 0 | 0 |
| SMD6 | 1 | 0 | 0 | 0 |
| P1 | 1 | 0 | 0 | 0 |
| P2 | 1 | 0 | 0 | 0 |
| P3 | 1 | 0 | 0 | 0 |
| P4 | 0 | 1 | 0 | 0 |
| P5 | 1 | 0 | 0 | 0 |
| P6 | 0 | 1 | 0 | 0 |
| P7 | 0 | 1 | 0 | 0 |
| P8 | 1 | 0 | 0 | 0 |
| P9 | 0 | 1 | 0 | 0 |
| P10 | 1 | 0 | 0 | 0 |
| P11 | 1 | 0 | 0 | 0 |
| P12 | 1 | 0 | 0 | 0 |
| P13 | 1 | 0 | 0 | 0 |
| P14 | 1 | 0 | 0 | 0 |
| P15 | 1 | 0 | 0 | 0 |
| P16 | 0 | 1 | 0 | 0 |
| P17 | 0 | 1 | 0 | 0 |
| P18 | 0 | 1 | 0 | 0 |
| P19 | 1 | 0 | 0 | 0 |
| P20 | 1 | 0 | 0 | 0 |
| P21 | 1 | 0 | 0 | 0 |
| Problem | Rank According to Total of Function Evaluations | ||||
|---|---|---|---|---|---|
| CGA-BS | BLMA [57] | NBLEA [57] | BLEAQ [57] | BIDE [57] | |
| SMD1 | Rank 1 | Rank 3 | Rank 4 | Rank 2 | Rank 5 |
| SMD2 | Rank 1 | Rank2 | Rank 4 | Rank 3 | Rank 5 |
| SMD3 | Rank 1 | Rank 3 | Rank 4 | Rank 2 | Rank 5 |
| SMD4 | Rank 3 | Rank 2 | Rank 4 | Rank 1 | Rank 5 |
| SMD5 | Rank 1 | Rank 2 | Rank 4 | Rank 3 | Rank 5 |
| SMD6 | Rank 4 | Rank 3 | Rank 2 | Rank 1 | Rank 5 |
References
- Kalashnikov, V.; Dempe, S.; Pérez-Valdés, A.; Kalashnykova, I.; Camacho-Vallejo, J. Bilevel programming and applications. Math. Probl. Eng. 2015, 2015, 1–16. [Google Scholar] [CrossRef]
- Ruusk, S.; Miettinen, K.; Wiecek, M. Connections between single-level and bilevel multiobjective optimization. J. Optimiz. Theory App. 2012, 153, 60–74. [Google Scholar] [CrossRef] [Green Version]
- Shuang, M. A nonlinear bi-level programming approach for product portfolio management. SpringerPlus 2016, 5, 1–18. [Google Scholar]
- Gaspar, I.; Benavente, J.; Bordagaray, M.; Alonso, B.; Moura, J.L.; Ibeas, Á. A bilevel mathematical programming model to optimize the design of cycle paths. Transp. Res. Procedia 2015, 10, 423–443. [Google Scholar] [CrossRef]
- Aihong, R.; Yuping, W.; Xingsi, X. A novel approach based on preference-based index for interval bilevel linear programming problem. J. Inequal. Appl. 2017, 2017, 1–16. [Google Scholar]
- Birla, R.; Agarwal, V.; Khan, I.; Mishra, V. An alternative approach for solving bilevel programming problems. Am. J. Oper. Res. 2017, 7, 239–247. [Google Scholar]
- Osman, M.; Emam, M.; Elsayed, M. Interactive approach for multi-level multi-objective fractional programming problems with fuzzy parameters. J. Basic Appl. Sci. 2018, 7, 139–149. [Google Scholar] [CrossRef]
- Dempe, S.B. Bilevel Optimization: Theory, Algorithms and Applications; Fakultät für Mathematik und Informatik: Freiberg, Germany, 2018. [Google Scholar]
- Borowska, B.B. Social Strategy of Particles in Optimization Problems; Springer: Cham, Switzerland, 2020; pp. 537–546. [Google Scholar]
- Zhan, Y.; Zheng, Q. A multistage decision-dependent stochastic bilevel programming approach for power generation investment expansion 525 planning. IISE Trans. 2018, 50, 720–734. [Google Scholar] [CrossRef]
