
A Prediction Method with Altering Equivalent Stiffness for Damping Evaluation of Shrouded Bladed Disk Dynamic Systems


Abstract
:1. Introduction
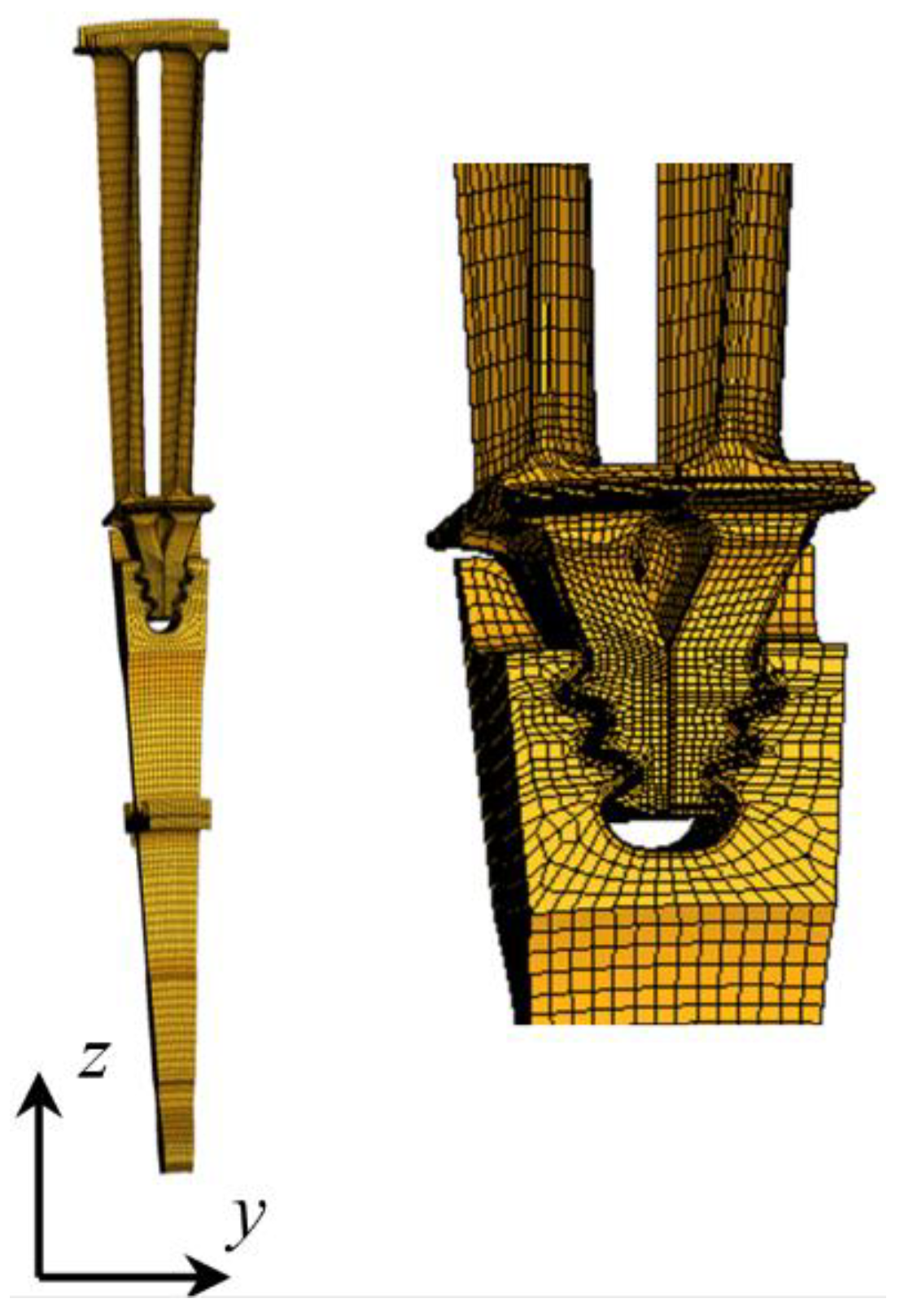
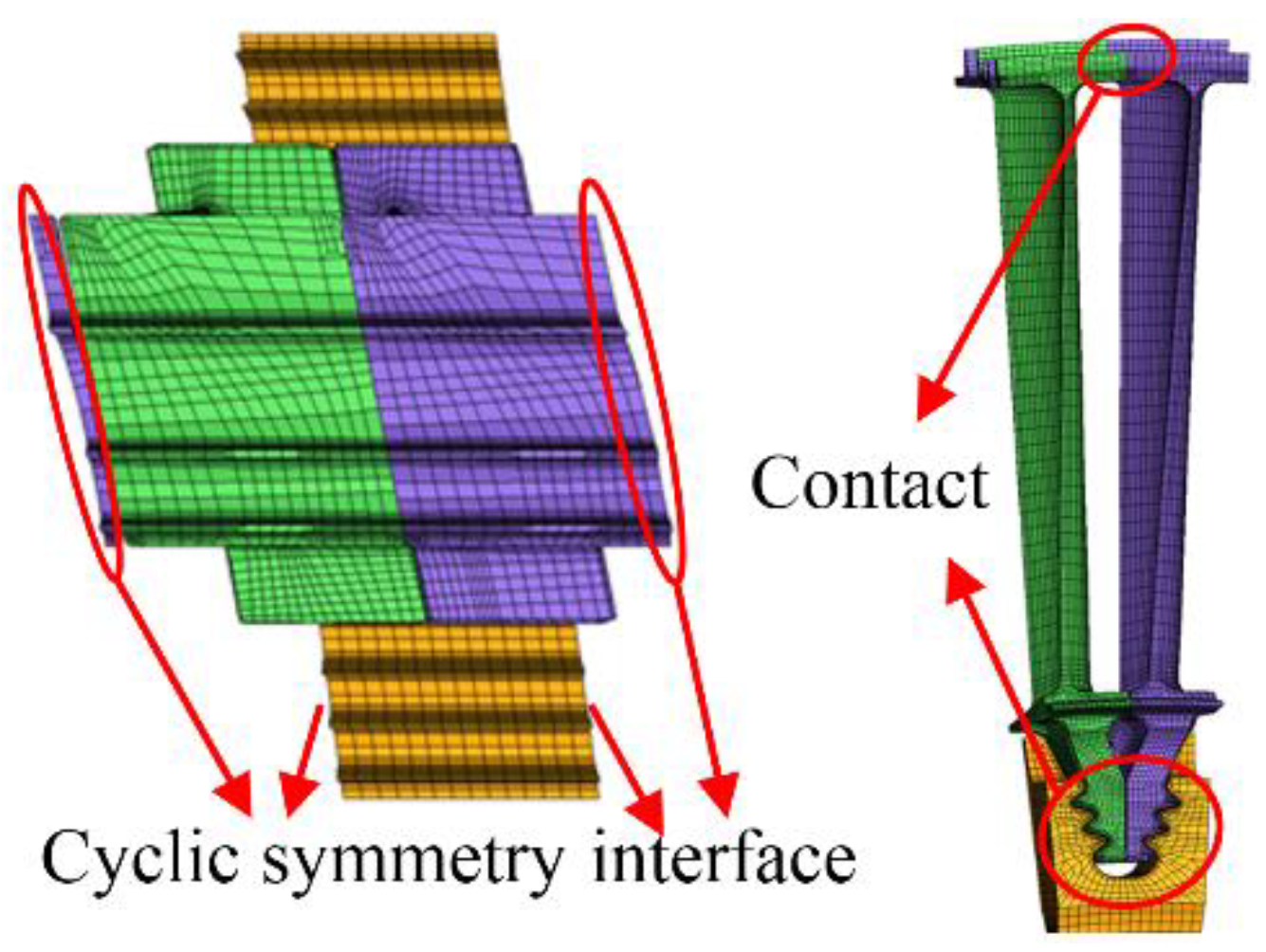
2. Dynamic Model of Shrouded Bladed Disks with Contact
2.1. Equation of Motion
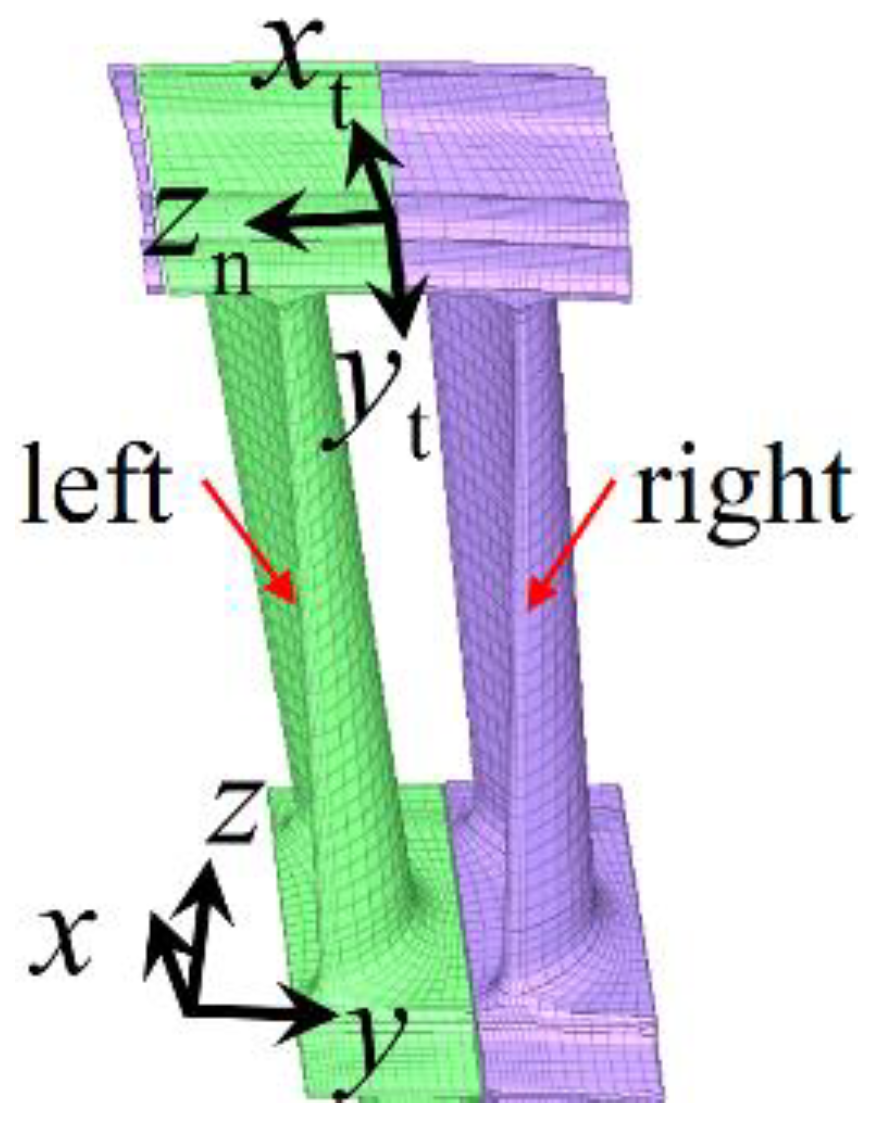
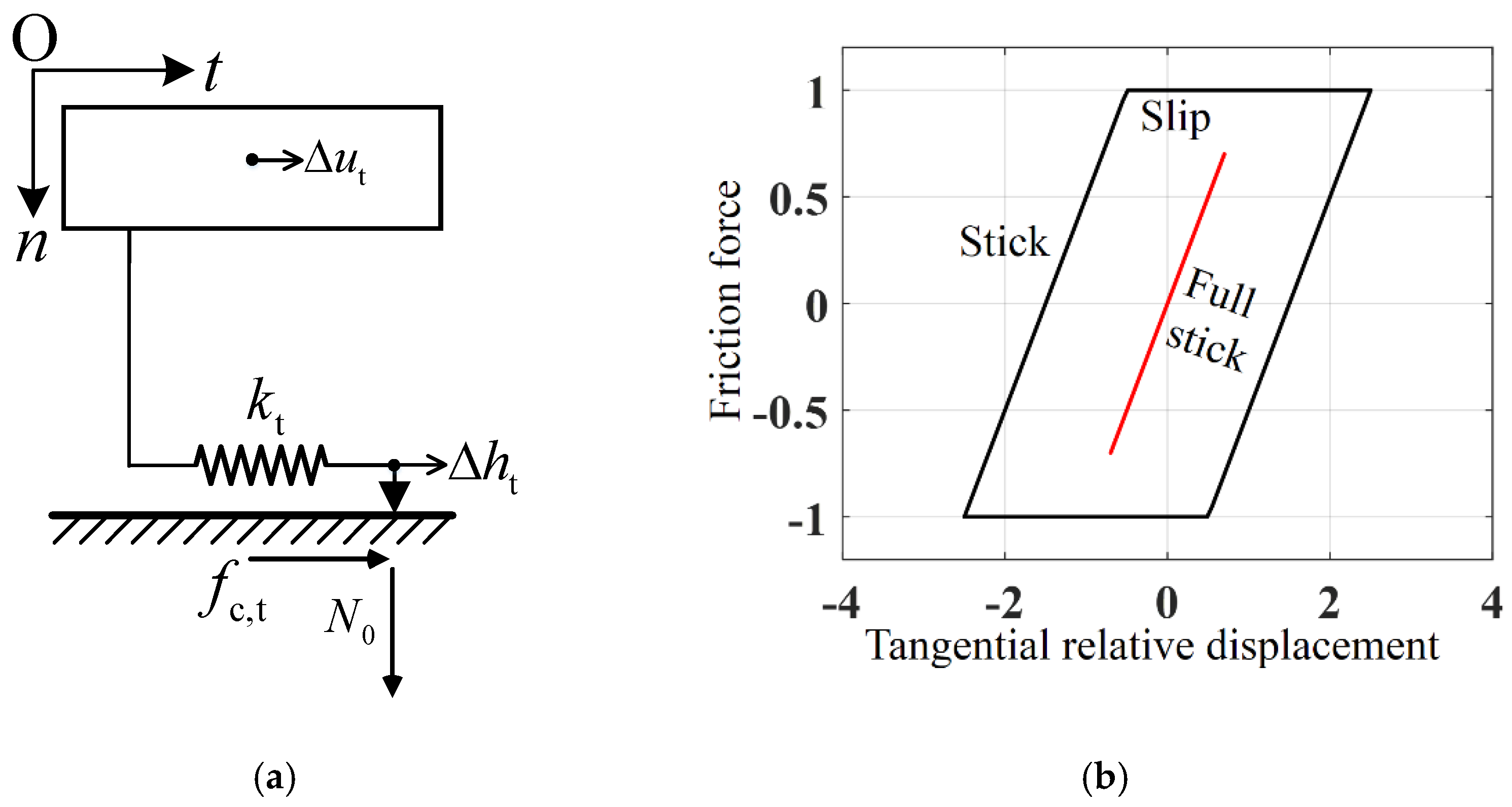
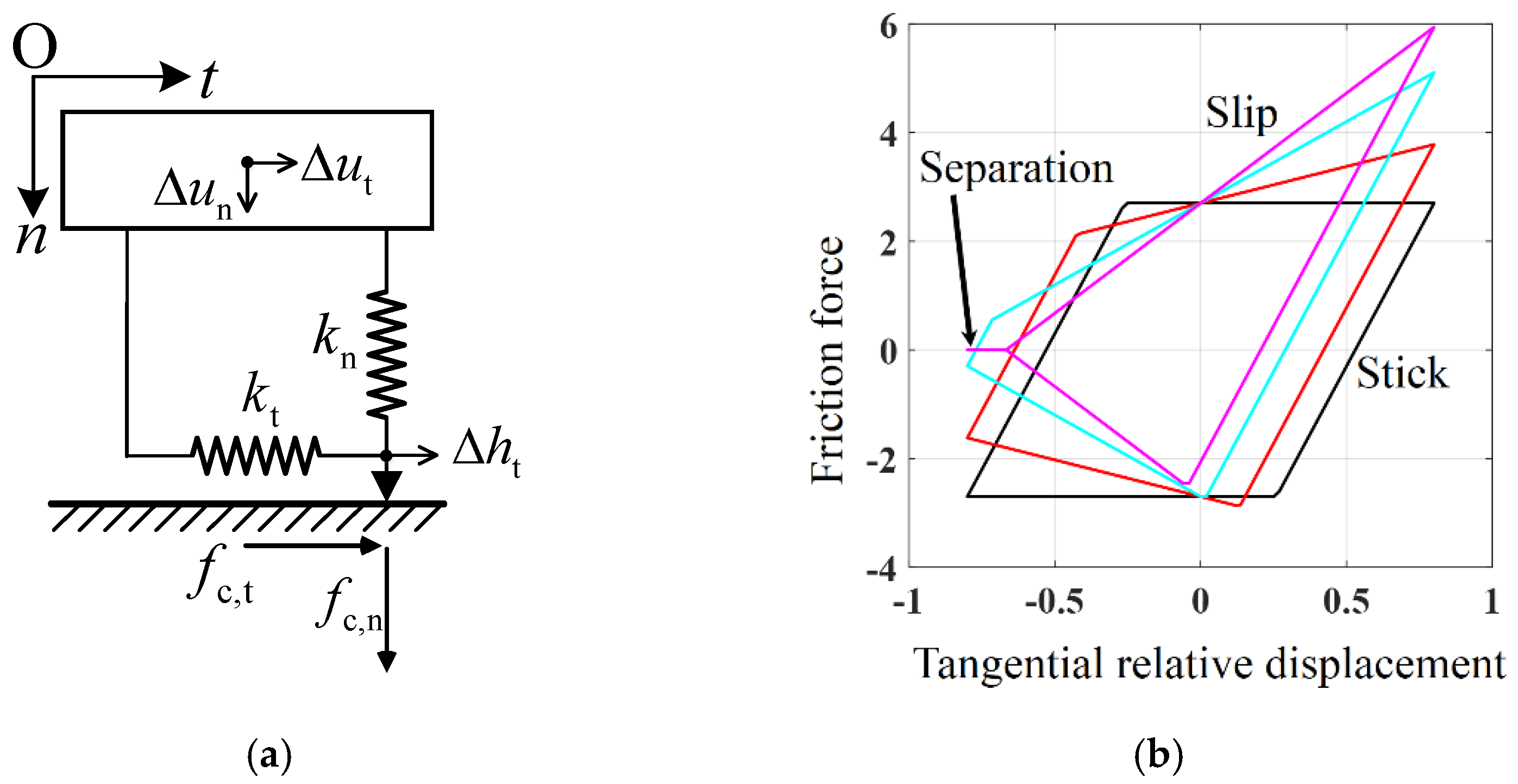
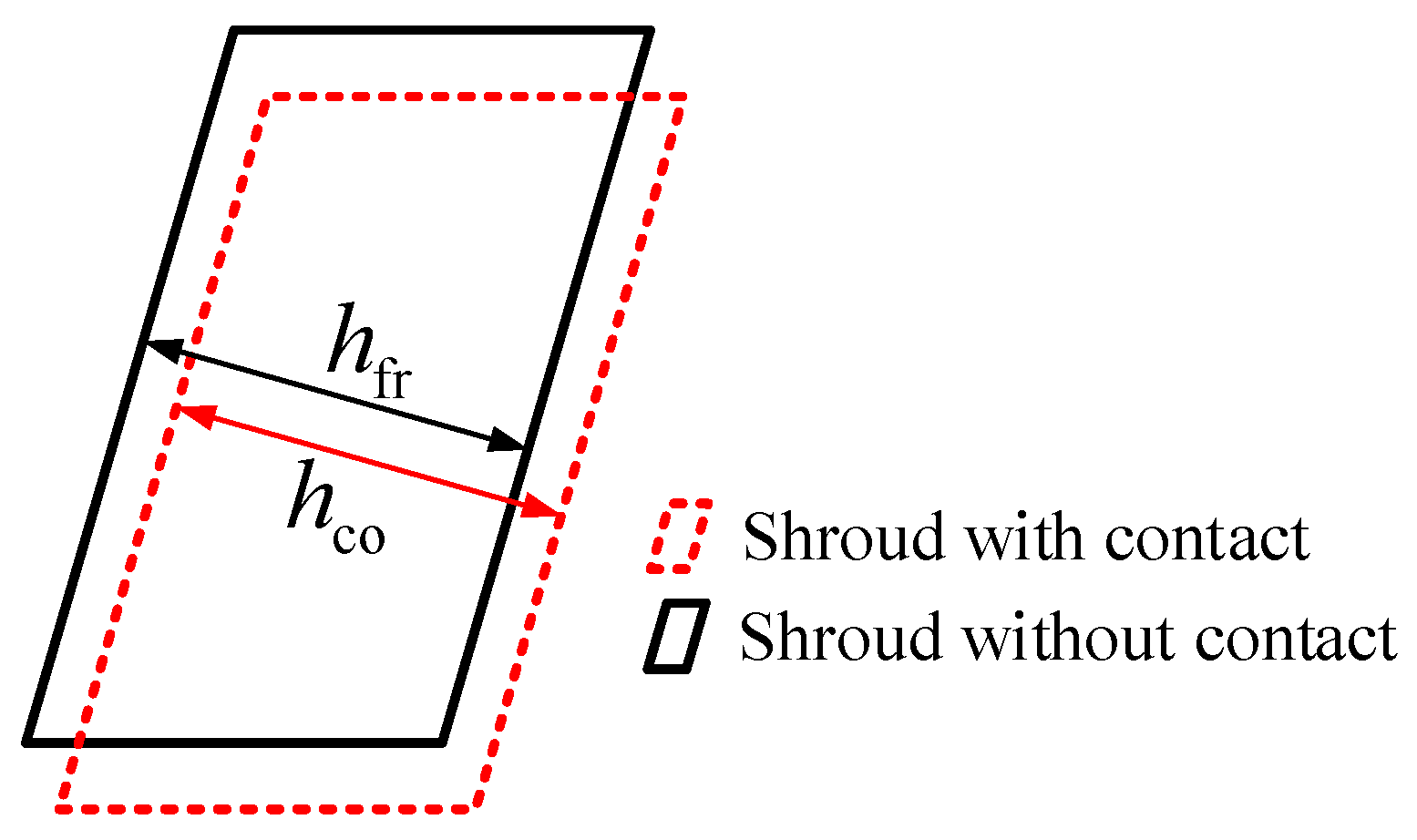
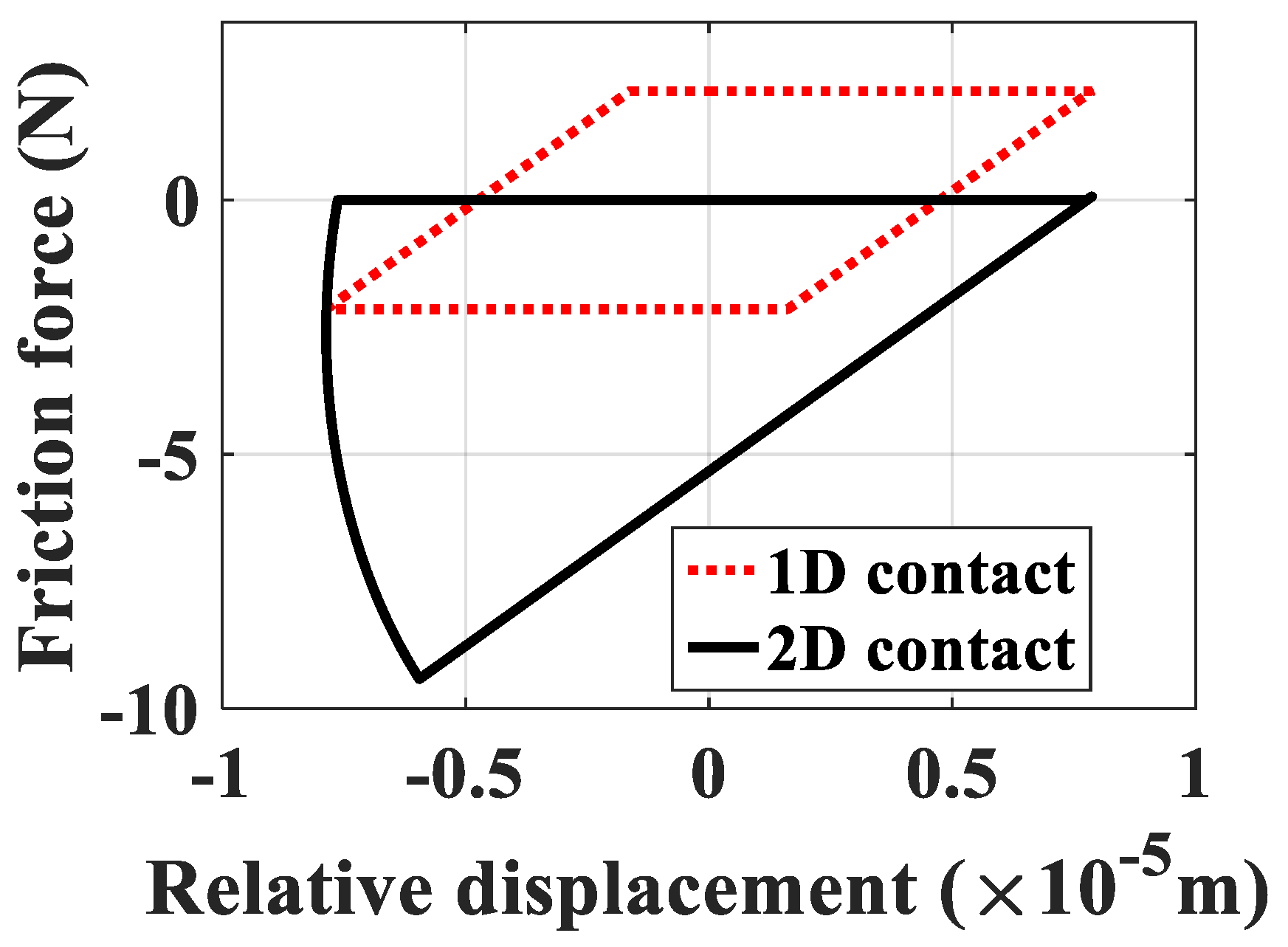
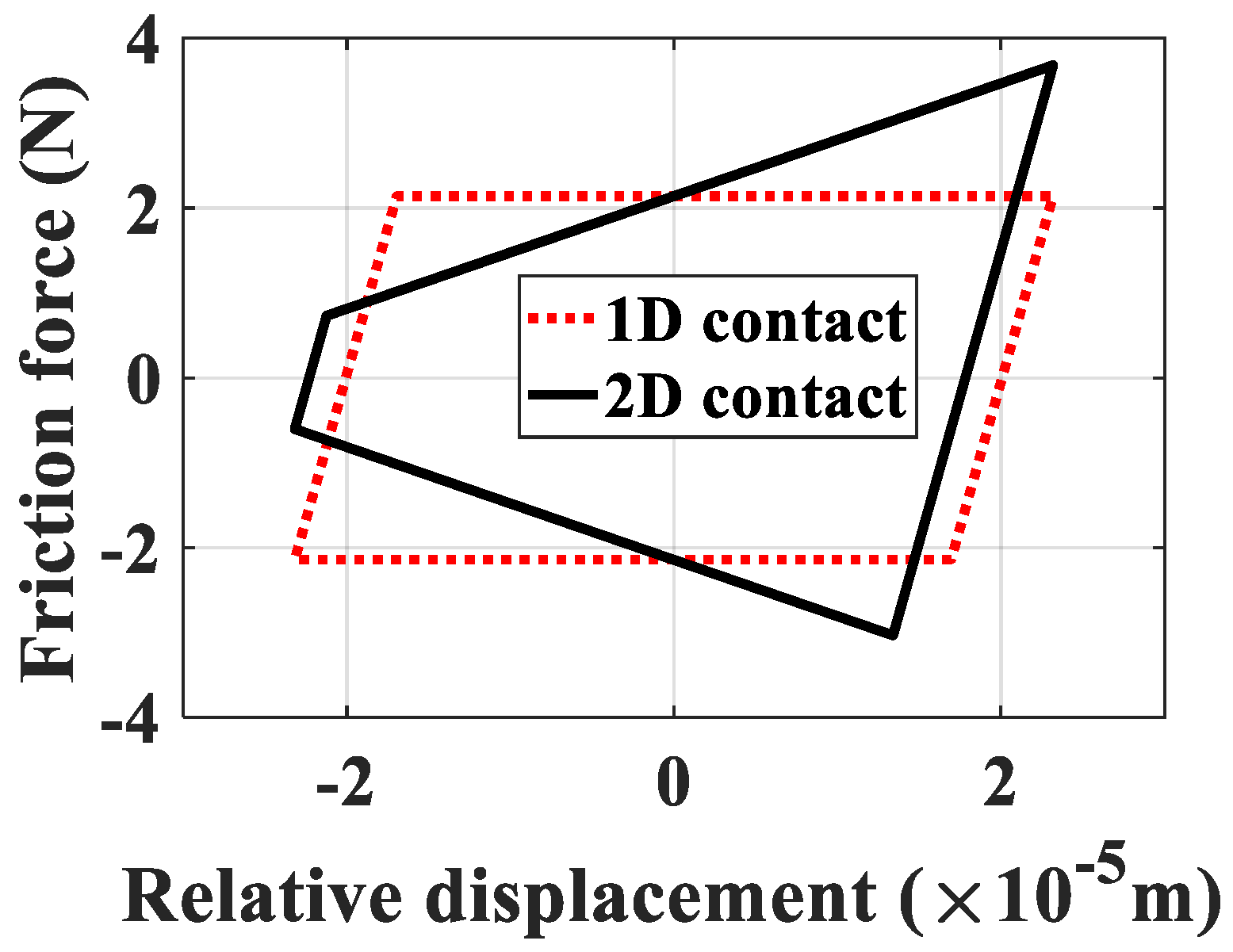
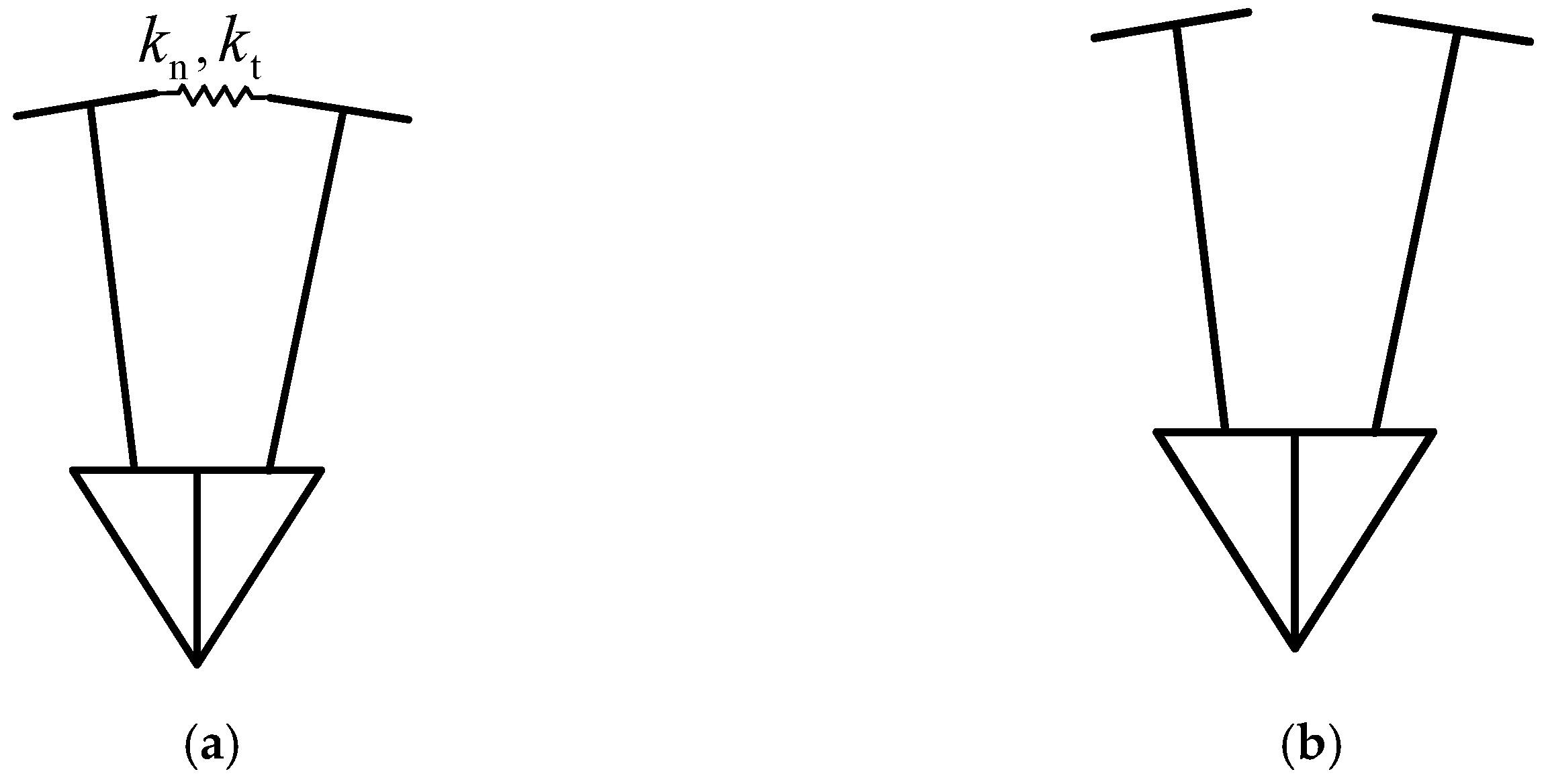
