1. Introduction
We study the well-known one-dimensional perturbed Gelfand two-point boundary value problem (BVP) [
1,
2]
where
is the Frank-Kamenetskii parameter, or ignition parameter,
is the activation energy parameter,
is the dimensionless temperature, and the reaction term
is the temperature dependence obeying the simple arrhenius reaction-rate law in irreversible chemical reaction kinetics. It has been a long-standing conjecture [
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16] about the shapes of evolutionary bifurcation curves and the exact multiplicity of positive solutions of (1) with
In particular, Hastings and McLeod [
3] proved the bifurcation curve is S-shaped on the
plane when
is large enough. Therefore, for each
, there exist at least two positive solutions when
is sufficiently large. Brown et al. [
4] obtained a better result by finding an estimation of
Wang [
5] proved that BVP (1) has multiple solutions when
This upper bound was improved to 4.35 by Korman and Li [
6]. The most recent result about this problem is from S. Y. Huang and S. H. Wang [
8,
9], proving that BVP (1) has three solutions when
. We prove that this problem has a unique solution for
and has three solutions when
. The interval of
for BVP (1) to have three solutions for given
value is also computed with accuracy up to
It is well-known that the solutions of this problem are always even functions due to its symmetric boundary values and autonomous characteristics. Since the equation in (1) is a quasi-linear differential equation, we will find an implicit general solution of this problem first and apply the boundary values to it. Because is always true and , has only one stagnation point that must be a maximum. For developing our algorithm, we first use this property and basic calculus techniques to convert BVP (1.1) to an integral equation.
Assuming that
is the stagnation point for
, we consider the following initial value problem
Integrating the equation in (2) once, we get the following integral equation
or
Since
is the maximum, one has that
for
and
for
Hence we can write (4) as follows:
Integrating (5) again, we get the implicit solution of (2) as follows:
or
Applying the boundary conditions of (1) to (7), we get
and
It follows (8) and (9) that
and
Equation (
11) has a unique solution
C for certain values of
and
if and only if BVP (1) has a unique solution
for the same values of
and
. Furthermore, the number of solutions
C to Equation (
11) is corresponding to the number of solutions of BVP (1) for the given values of
and
. In the following sections, we investigate the values of
,
and
such that (11) has a unique solution when
and
and has three solutions when
and
In
Section 2, we prove that BVP (1) has three solutions when
for some values of
and provide the graphical solutions for some values of
and
. In
Section 3, we prove that there is a positive number
such that BVP (1) has a unique solution for all values of
and
Based on the results in
Section 2 and
Section 3, an
must exist. We prove that
is between
and
in
Section 4. In
Section 5, we calculate and draw a graph that displays a region of
and
in which BVP (1) has three solutions. This region shows a clear relationship between
,
and
We also draw the two corresponding solutions when
is exactly the maximum or minimum of
The article is concluded at
Section 6.
2. Three Solutions of BVP (1), Their Graphical Representations and the
Corresponding Interval when
As we have explained in the previous section, we will work with Equation (
11). All the calculations in this article use 32 bit precision.
Since numerical computation of double integrals is time-consuming and also causes large errors, we first convert the left-side of (11) into a single integral. In fact, this is a crucial move for this computation to be possible. Using power series expansion, we have
where
and
Putting (12) into (11), we have
When
w approaches
C, the denominator of the integrand in (15) approaches 0, which causes very large error of the computation. To overcome this problem, we use (12) and integrate by parts to get
Putting (16) into (15), we have
where
It follows (11) that
for
and
Therefore, Equation (
17) has at least one solution for any
, and whether Equation (
17) has multiple positive roots depends on the number of extreme values of
and the value of
If
has one maximum and one minimum, and
is between them, (17) must have three roots. If
is exactly the maximum or minimum of
(17) has exactly two roots (the horizontal line at value
meets the curve of
at this maximum point and also cuts the curve at a point to the right of the maximum point, or meets the curve of
at this minimum point and cuts the curve at a point to the left of the minimum point). Otherwise there is only one root.
