
Extending the Model-Based Controller Design to Higher-Order Plant Models and Measurement Noise



Abstract
:1. Introduction
- well motivated,
- preferably model-based,
- analytically derived,
- simple and easy to remember,
- work well for a variety of processes,
- provide fast tracking speed and good disturbance rejection,
- provide stability and robustness with lower variance of process inputs, and
- reduce sensitivity to measurement noise.
2. Exploring the SIMC Method for Different Plant and Dead-Time Approximations
2.1. Controllers Based on FOTD Models
2.2. Controllers Based on SOTD Models
2.3. Controller Based on TOTD Models
2.4. Controller Based on QOTD Models
2.5. Why Just the Multiple Plant Time Constants?
2.6. Low-Pass Noise Attenuation Filters
2.7. Original Half Rule Method
- the largest neglected (denominator) time constant (lag) has been distributed evenly to the effective delay and the smallest retained time constant,
- the effective delay has summarized (besides of above contribution) the original plant delay and different shorter loop delays.
2.8. Modified Half Rule for Multiple Time Constants
3. Refined Performance Measures
3.1. Ideal Shapes of Step Responses at the Plant Input and Output
- continuous for ,
- with possible discontinuity at and
- with initial value and final steady-state value .
3.2. Shape Related Performance Measures for Useful/Excessive Output Increments
3.3. Shape Related Performance Measures for Useful/Excessive Input Increments
3.4. First Evaluation Step—Idealized Situation with No Noise
3.5. Optimization Problem
- Traditional optimization based on quadratic cost functions (LQ control design) does not distinguish useful and excessive signal increments which significantly limits effectiveness of its application.
- Similarly, the use of TV to evaluate control efforts does not distinguish between useful and redundant increments of control signal. This can cause a problem especially when controlling higher order systems and requiring several active impulses of control.
- Separation of the excessive and useful increments (both at the input and output) enables to focus fully on an effective minimization of the superfluous changes.
- In application to evaluation of the setpoint step responses of the plant output , the modified performance measure (42) has a clear mathematical and physical interpretation as a deviation from monotonicity.
- Optimal controller and filter tuning is expected to depend on the noise parameters. Thus, without considering filtration properties, a “generally” optimal PID tuning becomes questionable.