2.2. Contact Model
2.3. Equivalent Stiffness of the Shroud Contact
3. Equivalent Damping Analysis
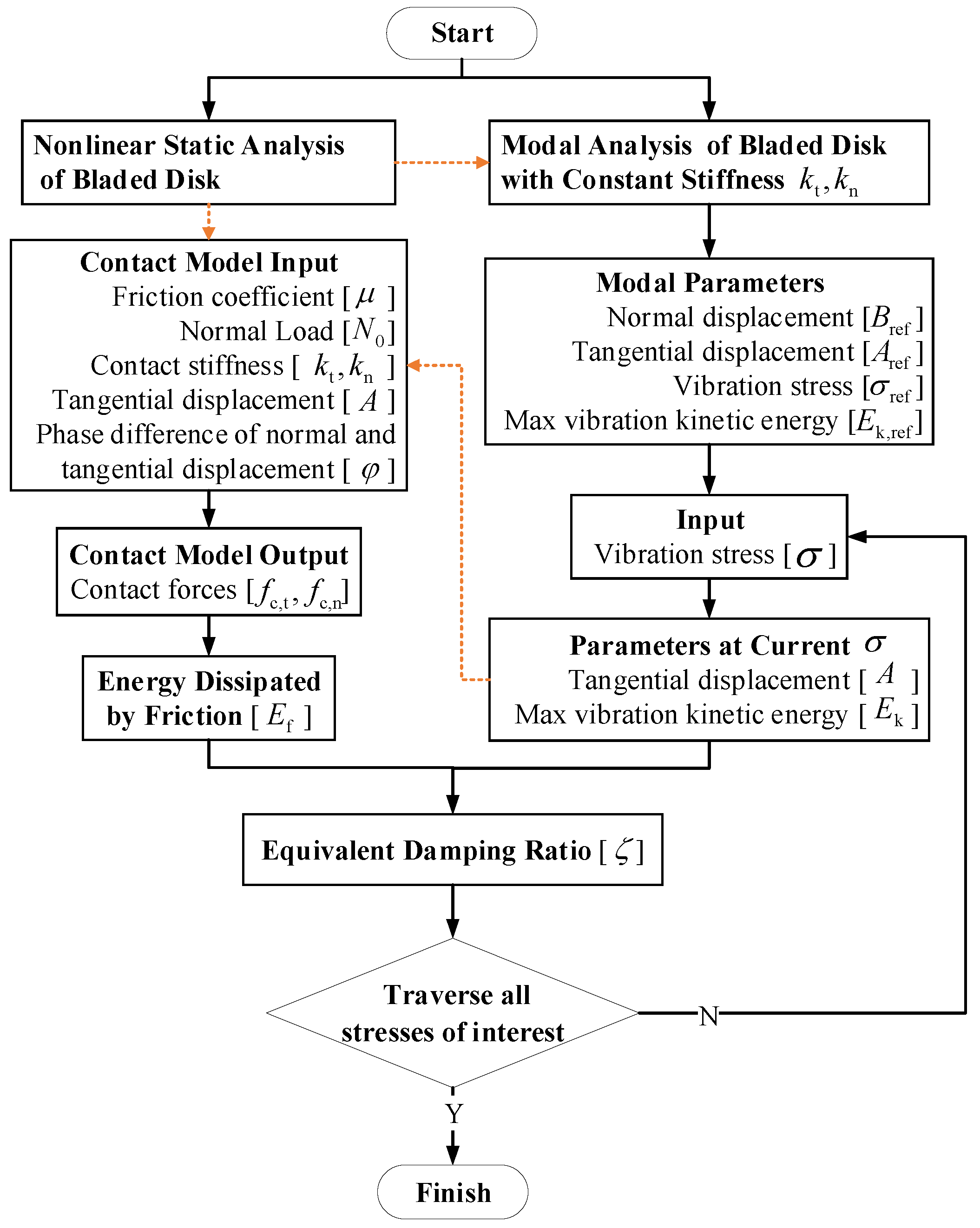
3.1. Calculation Method of Equivalent Damping Ratio
3.2. Parameters for Damping Evaluation
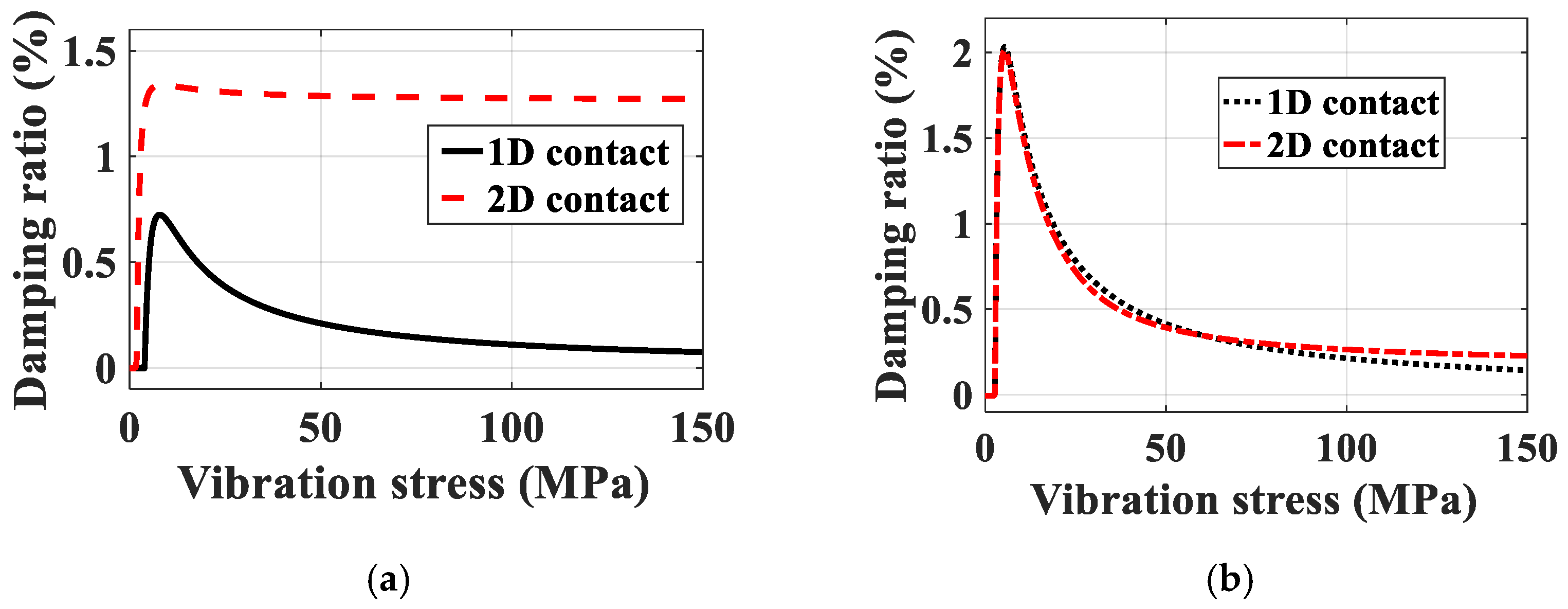
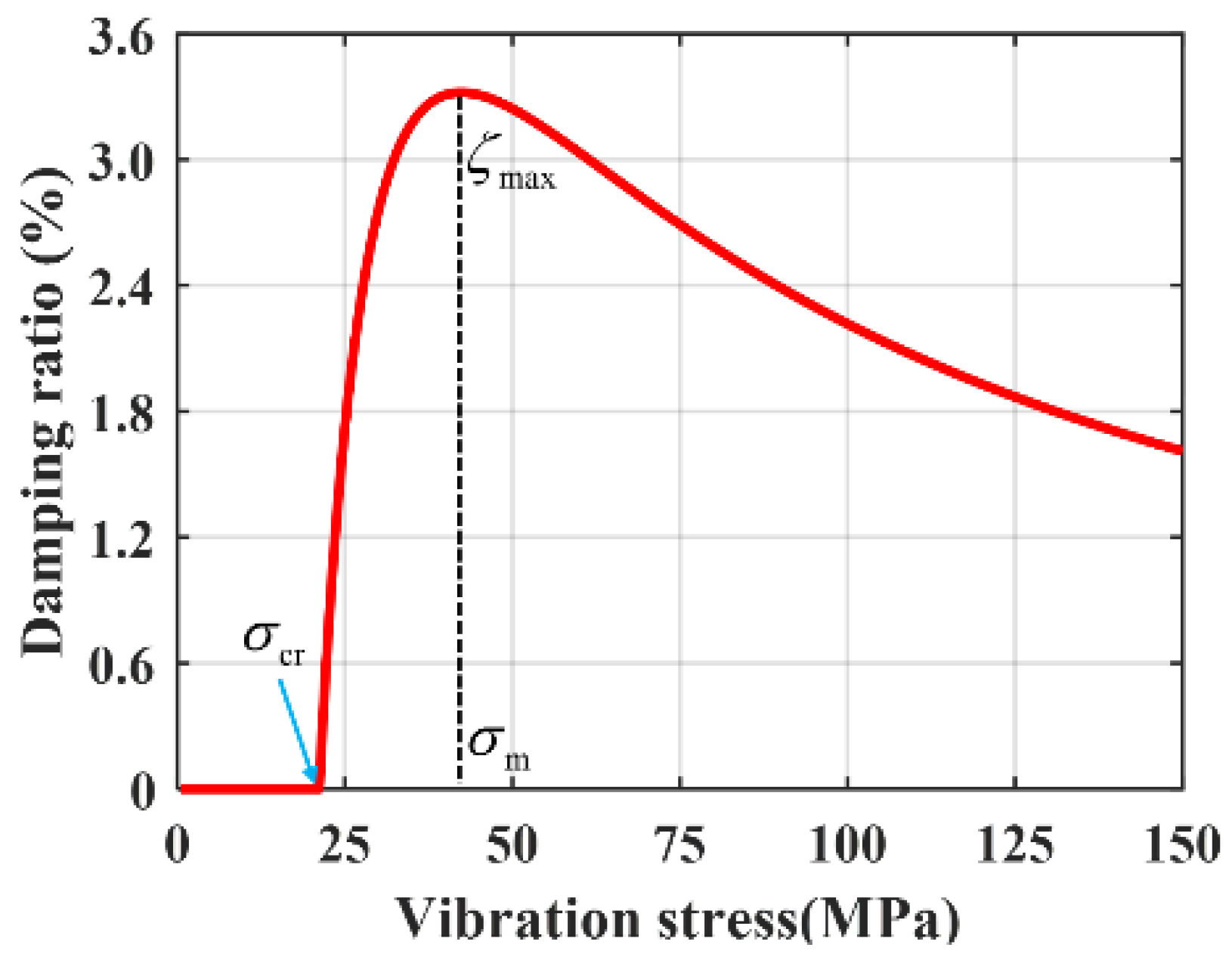
3.3. Damping Characteristic Curve
4. Damping-Evaluation with Altering Equivalent Stiffness
4.1. Equivalent Stiffness on the Displacement Amplitude with the Separation
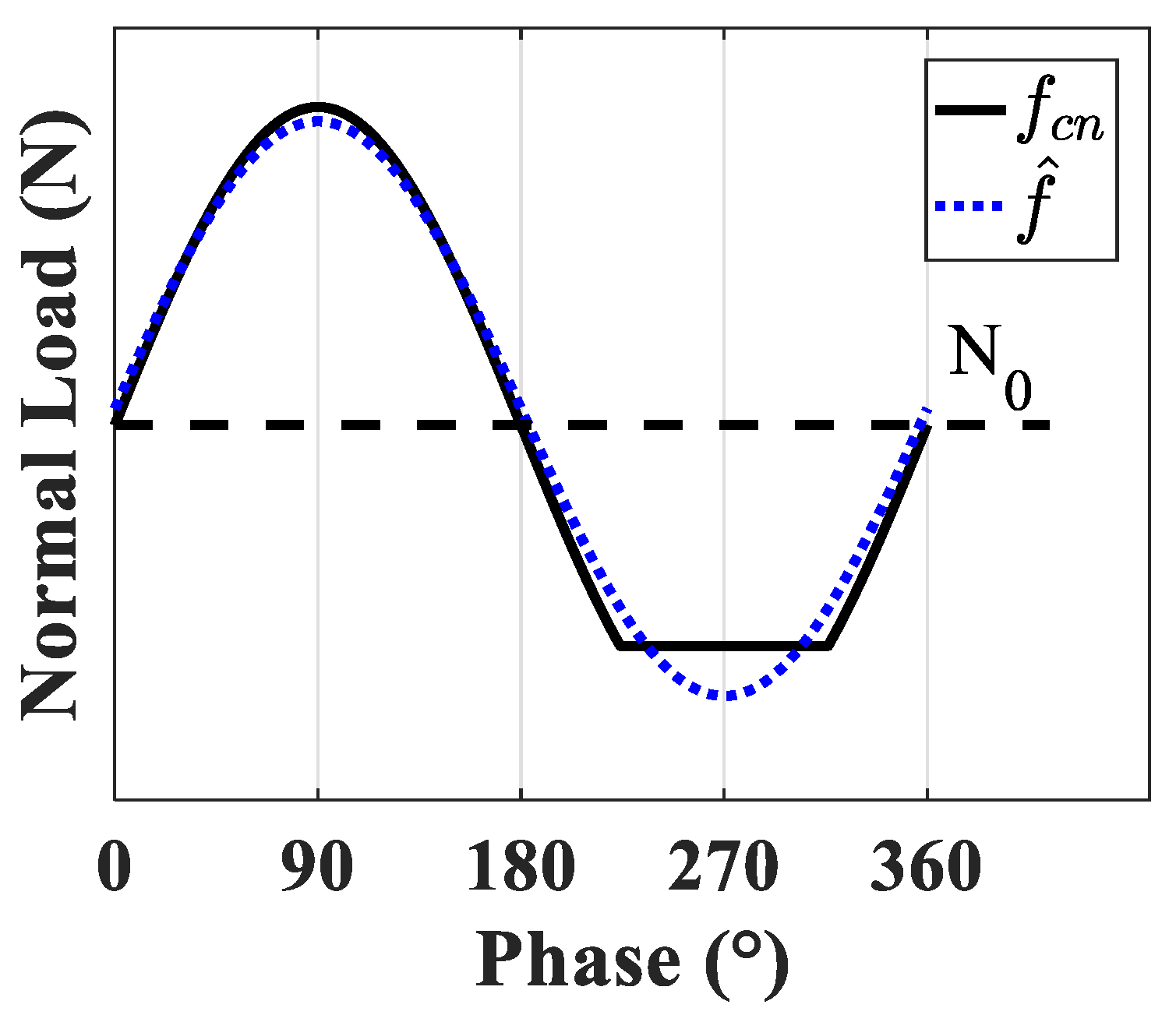
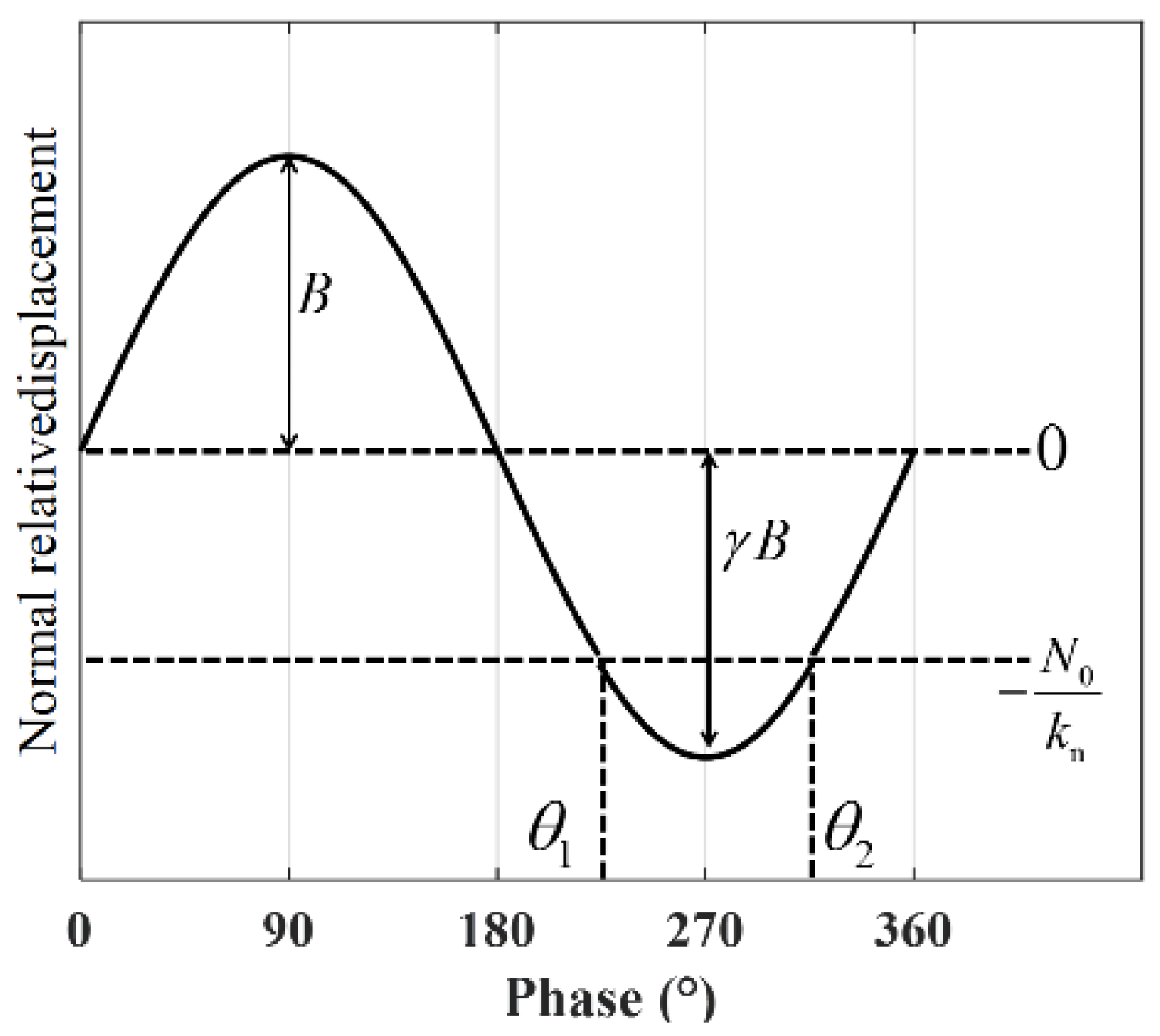