Due to the fact that
is a function with an integral, it is difficult to find the extremum by analysis. We now use numerical method to find the extrema, or stagnation points of
Let
where
Taking out the common factor, we consider the following equivalent equation of (19):
where
We will find the roots of (21) by Newton’s method with the following iteration formula:
where
We implemented our algorithm using Mathematica to compute the x values where the extremum values occur and the corresponding extremum values of for several values of nearby and greater than 4, and results are recorded in the following table.
Table 1 shows that when
gets closer and closer to 4, the two extremum points of
get closer and closer, with the extremum points converging to a value between
and
and the extremum values converging to a value between
and
When
and the value of
is between
and
where
and
are the minimum value and the maximum value of
, respectively, Equation (
17) has three roots, which are separated by the extreme points. When
changes from
to
and
or
is very small and the allowable error decreases from
to
which means that
decreases from
to
as
decreases from
to
when we set
in our numerical calculation. This is almost impossible if
is chosen randomly, but we can manage to work it out by selecting
When
we use Newton’s method and the Mathematica language to find the roots of (17) by choosing
i.e.,
. The iteration formula here is as follows:
where
and
are calculated with (18) and (20), respectively. For several values of
that are near and greater than 4, we performed some computation. The range of each
in this table is the value of
for which Equation (
17) has three roots with the corresponding value of
The three roots in the table are the roots of Equation (
17) corresponding to the given values of
and
Our results are recorded in the following table.