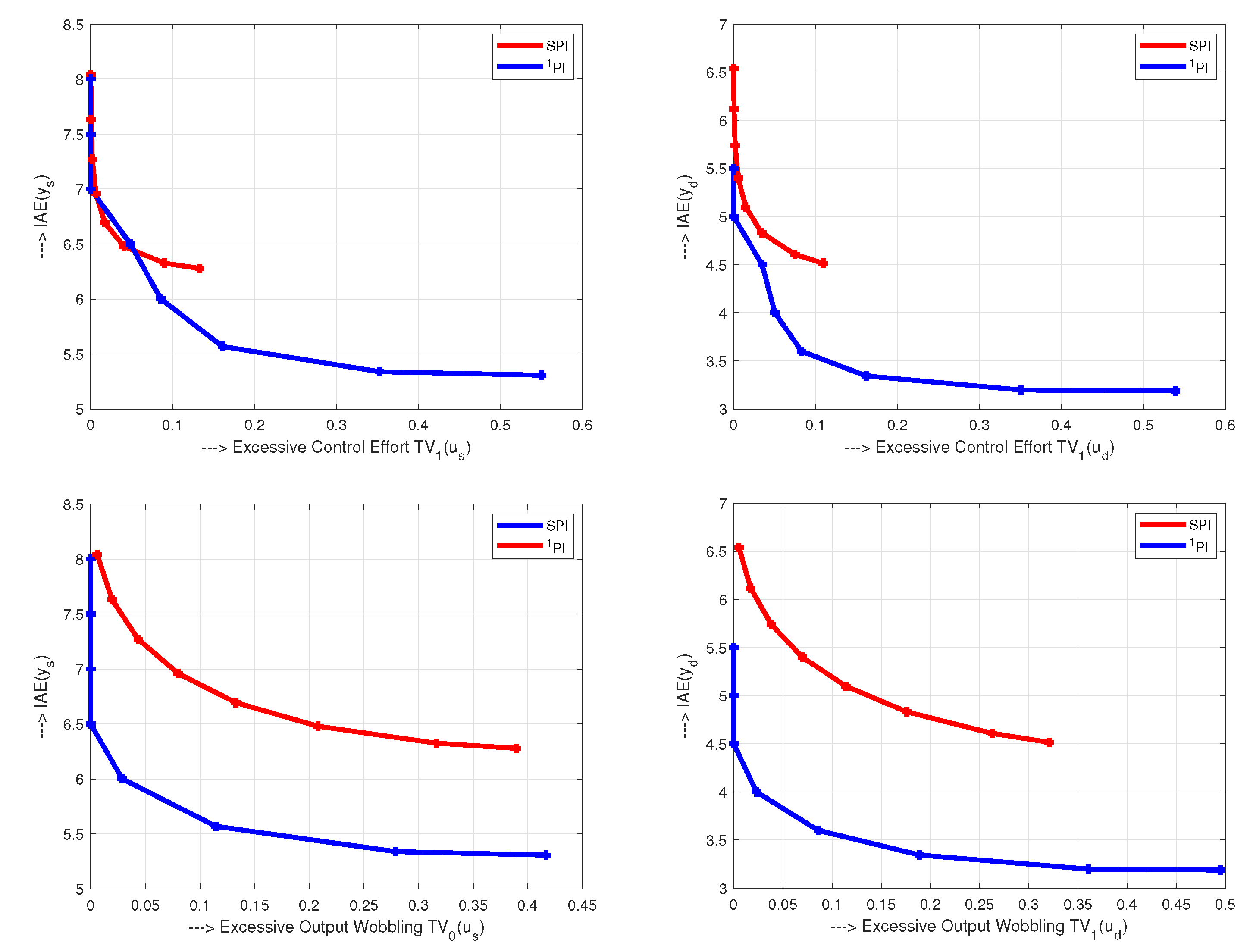
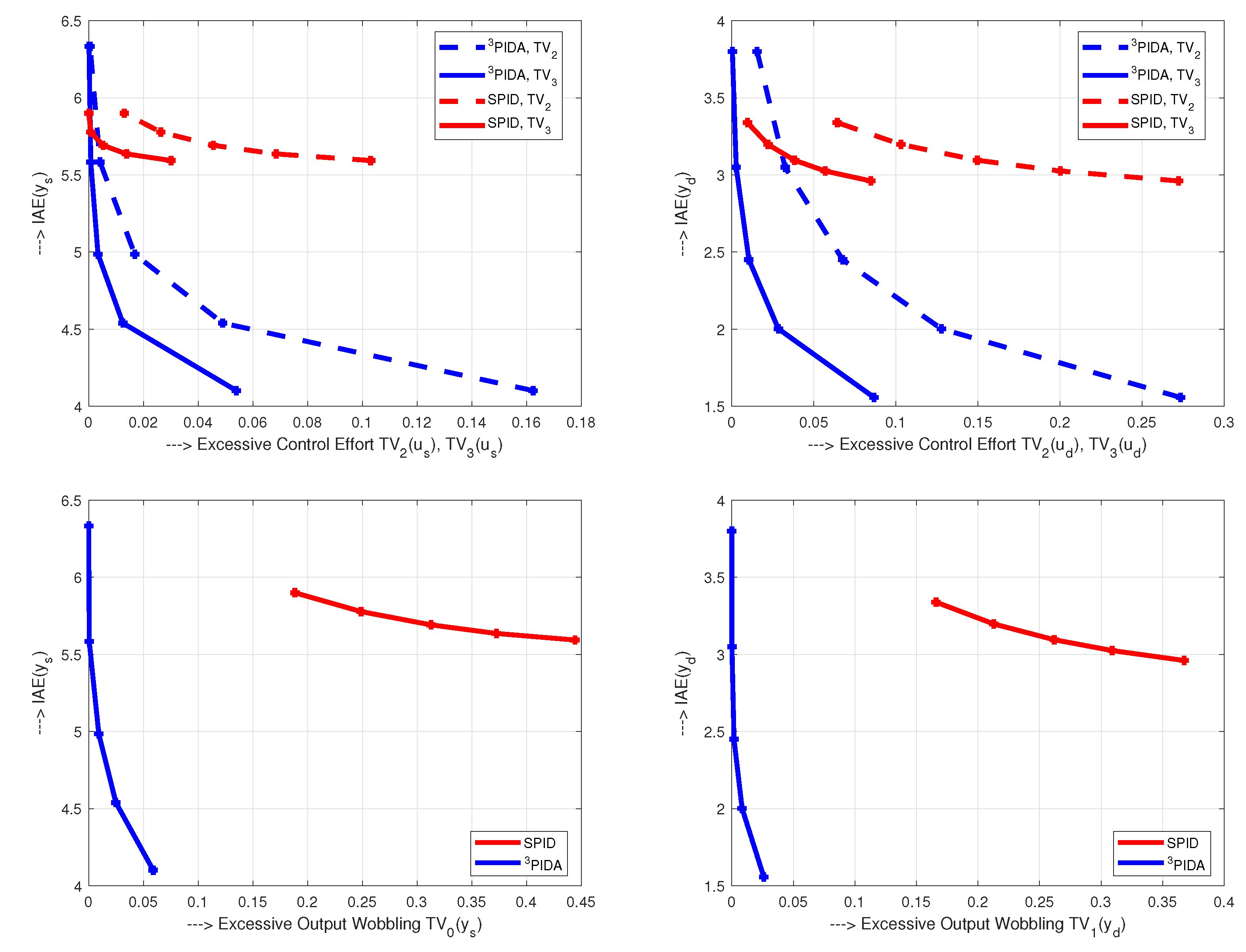
3.6. Speed-Effort and Speed-Wobbling Characteristics
- the shape related deviations at the input or output, that is, the measures expressing, how far are the measured transients from their ideally required shapes (variable ) and
- IAE measure characterizing the speed of the control error attenuation (variable )
3.7. IAE-Optimization-Based Tuning of Noisy FOTD Plants
4. Modified Controllers with Reduced Initial Control Signal Peak
4.1. Integrative Controllers for the Simplest Pure Dead-Time Plant Models
4.2. Pre-Filter Design for the SIMC PID Controller
5. Illustrative Examples
5.1. Example 1: SIMC and Newly Proposed Control of FOTD System with the 2nd Order Low-Pass Filter
5.2. Example 2:SE/SW Based Analysis of Controller + Filter Tuning—No Noise
5.3. Example 3: SE and SW Characteristics—External Noise
5.4. Example 4: SIMC and Newly Proposed Control of Fourth-Order System, No Noise
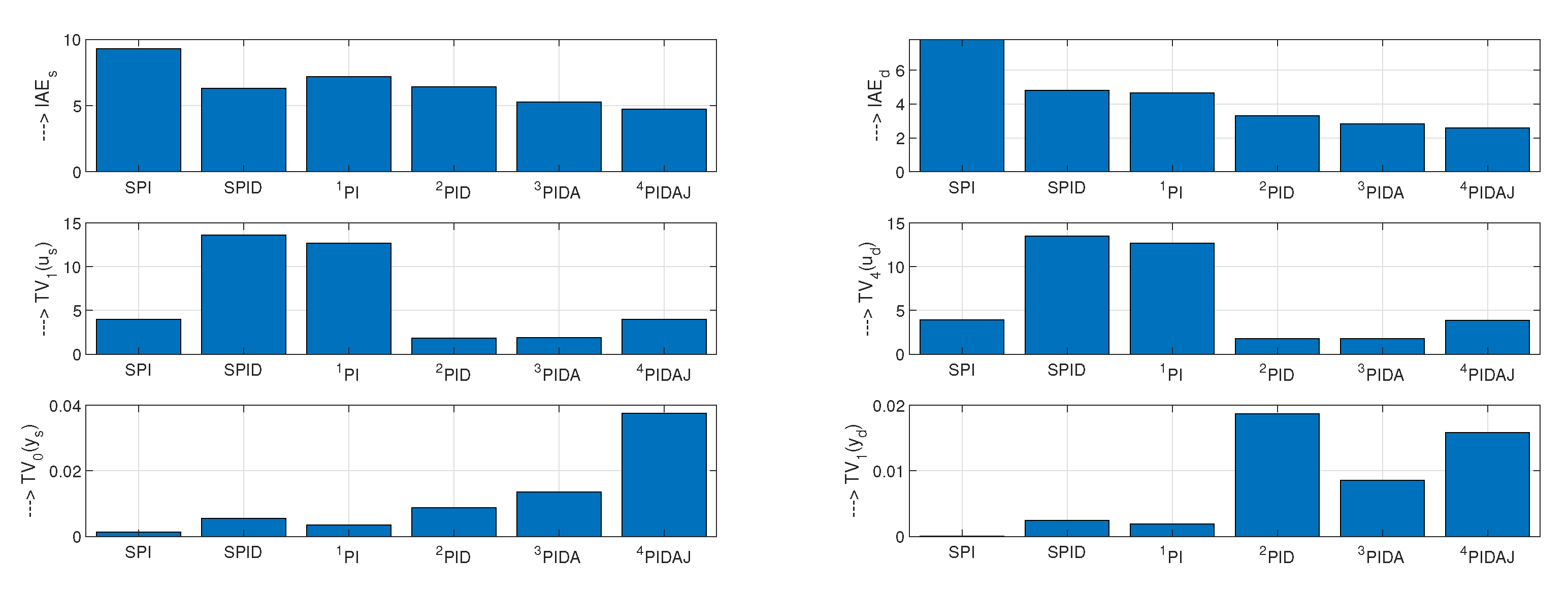
5.5. Example 5: Comparing SIMC PI and PID Controllers with the Newly Proposed Solutions Applied to Fourth-Order System
5.6. Example 6: SIMC and Newly Proposed Control of QOTD System with 3rd-Order Noise Attenuation Filters
6. Discussion: Everything Should Be Made as Simple as Possible, but Not Simpler
- obtaining a perfect process model is frequently associated with trial-and-error approaches enabling to achieve the highest possible match between theoretical and experimentally obtained results (underpinned by appropriate identification results).
- These expectations are usually interpreted in terms of multicriteria cost functions, instead of a single general-purpose cost function and a single all-encompassing optimization.
- Diverse requirements led to the birth of fuzzy control based on the use of linguistically formulated conditions of optimality [45]. However, similar objectives can be easily achieved with simple analytical and modular approaches offering more direct relation to the tuning parameters, especially when they are designed to optimally cover the specific requirements.
- When looking for the optimal solution for a wider class of problems, the price to be paid is a wide range of existing and newly emerging controllers and methods for evaluating them. A simple list of existing solutions (as offered by [5]), with their ever-growing number, may not lead to a simplification and clarity of the situation. From this point of view, it seems more efficient to classify existing solutions into dynamic classes of control [17,39].