- Migdalas, A.; Pardalos, M.; Värbrand, P. Multilevel Optimization: Algorithms and Applications; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Jie, L.; Jialin, H.; Yaoguang, H.; Guangquan, Z. Multilevel decision-making: A survey. Inf. Sci. 2016, 346, 463–487. [Google Scholar]
- Wang, G.; Wan, Z.; Wang, X.; Yibing, L. Genetic algorithm based on simplex method for solving linear-quadratic bilevel programming problem. Comput. Math. Appl. 2008, 56, 2550–2555. [Google Scholar] [CrossRef] [Green Version]
- El-Desoky, I.; El-Shorbagy, M.; Nasr, S.; Hendawy, Z.; Mousa, A. A Hybrid Genetic Algorithm for Job Shop Scheduling Problem. Int. J. Adv. Eng. Technol. Comput. Sci. 2016, 3, 6–17. [Google Scholar]
- Hosseini, E. Solving linear tri-level programming problem using heuristic method based on bi-section algorithm. Asian J. Sci. Res. 2017, 10, 227–235. [Google Scholar] [CrossRef]
- Dempe, S.; Kue, F. Solving discrete linear bilevel optimization problems using the optimal value reformulation. Glob. Optim. 2017, 68, 255–277. [Google Scholar] [CrossRef]
- Zhenyuan, L.; Zaisheng, L.; Zhipeng, Z.; Shen, Y.; Dong, J. Simulated annealing for a multi-level nurse rostering problem in hemodialysis service. Appl. Soft Comput. 2017, 64, 148–160. [Google Scholar]
- Jialin, H.; Guangquan, Z.; Yaoguang, H.; Jie, L. Solving tri-level programming problems using a particle swarm optimization algorithm. In Proceedings of the Conference on Industrial Electronics and Applications, Auckland, New Zealand, 15–17 June 2015. [Google Scholar]
- Lachhwani, K.; Dwivedi, A.; Goyal, D. Feasibility of lingo software for bi-Level programming problems (BLPPs): A study. In Proceedings of the Sixth International Conference on Soft Computing for Problem Solving, Patiala, India, 23–24 December 2016. [Google Scholar]
- Yabo, L.; Yongo, P. The improved ant colony optimization algorithm for mlp considering the advantage from relationship. Math. Probl. Eng. 2017, 2017, 1–11. [Google Scholar]
- Khan, S.; Baig, A. Ant colony optimization based hierarchical multi-label classification algorithm. Appl. Soft Comput. 2017, 55, 462–479. [Google Scholar] [CrossRef]
- Shiha, H.; Wen, U.; Lee, S.; Lan, K.; Hsiao, H. A neural network approach to multiobjective and multilevel programming problems. Comput. Math. Appl. 2004, 48, 95–108. [Google Scholar] [CrossRef] [Green Version]
- Sinha, A.; Malo, P.; Deb, K. A Review on bilevel optimization: From classical to evolutionary approaches and applications. IEEE Trans. Evolut. Comput. 2017, 22, 276–295. [Google Scholar] [CrossRef]
- Zhang, T.; Chen, Z.; June, L.; Xiong, L. The artificial neural networks based on scalarization method for a class of bilevel biobjective programming problem. Comput. Intell. Neurosci. 2017, 2017, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Bard, J.; Moore, J. A branch and bound algorithm for the bilevel programming problem. Siam J. Sci. Stat. Comp. 1990, 11, 281–292. [Google Scholar] [CrossRef]