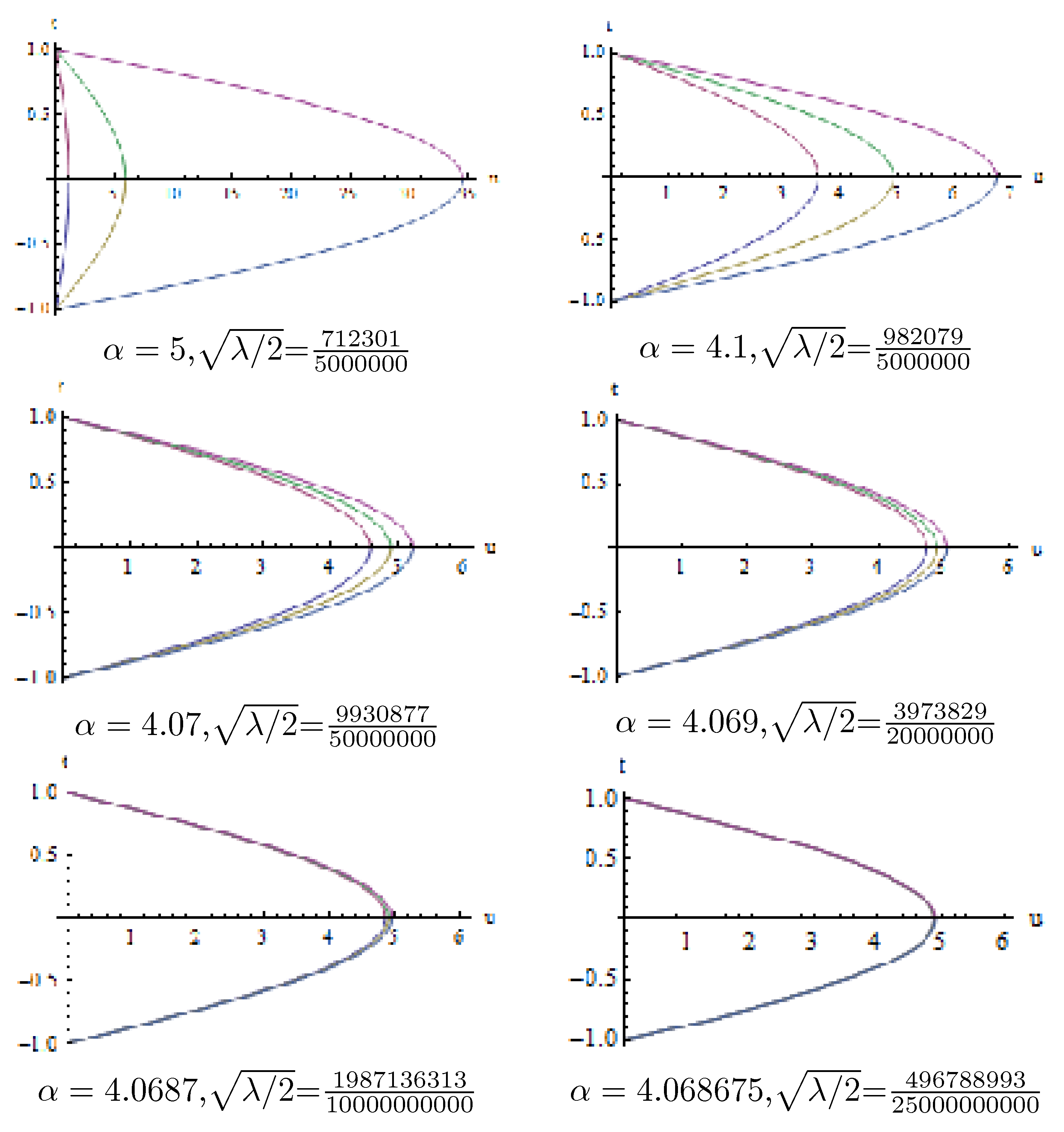
Remark 1. When Table 2 shows that if we take λ for to be between the maximum and the minimum of , for x near the three roots. In fact, Newton’s method does not work for finding the roots of (17) in this case so we have to switch to the dichotomy method. is taken as a fraction for ensuring the accuracy of calculation, otherwise it is difficult to get the three roots in high precision. This method is also used in the following drawings. To draw the solution curve of BVP (1) by using the inverse function mapping method, we rewrite Equation (10) as follows: We use some internal functions of Mathematica to draw the three solutions of BVP (1) corresponding to the first six sets of data from
Table 2 and present them in
Figure 1. It is difficult to distinguish the solutions of BVP (1) graphically corresponding to the last two sets of data in
Table 2 because the maximum values of the solutions approaches 4.89.
3. The Interval of for BVP (1) to Have a Unique Solution
It is easy to prove the following lemma.
Lemma 1. Let Then the function , has the following properties.
(1). and .
(2). When , it is decreasing over .
(3). When it has a local minimum at and a local maximum at
(4). When , is increasing and
First we refine the idea of Brown, Ibrahim and Shivaji [
4]. Let
. Then, Equation (
11) can be written as
Now, we denote the left side of (27) by
and take its derivative with respect to
where
For the solution of BVP (1) to be unique, we need
to be monotone. We take the derivative of
with respect to
Therefore,
when
and
and in turn we have
for all
and
Therefore, Equation (
27) or BVP (1) has a unique solution when
.
The integrand of an integral does not need to be always nonnegative for the integral to be nonnegative. Heuristically, we should be able to get
if the function
in the integral of (28) is negative in a “small” interval. That means we should be able to allow