- From this perspective, the clear structure, openness, flexibility of adaptation and compatibility with the concept of dynamic classes can be considered as the main advantages of the newly proposed modifications to the original SIMC method.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 1P | One-Pulse, response with 2 monotonic segments (1 extreme point) |
| 2P | Two-Pulse, response with 3 monotonic segments (2 extreme points) |
| ART | Average Residence Time |
| BIBO | Bounded-Input-Bounded-Output |
| FOTD | First-Order Time Delayed |
| HO | Higher Order |
| HR | Half-Rule |
| I | Integrative |
| IMC | Internal Model Control |
| jOTD | j-Order Time Delayed |
| MHR | Modified Half-Rule |
| mP | m-Pulse, response with monotonic segments (m extreme points) |
| PI | Proportional-Integrative |
| PID | Proportional-Integrative-Derivative |
| PIDA | Proportional-Integrative-Derivative-Accelerative |
| PIDAJ | Proportional-Integrative-Derivative-Acceleration-Jerk |
| R | mth-order controller for jth-order stable plant, |
| R | mth-order controller for jth-order stable plant combined with nth-order filter , |
| SE | Speed - Effort |
| SIMC | Simple Control/Skogestad IMC |
| SPI | SIMC PI controller |
| SPID | SIMC PID controller |
| SW | Speed - Wobbling |
| SOTD | Second-Order Time Delayed |
| QOTD | Fourth-Order Time Delayed (with quadruple time constant) |
| TOTD | Third-Order Time Delayed |
References
- Åström, K.J.; Hägglund, T. Advanced PID Control; ISA, Research Triangle Park: Durham, NC, USA, 2006. [Google Scholar]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.; HosseinNia, S.H.; Petlenkov, E. FOPID Controllers and Their Industrial Applications: A Survey of Recent Results. IFAC-PapersOnLine 2018, 51, 25–30. [Google Scholar] [CrossRef]
- Efe, M.O. Fractional Order Systems in Industrial Automation: A Survey. IEEE Trans. Ind. Inform. 2011, 7, 582–591. [Google Scholar] [CrossRef]
- Skogestad, S. Simple analytic rules for model reduction and PID controller tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef] [Green Version]
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules, 3rd ed.; Imperial College Press: London, UK, 2009. [Google Scholar]
- Grimholt, C.; Skogestad, S. Optimal PI and PID control of first-order plus delay processes and evaluation of the original and improved SIMC rules. J. Process Control 2018, 70, 36–46. [Google Scholar] [CrossRef]
- Huba, M.; Vrančič, D.; Bisták, P. Control for IPDT Plants. Part 1: Disturbance Response. In Proceedings of the 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018. [Google Scholar]
- Huba, M.; Vrančič, D. Comparing filtered PI, PID and PIDD2 control for the FOTD plants. In Proceedings of the 3rd IFAC Conference on Advances in Proportional-Integral-Derivative Control, Ghent, Belgium, 9–11 May 2018. [Google Scholar]
- Huba, M.; Vrančič, D. Introduction to the Discrete Time Control for the IPDT Plant. In Proceedings of the 15th IFAC International Conference on Programmable Devices and Embedded Systems, Ostrava, Czech Republic, 23–25 May 2018. [Google Scholar]
- Huba, M. Model-based higher-order PID control design. In Proceedings of the 21st IFAC World Congress, Berlin, Germany, 12–17 July 2020. [Google Scholar]
- Huba, M.; Vrančić, D.; Bisták, P. PID Control with Higher Order Derivative Degrees for IPDT Plant Models. IEEE Access 2021, 9, 2478–2495. [Google Scholar] [CrossRef]
- Skogestad, S. Tuning for Smooth PID Control with Acceptable Disturbance Rejection. Ind. Eng. Chem. Res. 2006, 45, 7817–7822. [Google Scholar] [CrossRef]