- Sinha, A.; Malo, P.; Deb, K. An improved bilevel evolutionary algorithm based on quadratic approximations. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation, Beijing, China, 6–11 July 2014. [Google Scholar]
- Sinha, A.; Malo, P.; Deb, K. Evolutionary algorithm for bilevel optimization using approximations of the lower level optimal solution mapping. Eur. J. Oper. Res. 2016, 275, 395–411. [Google Scholar] [CrossRef]
- Sinha, A.; Lu, Z.; Deb, K.; Malo, P. Bilevel optimization based on iterative approximation of multiple mappings. J. Heuristics 2020, 26, 151–185. [Google Scholar] [CrossRef] [Green Version]
- Carrasqueira, P.; Alves, M.; Antunes, C. Bi-level particle swarm optimization and evolutionary algorithm approaches for residential demand response with different user profiles. Inf. Sci. 2017, 418, 405–420. [Google Scholar] [CrossRef] [Green Version]
- Lan, K.; Wen, U.; Shih, H.; Stanley Lee, E. A hybrid neural network approach to bilevel programming problems. Appl. Math. Lett. 2007, 20, 880–884. [Google Scholar] [CrossRef]
- Anter, A.; Ali, M. Feature selection strategy based on hybrid crow search optimization algorithm integrated with chaos theory and fuzzy c-means algorithm for medical diagnosis problems. Soft Comput. 2020, 24, 1565–1584. [Google Scholar] [CrossRef]
- Jampour, M. Chaotic genetic algorithm based on lorenz chaotic system for optimization problems. Intell. Syst. Appl. 2013, 5, 19–24. [Google Scholar]
- Liu, B.; Wang, L.; Jin, Y.; Tang, F.; Huang, D. Improved particle swarm optimization combined with chaos. Chaos Solitons Fract. 2005, 25, 1261–1271. [Google Scholar] [CrossRef]
- Xiang, T.; Liao, X.; Wong, K. An improved particle swarm optimization algorithm combined with piecewise linear chaotic map. Appl. Math. Comput. 2007, 190, 1637–1645. [Google Scholar] [CrossRef]
- Gue, S.; Wang, J.; Ma, X. Improved Bat Algorithm Based on Multipopulation Strategy of Island Model for Solving Global Function Optimization Problem. Comput. Intell. Neurosc. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Alatas, B.; Akin, E.; Ozer, A. Chaos embedded particle swarm optimization algorithms. Chaos Soliton Fract. 2009, 40, 1715–1734. [Google Scholar] [CrossRef]
- Yousria, A.; Nasr, S.; El-Desoky, I.; Hendawy, Z.; Mousa, A. Enhanced Genetic Algorithm and Chaos Search for Bilevel Programming Problems. In Advances in Intelligent Systems and Computing; Hassanien, A., Ed.; Springer: Cham, Switzerland, 2019; pp. 478–487. [Google Scholar]
- Zhongping, W.; Guangmin, W.; Bin, S. A hybrid intelligent algorithm by combining particle swarm optimization with chaos searching technique for solving nonlinear bilevel programming problems. Swarm Evol. Comput. 2013, 8, 26–32. [Google Scholar]
- Zhao, H.; Gao, Z. Chaos Search Method for Bilevl Programming. J. Syst. Sci. Inf. 2005, 3, 553–560. [Google Scholar]