to pass the value 4 for some “small” interval for Equation (
27) or BVP (1) to have a unique solution. Based on this heuristic idea, we give the following theorem.
Theorem 1. There exists an such that for all and
Proof. Since we only need to consider the behavior of
for all
in a neighborhood of
we may assume that
First, we expand the integrand of the integral expression in
around
Assume that
and
for a constant
and
or BVP (1) has three solutions for all values of
. The existence of constant
b is guaranteed by the fact that
must change to positive from negative at some value of
x because Equation (
11) has three solutions. First, we break the integral expression of
into three parts:
Since the integrand of is of order at and it is defined over closed intervals for and there is a positive constant such that Since we can take such that when Now, we can choose a small enough such that As we know that we can choose an such that for all which implies that This is clearly a contradiction and the proof of the Theorem is complete. □
Remark 2. Theoretically, our next step is to prove that if when α is close to Because we do have difficulties to do this analytically, we now use our numerical result in Table 1 for help. The data in table one shows that the maximum point of or increases from and the minimum point of or decreases from when the value of α decreases from . Thus the numerical result shows that the interval of x in which must start with a number larger than . Applying this result to above theorem, it shows that there is a positive value ϵ such that BVP (1) has a unique solution for all 4. The Value of
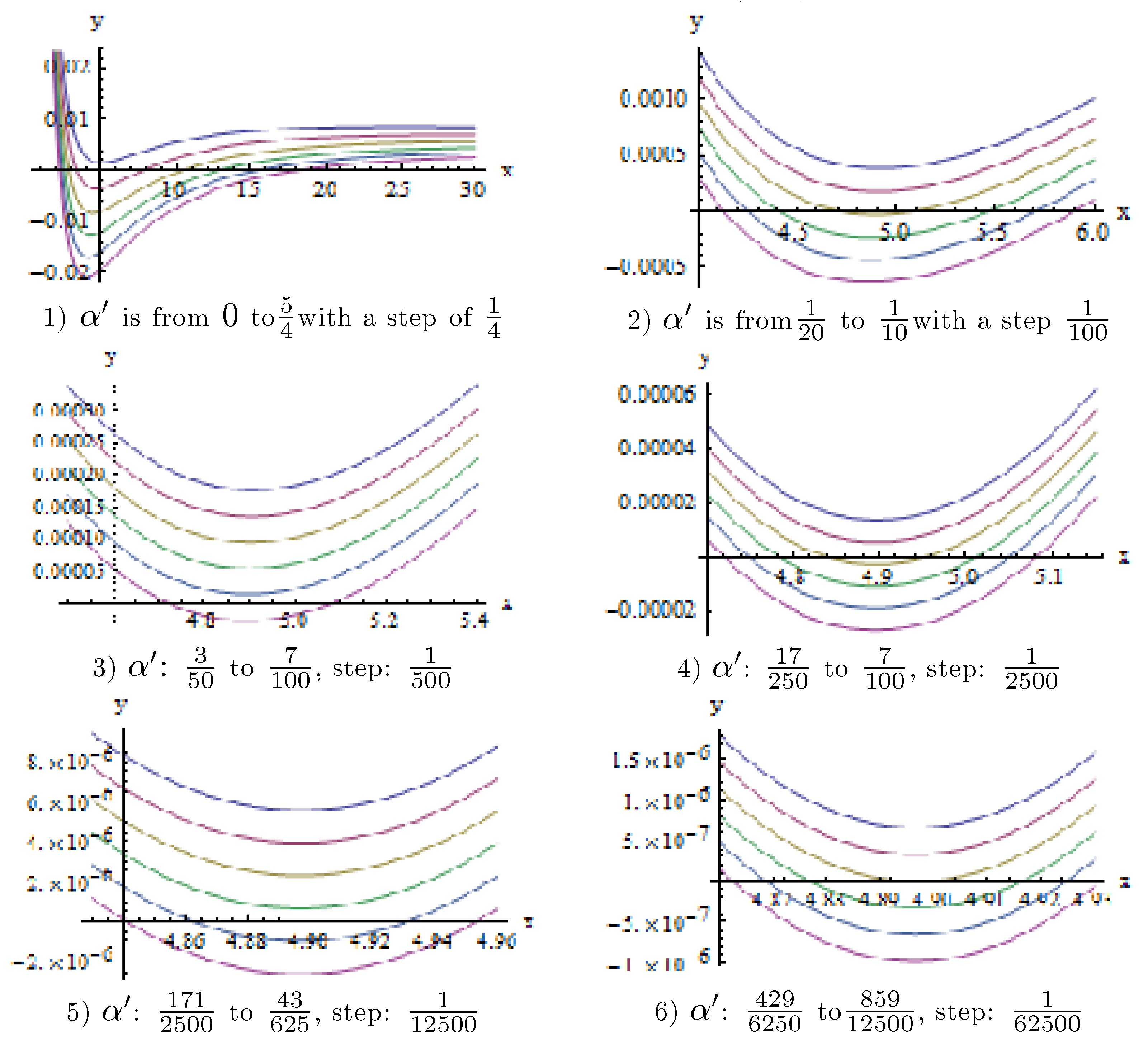
Now we get back to Equations (19) and (20) and use some internal functions of Mathematica and our algorithm to draw the graphs of
for several values of
and present them in
Figure 2.