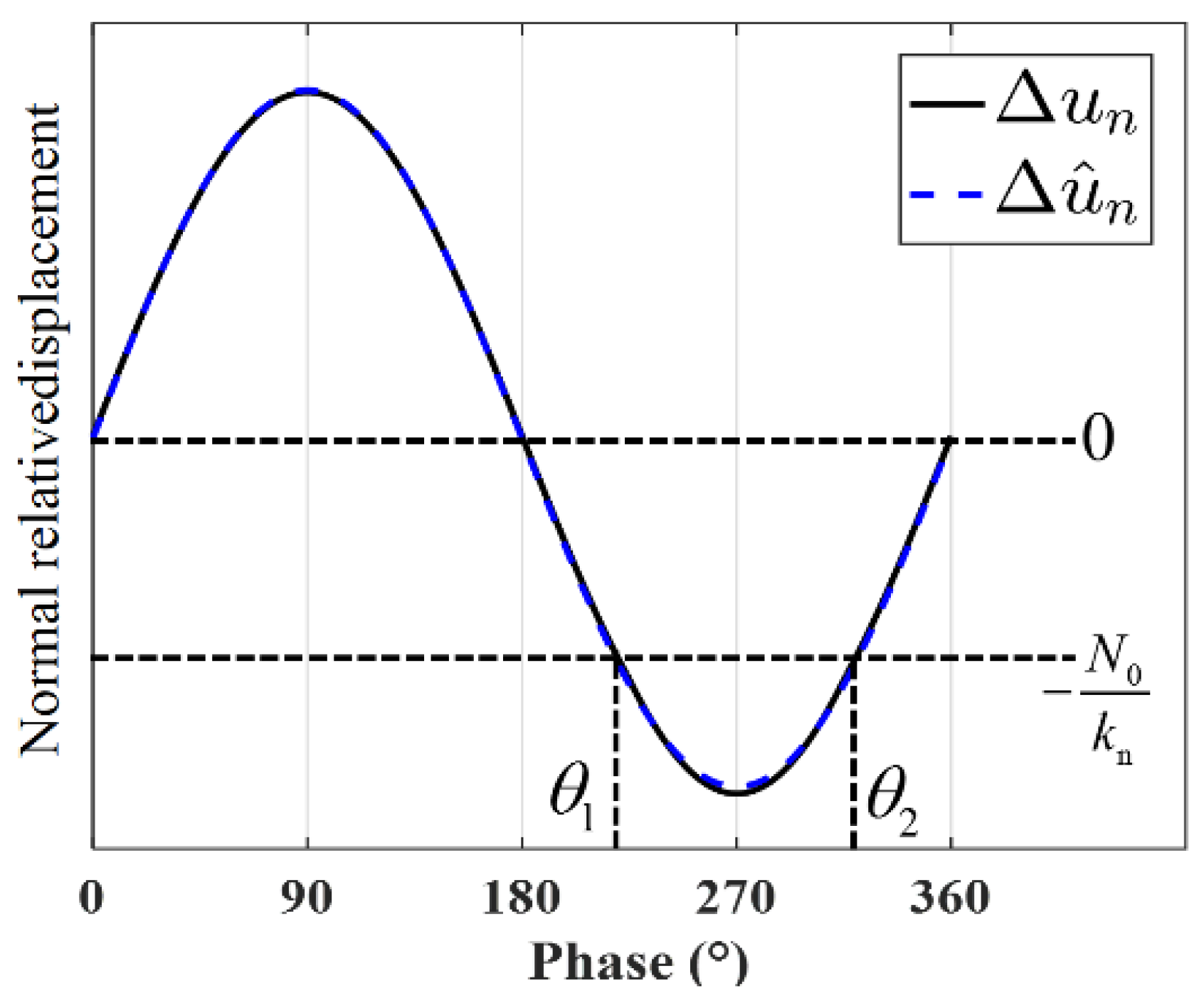
4.1.1. Normal Force and Relative Motion
4.1.2. Amplitude Factor γ
- (1)
- For each amplitude and frequency of excitation, the corresponding displacement-time curve can be calculated. It should be noted that since ζ is related to the unknown , an iterative solution between is needed;
- (2)
- By changing the excitation frequency, the max response amplitude and its corresponding frequency can be obtained, which are respectively resonance amplitude and resonance frequency; the amplitude of separation and contact in a period of resonance can be