The Motion of a Point Vortex in Multiply-Connected Polygonal Domains


Abstract
:1. Introduction
2. Computing the Hamiltonian of a Point Vortex Motion
2.1. The Conformal Mapping
2.2. The Hamiltonian for Circular Domains
2.3. The Hamiltonian for Polygonal Domains
2.4. Numerical Implementation
| Algorithm 1: Computing the Hamiltonian for the polygonal domain G. |
|
3. Simply-Connected Domains
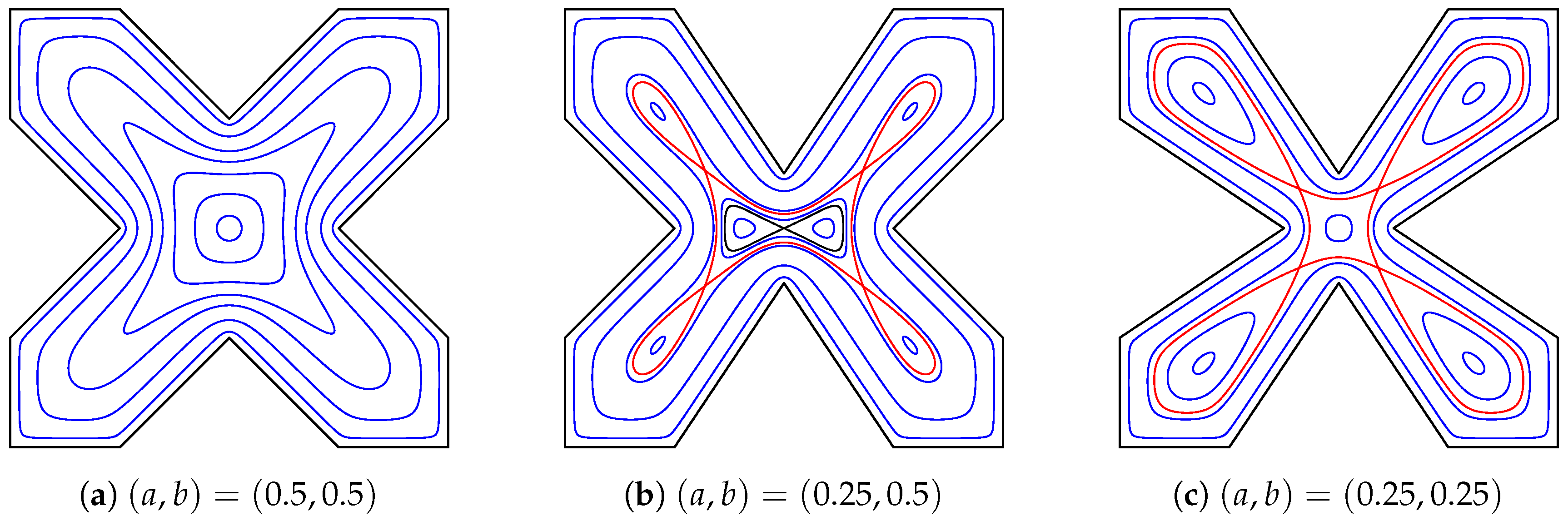
3.1. A Star-Shaped Domain
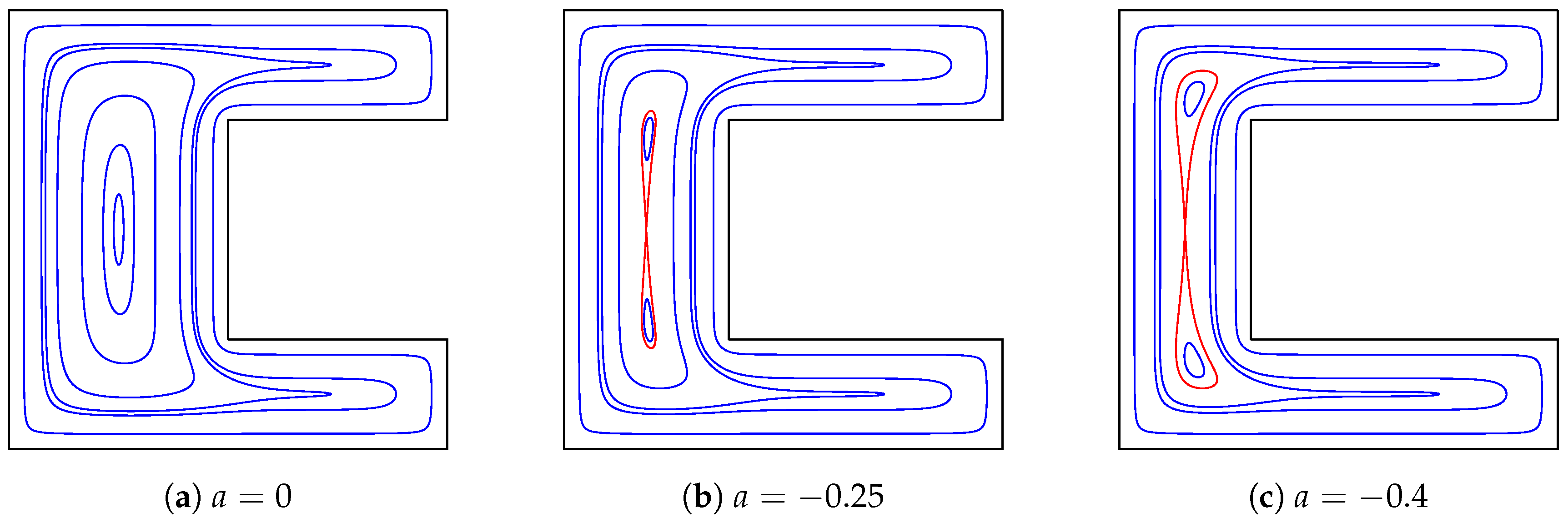
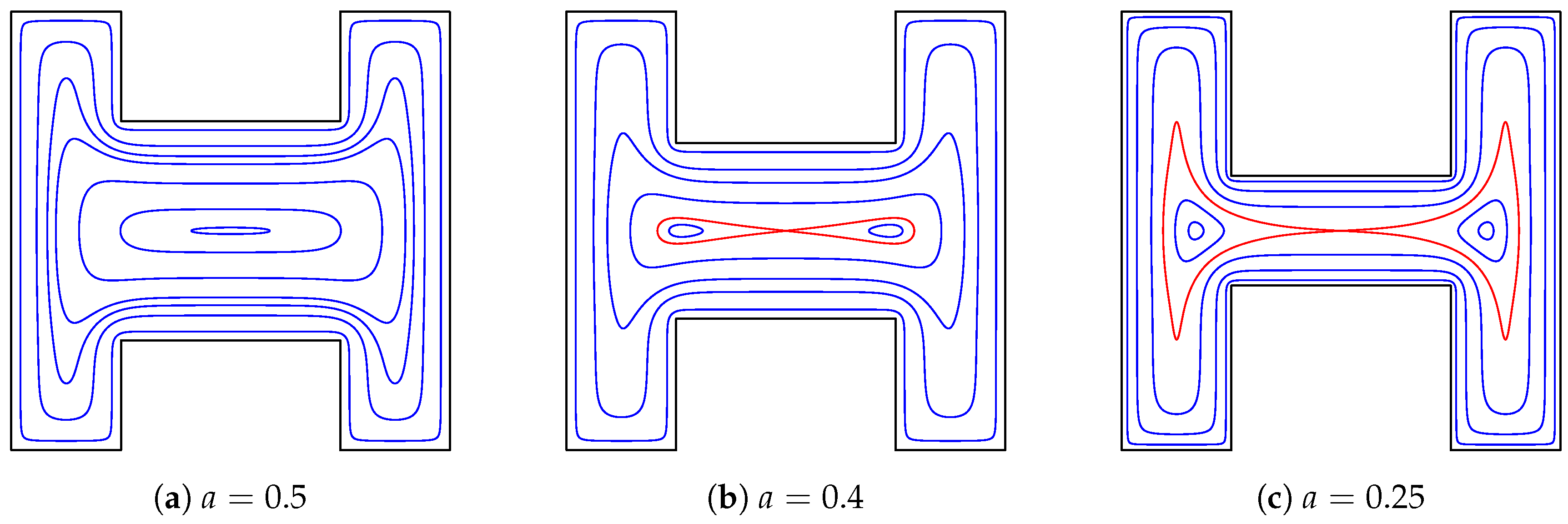
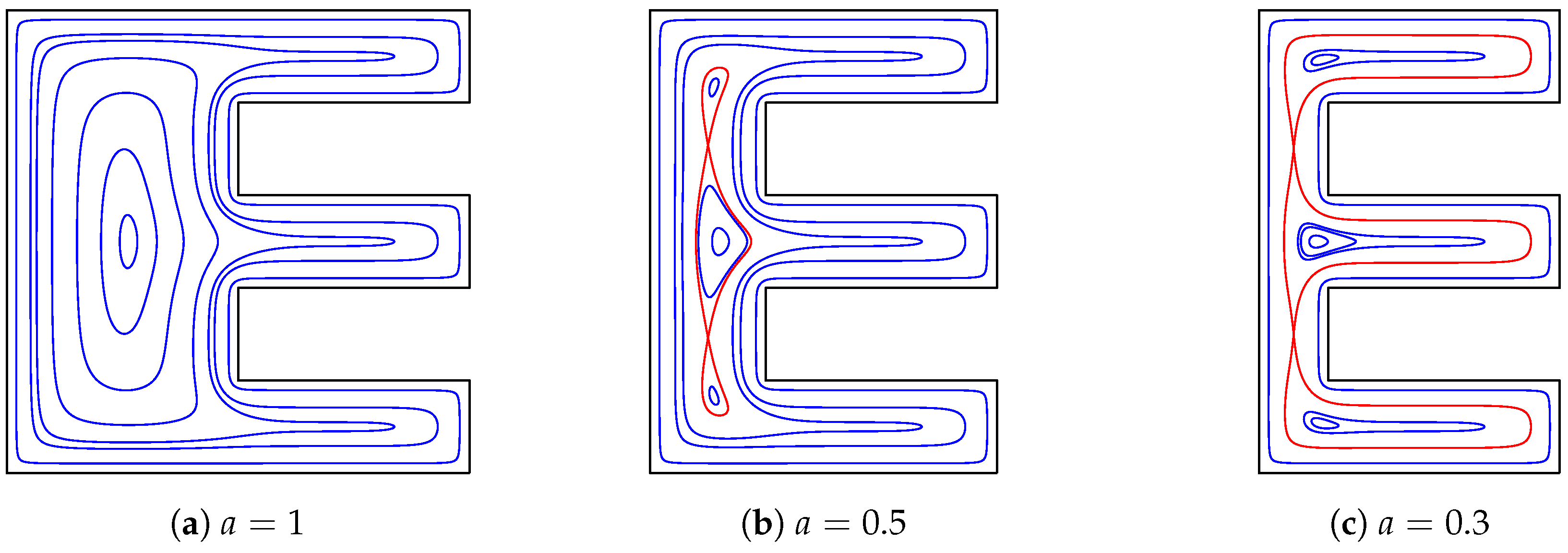
3.2. Non-Convex Polygonal Domains
4. Doubly-Connected Domains
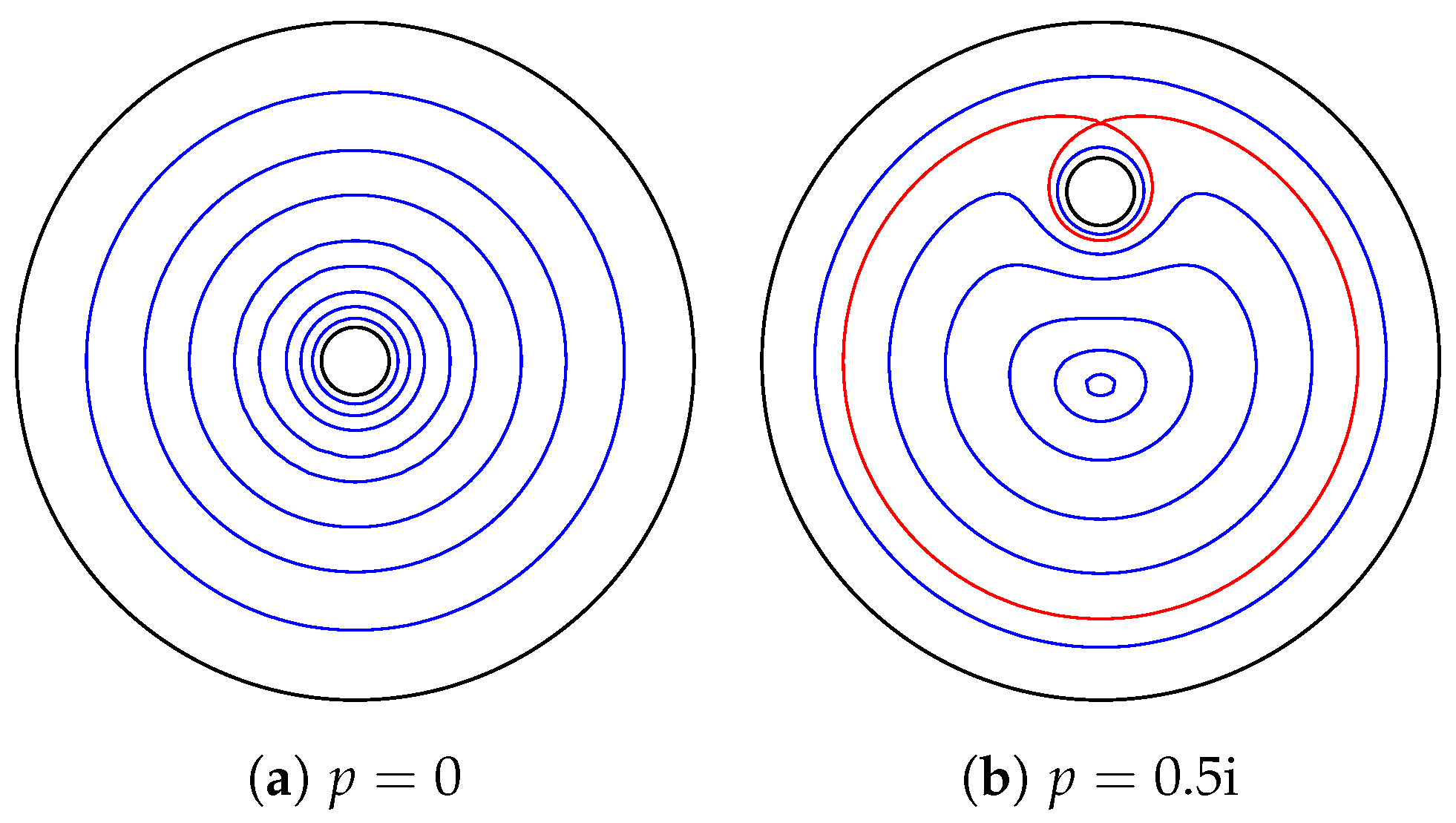
4.1. Concentric Domains
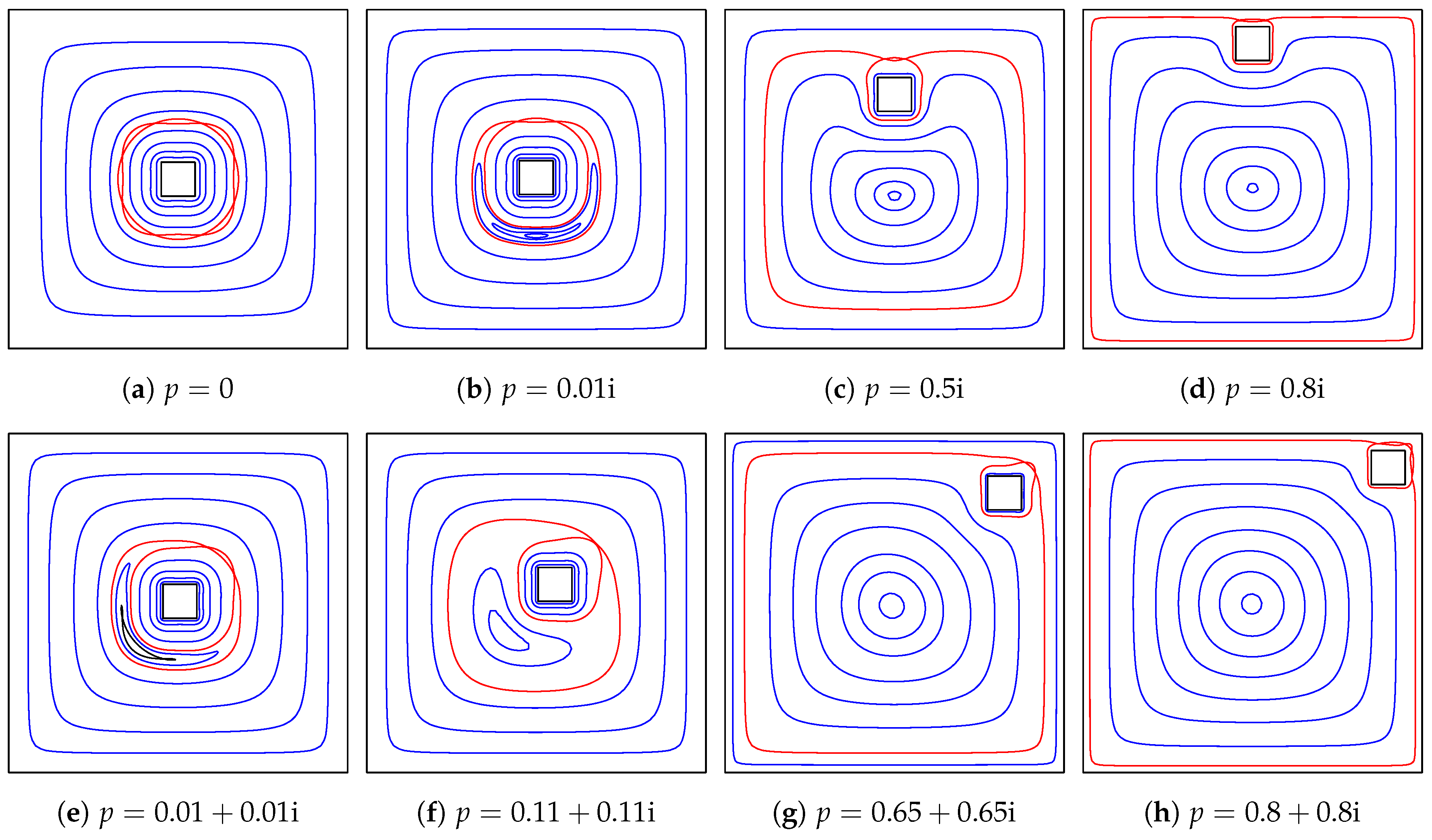
4.2. A Square Obstacle
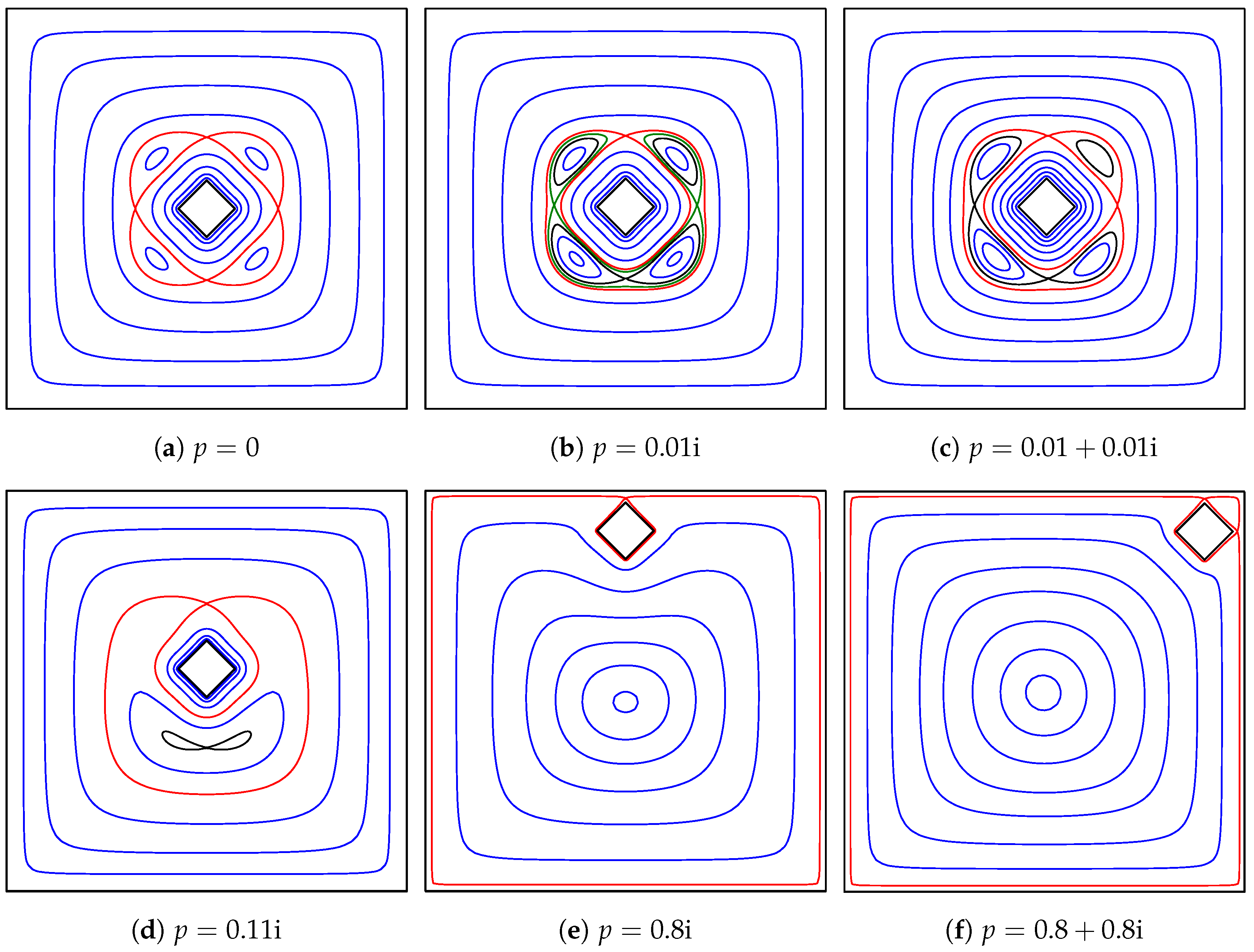