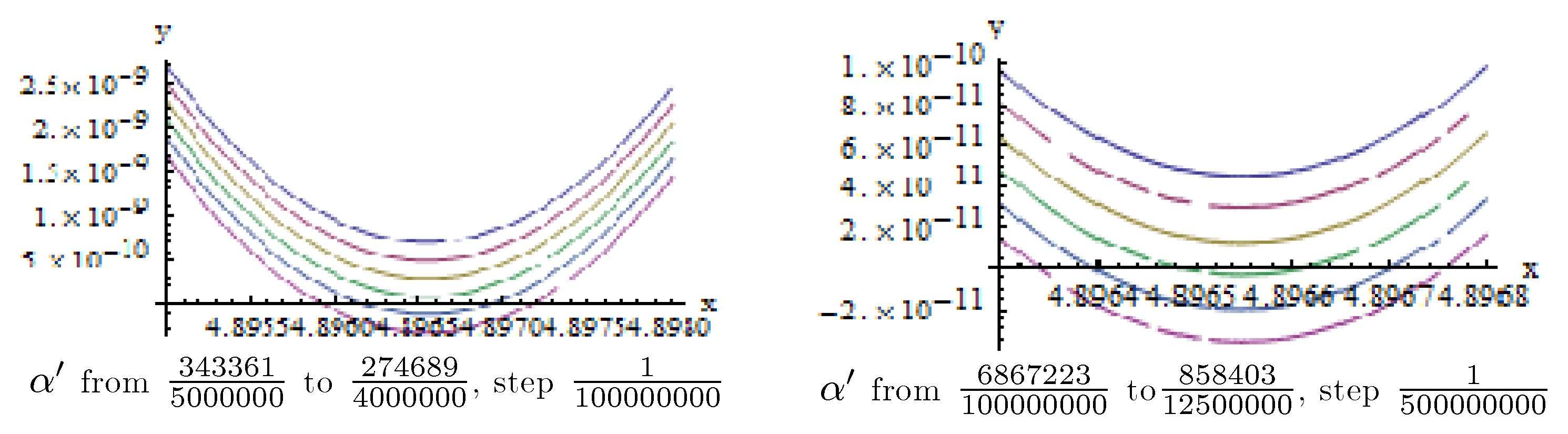
In these sets of graphs, the graph of moves down one curve as increases one given step. From these figures, we can see that is above the x axis entirely and therefore the function increases monotonously on when or increases above some points. We can clearly see that the third curve () from the top of set (6) is almost tangent to the axis, based on which we may claim that For getting a clear view, we refine the graph of for the value of between and .
From the left set of
Figure 3, one can clearly see that the second graph from the bottom intersects the
x-axis, and the third graph is above the
x-axis, which shows that
The right set of
Figure 3 shows that the third graph from the bottom intersects the
x-axis, and the fourth curve is above the
x-axis, which shows
Now, we can conclude that the value of
is between
and
for BVP (1) to have a unique solution when
and three solutions when
As we have mentioned earlier, the distance between the three solutions is within
even if there are three different solutions when the value of
is less than
We can reasonably say that BVP (1) has a unique solution when
for practical purposes.
5. Multiple Solution Region Determined by and
When
and
Equation (
17) has three roots, and in turn BVP (1) has three solutions. We want to draw the curves of
and
by curve fitting for displaying the dependence of the values of
and
. Because the data in
Table 1 are not enough for fitting these two curves, we use Mathematica language and our algorithm to generate more data in addition to those in
Table 1, and record it in
Table 3 below.