- Sinha, A.; Malo, P.; Kalyanmoy, D. Test problem construction for single-objective bilevel optimization. Evol. Comput. 2014, 22, 439–477. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sinha, A.; Malo, P.; Deb, K. Unconstrained scalable test problems for Single-objective bilevel optimization. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, QLD, Australia, 10–15 June 2012. [Google Scholar]
- Wang, Y.; Jiao, Y.; Li, H. An evolutionary algorithm for solving nonlinear bilevel programming based on a new constraint-handling scheme. IEEE Transp. Syst. Man Cybern. Part C 2005, 35, 221–232. [Google Scholar] [CrossRef]
- Colson, B.; Marcotte, P.; Savard, G. An overview of bilevel optimization. Ann. Oper. Res. 2007, 153, 235–256. [Google Scholar] [CrossRef]
- Nasr, S.; El-Shorbagy, M.; El-Desoky, I.; Hendawy, Z.; Mousa, A. Hybrid genetic algorithm for constrained nonlinear optimization problems. Brit. J. Math. Comput. Sci. 2015, 7, 466–480. [Google Scholar] [CrossRef]
- Abd-El-Wahed, W.; Mousa, A.; El-Shorbagy, M. Integrating particle swarm optimization with genetic algorithms for solving nonlinear optimization problems. J. Comput. Appl. Math. 2011, 235, 1446–1453. [Google Scholar] [CrossRef]
- El-Shorbagy, M.; Mousa, A.; Nasr, S. A chaos-based evolutionary algorithm for general nonlinear programming problems. Chaos Soliton Fract. 2016, 85, 8–21. [Google Scholar] [CrossRef]
- Tavazoei, M.; Haeri, M. Comparison of different one-dimensional maps as chaotic search pattern in chaos optimization algorithms. Appl. Math. Comput. 2007, 187, 76–85. [Google Scholar] [CrossRef]
- Hilborn, R.B. Chaos and Nonlinear Dynamics: An Introduction for Scientists and Engineers, 2nd ed.; Oxford University Press: Oxford, UK, 2004. [Google Scholar]
- Lu, P.; Zhou, J.; Zhang, H.; Zhang, R.; Wang, C. Chaotic differential bee colony optimization algorithm for dynamic economic dispatch problem with valve-point effects. Int. J. Electr. Power 2014, 62, 130–143. [Google Scholar] [CrossRef]
- Mousa, A.; El-Shorbagy, M.; Abd-El-Wahed, W. Local search-based hybrid particle swarm optimization algorithm for multiobjective optimization. Swarm Evol. Comput. 2012, 3, 1–14. [Google Scholar] [CrossRef]
- Mousa, A.A.; El-Wahed, W.F.A.; Rizk-Allah, R.M. A hybrid ant optimization approach based local search scheme for multiobjective design optimizations. Electr. Power Syst. Res. 2011, 81, 1014–1023. [Google Scholar] [CrossRef]
- Mousa, A. Hybrid ant optimization system for multiobjective economic emission load dispatch problem under fuzziness. Swarm Evol. Comput. 2014, 81, 11–21. [Google Scholar] [CrossRef]
- Genlin, J. Survey on genetic algorithm. Comput. Appl. Soft 2004, 2, 69–73. [Google Scholar]
- Osman, M.; Abo-Sinna, M.; Mousa, A. A solution to the optimal power flow using genetic algorithm. Appl. Math. Comput. 2004, 155, 391–405. [Google Scholar] [CrossRef]
- Mirjalili, S.; Dong, J.; Sadiq, A.; Faris, H.B. Genetic Algorithm: Theory, Literature Review, and Application in Image Reconstruction. In Studies in Computational Intelligence; Springer: Cham, Switzerland, 2019; pp. 69–85. [Google Scholar]