extracted, and the amplitude factor γ under the current resonance amplitude can be calculated;
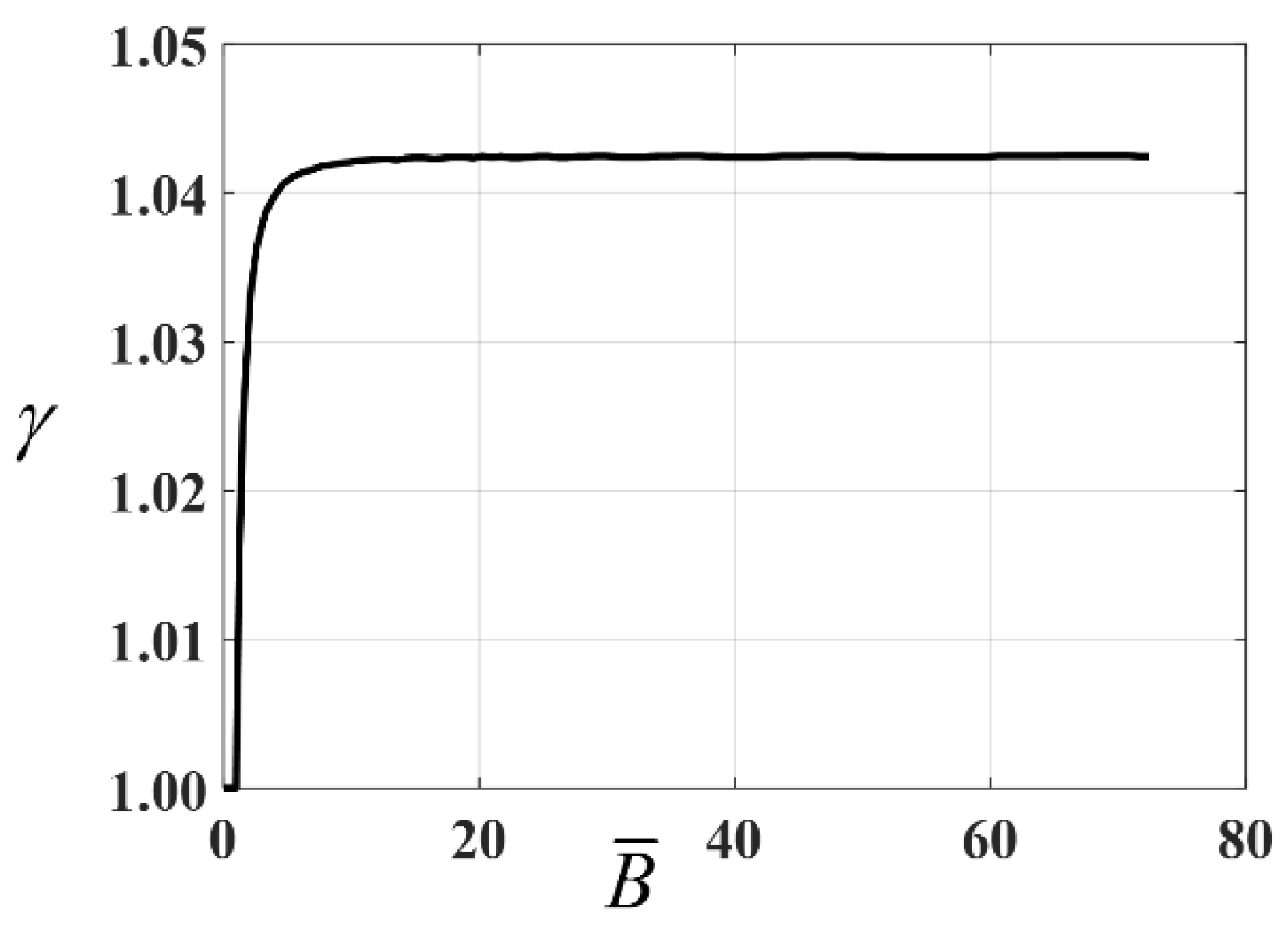
- (3)
- Change the excitation amplitude to obtain amplitude factor. Figure 15 shows the curve of amplitude factor γ with the dimensionless normal amplitude .
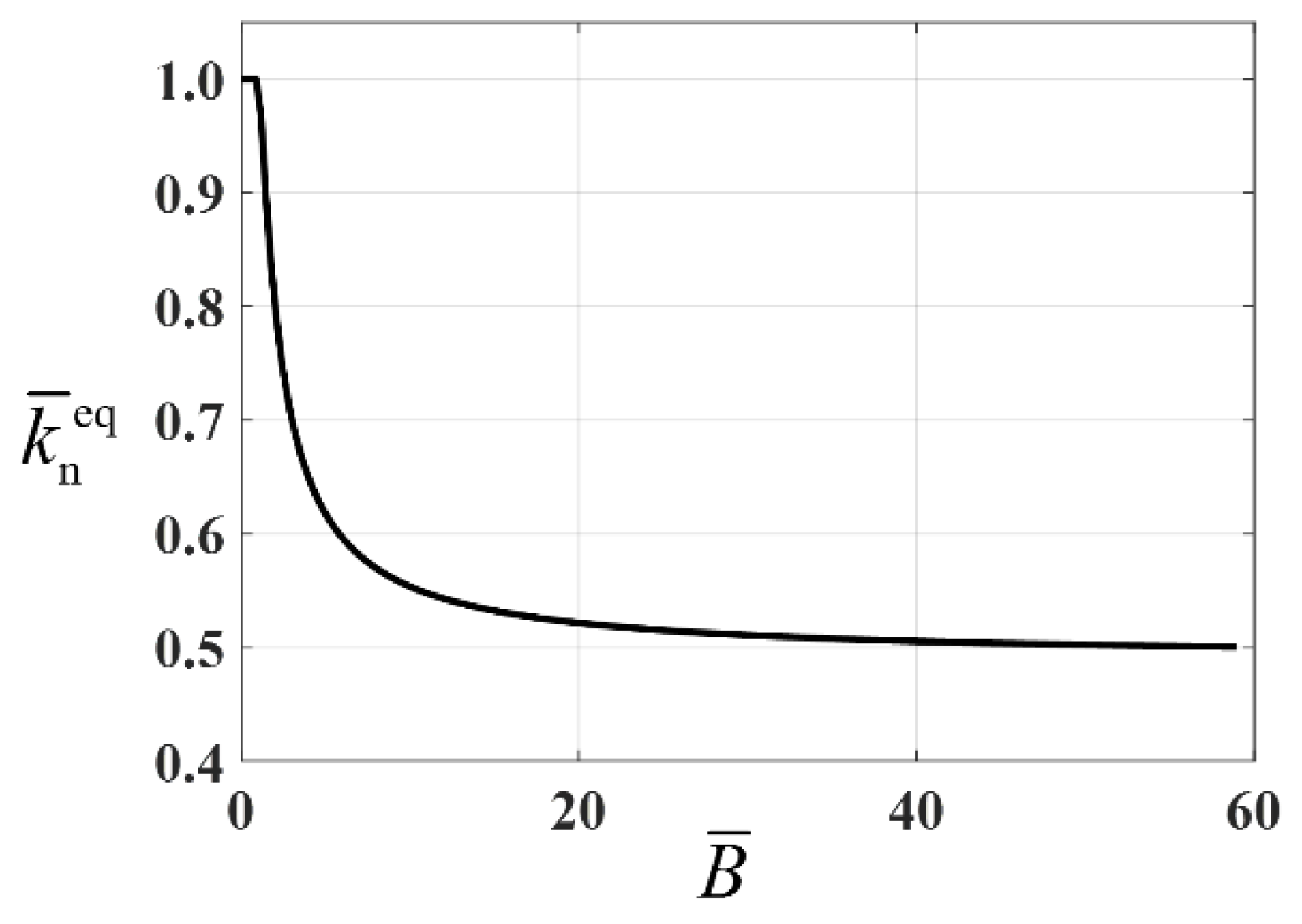
4.1.3. Equivalent Stiffness on Amplitude
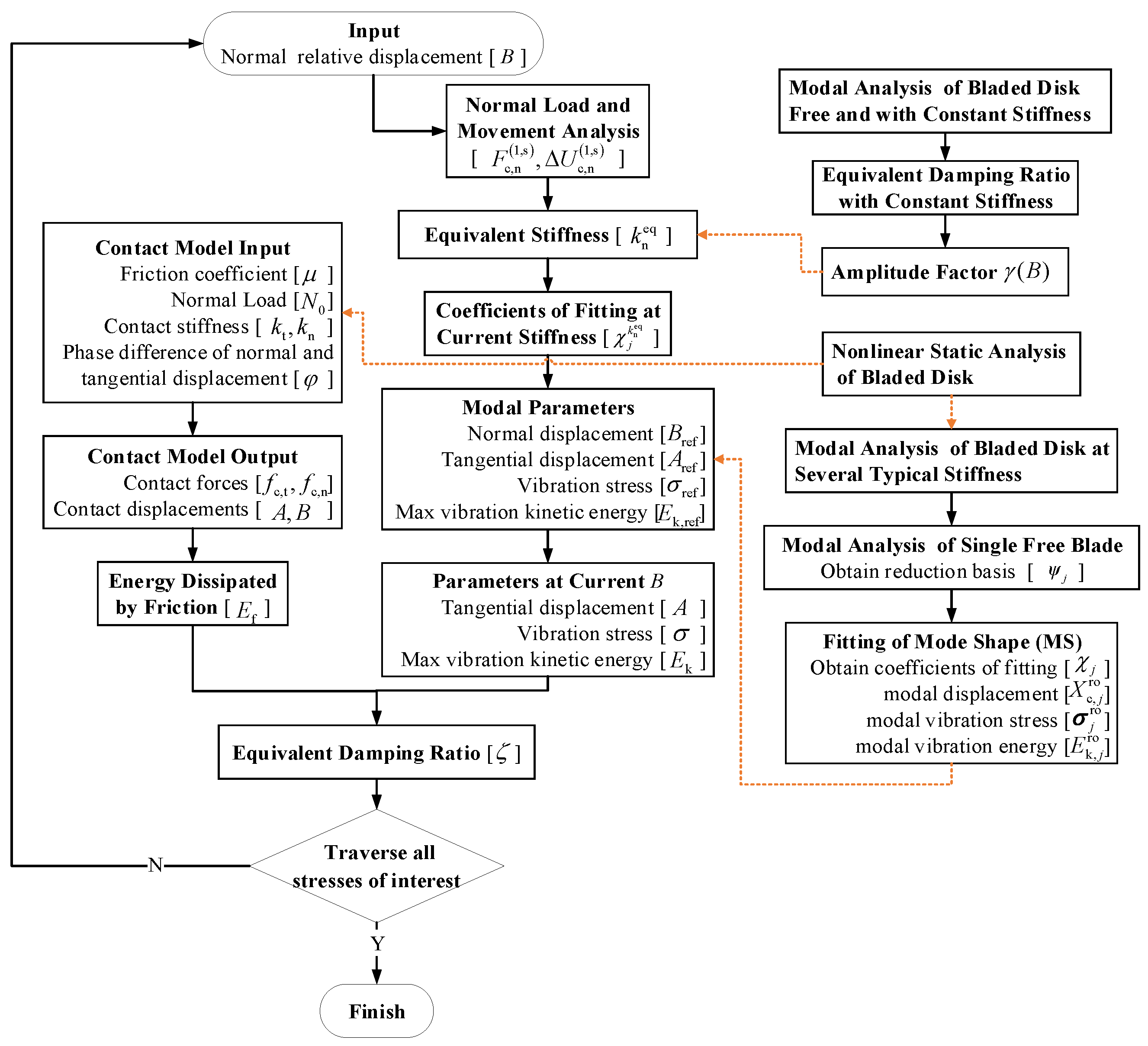
4.2. Parameters for Damping Evaluation
- (1)
- Extract the following modal data from each mode ψj in reduction basis Ψ: the displacements in three directions , the vibration stress at critical location , the max kinetic energy ;
- (2)
- Given the amplitude B, the new equivalent stiffness and the fitting coefficients of the reduced modes under the current stiffness are obtained;
- (3)
- Combined with Section 3.2, the displacements in three directions under this equivalent stiffness can be obtained by , for and in the same way; The relative amplitudes Aref and Bref in the local coordinate system are calculated; Vibration stress vector under this stiffness is , in which the max component is taken as σref; The max vibration kinetic energy is .