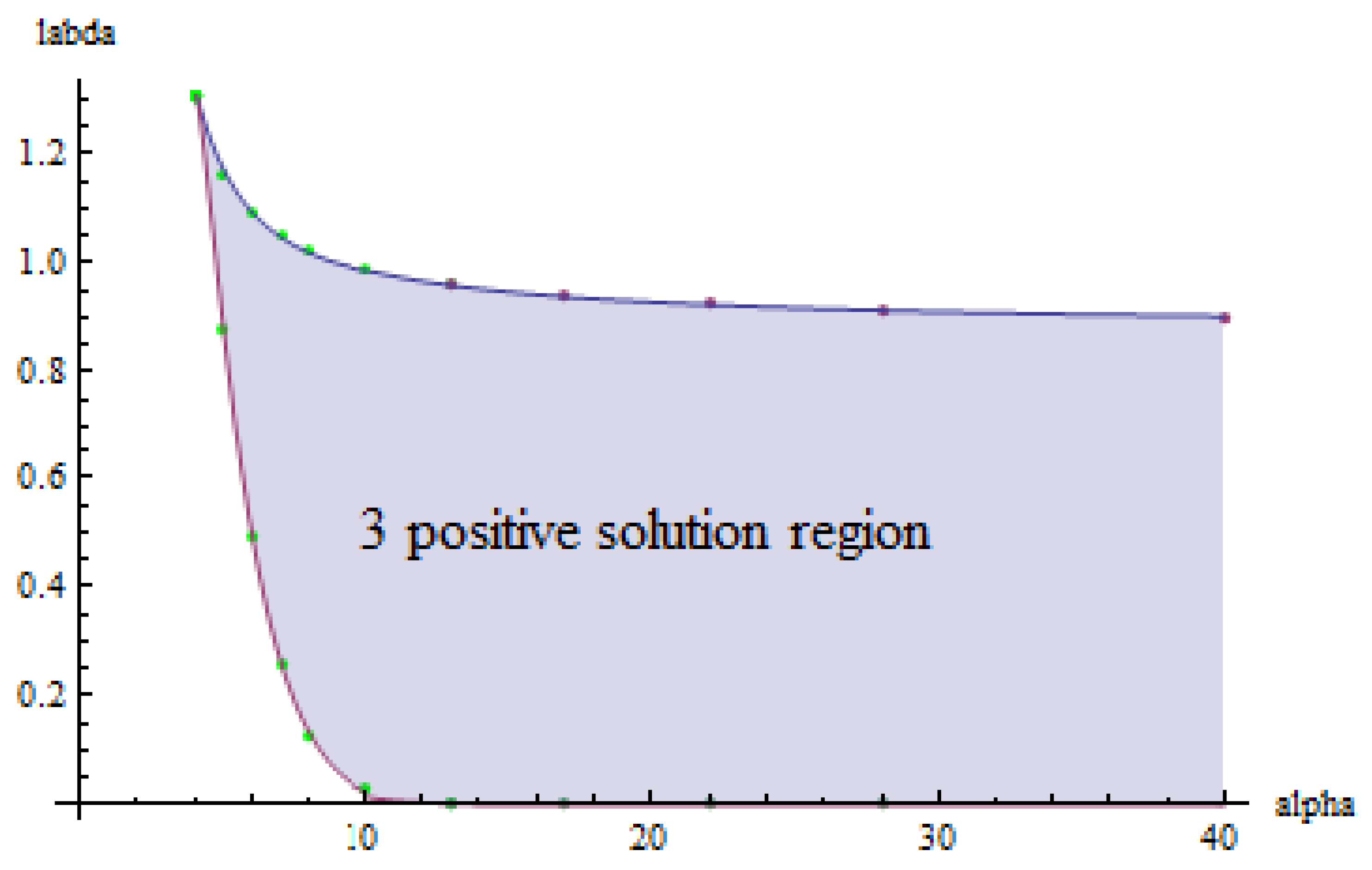
Using some internal functions of Mathematica and the data in
Table 1 and
Table 3, the curves of
and
are fitted out in
Figure 4,
where
and
Figure 4 shows a clear relationship of the values of
and
for BVP (1) to have three solutions.
When
or
Equation (
17) has only one root, thus BVP (1) has a unique solution. When
or
Equation (
