Analytical Calculation of the Tooth Surface Contact Stress of Cylindrical Gear with Variable Hyperbolic Circular-Arc-Tooth-Trace

Abstract
:1. Introduction
2. Materials and Methods
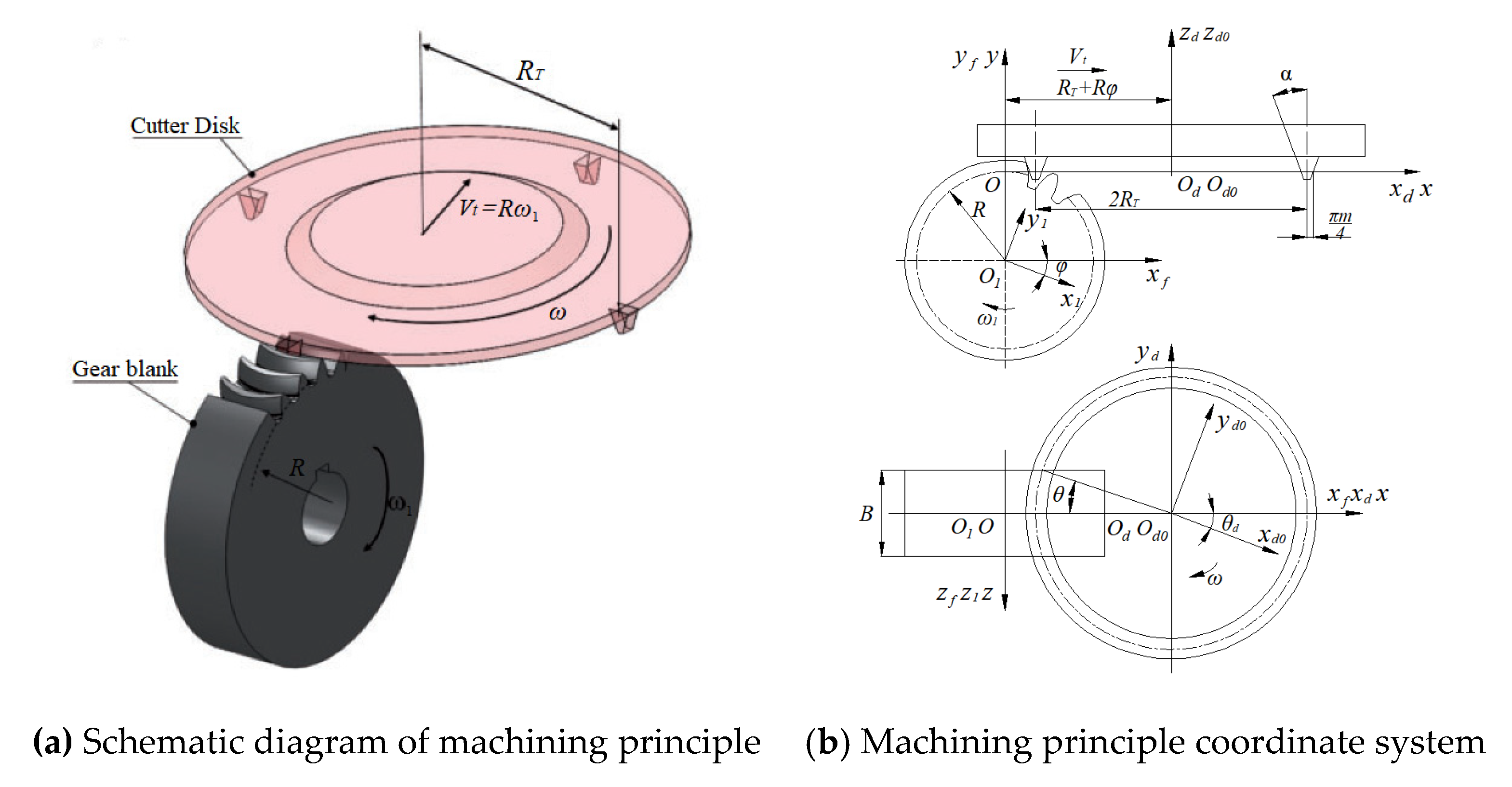
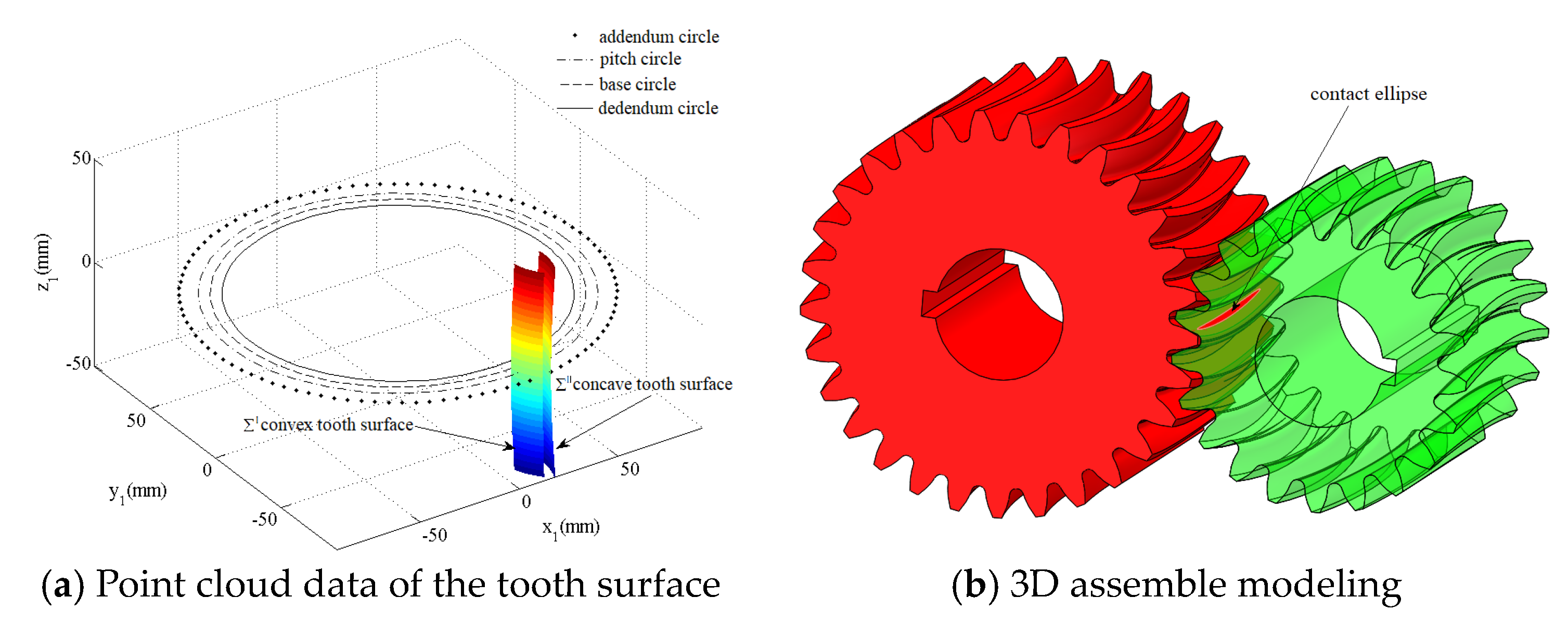
2.1. Math Equation for Tooth Surface of VH-CATT Cylindrical Gear
2.2. Computing Formula of Maximum Contact Stress of VH-CATT Cylindrical Gear
2.2.1. Hertz Contact Formula
2.2.2. Normal Force
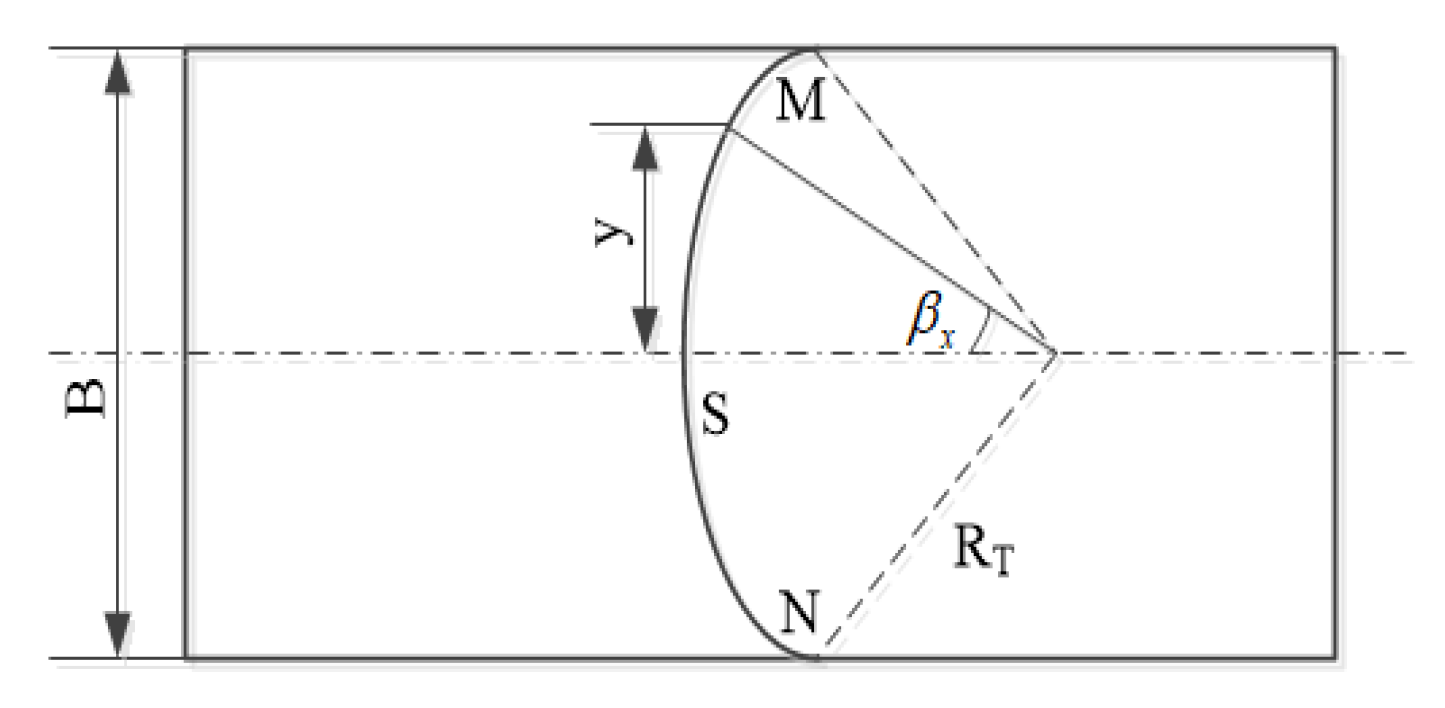
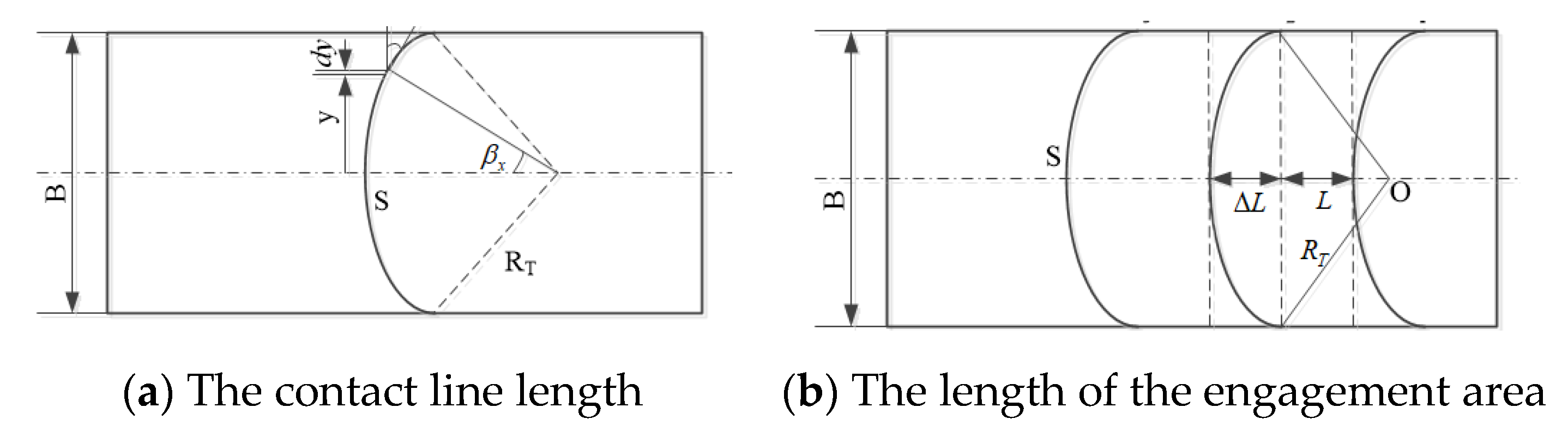
2.2.3. Total Carrying Length
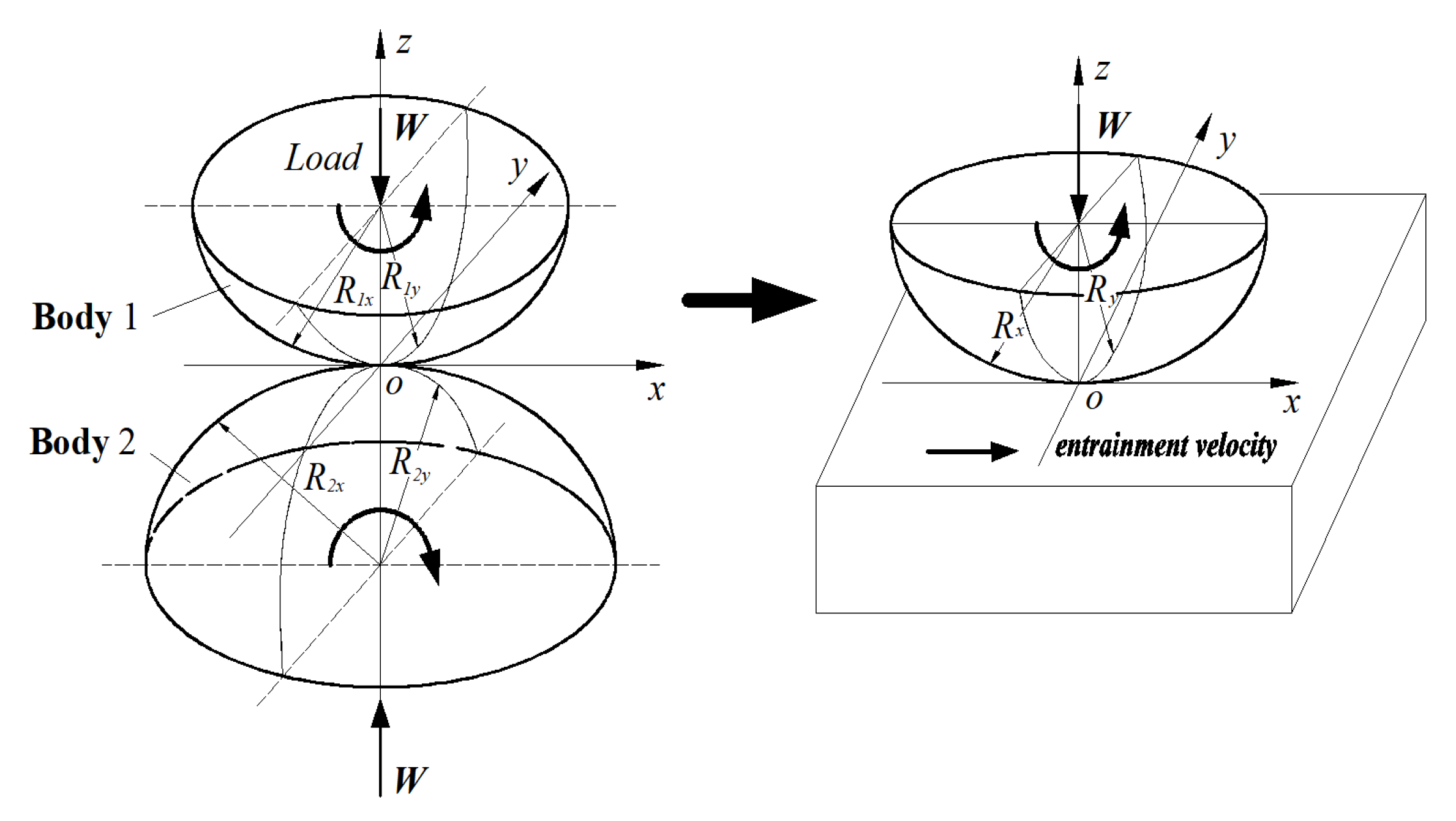
2.2.4. Synthetical Curvature Radius
3. Results
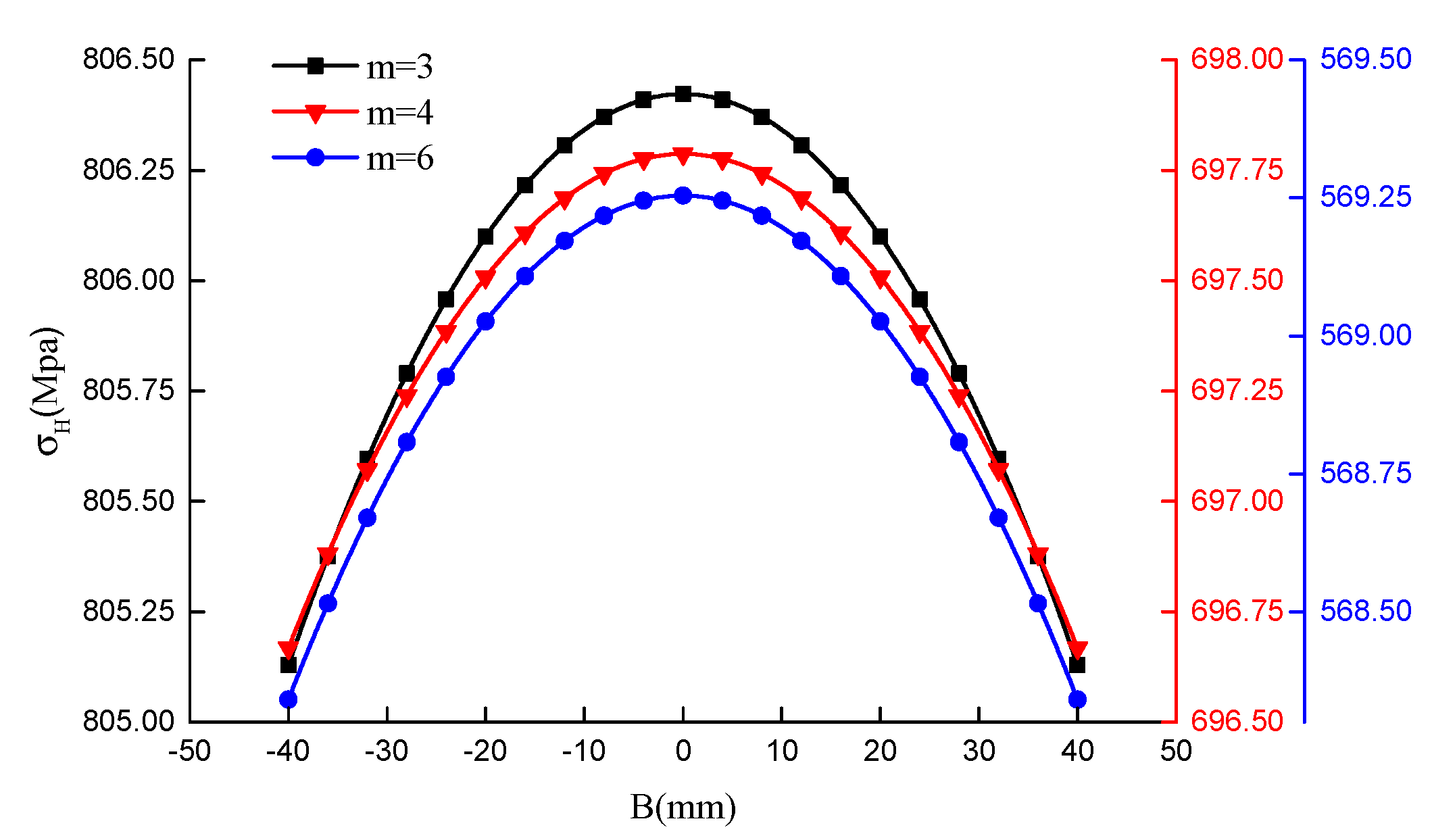
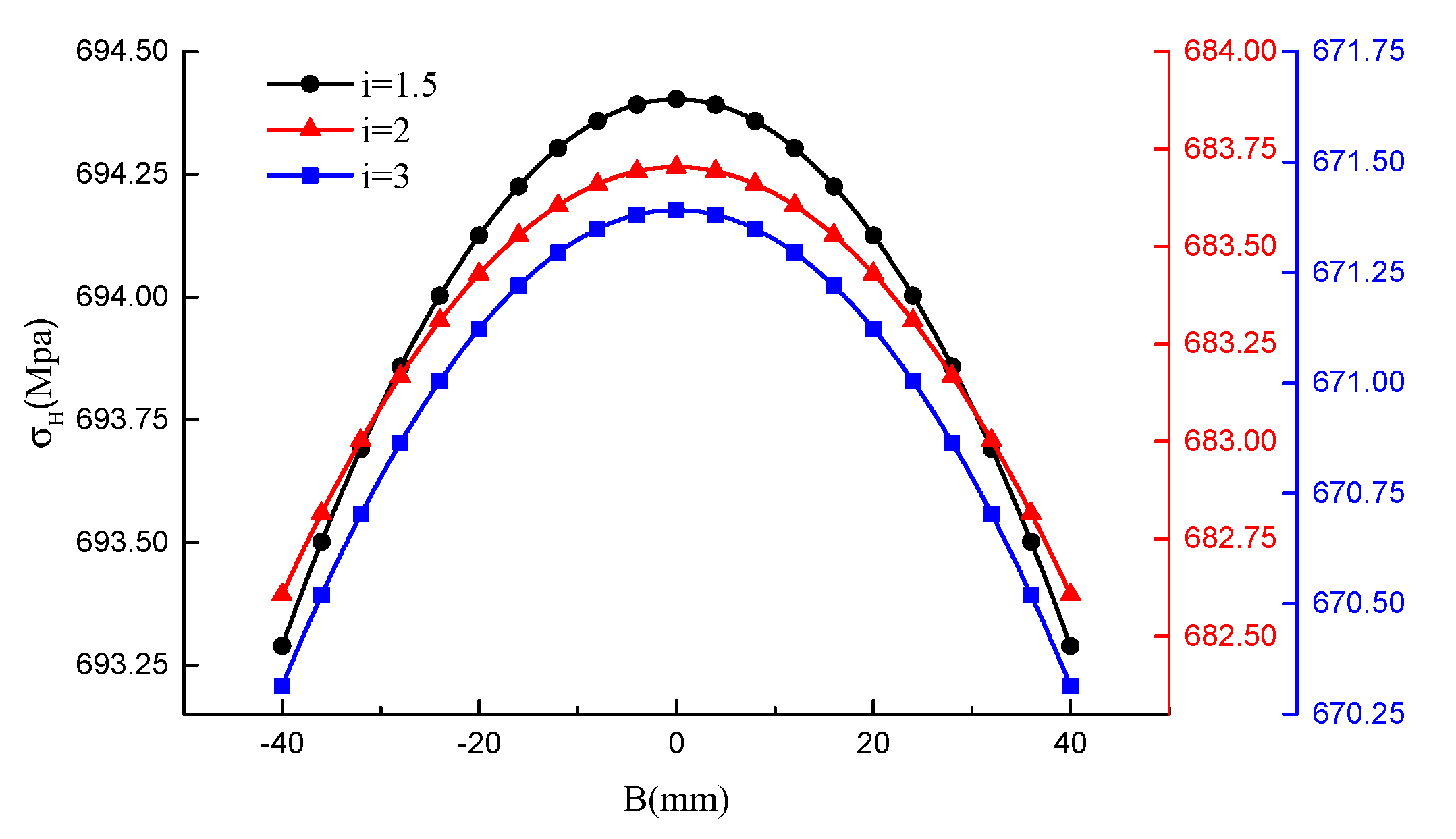
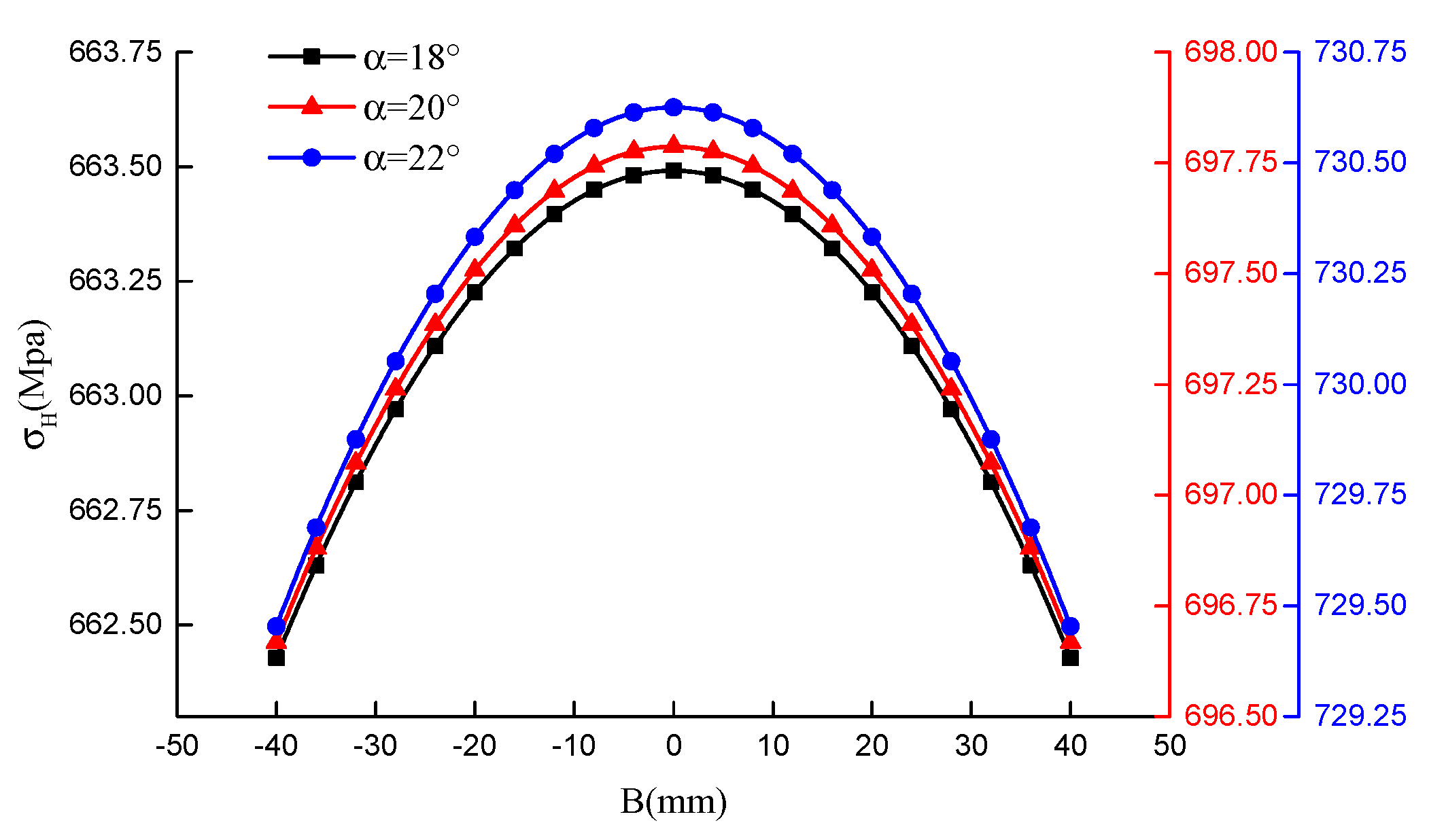
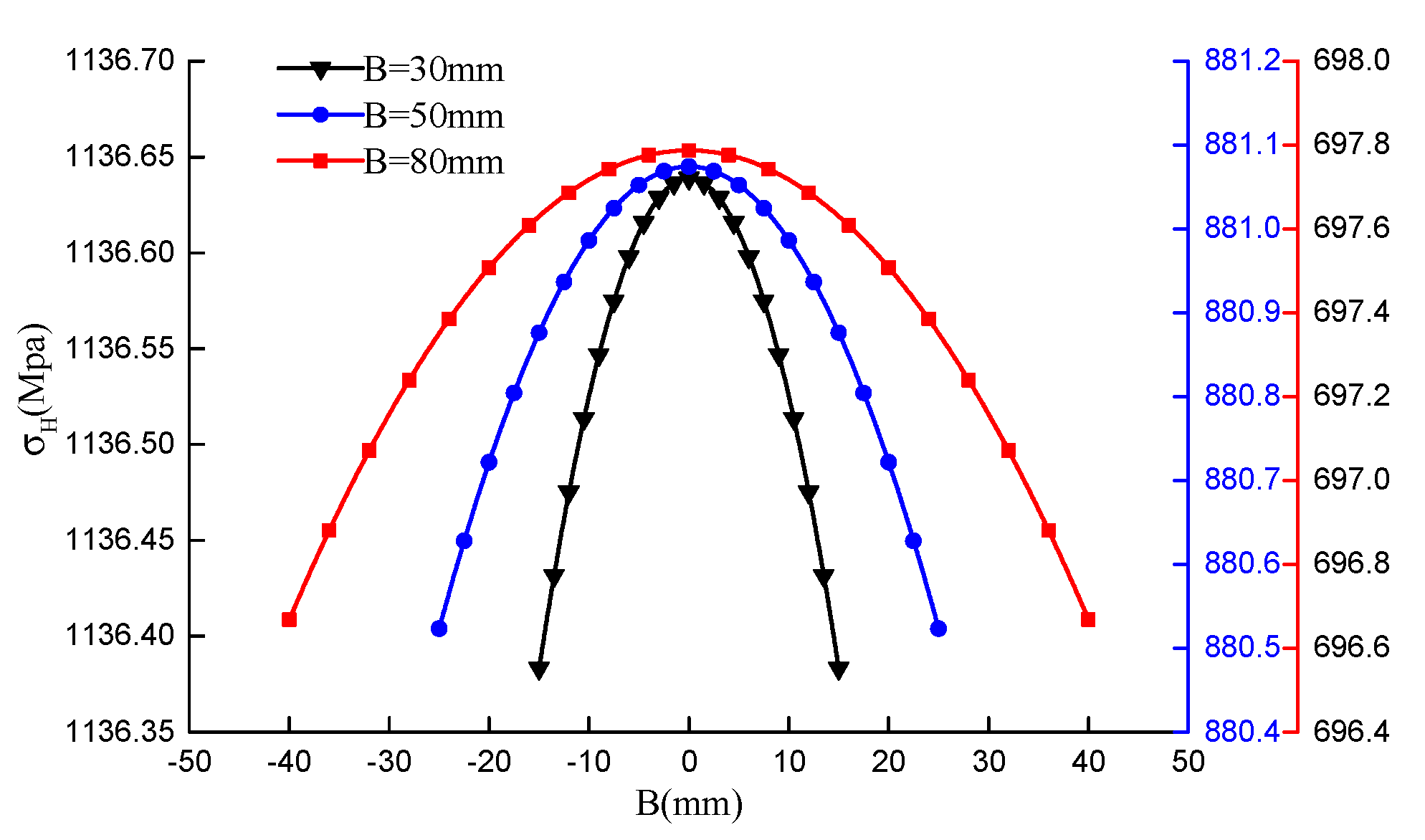
