
Gait Symmetry Analysis Based on Dynamic Time Warping



Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants and Procedures
2.2. Data Analysis
3. Results
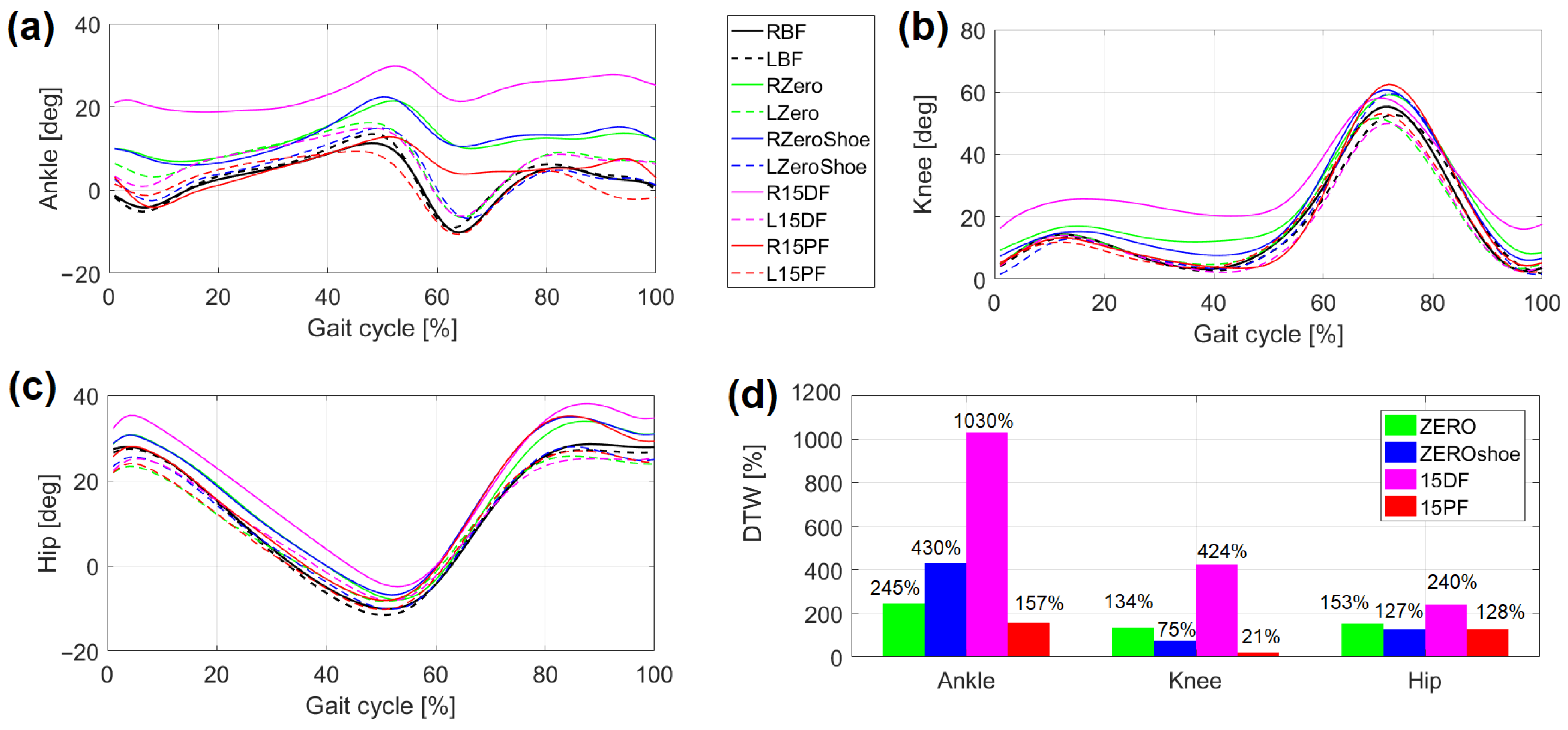
3.1. Kinematic Parameters
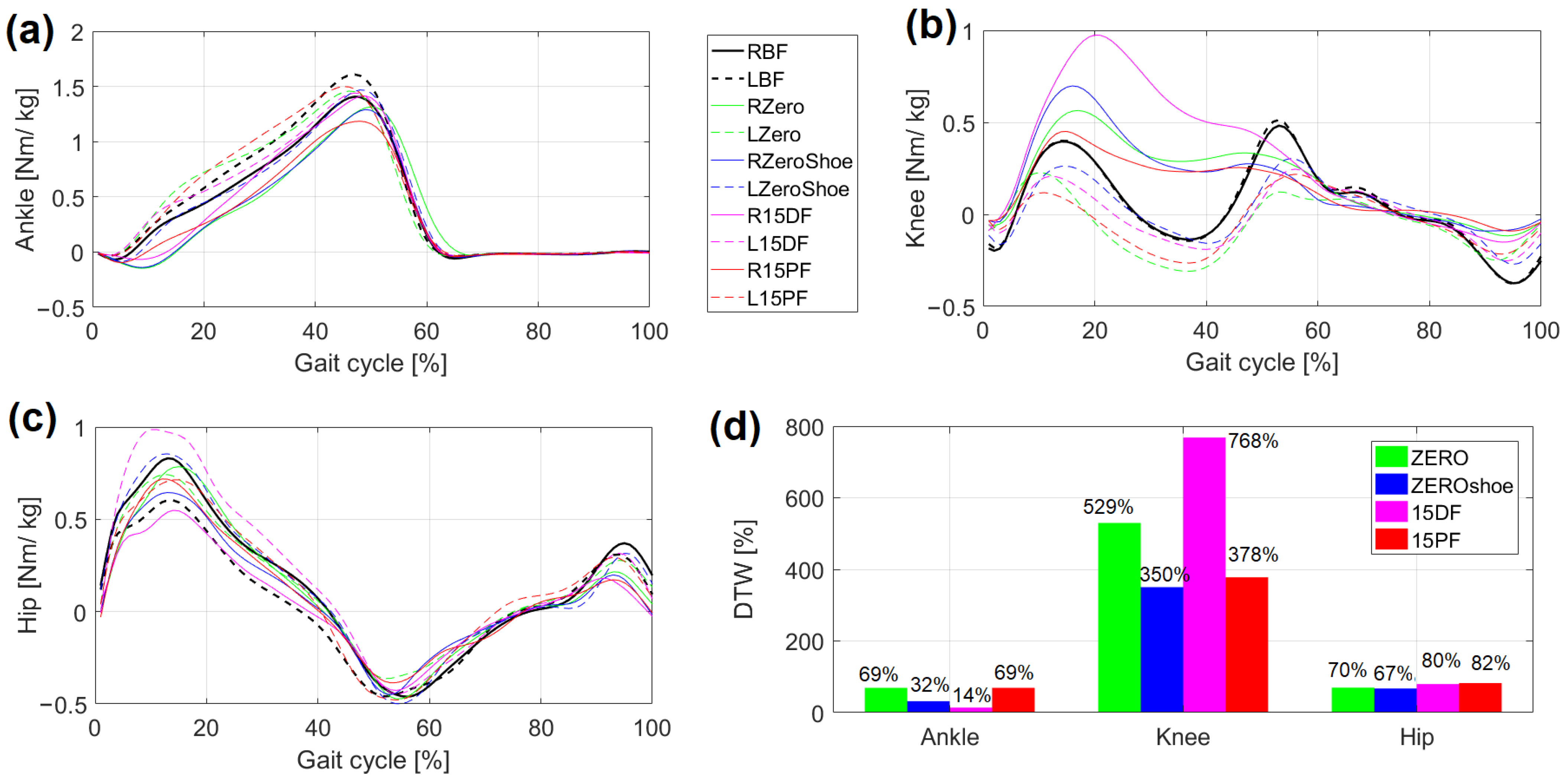
3.2. Kinetic Parameters
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gulgin, H.; Hall, K.; Luzadre, A.; Kayfish, E. 3D gait analysis with and without an orthopedic walking boot. Gait Posture 2018, 59, 76–82. [Google Scholar] [CrossRef]
- Severin, A.C.; Gean, R.P.; Barnes, S.G.; Queen, R.; Butler, R.J.; Martin, R.; Barnes, C.L.; Mannen, E.M. Effects of a corrective heel lift with an orthopaedic walking boot on joint mechanics and symmetry during gait. Gait Posture 2019, 73, 233–238. [Google Scholar] [CrossRef]
- Zhang, S.; Clowers, K.G.; Powell, D. Ground reaction force and 3D biomechanical characteristics of walking in short-leg walkers. Gait Posture 2006, 24, 487–492. [Google Scholar] [CrossRef]
- Richards, J.; Payne, K.; Myatt, D.; Chohan, A. Do orthotic walkers affect knee and hip function during gait? Prosthet. Orthot. Int. 2016, 40, 137–141. [Google Scholar] [CrossRef] [Green Version]
- Lann Vel Lace, K.; Błażkiewicz, M. A review of the effect of a Walker ankle-foot orthosis on gait biomechanics in healthy individuals. Adv. Rehabil. Postępy Rehabil. 2021. [Google Scholar] [CrossRef]
- McHenry, B.D.; Exten, E.L.; Cross, J.A.; Kruger, K.M.; Law, B.; Fritz, J.M.; Harris, G. Sagittal Subtalar and Talocrural Joint Assessment During Ambulation With Controlled Ankle Movement (CAM) Boots. Foot Ankle Int. 2017, 38, 1260–1266. [Google Scholar] [CrossRef]
- Keene, D.J.; Willett, K.; Lamb, S.E. The Immediate Effects of Different Types of Ankle Support Introduced 6 Weeks After Surgical Internal Fixation for Ankle Fracture on Gait and Pain: A Randomized Crossover Trial. J. Orthop. Sports Phys. 2016, 46, 157–167. [Google Scholar] [CrossRef] [PubMed]