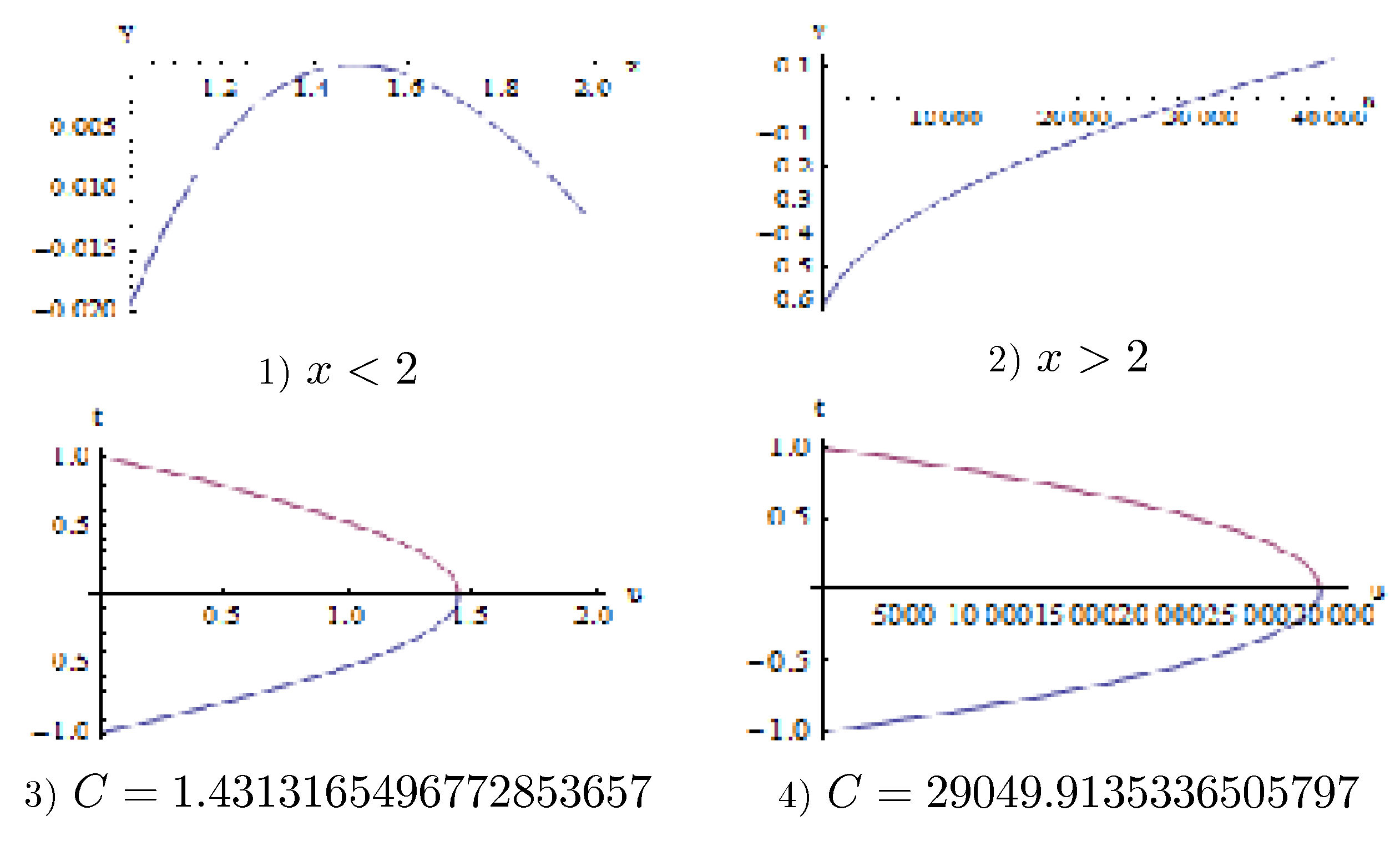
17) has two roots, thus BVP (1) has two solutions. Now, we try to graph the two solutions corresponding to some values of
and
Let
the two roots of Equation (
17) are
and
Using the values of
and
we get the corresponding solutions of BVP (1) using (26). Their images are shown in
Figure 5 with the corresponding graph of
above them.