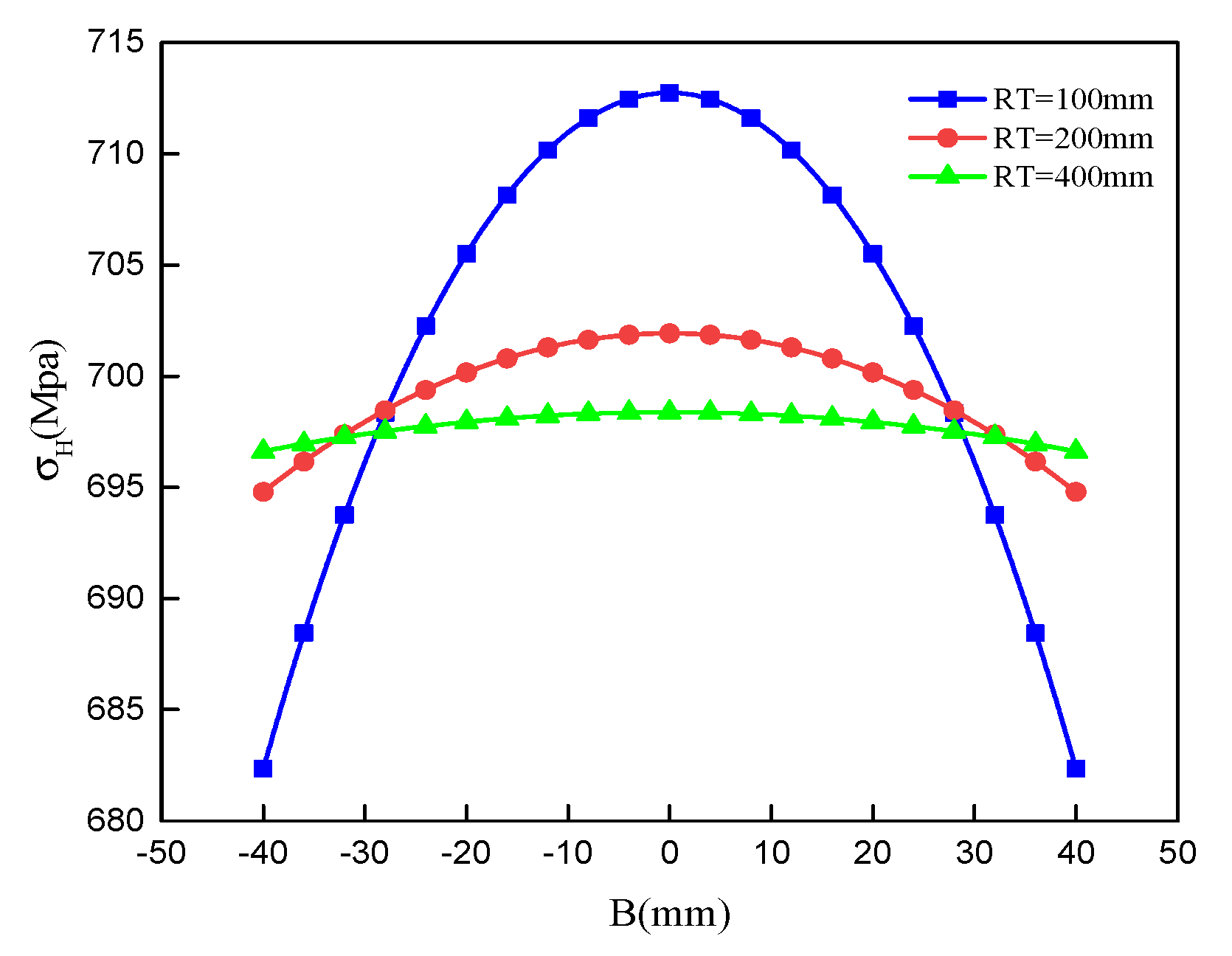
3.1. Analysis of Contact Stress
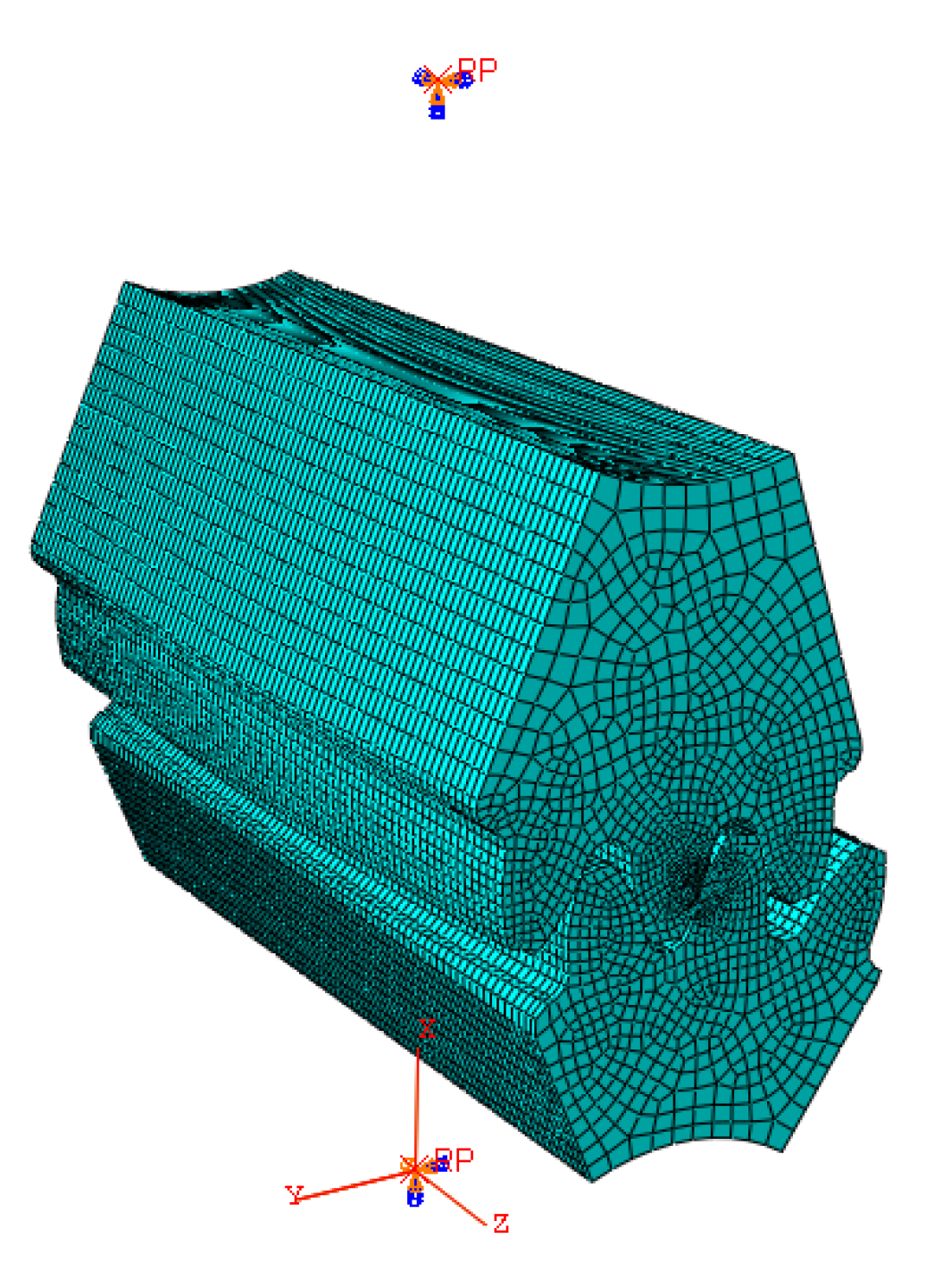
3.2. Finite Element Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mo, S.; Zhang, T. Analytical Investigation on Load Sharing Characteristics of Herringbone Planetary Gear Train with Flexible Support and Floating Sun Gear. Mech. Mach. Theory 2020, 144, 1–27. [Google Scholar]
- Lingli, C.; Tongtong, L.; Jinfeng, H.; Huaqing, W. Improvement on Meshing Stiffness Algorithms of Gear with Peeling. Symmetry 2019, 11, 1–13. [Google Scholar]
- Qin, D. Review of research on international gear transmissions. J. Chongqing Univ. 2014, 8, 1–10. [Google Scholar]
- Xiao, H.; Hou, L.; Dong, L.; Jiang, Y.; Wei, Y. Mathematical Modeling of Rotary Cutter Arc Tooth Line of Cylindrical Gear Shaped by Origin Face of Rotary Cutter. J. Sichuan Univ. Eng. Sci. Ed. 2013, 45, 171–175. [Google Scholar]