- Wang, Y.; Li, H.; Dang, C. A new evolutionary algorithm for a class of nonlinear bilevel programming problems and its global convergence. Inf. J. Comput. 2011, 23, 618–629. [Google Scholar] [CrossRef]
- Islam, M.; Singh, H.; Ray, T.; Sinha, A. An enhanced memetic algorithm for single-objective bilevel optimization problem. Evol. Comput. 2016, 25, 607–642. [Google Scholar] [CrossRef]
- Wang, G.; Ma, L.; Chen, J. A bilevel improved fruit fly optimization algorithm for the nonlinear bilevel programming problem. Knowl.-Based Syst. 2017, 138, 113–123. [Google Scholar] [CrossRef]



















| Problem | Upper Level Objective Function | |||||
|---|---|---|---|---|---|---|
| CGA-BS | BLEAQ [27] | NEA [41] | NEA1 [56] | PSO-CST [36] | Cor. Ref. [36] | |
| TP1 | 225.00 | 225.00 | 225.00 | 225.00 | - | 225.00 |
| TP2 | 0.00 | 1.27 × 10−2 | 0.00 | 0.00 | - | 5.00 |
| TP3 | −18.94 | −18.68 | −12.68 | −12.68 | −14.78 | −12.68 |
| TP4 | −29.35 | −29.16 | −29.20 | −29.20 | −29.21 | −29.20 |
| TP5 | −3.90 | −3.59 | −3.92 | −3.92 | - | −3.15 |
| TP6 | −1.25 | −1.21 | −1.21 | −1.21 | −1.17 | 3.57 |
| TP7 | −1.96 | −1.87 | −1.98 | −1.98 | −1.98 | −1.98 |
| TP8 | 8.75 × 10−5 | 1.8 × 10−3 | 0.00 | 0.00 | - | 5.00 |
| TP9 | 8.68 × 10−6 | 1.20 × 10−5 | - | - | - | - |
| TP10 | 1.24 × 10−4 | 1.03 × 10−4 | - | - | - | - |
| Problem | Lower Level Objective Function | |||||
|---|---|---|---|---|---|---|
| CGA-BS | BLEAQ [27] | NEA [41] | NEA1 [56] | PSO-CST [36] | Cor. Ref. [36] | |
| TP1 | 99.99 | 100.00 | 100.00 | 100.00 | - | 100.00 |
| TP2 | 200.00 | 99.99 | 100.000 | 100.00 | - | 0.00 |
| TP3 | −1.16 | −1.02 | −1.02 | −1.06 | −0.23 | −1.06 |
| TP4 | 3.01 | 3.19 | 3.20 | 3.20 | −0.23 | 3.20 |
| TP5 | −2.03 | −1.96 | −2.00 | −2.00 | - | −16.29 |
| TP6 | 8.07 | 7.61 | 7.62 | 7.62 | 7.44 | 2.40 |
| TP7 | 1.87 | 1.87 | 1.98 | 1.98 | 1.98 | 1.95 |
| TP8 | 199.99 | 99.99 | 100.00 | 100.00 | - | 0.00 |
| TP9 | 2.72 | 1.00 | - | - | - | - |
| TP10 | 2.72 | 1.00 | - | - | - | - |
| Problem | Optimal Solutions | CGA-BS Results | ||
|---|---|---|---|---|
| SMD1 | 0 | 0 | 0 | 0 |
| SMD2 | 0 | 0 | 4.7659 × 10−6 | 2.2190 × 10−6 |
| SMD3 | 0 | 0 | 0 | 0 |
| SMD4 | 0 | 0 | 5.5692 × 10−12 | 3.4094 × 10−11 |
| SMD5 | 0 | 0 | 1.1324 × 10−9 | 1.1324 × 10−9 |
| SMD6 | 0 | 0 | 9.3428 × 10−11 | 9.3428 × 10−11 |
| Problem | Upper Level Accuracy | |||||||
|---|---|---|---|---|---|---|---|---|
| CGA-BS | BLMA [57] | NBLEA [57] | BLEAQ [57] | BIDE [57] | FOA [58] | PSO [58] | LGMS-FOA [58] | |
| SMD1 | 0 | 1 × 10−6 | 5.03 × 10−6 | 1.00 × 10−6 | 3.41 × 10−6 | 5.55 × 10−10 | 1.79 | 3.14 × 10−4 |
| SMD2 | 2.22 × 10−6 | 1 × 10−6 | 3.17 × 10−6 | 5.44 × 10−6 | 1.29 × 10−6 | 8.60 × 10−12 | 3.53 | 1.20 × 101 |
| SMD3 | 0 | 1 × 10−6 | 1.37 × 10−6 | 7.55 × 10−6 | 4.10 × 10−6 | 5.98 × 10−10 | 3.05 | 8.58 × 10−4 |