- Zellers, J.A.; Tucker, L.A.; Higginson, J.S.; Manal, K.; Silbernagel, K.G. Changes in gait mechanics and muscle activity with wedge height in an orthopaedic boot. Gait Posture 2019, 70, 59–64. [Google Scholar] [CrossRef] [PubMed]
- Vanderpool, M.T.; Collins, S.H.; Kuo, A.D. Ankle fixation need not increase the energetic cost of human walking. Gait Posture 2008, 28, 427–433. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Viteckova, S.; Kutilek, P.; Svoboda, Z.; Krupicka, R.; Kauler, J.; Szabo, Z. Gait symmetry measures: A review of current and prospective methods. Biomed. Signal. Process. Control 2018, 42, 89–100. [Google Scholar] [CrossRef]
- Blazkiewicz, M.; Wiszomirska, I.; Wit, A. Comparison of four methods of calculating the symmetry of spatial-temporal parameters of gait. Acta Bioeng. Biomech. 2014, 16, 29–35. [Google Scholar]
- Crenshaw, S.J.; Richards, J.G. A method for analyzing joint symmetry and normalcy, with an application to analyzing gait. Gait Posture 2006, 24, 515–521. [Google Scholar] [CrossRef] [PubMed]
- Goswami, A. A new gait parameterization technique by means of cyclogram moments: Application to human slope walking. Gait Posture 1998, 8, 15–36. [Google Scholar] [CrossRef]
- Shorter, K.A.; Polk, J.D.; Rosengren, K.S.; Hsiao-Wecksler, E.T. A new approach to detecting asymmetries in gait. Clin. Biomech. 2008, 23, 459–467. [Google Scholar] [CrossRef]
- Sant’anna, A.; Wickström, N. A symbol-based approach to gait analysis from acceleration signals: Identification and detection of gait events and a new measure of gait symmetry. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 1180–1187. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liao, F.; Wang, J.; He, P. Multi-resolution entropy analysis of gait symmetry in neurological degenerative diseases and amyotrophic lateral sclerosis. Med. Eng. Phys. 2008, 30, 299–310. [Google Scholar] [CrossRef] [PubMed]