- Wang, S.; Hou, L.; Dong, L.; Xiao, H. Modeling and strength analysis of cylindrical gears with curvilinear shape teeth for manufacture. J. Sichuan Univ. Eng. Sci. Ed. 2012, 2, 210–215. [Google Scholar]
- Tang, R.; Hou, L.; Zhou, B. Modelling and strength analysis for manufacture-oriented cylindrical gear with arcuate tooth trace. Aust. J. Mech. Eng. 2016, 26, 1–8. [Google Scholar] [CrossRef]
- Qi, Z.; Rui, T.; Guang, W. Method of processing and analysis of meshing and contact of circular-arc-tooth-trace cylindrical gears. Trans. FAMENA 2016, 40, 11–25. [Google Scholar]
- Wei, Y.; Ma, D.; Wu, Y.; Luo, L.; Bai, Q.; Hou, L. Study on the tooth surface and curvature characteristics of cylindrical gear with variable hyperbolic arc-tooth-trace. Adv. Eng. Sci. 2017, 49, 196–203. [Google Scholar]
- Luo, L.; Hou, L.; Zhao, F.; Wu, Y.; Bai, Q. Analysis on geometric characteristics of cylindrical gear with variable hyperbolic circular-arc-tooth-trace. Adv. Eng. Sci. 2018, 50, 17–179. [Google Scholar]
- Wei, Y.; Yang, S.; Zhang, Q.; Wang, Y.; Hou, L. Numerical Analysis for Isothermal Elastohydrodynamic Lubrication of Cylindrical Gears with Variable Hyperbolic Circular-Arc-Tooth-Trace. Trans. FAMENA 2018, 42, 61–72. [Google Scholar]
- Wei, Y.-Q.; Ma, D.-Q.; Liu, Y.-P.; Hou, L. Research on Thermal Elastohydrodynamic Lubrication of Cylindrical Gears with Curvilinear Shaped Teeth. J. Chin. Soc. Mech. Eng. 2018, 39, 451–458. [Google Scholar]
- Tseng, R.-T.; Tsay, C.-B. Mathematical model and undercutting of cylindrical gears with curvilinear shaped teeth. Mech. Mach. Theory 2001, 36, 1189–1202. [Google Scholar] [CrossRef]