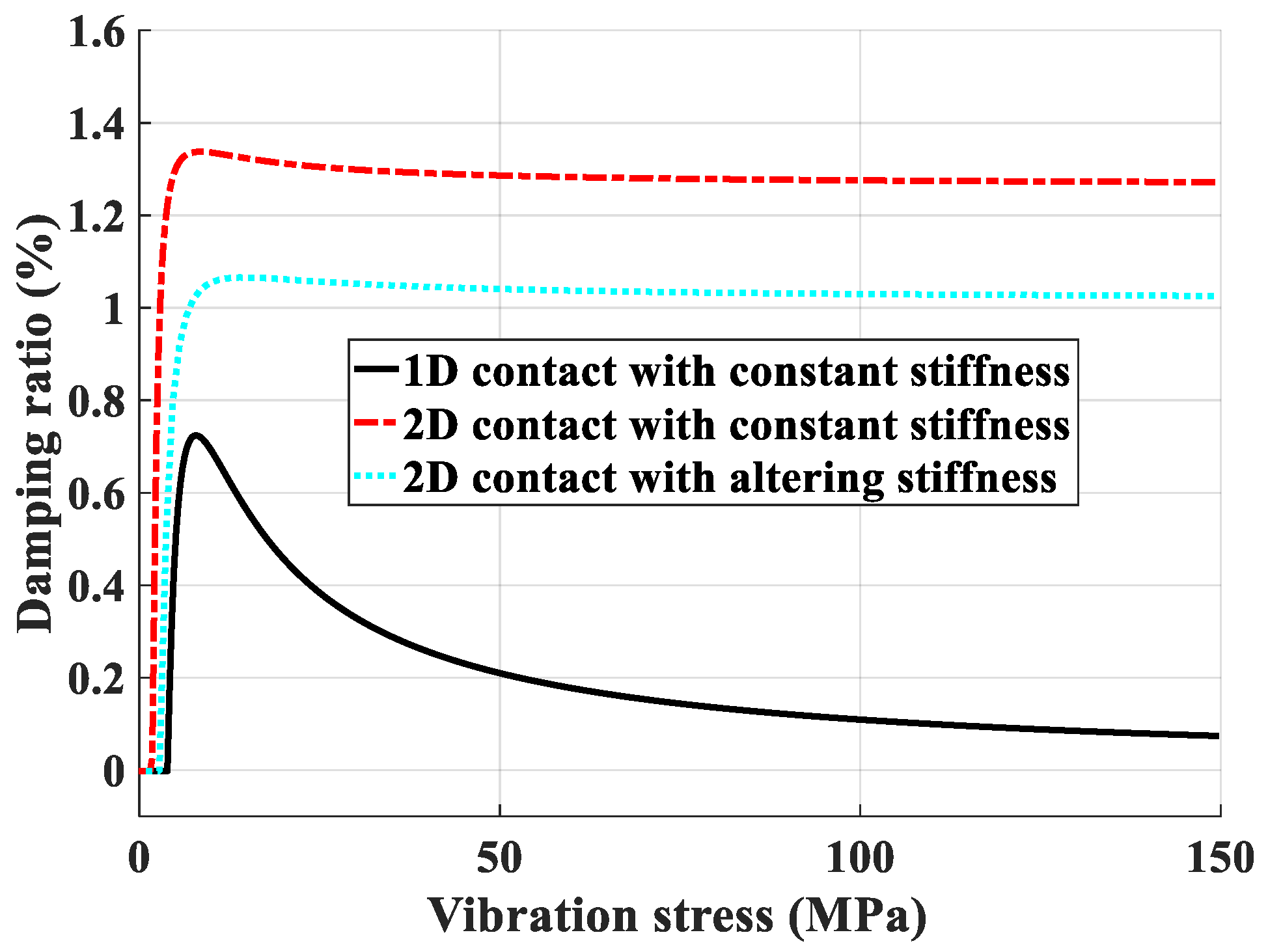
4.3. Damping Characteristic Curve with the Altering Stiffness
5. Discussion
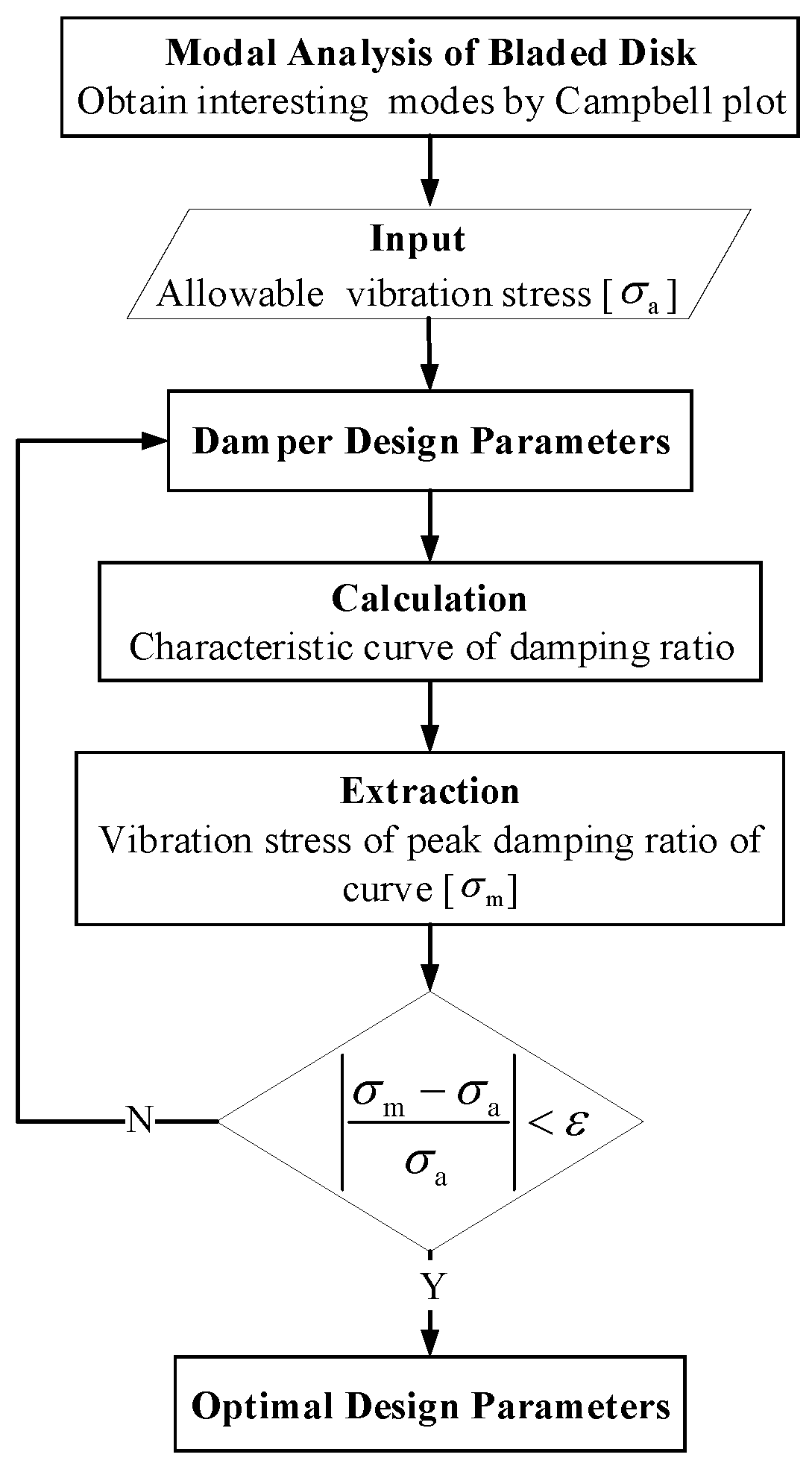
5.1. Vibration-Reduction Design
5.2. Sensitivity Analysis
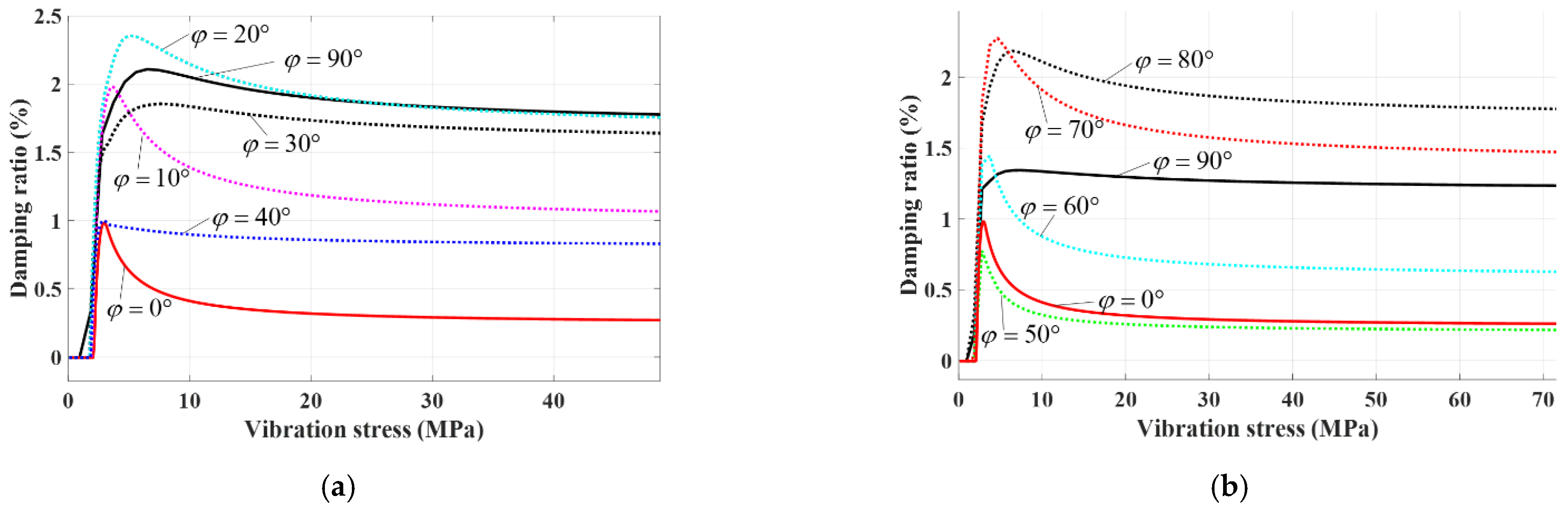
5.2.1. Phase Angle between Normal and Tangential Motion
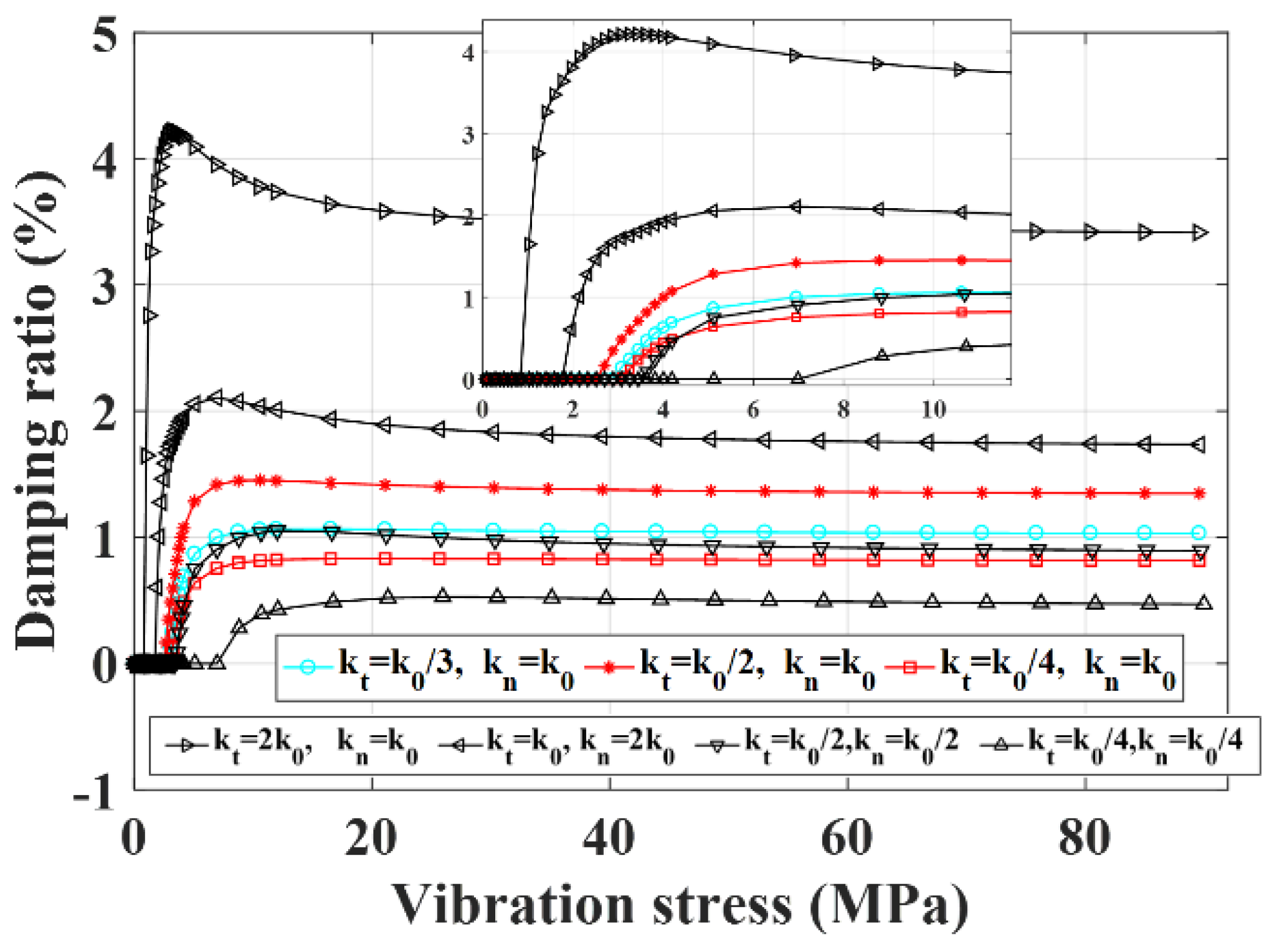
5.2.2. Contact Stiffness
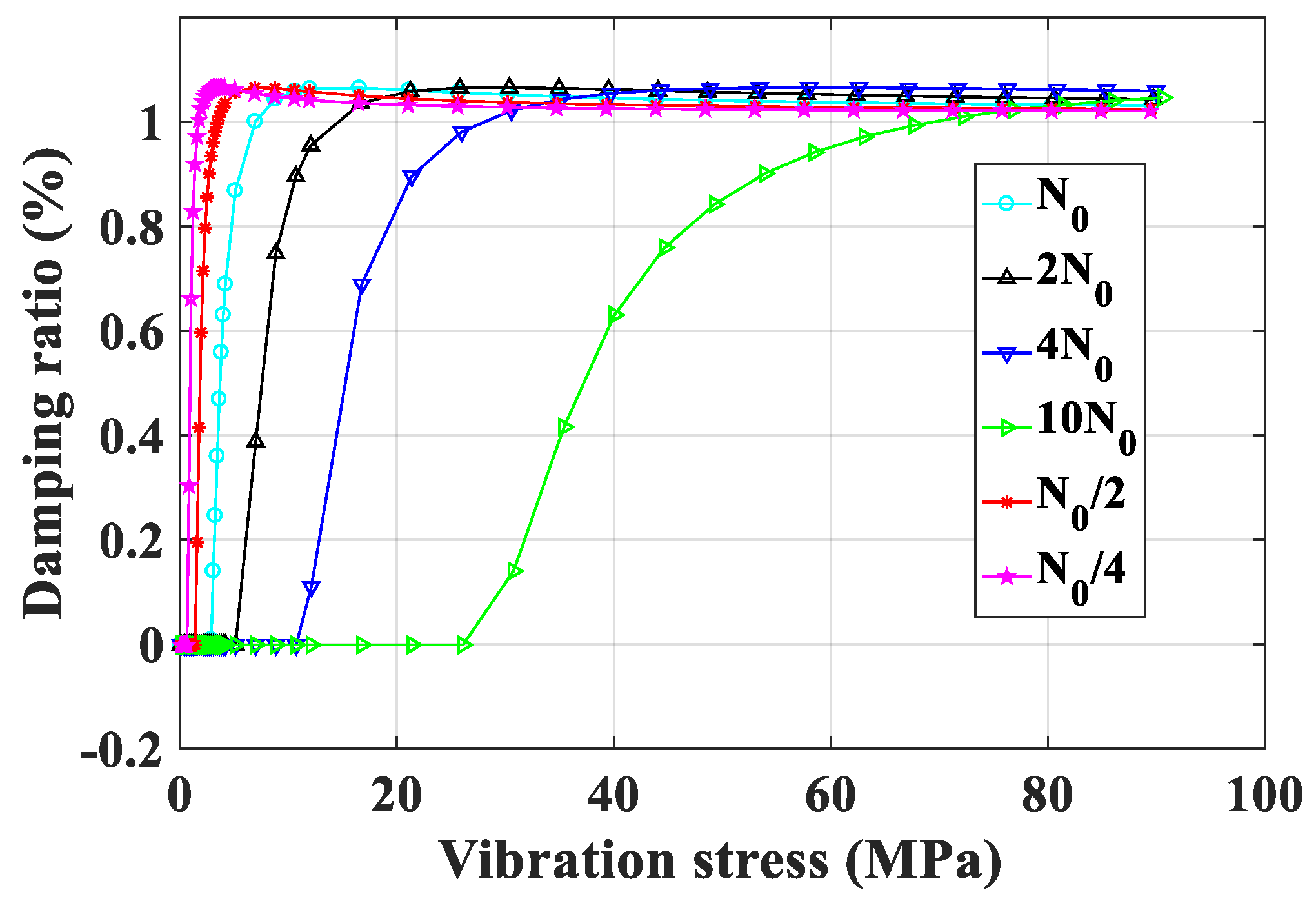
5.2.3. Initial Contact Normal Force
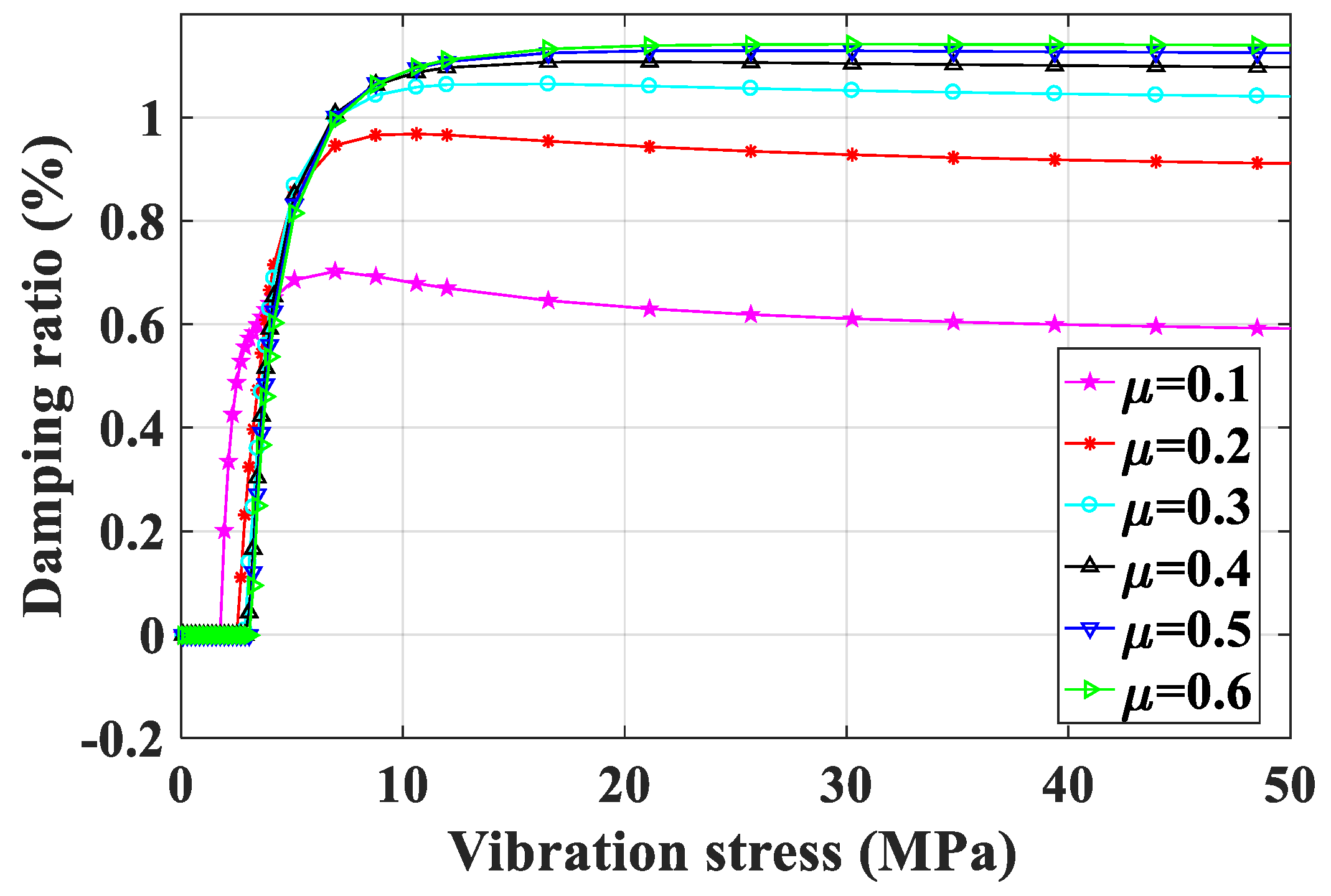
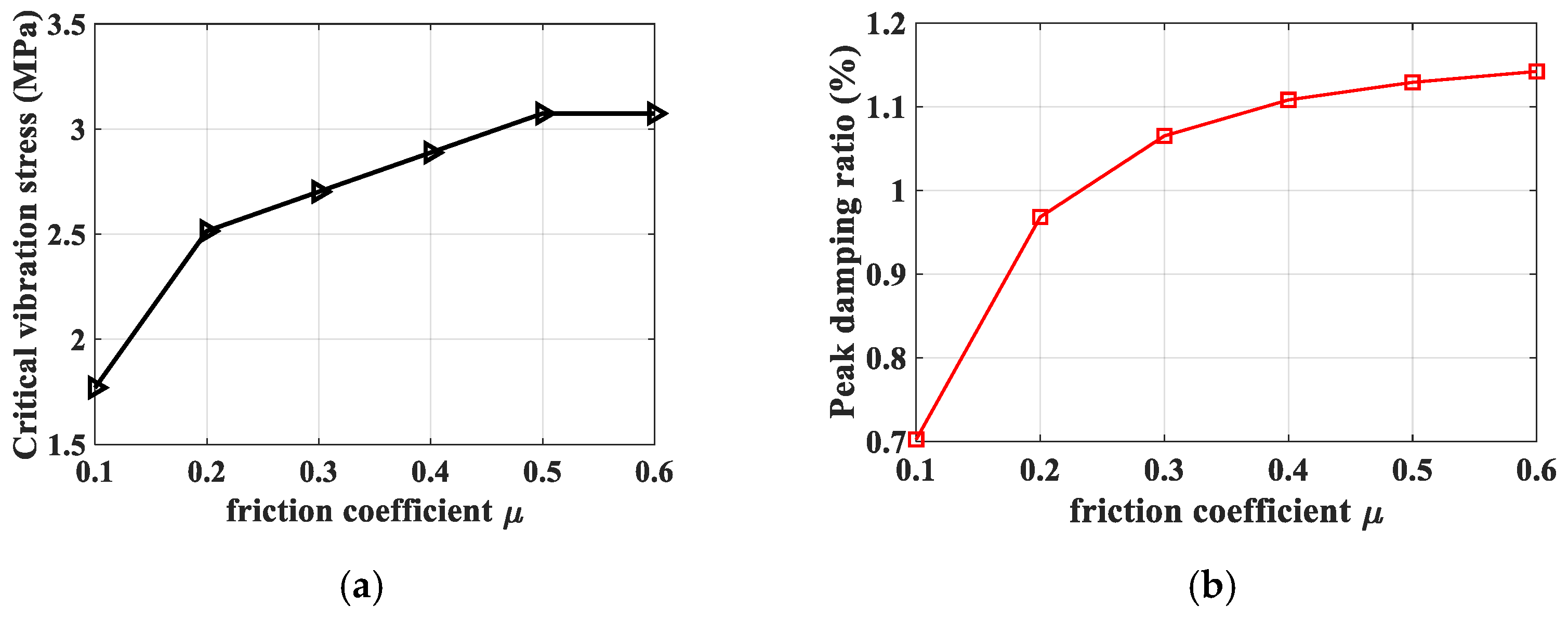
5.2.4. Friction Coefficient
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Srinivasan, A.V. Flutter and Resonant Vibration Characteristics of Engine Blades. J. Eng. Gas Turbines Power 1997, 119, 742–775. [Google Scholar] [CrossRef]
- Ewins, D.J. Control of Vibration and Resonance in Aero Engines and Rotating Machinery–An Overview. Int. J. Press. Vessel. Pip. 2010, 87, 504–510. [Google Scholar] [CrossRef]
- Krack, M.; Salles, L.; Thouverez, F. Vibration Prediction of Bladed Disks Coupled by Friction Joints. Arch. Comput. Methods Eng. 2017, 24, 589–636. [Google Scholar] [CrossRef] [Green Version]
- Bograd, S.; Reuss, P.; Schmidt, A.; Gaul, L.; Mayer, M. Modeling the Dynamics of Mechanical Joints. Mech. Syst. Signal Process. 2011, 25, 2801–2826. [Google Scholar] [CrossRef]
- Marques, F.; Flores, P.; Pimenta Claro, J.C.; Lankarani, H.M. A Survey and Comparison of Several Friction Force Models for Dynamic Analysis of Multibody Mechanical Systems. Nonlinear Dyn. 2016, 86, 1407–1443. [Google Scholar] [CrossRef]
- Griffin, J.H. Friction Damping of Resonant Stresses in Gas Turbine Engine Airfoils. J. Eng. Power 1980, 102, 329–333. [Google Scholar] [CrossRef]
- Yang, B.D.; Chu, M.L.; Menq, C.H. Stick–Slip–Separation Analysis and Non-linear Stiffness and Damping Characterization of Friction Contacts Having Variable Normal Load. J. Sound Vib. 1998, 210, 461–481. [Google Scholar] [CrossRef]
- Sanliturk, K.Y.; Ewins, D.J. Modelling Two-Dimensional Friction Contact and Its Application Using Harmonic Balance Method. J. Sound Vib. 1996, 193, 511–523. [Google Scholar] [CrossRef]
- Yang, B.D.; Menq, C.H. Characterization of 3D Contact Kinematics and Prediction of Resonant Response of Structures Having 3D Frictional Constraint. J. Sound Vib. 1998, 217, 909–925. [Google Scholar] [CrossRef]
- Menq, C.H.; Griffin, J.H.; Bielak, J. The Influence of a Variable Normal Load on the Forced Vibration of a Frictionally Damped Structure. J. Eng. Gas Turbines Power 1986, 108, 300–305. [Google Scholar] [CrossRef]
- Phadke, R.; Berger, E.J. Friction Damping Analysis in Turbine Blades Using a User-Programmed Function in Ansys. In Proceedings of the 12th International Symposium on Transport Phenomena and Dynamics of Rotating Machinery, Honolulu, HI, USA, 17–22 February 2008. [Google Scholar]
- Cardona, A.; Lerusse, A.; Géradin, M. Fast Fourier Nonlinear Vibration Analysis. Comput. Mech. 1998, 22, 128–142. [Google Scholar] [CrossRef]