- Huba, M. Exploring PID tuning strategies considering noise impact in the IPDT plant control. In Proceedings of the 16th IFAC Int. Conference on Programmable Devices and Embedded Systems, High Tatras, Slovakia, 29–31 October 2019. [Google Scholar]
- Wei, Y.; Hu, Y.; Dai, Y.; Wang, Y. A Generalized Padé Approximation of Time Delay Operator. Int. J. Control. Autom. Syst. 2015, 14, 181–187. [Google Scholar] [CrossRef]
- Chien, K.L.; Hrones, J.; Reswick, J. On the automatic control of generalized passive systems. Trans. ASME 1952, 74, 175–185. [Google Scholar]
- Visioli, A. Practical PID Control; Springer: London, UK, 2006. [Google Scholar]
- Huba, M.; Šimunek, M. Modular Approach to Teaching PID Control. IEEE Trans. Ind. Electr. 2007, 54, 3112–3121. [Google Scholar] [CrossRef]
- Strejc, V. Näherungsverfahren für aperiodische Übergangscharakteristiken. Regelungstechnik 1959, 7, 124–128. [Google Scholar]
- Huba, M. Constrained filtered PID Controller for IPDT plants. In Proceedings of the 27th Mediterranean Conference on Control and Automation (MED), Akko, Israel, 1–4 July 2019. [Google Scholar]
- Segovia, V.R.; Hägglund, T.; Åström, K. Measurement noise filtering for PID controllers. J. Process Control 2014, 24, 299–313. [Google Scholar] [CrossRef]
- Rivera, D.E.; Morari, M.; Skogestad, S. Internal model control. 4. PID controller design. Ind Eng. Chem. Res. 1986, 25, 252–265. [Google Scholar] [CrossRef]
- Grimholt, C.; Skogestad, S. Optimal PID control of double integrating processes. IFAC-PapersOnLine 2016, 49, 127–132. [Google Scholar] [CrossRef]
- Åström, K.J.; Hägglund, T. PID Controllers: Theory, Design, and Tuning, 2nd ed.; Instrument Society of America: Research Triangle Park, NC, USA, 1995. [Google Scholar]
- Feldbaum, A. Optimal Control Systems; Academic Press: Cambridge, MA, USA, 1965. [Google Scholar]
- Pontrjagin, L.; Boltjanskij, V.; Gamkrelidze, R.; Miščenko, J. The Mathematical Theory of Optimal Processes; Interscience: New York, NY, USA, 1962. [Google Scholar]
- Föllinger, O. Regelungstechnik. 8. Auflage; Hüthig Buch Verlag: Heidelberg, Germany, 1994. [Google Scholar]
- Glattfelder, A.; Schaufelberger, W. Control Systems with Input and Output Constraints; Springer: Berlin, Germany, 2003. [Google Scholar]
- Huba, M. Designing Robust Controller Tuning for Dead Time Systems. In Int. Conf. System Structure and Control; IFAC: Ancona, Italy, 2010. [Google Scholar]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods – An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Huba, M. Performance measures, performance limits and optimal PI control for the IPDT plant. J. Process. Control. 2013, 23, 500–515. [Google Scholar] [CrossRef]
- Huba, M. Open flexible PD-controller design for different filtering properties. In Proceedings of the 39th Annual Conference of the IEEE Industrial Electronics Society (IECON), Vienna, Austria, 10–13 November 2013. [Google Scholar]
- Huba, M. Filter choice for an effective measurement noise attenuation in PI and PID controllers. In Proceedings of the ICM2015, Nagoya, Japan, 6–8 March 2015. [Google Scholar]
- Reswick, J.B. Disturbance-Response Feedback—A new control concept. Trans. ASME 1956, 1, 153–162. [Google Scholar]
- Huba, M.; Kulha, P.; Skachová, Z. Two Dynamical Classes of PI-Controllers for the 1st Order Loops. In Proceedings of the Preprints 2nd IFAC Workshop ”NTDCS” New Trends in Design of Control Systems, Smolenice, Slovak Republic, 7–10 September 1997; pp. 293–298.