- Xie, H.-B.; Zheng, Y.-P.; Guo, J.-Y.; Chen, X. Cross-fuzzy entropy: A new method to test pattern synchrony of bivariate time series. Inf. Sci. 2010, 180, 1715–1724. [Google Scholar] [CrossRef]
- Park, K.; Dankowicz, H.; Hsiao-Wecksler, E.T. Characterization of spatiotemporally complex gait patterns using cross-correlation signatures. Gait Posture 2012, 36, 120–126. [Google Scholar] [CrossRef] [PubMed]
- Hoerzer, S.; Federolf, P.A.; Maurer, C.; Baltich, J.; Nigg, B.M. Footwear Decreases Gait Asymmetry during Running. PLoS ONE 2015, 10, e0138631. [Google Scholar] [CrossRef] [PubMed]
- Blazkiewicz, M.; Wit, A. Comparison of sensitivity coefficients for joint angle trajectory between normal and pathological gait. Acta Bioeng. Biomech. 2012, 14, 83–91. [Google Scholar]
- Gaspar, M.; Welke, B.; Seehaus, F.; Hurschler, C.; Schwarze, M. Dynamic Time Warping compared to established methods for validation of musculoskeletal models. J. Biomech. 2017, 55, 156–161. [Google Scholar] [CrossRef] [PubMed]
- Barth, J.; Oberndorfer, C.; Pasluosta, C.; Schulein, S.; Gassner, H.; Reinfelder, S.; Kugler, P.; Schuldhaus, D.; Winkler, J.; Klucken, J.; et al. Stride segmentation during free walk movements using multi-dimensional subsequence dynamic time warping on inertial sensor data. Sensors 2015, 15, 6419–6440. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.S. Application of dynamic time warping algorithm for pattern similarity of gait. J. Exerc. Rehabil. 2019, 15, 526–530. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gilbert, J.M.; Rybchenko, S.I.; Hofe, R.; Ell, S.R.; Fagan, M.J.; Moore, R.K.; Green, P. Isolated word recognition of silent speech using magnetic implants and sensors. Med. Eng. Phys. 2010, 32, 1189–1197. [Google Scholar] [CrossRef]
- Efrat, A.; Fan, Q.; Venkatasubramanian, S. Curve Matching, Time Warping, and Light Fields: New Algorithms for Computing Similarity between Curves. J. Math. Imaging Vis. 2007, 27, 203–216. [Google Scholar] [CrossRef] [Green Version]