- Cameron, T.M.; Griffin, J.H. An Alternating Frequency/Time Domain Method for Calculating the Steady-State Response of Nonlinear Dynamic Systems. J. Appl. Mech. 1989, 56, 149–154. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Fu, J.; Zhang, Q. An Effective Numerical Method for Calculating Nonlinear Dynamics of Structures with Dry Friction: Application to Predict the Vibration Response of Blades with Underplatform Dampers. Nonlinear Dyn. 2017, 88, 223–237. [Google Scholar] [CrossRef]
- Kaneko, Y. Vibration Response Analysis of Mistuned Bladed Disk with Platform Damper: Effect of Friction Force Deviation on Vibration Characteristics. In Proceedings of the ASME Turbo Expo 2017: Turbine Technical Conference and Exposition, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar]
- Pesek, L.; Pust, L.; Snabl, P. Dry-Friction Damping in Vibrating Systems, Theory and Application to the Bladed Disc Assembly. In Nonlinear Structural Dynamics and Damping; Jauregui, J.C., Ed.; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar]
- Mehrdad, P.S.; Zucca, S. A Reduced Order Model for Nonlinear Dynamics of Mistuned Bladed Disks with Shroud Friction Contacts. J. Eng. Gas Turbines Power 2018, 141, 11031. [Google Scholar] [CrossRef]
- Petrov, E.P. A High-accuracy Model Reduction for Analysis of Nonlinear Vibrations in Structures with Contact Interfaces. J. Eng. Gas Turbines Power 2011, 133, 102503. [Google Scholar] [CrossRef]
- Krack, M.; Panning, L.; Wallaschek, J. A Method for Nonlinear Modal Analysis and Synthesis: Application to Harmonically Forced and Self-excited Mechanical Systems. J. Sound Vib. 2013, 332, 6798–6814. [Google Scholar] [CrossRef]
- Krack, M. Nonlinear Modal Analysis of Nonconservative Systems: Extension of the Periodic Motion Concept. Comput. Struct. 2015, 154, 59–71. [Google Scholar] [CrossRef]
- Förster, A.; Panning, L.; Wallaschek, J. Equivalent Linearization of Bladed Disk Assemblies with Friction Nonlinearities Under Random Excitation. In Proceedings of the ASME Turbo Expo 2020: Turbomachinery Technical Conference and Exposition, Virtual Conference, Online, 21–25 September 2020. [Google Scholar]
- Nan, G.; Lou, J.; Song, C. A New Approach for Solving Rub-Impact Dynamic Characteristics of Shrouded Blades Based on Macroslip Friction Model. Shock Vib. 2020, 2020, 8147143. [Google Scholar] [CrossRef]
- Hüls, M.; Panning, L.; Wallaschek, J. Influence of Geometric Design Parameters onto Vibratory Response and High-Cycle Fatigue Safety for Turbine Blades with Friction Damper. J. Eng. Gas Turbines Power 2018, 141, 41022. [Google Scholar] [CrossRef]
- Thomas, D.L. Dynamics of Rotationally Periodic Structures. Int. J. Numer. Methods Eng. 1979, 14, 81–102. [Google Scholar] [CrossRef] [Green Version]
- Petrov, E.P. A Method for Use of Cyclic Symmetry Properties in Analysis of Nonlinear Multiharmonic Vibrations of Bladed Disks. J. Turbomach. 2004, 126, 175–183. [Google Scholar] [CrossRef]
- Szwedowicz, J.; Sextro, W.; Visser, R.; Masserey, P.A. On Forced Vibration of Shrouded Turbine Blades. In Proceedings of the ASME Turbo Expo 2003, collocated with the 2003 International Joint Power Generation Conference, Atlanta, GA, USA, 16–19 June 2003. [Google Scholar]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Rao, S.S. Mechanical Vibrations, 5th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2011. [Google Scholar]