| SMD4 | 3.41 × 10−11 | 1 × 10−6 | 9.29 × 10−6 | 1.00 × 10−6 | 2.30 × 10−6 | 1.3 × 10−13 | 8.09 | 2.13 × 10−2 |
| SMD5 | 1.13 × 10−9 | 1 × 10−6 | 1.00 × 10−6 | 1.00 × 10−6 | 1.58 × 10−6 | 9.4 × 10−8 | 1.08 × 102 | 1.49 |
| SMD6 | 9.34 × 10−11 | 1 × 10−6 | 1.00 × 10−6 | 1.00 × 10−6 | 3.47 × 10−6 | - | - | - |
| Problem | CGA-BS | NEA1 [56] | PSO-CST [36] | |||
|---|---|---|---|---|---|---|
| P1 | −18.5999 | −1.3902 | −12.6800 | 1.0160 | −14.7772 | −0.2316 |
| P2 | −29.3529 | 3.0083 | −29.2000 | 3.2000 | −29.2064 | 2.3641 |
| P3 | −8.9301 | −4.3844 | −8.9200 | −6.1400 | - | - |
| P4 | −7.0717 | −0.5088 | −7.5800 | .05740 | - | - |
| P5 | −12.2095 | −410.0104 | −11.9990 | 163.4200 | - | - |
| P6 | −3.5990 | −1.9998 | −3.6000 | −2.0000 | - | - |
| P7 | −3.9014 | −2.0302 | −3.9200 | −2.0000 | - | - |
| P8(Max) | 1000.2 | 1.0518 | 1000 | 1 | 640.7139 | 0.9946 |
| P9 | 100.0038 | 872.7460 | 100.0001 | 3.500 × 10−11 | 100.0393 | 1.3500 × 10−16 |
| P10 | −1.2520 | 8.0708 | −1.2098 | 3.5700 | −1.1660 | 7.4441 |
| P11(Max) | 2.0112 | −2.0112 | 1.9802 | −1.9802 | 1.9816 | −1.9816 |
| P12 | −29.9602 | 0.5672 | −29.2000 | 0.3148 | - | - |
| P13 | 0 | 200.0000 | 0 | 100.0000 | - | - |
| P14 | 0 | 200.0000 | 0 | 100.0000 | 5.27 × 10−2 | 1.0000 × 10−8 |
| P15 | 0 | 200.0000 | 0 | 100.0000 | 4.0000 × 10−4 | 1.0000 × 10−8 |
| P16 | 1.2676 × 10−5 | 38.6877 | 8.9900 × 10−13 | 0.3148 | 7.5000 × 10−3 | 125.08540 |
| P17 | 1.9891 × 10−11 | 1.3981 × 10−10 | 6.2149 × 10−4 | 1.0000 | 0.0000 | 84.2367 |
| P18 | 6.2780 × 10−7 | 23.9314 | 8.5086 × 10−9 | 1.0000 | 1.0000 × 10−4 | 25.6292 |
| P19 | 3.3559 × 10−8 | 6.9743 | 2.0325 × 10−5 | 1.0000 | 8.2000 × 10−3 | 2.5621 |
| P20 | 1.6211 × 10−9 | 13.8708 | 6.1725 × 10−8 | 1.0000 | 3.7400 × 10−2 | 2.6969 |
| P21 | 3.4837 × 10−9 | 7.5534 | 7.2265 × 10−3 | 1.0000 | 3.3700 × 10−2 | 2.7442 |
| P22 | 1.8887 × 10−7 | 0.3182 | - | - | - | - |
| P23 | 2.6713 × 10−6 | 0.2997 | - | - | - | - |
| P24 | 1.6865 × 10−6 | 0.6745 | - | - | - | - |
| Problem | Upper Level F(x,y) | |||
|---|---|---|---|---|
| CGA | CGA-BS | CGA | CGA-BS | |
| TP1 | 229.3517 | 225.0001 | 178.9341 | 99.9999 |
| TP2 | 0 | 0 | 200.0000 | 200.0000 |
| TP3 | −18.9365 | −18.9365 | −1.1563 | −1.1563 |
| TP4 | −29.3529 | −29.3529 | 3.0080 | 3.0080 |
| TP5 | −1.0407 | −3.9014 | −1.0083 × 10−5 | −2.0300 |
| TP6 | −0.9609 | −1.2520 | 8.2634 | 8.0708 |
| TP7 | −1.9600 | −1.9600 | 1.9660 | 1.9660 |
| TP8 | 8.7468 × 10−5 | 8.7468 × 10−5 | 199.9989 | 199.9989 |
| TP9 | 8.6845 × 10−6 | 8.6845 × 10−6 | 2.7183 | 2.7183 |
| TP10 | 1.2379 × 10−4 | 1.2379 × 10−4 | 2.7183 | 2.7183 |
| Problem | ||||
|---|---|---|---|---|
| GA-BS | CGA-BS | GA-BS | CGA-BS | |
| SMD1 | 1.0455 × 10−5 | 0 | 3.3729 × 10−6 | 0 |
| SMD2 | 2.6470 × 10−5 | 4.7659 × 10−6 | 3.3886 × 10−6 | 2.2190 × 10−6 |
| SMD3 | 3.5227 × 10−5 | 0 | 1.2578 × 10−5 | 0 |
| SMD4 | 1.0295 × 10−11 | 5.5692 × 10−12 | 3.2578 × 10−11 | 3.4094 × 10−11 |