- Bautista, M.A.; Hernandez-Vela, A.; Escalera, S.; Igual, L.; Pujol, O.; Moya, J.; Violant, V.; Anguera, M.T. A Gesture Recognition System for Detecting Behavioral Patterns of ADHD. IEEE Trans. Cybern. 2016, 46, 136–147. [Google Scholar] [CrossRef] [Green Version]
- Shokoohi-Yekta, M.; Hu, B.; Jin, H.; Wang, J.; Keogh, E. Generalizing DTW to the multi-dimensional case requires an adaptive approach. Data Min. Knowl. Discov. 2017, 31, 1–31. [Google Scholar] [CrossRef] [Green Version]
- Vial, J.; Nocairi, H.; Sassiat, P.; Mallipatu, S.; Cognon, G.; Thiebaut, D.; Teillet, B.; Rutledge, D.N. Combination of dynamic time warping and multivariate analysis for the comparison of comprehensive two-dimensional gas chromatograms: Application to plant extracts. J. Chromatogr. A 2009, 1216, 2866–2872. [Google Scholar] [CrossRef]
- AbdelMaseeh, M.; Chen, T.; Stashuk, D.W. Extraction and Classification of Multichannel Electromyographic Activation Trajectories for Hand Movement Recognition. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 662–673. [Google Scholar] [CrossRef] [PubMed]
- Pulido-Valdeolivas, I.; Gómez-Andrés, D.; Martín-Gonzalo, J.A.; Rodríguez-Andonaegui, I.; López-López, J.; Pascual-Pascual, S.I.; Rausell, E. Gait phenotypes in paediatric hereditary spastic paraplegia revealed by dynamic time warping analysis and random forests. PLoS ONE 2018, 13, e0192345. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Tian, S.; Sun, L.; Chen, X. Gait Analysis for Post-Stroke Hemiparetic Patient by Multi-Features Fusion Method. Sensors 2019, 19, 1737. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Clemens, S.; Kim, K.J.; Gailey, R.; Kirk-Sanchez, N.; Kristal, A.; Gaunaurd, I. Inertial sensor-based measures of gait symmetry and repeatability in people with unilateral lower limb amputation. Clin. Biomech. 2020, 72, 102–107. [Google Scholar] [CrossRef] [PubMed]
- Ghaderyan, P.; Ghoreshi Beyrami, S.M.G. Neurodegenerative diseases detection using distance metrics and sparse coding: A new perspective on gait symmetric features. Comput. Biol. Med. 2020, 120, 103736. [Google Scholar] [CrossRef]