- Ma, Z.; Deng, C. CNC machining method of whole modified surface of cylindrical gears with arcuate tooth trace. J. Mech. Eng. 2012, 48, 165–171. [Google Scholar] [CrossRef]
- Zhao, F.; Hou, L.; Duan, Y. Research on the forming theory analysis and digital model of circular arc gear shaped by rotary cutter. J. Sichuan Univ. Eng. Sci. Ed. 2016, 48, 119–125. (In Chinese) [Google Scholar]
- Litvin, F.L.; Tsay, C.B. Helical gears with circular arc teeth: Simulation of conditions of meshing and bearing contact. ASME J. Mech. Transm. Autom. Des. 1985, 107, 556–564. [Google Scholar] [CrossRef] [Green Version]
- Ru, Y.W. Analysis on Contact Stress after Gear Meshing and Finite Element of Stiffness. Appl. Mech. Mater. 2015, 3752, 670–675. [Google Scholar]
- Morrish, K.; Ajay, S.R.; Amalendu, B. Stress Analysis of an Asymmetric Spur Gear Tooth with Series of Circular Hole using Finite Element Method. J. Innov. Mech. Eng. 2018, 1, 21–25. [Google Scholar]
- Litvin, F.L.; Fuentes, A.; Hayasaka, K. Design, manufacture, stress analysis, and experimental tests of low-noise high endurance spiral bevel gear. Mech. Mach. Theory 2006, 41, 83–118. [Google Scholar] [CrossRef]
- Parsons, B.N.; Walton, D.; Andrei, L.; Andrei, G. Non-standard cylindrical gears. Gear Technol. 2004, 21, 30–37. [Google Scholar]
- Fuentes, A.; Ruiz-Orzaez, R.; Gonzalez-Perez, I. Computerized design, simulation of meshing, and finite element analysis of two types of geometry of curvilinear cylindrical gears. Comput. Methods Appl. Mech. Eng. 2014, 272, 321–339. [Google Scholar] [CrossRef]
- Shuai, M.; Zhongxiang, Y. Analytical investigation on load-sharing characteristics for multi-power face gear split flow system. J. Mech. Eng. Sci. 2020, 234, 676–692. [Google Scholar]