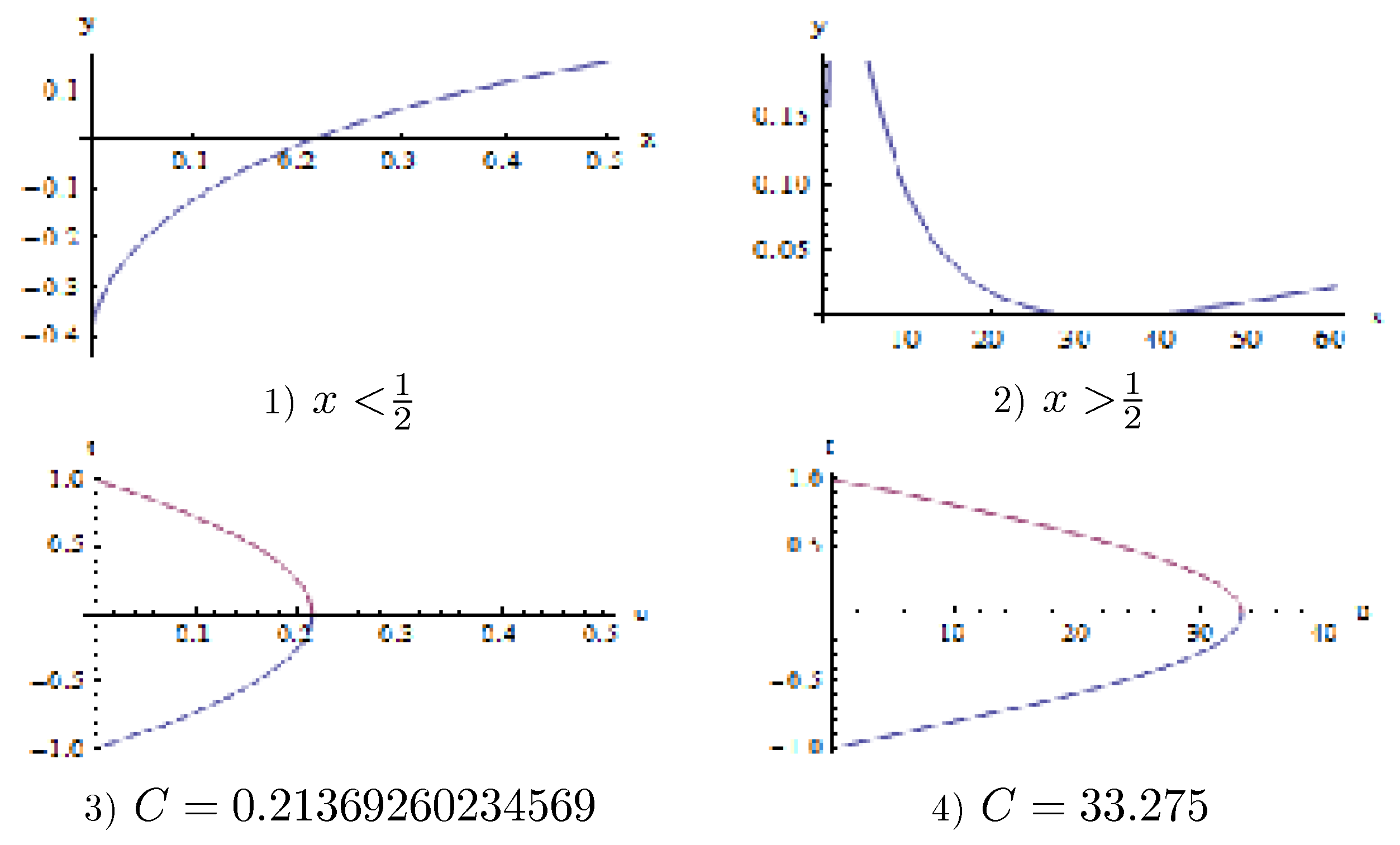
Let
the two roots of Equation (
17) are
and
Using these values of
and
we get the corresponding two solutions of BVP (1) using (26). Their images are shown in
Figure 6 with the corresponding graph of
above them.
It can be seen from (2) in
Figure 6 that the function
changes gently near the minimum point. If
deviates slightly, it will enter the three positive solution region or the unique solution region. Therefore, it is quite challenging to find two positive solutions in the lower boundary of the three positive solution region.
6. Conclusions
In this article, we studied the well-known one-dimensional perturbed Gelfand two-point boundary value problem (1). We first converted it to equivalent integral representation (11). By reducing (11) to a single integral and combining Newton’s method with the dichotomy method, we developed a very efficient algorithm with high precision for computing the values of
and
such that this problem has a unique solution when
and
and has three solutions when
and
Our result improves the the existing result by Huang and Wang [
8,
9] from
to
This improvement of approximation is essential for finding the exact value of
in future works. We also used a separate section to prove that there is a positive number
such that BVP (1) has a unique solution for all values of
and
Once the value of
is found, finding the values of
and
becomes necessary. We used our algorithm to approximate these values with accuracy up to
corresponding to a few values of
A region illustrating the dependence of the values of
and
is graphed. Hopefully, this pattern of dependence can help future researchers to figure out the precise dependence of these values. During the revision process of this article, we have noticed that the method of optimal fourth order multiple root solvers without using derivatives developed by Sharma, Kumar and Jäntschi [
16] may be applied to this problem. We will certainly explore this alternate route and try to improve our result further in our future work.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}