4.3. A Rotated Square Obstacle
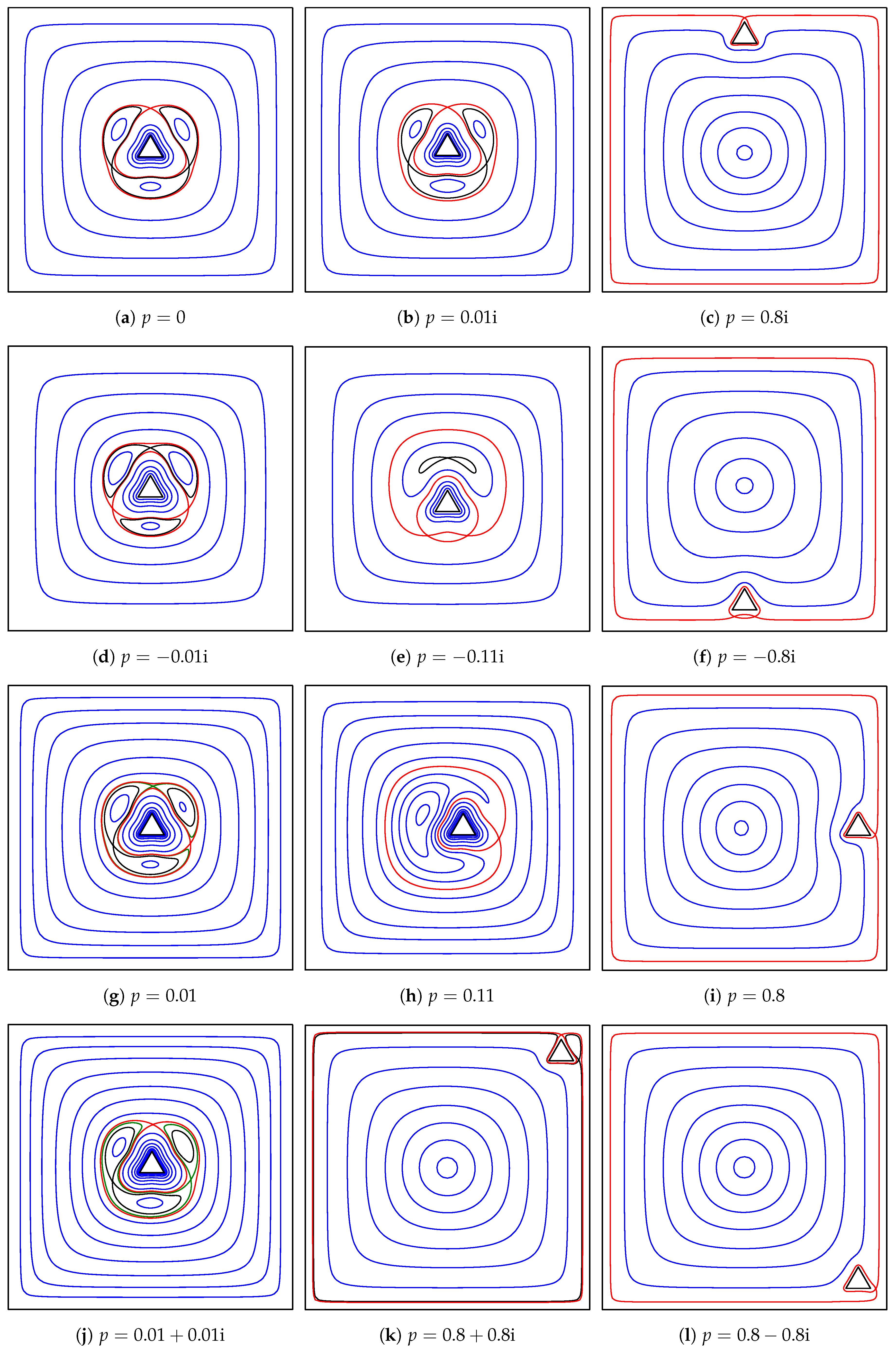
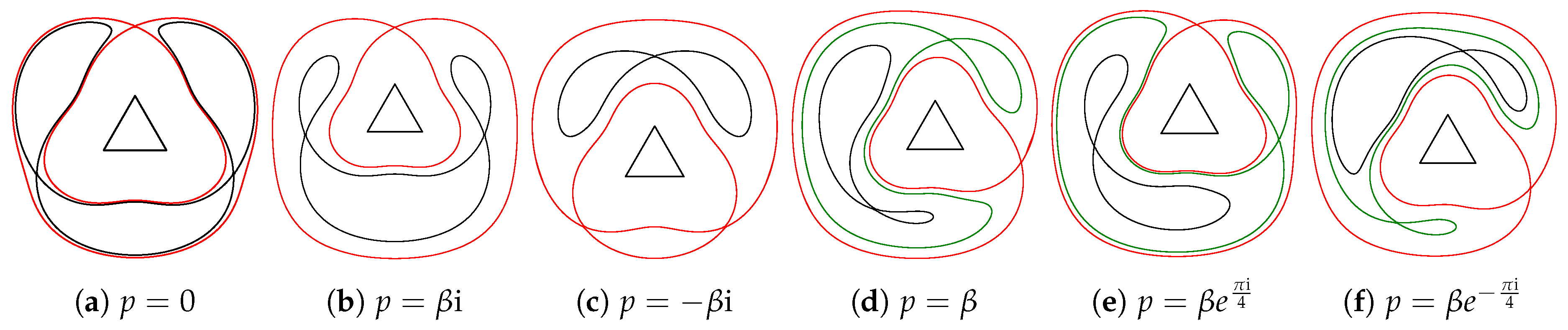
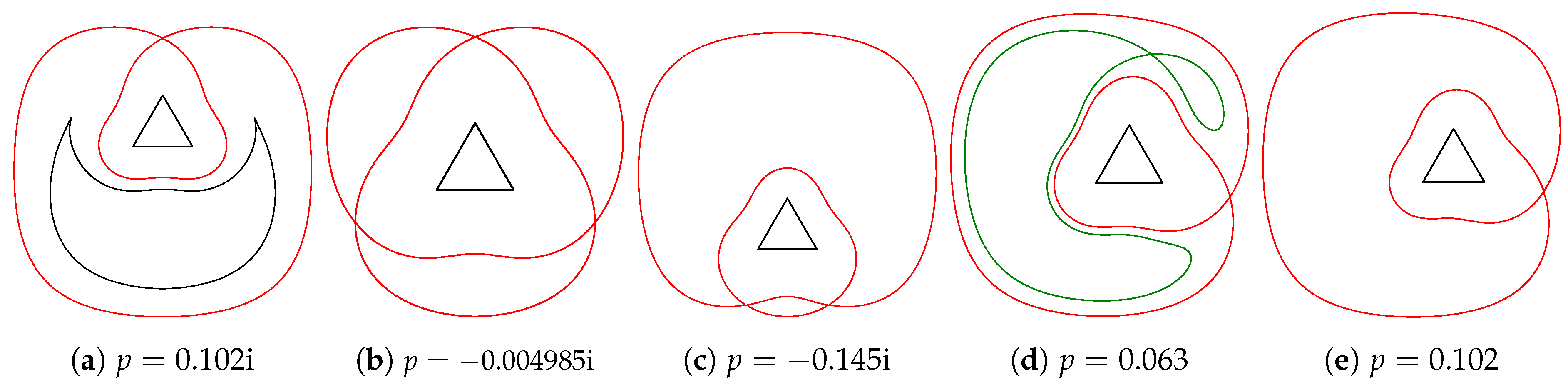
4.4. An Equilateral Triangle Obstacle
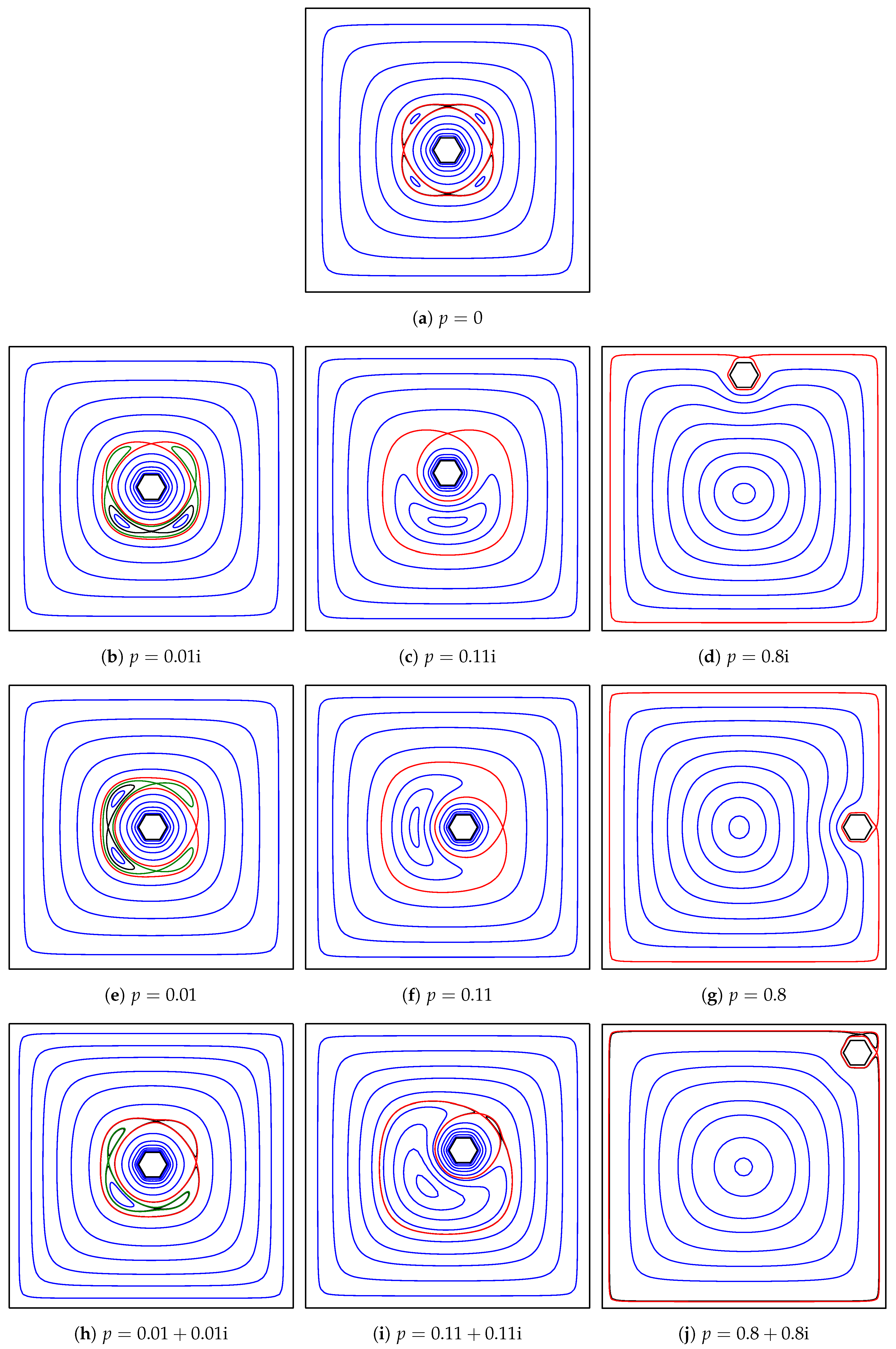
4.5. A Hexagon Obstacle
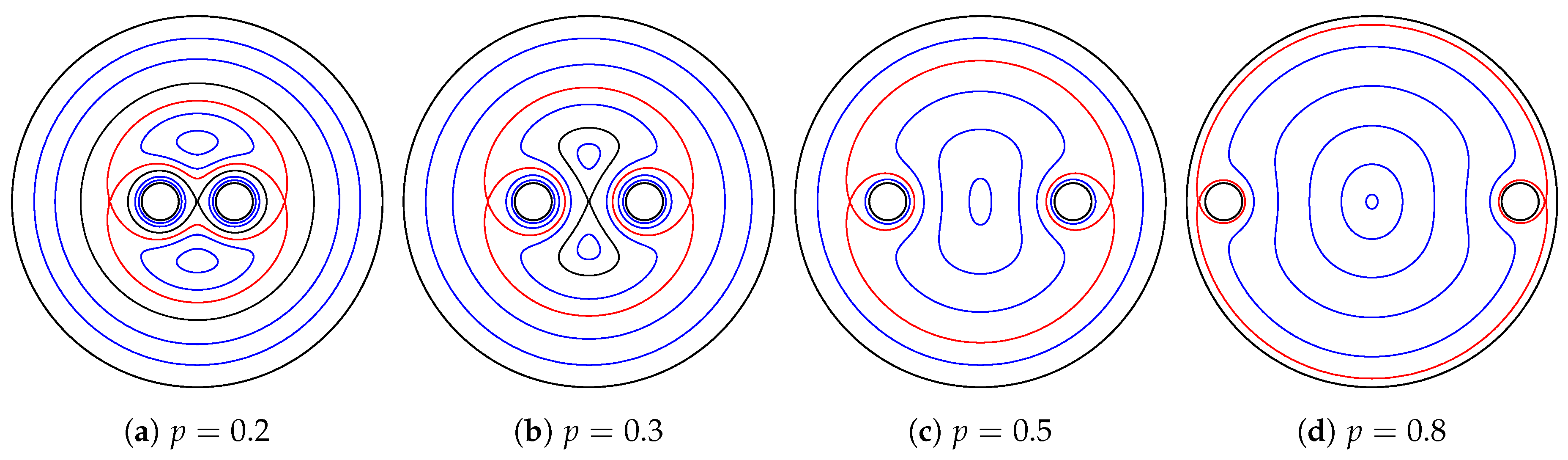
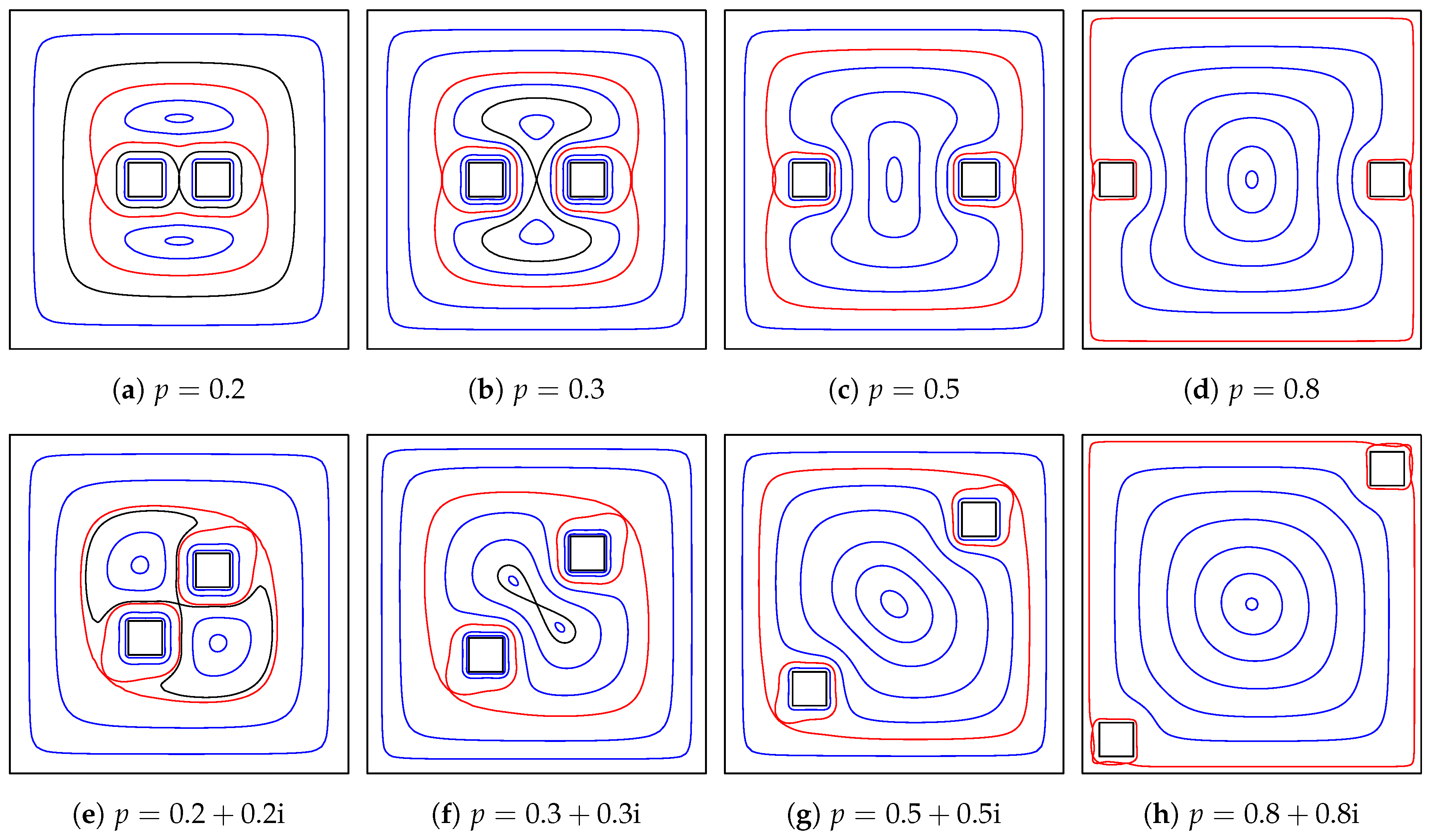
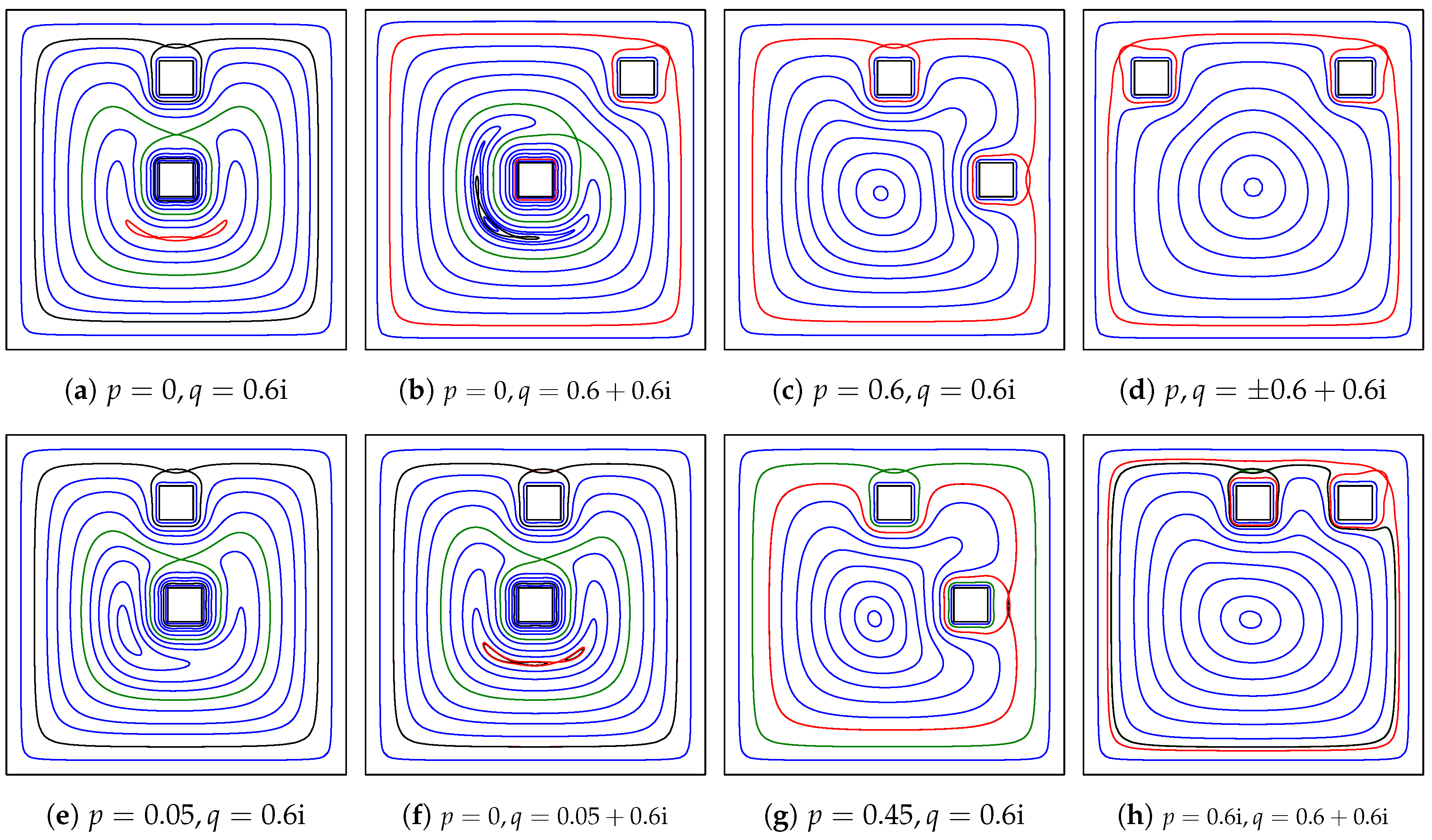
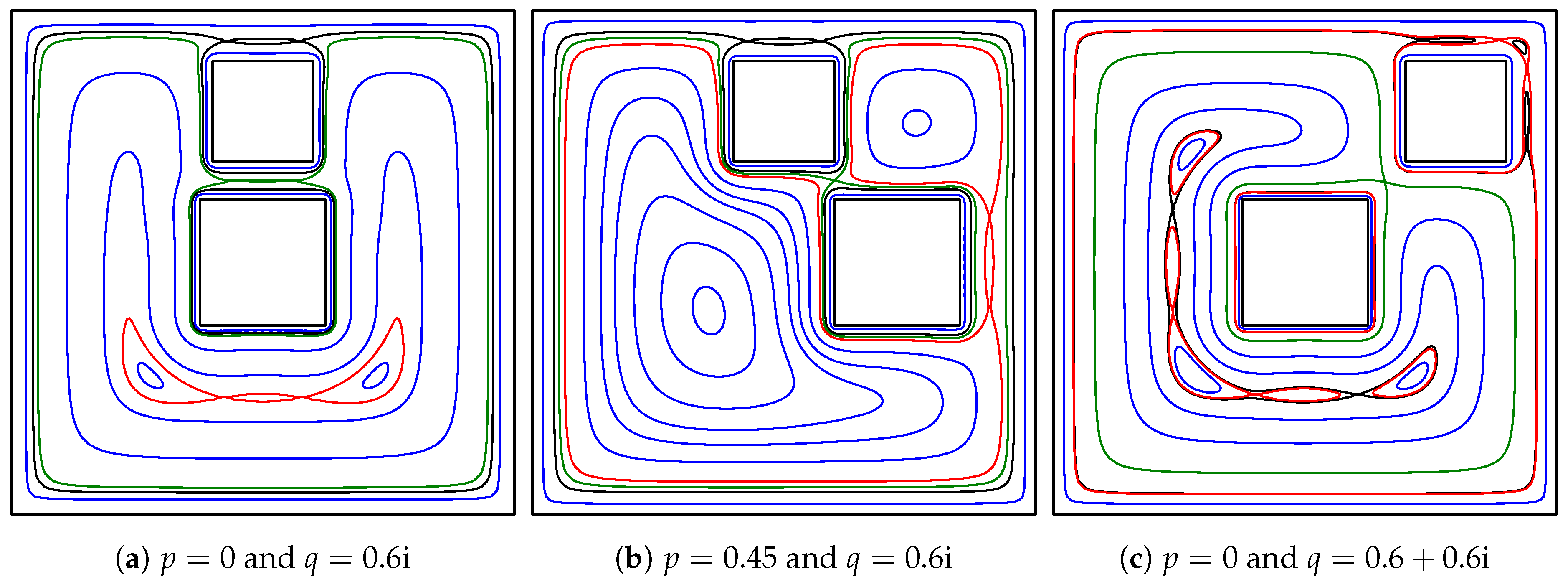
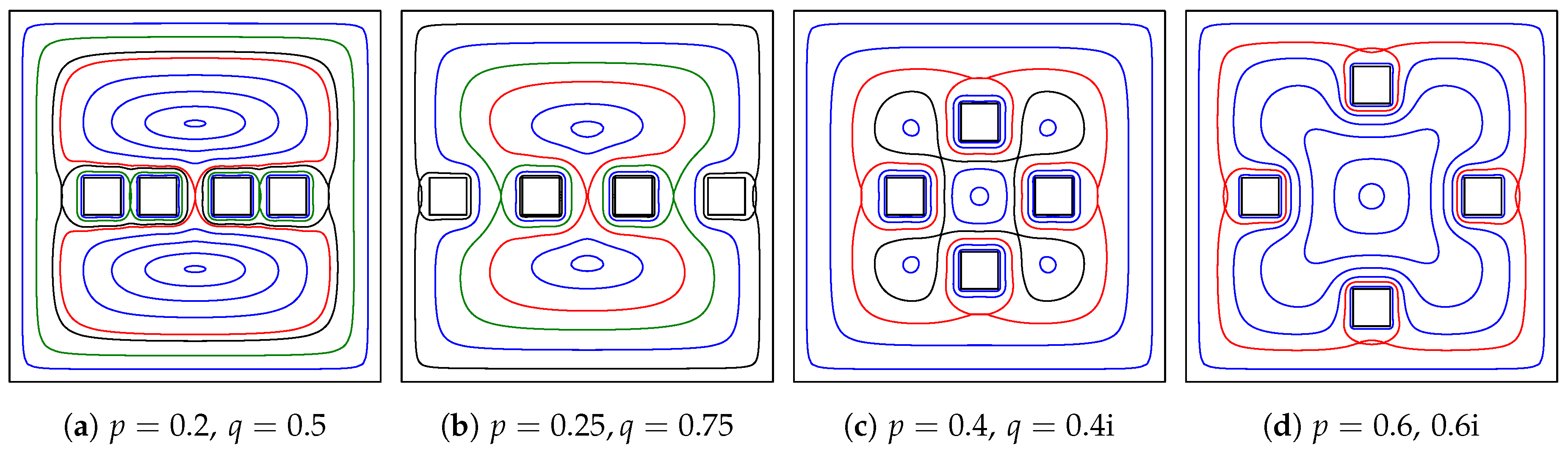
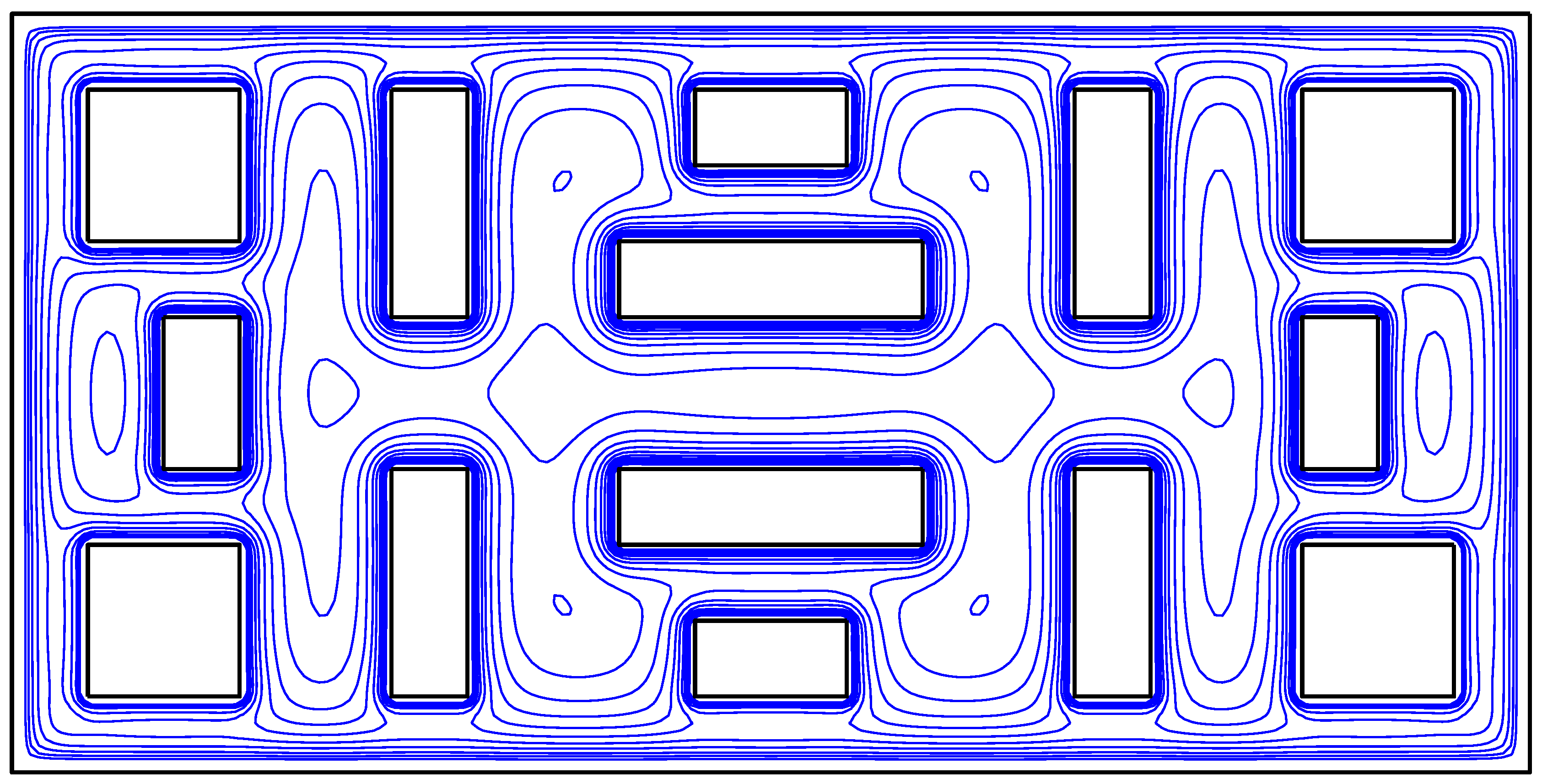
5. Multiply-Connected Domains
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Helmholtz, H. Über integrale der hydrodynamischen gleichungen, welche den Wirbelbewegungen entsprechen. J. Reine Angew. Math. 1858, 55, 25–55. [Google Scholar]