- Sun, Z.; Hou, L.; Wang, J. Contact strength analysis of ciucular-arc-tooth-trace cylindrical gear. J. Braz. Soc. Mech. Sci. Eng. 2016, 38, 999–1005. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Pinion | Gear |
|---|---|---|
| Number of teeth | 21 | 29 |
| Modulus (mm) | 4 | 4 |
| Pressure angle (degree) | 20 | 20 |
| Tooth width (mm) | 80 | 80 |
| Cutter radius (mm) | 500 | 500 |
| Poisson ratio | 0.3 | 0.3 |
| Elasticity modulus (GPa) | 206 | 206 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Y.; Guo, R.; Liu, Y.; Dong, C.; Li, D.; Wan, A.; Zhao, G. Analytical Calculation of the Tooth Surface Contact Stress of Cylindrical Gear with Variable Hyperbolic Circular-Arc-Tooth-Trace. Symmetry 2020, 12, 1318. https://doi.org/10.3390/sym12081318
Wei Y, Guo R, Liu Y, Dong C, Li D, Wan A, Zhao G. Analytical Calculation of the Tooth Surface Contact Stress of Cylindrical Gear with Variable Hyperbolic Circular-Arc-Tooth-Trace. Symmetry. 2020; 12(8):1318. https://doi.org/10.3390/sym12081318
Chicago/Turabian StyleWei, Yongqiao, Rui Guo, Yongping Liu, Changbin Dong, Dawei Li, Anran Wan, and Gang Zhao. 2020. "Analytical Calculation of the Tooth Surface Contact Stress of Cylindrical Gear with Variable Hyperbolic Circular-Arc-Tooth-Trace" Symmetry 12, no. 8: 1318. https://doi.org/10.3390/sym12081318
APA StyleWei, Y., Guo, R., Liu, Y., Dong, C., Li, D., Wan, A., & Zhao, G. (2020). Analytical Calculation of the Tooth Surface Contact Stress of Cylindrical Gear with Variable Hyperbolic Circular-Arc-Tooth-Trace. Symmetry, 12(8), 1318. https://doi.org/10.3390/sym12081318