- Deutsch, F. Best Approximation in Inner Product Spaces; Springer: New York, NY, USA, 2001. [Google Scholar]
- Afzal, M.; Lopez, A.I.; Kari, L. Numerical Analysis of Multiple Friction Contacts in Bladed Disks. Int. J. Mech. Sci. 2018, 137, 224–237. [Google Scholar] [CrossRef]
- Krack, M.; Panning, L.; Wallaschek, J.; Siewert, C.; Hartung, A. Reduced Order Modeling Based on Complex Nonlinear Modal Analysis and Its Application to Bladed Disks With Shroud Contact. J. Eng. Gas Turbines Power 2013, 135, 102502. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Normal Force N0 (N) | Normal Contact Stiffness kn (×106 N/m) | Tangential Contact Stiffness kt (×106 N/m) |
|---|---|---|
| 7.145 | 2.06 | 0.69 |
| Parameters | 3ND 1B | 5ND 1E |
|---|---|---|
| Normal amplitude of the left shroud surface Xtl/mm | 45.65 | 4.88 |
| Tangential amplitude of the left shroud surface Xnl/mm | −1.00 | 45.41 |
| Normal amplitude of the right shroud surface Xtr/mm | 45.56 | 4.90 |
| Tangential amplitude of the right shroud surface Xnr/mm | 3.20 | 45.57 |
| Max vibration stress of blade σref/MPa | 5268 | 13,056 |
| Max vibration kinetic energy of the selected sector Ek,ref/J | 132 | 616 |
| IBPA φk/° | 12 | 19 |
| Parameters | 3ND 1B | 5ND 1E |
|---|---|---|
| Normal amplitude Aref/mm | 9.13 | 1.63 |
| Tangential amplitude Bref/mm | 4.19 | 15.13 |
| phase angle θ/° | −92 | 0 |
| Single Blade Reduction Basis ψj | χj of Different Stiffness | ||
|---|---|---|---|
| φ(0) | φ(0.5) | φ(1) | |
| 1B | −0.56 | −0.54 | −0.53 |
| 1E | 0.07 | 0.07 | 0.07 |
| 1T | 0.03 | 0.04 | 0.04 |
| 2B | −0.02 | −0.03 | −0.04 |
| 3B | 0.00 | 0.00 | 0.01 |
| 4B | 0.00 | −0.01 | −0.01 |
| RB Rotating z | −1.15 | −1.25 | −1.31 |
| RB Translating x | 0.69 | 0.75 | 0.78 |
| RB Translating y | 0.01 | 0.01 | 0.02 |
| error ε | 0.00537% | 0.00585% | 0.00656% |
| Single Blade Reduction Basis ψj | χj of Different Stiffness | ||
|---|---|---|---|
| φ(0) | φ(0.5) | φ(1) | |
| 1B | 0.55 | 0.54 | 0.53 |
| 1E | 0.07 | 0.08 | 0.08 |
| 1T | 0.03 | 0.04 | 0.05 |
| 2B | 0.02 | 0.03 | 0.04 |
| 3B | 0.00 | 0.00 | −0.01 |
| 4B | 0.00 | 0.01 | 0.01 |
| RB Rotating z | −1.18 | −1.26 | −1.32 |
| RB Translating x | 0.70 | 0.75 | 0.79 |
| RB Translating y | 0.05 | 0.05 | 0.05 |
| error ε | 0.00507% | 0.00557% | 0.00616% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, S.; Wang, Y.; Sun, Z.; Chen, S. A Prediction Method with Altering Equivalent Stiffness for Damping Evaluation of Shrouded Bladed Disk Dynamic Systems. Symmetry 2021, 13, 413. https://doi.org/10.3390/sym13030413
Gao S, Wang Y, Sun Z, Chen S. A Prediction Method with Altering Equivalent Stiffness for Damping Evaluation of Shrouded Bladed Disk Dynamic Systems. Symmetry. 2021; 13(3):413. https://doi.org/10.3390/sym13030413
Chicago/Turabian StyleGao, Shimin, Yanrong Wang, Zhiwei Sun, and Siyuan Chen. 2021. "A Prediction Method with Altering Equivalent Stiffness for Damping Evaluation of Shrouded Bladed Disk Dynamic Systems" Symmetry 13, no. 3: 413. https://doi.org/10.3390/sym13030413
APA StyleGao, S., Wang, Y., Sun, Z., & Chen, S. (2021). A Prediction Method with Altering Equivalent Stiffness for Damping Evaluation of Shrouded Bladed Disk Dynamic Systems. Symmetry, 13(3), 413. https://doi.org/10.3390/sym13030413