- Aref, H. Point vortex dynamics: A classical mathematics playground. J. Math. Phys. 2007, 48, 065401. [Google Scholar] [CrossRef] [Green Version]
- Boatto, S.; Crowdy, D.G. Point vortex dynamics. In Encyclopedia of Mathematical Physics; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Newton, P. The N-Vortex Problem: Analytical Techniques; Springer: New York, NY, USA, 2002. [Google Scholar]
- Saffman, P. Vortex Dynamics; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Flucher, M.; Gustafsson, B. Vortex motion in two-dimensional hydrodynamics (TRITA-MAT-97-MA-02). Royal Inst. Techn. Stockh. 1997. [Google Scholar]
- Kirchhoff, G. Vorlesungen über Mathematische Physik; Teubner: Leipzig, Germany, 1876. [Google Scholar]
- Routh, E.J. Some applications of conjugate functions. Proc. Lond. Mat. Soc. 1881, 12, 73–89. [Google Scholar] [CrossRef]
- Lin, C.C. On the motion of vortices in two dimensions. Proc. Nat. Acad. Sci. USA 1941, 27, 570–577. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johnson, E.R.; McDonald, N.R. The motion of a vortex near two circular cylinders. Proc. R. Soc. A 2004, 460, 939–954. [Google Scholar] [CrossRef]
- Crowdy, D.; Marshall, J. Analytical formulae for the Kirchhoff-Routh path function in multiply connected domains. Proc. R. Soc. A 2005, 461, 2477–2501. [Google Scholar] [CrossRef]
- Crowdy, D.; Marshall, J. The motion of a point vortex around multiple circular islands. Phys. Fluids 2005, 17, 056602. [Google Scholar] [CrossRef] [Green Version]
- Crowdy, D.; Marshall, J. The motion of a point vortex through gaps in walls. J. Fluid Mech. 2006, 551, 31–48. [Google Scholar] [CrossRef] [Green Version]