| SMD5 | 5.5398 × 10−6 | 1.1322 × 10−9 | 5.5397 × 10−6 | 1.1322 × 10−9 |
| SMD6 | 5.2723 × 10−6 | 9.3428 × 10−11 | 1.7905 × 10−8 | 9.3428 × 10−11 |
| Problem | Median Upper Level Function Evaluations | ||||
|---|---|---|---|---|---|
| CGA-BS | BLMA [57] | NBLE [57] | BLEAQ [57] | BIDE [57] | |
| SMD1 | 1.0101 × 104 | 4.1200 × 102 | 1.5200 × 103 | 1.1900 × 103 | 6.0000 × 103 |
| SMD2 | 5.0003 × 104 | 4.2400 × 102 | 1.5600 × 103 | 1.2000 × 103 | 6.0000 × 103 |
| SMD3 | 1.0002 × 104 | 4.1200 × 102 | 1.5600 × 103 | 1.2900 × 103 | 6.0000 × 103 |
| SMD4 | 1.25003 × 105 | 5.5200 × 102 | 1.5300 × 103 | 1.3100 × 103 | 6.0000 × 103 |
| SMD5 | 1.00003 × 105 | 5.5200 × 102 | 3.4000 × 103 | 2.0600 × 103 | 6.0000 × 103 |
| SMD6 | 1.37503 × 105 | 4.8800 × 102 | 4.0600 × 103 | 4.0800 × 103 | 6.0000 × 103 |
| Problem | Median Lower Level Function Evaluations | ||||
|---|---|---|---|---|---|
| CGA-BS [57] | BLMA [57] | NBLE [57] | BLEAQ [57] | BIDE [57] | |
| SMD1 | 1.50010 × 104 | 3.05000 × 105 | 9.52000 × 105 | 2.37000 × 105 | 1.80000 × 107 |
| SMD2 | 1.50398 × 105 | 3.01000 × 105 | 9.63000 × 105 | 4.08000 × 105 | 1.80000 × 107 |
| SMD3 | 2.0000 × 104 | 3.09000 × 105 | 1.04000 × 106 | 3.02000 × 105 | 1.80000 × 107 |
| SMD4 | 2.57998 × 105 | 3.29000 × 105 | 8.33000 × 105 | 3.07000 × 105 | 1.80000 × 107 |
| SMD5 | 2.5798E × 105 | 3.28000 × 105 | 2.22000 × 106 | 8.42000 × 105 | 1.80000 × 107 |
| SMD6 | 3.38598 × 105 | 3.26000 × 105 | 1.11000 × 105 | 1.98000 × 104 | 1.80000 × 107 |
| Problem | Median Total Function Evaluations | ||||
|---|---|---|---|---|---|
| CGA-BS | BLMA [57] | NBLEA [57] | BLEAQ [57] | BIDE [57] | |
| SMD1 | 2.50010 × 104 | 3.05412 × 105 | 9.53520 × 105 | 2.38190 × 105 | 1.80060 × 107 |
| SMD2 | 2.00401 × 105 | 3.01424 × 105 | 9.64560 × 105 | 4.09200 × 105 | 1.80060 × 107 |
| SMD3 | 3.00020 × 104 | 3.09412 × 105 | 1.05560 × 106 | 3.03290 × 105 | 1.80060 × 107 |
| SMD4 | 3.83001 × 105 | 3.29552 × 105 | 8.34530 × 105 | 3.08310 × 105 | 1.80060 × 107 |
| SMD5 | 3.25801 × 105 | 3.28552 × 105 | 2.22540 × 106 | 8.44060 × 105 | 1.80060 × 107 |
| SMD6 | 4.76101 × 105 | 3.26488 × 105 | 1.115060 × 105 | 2.38000 × 104 | 1.80060 × 107 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abo-Elnaga, Y.; Nasr, S. Modified Evolutionary Algorithm and Chaotic Search for Bilevel Programming Problems. Symmetry 2020, 12, 767. https://doi.org/10.3390/sym12050767
Abo-Elnaga Y, Nasr S. Modified Evolutionary Algorithm and Chaotic Search for Bilevel Programming Problems. Symmetry. 2020; 12(5):767. https://doi.org/10.3390/sym12050767
Chicago/Turabian StyleAbo-Elnaga, Yousria, and Sarah Nasr. 2020. "Modified Evolutionary Algorithm and Chaotic Search for Bilevel Programming Problems" Symmetry 12, no. 5: 767. https://doi.org/10.3390/sym12050767
APA StyleAbo-Elnaga, Y., & Nasr, S. (2020). Modified Evolutionary Algorithm and Chaotic Search for Bilevel Programming Problems. Symmetry, 12(5), 767. https://doi.org/10.3390/sym12050767