- Hanus, R.; Peng, Y. Conditioning technique for controllers with time delays. IEEE Trans. Aututomatic Control 1992, 37, 689–692. [Google Scholar] [CrossRef]
- Kothare, M.; Campo, P.J.; Morari, M.; Nett, C.N. A Unified Framework for the Study of Anti-windup Designs. Automatica 1994, 30, 1869–1883. [Google Scholar] [CrossRef] [Green Version]
- Peng, Y.; Vrančič, D.; Hanus, R. Anti-Windup, Bumpless and Conditioned Trnasfer Techniques for PID Controllers. IEEE Control Syst. 1996, 16, 48–57. [Google Scholar]
- Peng, Y.; Vrančič, D.; Hanus, R. A Review of Anti-Windup, Bumpless and Conditioned Transfer. In Proceedings of the 13th IFAC World Congress, San Francisco, CA, USA, 30 June–5 July 1996; pp. 79–84. [Google Scholar]
- Huba, M.; Bistak, P. Dynamic classes in the PID control. In Proceedings of the 1999 American Control Conference (Cat. No. 99CH36251), San Diego, CA, USA, 2–4 June 1999; Volume 6, pp. 3868–3872. [Google Scholar]
- Huba, M. Constrained pole assignment control. In Current Trends in Nonlinear Systems and Control; Menini, L., Zaccarian, L., Abdallah, C.T., Eds.; Birkhäuser: Boston, MA, USA, 2006; pp. 163–183. [Google Scholar]
- Huba, M. Computer Design of Robust I-controller. In Proceedings of the IFAC World Congress, Milan, Italy, 28 August–2 September 2011; pp. 7468–7473. [Google Scholar]
- Huba, M. Robust Tuning of the Simplest Dead Time Compensators. In Proceedings of the 2014 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 16–18 October 2014. [Google Scholar]
- Skogestad, S. Probably the best simple PID tuning rules in the world. In Proceedings of the AIChE Annual Meeting, Reno, NV, USA, 4–9 November 2001. [Google Scholar]
- Grimholt, C.; Skogestad, S. Optimal PI-Control and Verifcation of the SIMC Tuning Rule. IFAC Proc. Vol. 2012, 45, 11–22. [Google Scholar] [CrossRef] [Green Version]
- Carvajal, J.; Chen, G.; Ogmen, H. Fuzzy PID controller: Design, performance evaluation, and stability analysis. Inf. Sci. 2000, 123, 249–270. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | SPI | SPID | PI | PID | PIDA | PIDAJ |
|---|---|---|---|---|---|---|
| 9.3005 | 6.3096 | 7.2040 | 6.4126 | 5.2836 | 4.7447 | |
| 3.9871 | 13.5908 | 12.7076 | 1.8372 | 1.8740 | 3.9900 | |
| 1.3649 | 5.5289 | 3.4414 | 8.7998 | 13.5847 | 22.1266 | |
| 37.0818 | 85.7518 | 91.5451 | 11.7814 | 9.9014 | 18.9313 | |
| 1.2695 | 3.4885 | 2.4792 | 5.6429 | 7.1777 | 10.4984 | |
| 2.7745 | 1.3591 | 2.4656 | 0.1992 | 0.0772 | 0.0959 | |
| 94.9803 | 55.2887 | 66.7736 | 95.4184 | 55.9382 | 53.2052 |
| Controller | SPI | SPID | PI | PID | PIDA | PIDAJ |
|---|---|---|---|---|---|---|
| 7.8032 | 4.8093 | 4.6555 | 3.3136 | 2.8161 | 2.5935 | |
| 3.9458 | 13.4804 | 12.6906 | 1.7935 | 1.7950 | 3.8461 | |
| 0.0428 | 2.4693 | 1.9083 | 18.7217 | 8.5841 | 15.8702 | |
| 30.7900 | 64.8315 | 59.0811 | 5.9429 | 5.0548 | 9.9748 | |
| 0.0334 | 1.1876 | 0.8884 | 6.2037 | 2.4174 | 4.1159 | |
| 1.1416 | 0.3468 | 0.2775 | 0.0072 | 0.0032 | 0.0045 | |
| 1.2392 | 6.3532 | 4.1732 | 7.4794 | 1.5203 | 1.8621 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huba, M.; Vrancic, D. Extending the Model-Based Controller Design to Higher-Order Plant Models and Measurement Noise. Symmetry 2021, 13, 798. https://doi.org/10.3390/sym13050798
Huba M, Vrancic D. Extending the Model-Based Controller Design to Higher-Order Plant Models and Measurement Noise. Symmetry. 2021; 13(5):798. https://doi.org/10.3390/sym13050798
Chicago/Turabian StyleHuba, Mikulas, and Damir Vrancic. 2021. "Extending the Model-Based Controller Design to Higher-Order Plant Models and Measurement Noise" Symmetry 13, no. 5: 798. https://doi.org/10.3390/sym13050798
APA StyleHuba, M., & Vrancic, D. (2021). Extending the Model-Based Controller Design to Higher-Order Plant Models and Measurement Noise. Symmetry, 13(5), 798. https://doi.org/10.3390/sym13050798