- Sakajo, T. Equation of motion for point vortices in multiply connected circular domains. Proc. R. Soc. A 2009, 465, 2589–2611. [Google Scholar] [CrossRef]
- Krantz, S.G. Geometric Function Theory: Explorations in Complex Analysis; Birkhäuser: Boston, MA, USA, 2006. [Google Scholar]
- Nasser, M.M.S. PlgCirMap: A MATLAB toolbox for computing the conformal mapping from polygonal multiply connected domains onto circular domains. arXiv 2019, arXiv:1911.01787. [Google Scholar]
- Crowdy, D. Solving Problems in Multiply Connected Domains. In Proceedings of the SIAM, CBMS-NSF Regional Conference Series in Applied Mathematics, Irvine, CA, USA, 18–22 June 2018. [Google Scholar]
- Crowdy, D.G.; Kropf, E.H.; Green, C.C.; Nasser, M.M.S. The Schottky-Klein prime function: A theoretical and computational tool for applications. IMA J. Appl. Math. 2016, 81, 589–628. [Google Scholar] [CrossRef] [Green Version]
- Nasser, M.M.S. Fast Computation of the Circular Map. Comput. Methods Funct. Theory 2015, 15, 187–223. [Google Scholar] [CrossRef] [Green Version]
- Nasser, M.M.S. Fast solution of boundary integral equations with the generalized Neumann kernel. Electron. Trans. Numer. Anal. 2015, 44, 189–229. [Google Scholar]
- Greengard, L.; Gimbutas, Z. FMMLIB2D: A MATLAB tOolbox for Fast Multipole Method in Two Dimensions. Version 1.2. Available online: http://www.cims.nyu.edu/cmcl/fmm2dlib/fmm2dlib.html (accessed on 1 January 2018).
- Gustafsson, B. On the motion of a vortex in two-dimensional flow of an ideal fluid in simply and multiply connected domains (RITA-MAT-1979-7). Royal Inst. Techn. Stockh. 1979. [Google Scholar]
- Gustafsson, B. On the convexity of a solution of Liouville’s equation. Duke Math. J. 1990, 60, 303–311. [Google Scholar] [CrossRef]
- Scott, R.K. Local and nonlocal advection of a passive scalar. Phys. Fluids 2006, 18, 116601. [Google Scholar] [CrossRef]
- Badin, G.; Barry, A.M. Collapse of generalized Euler and surface quasigeostrophic point vortices. Phys. Rev. E 2018, 98, 023110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nasser, M.M.S.; Green, C.C. A fast numerical method for ideal fluid flow in domains with multiple stirrers. Nonlinearity 2018, 31, 815–837. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Obstacle Shape | Saddle | Homoclinic | Heteroclinic |
|---|---|---|---|
| Square | 8 | 0 | 8 |
| Rotated square | 4 | 0 | 4 |
| Triangle | 3 | 4 | 1 |
| Hexagon | 4 | 4 | 2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalmoun, E.M.; Nasser, M.M.S.; Hazaa, K.A. The Motion of a Point Vortex in Multiply-Connected Polygonal Domains. Symmetry 2020, 12, 1175. https://doi.org/10.3390/sym12071175
Kalmoun EM, Nasser MMS, Hazaa KA. The Motion of a Point Vortex in Multiply-Connected Polygonal Domains. Symmetry. 2020; 12(7):1175. https://doi.org/10.3390/sym12071175
Chicago/Turabian StyleKalmoun, El Mostafa, Mohamed M. S. Nasser, and Khalifa A. Hazaa. 2020. "The Motion of a Point Vortex in Multiply-Connected Polygonal Domains" Symmetry 12, no. 7: 1175. https://doi.org/10.3390/sym12071175
APA StyleKalmoun, E. M., Nasser, M. M. S., & Hazaa, K. A. (2020). The Motion of a Point Vortex in Multiply-Connected Polygonal Domains. Symmetry, 12(7), 1175. https://doi.org/10.3390/sym12071175