- Weiske, F.; Böhme, M.; Jäkel, J.; Zentner, J.; Witt, M. Stair ascent comparison of lower limb kinematics with differing time normalization techniques. J. Biomech. 2021, 119, 110316. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
| Gait | Ankle | Knee | Hip |
|---|---|---|---|
| BF | 148.27 ± 86.09 | 163.11 ± 82.56 | 126.34 ± 86.42 |
| ZERO | 511.55 ± 240.57 | 381.36 ± 196.06 | 320 ± 145.28 |
| BF vs. ZERO (p value) | p = 0.0001 * | p = 0.0095 * | p = 0.0015 * |
| ZEROshoe | 785.81 ± 340.41 | 286.14 ± 182.38 | 287.39 ± 168.75 |
| BF vs. ZEROshoe (p value) | p = 0.0001 * | p = 0.2598 | p = 0.0355 * |
| 15DF | 1675.55 ± 356.56 | 854.69 ± 461.49 | 429.21 ± 161.17 |
| BF vs. 15DF (p value) | p = 0.0001 * | p = 0.0001 * | p = 0.0001 * |
| 15PF | 381.73 ± 102.9 | 197.14 ± 97.5 | 288.18 ± 134.71 |
| BF vs. 15PF (p value) | p = 0.0795 | p = 0.4512 | p = 0.0111 * |
| Gait | Ankle | Knee | Hip |
|---|---|---|---|
| BF | 3.27 ± 2.06 | 2.67 ± 1.16 | 8.16 ± 5.22 |
| ZERO | 5.53 ± 4.53 | 16.81 ± 6.84 | 13.85 ± 4.31 |
| BF vs. ZERO (p value) | p = 0.8269 | p = 0.0001 * | p = 0.0244 * |
| ZEROshoe | 4.31 ± 3.89 | 12.02 ± 3.83 | 13.66 ± 4.4 |
| BF vs. ZEROshoe (p value) | p = 0.8945 | p = 0.0001 * | p = 0.0210 * |
| 15DF | 3.73 ± 2.64 | 23.18 ± 9.81 | 14.66 ± 6.42 |
| BF vs. 15DF (p value) | p = 0.9821 | p = 0.0001 * | p = 0.0067 * |
| 15PF | 5.53 ± 3.04 | 12.76 ± 5.8 | 14.89 ± 4.49 |
| BF vs. 15PF (p value) | p = 0.0585 | p = 0.0002 * | p = 0.0024 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Błażkiewicz, M.; Lann Vel Lace, K.; Hadamus, A. Gait Symmetry Analysis Based on Dynamic Time Warping. Symmetry 2021, 13, 836. https://doi.org/10.3390/sym13050836
Błażkiewicz M, Lann Vel Lace K, Hadamus A. Gait Symmetry Analysis Based on Dynamic Time Warping. Symmetry. 2021; 13(5):836. https://doi.org/10.3390/sym13050836
Chicago/Turabian StyleBłażkiewicz, Michalina, Karol Lann Vel Lace, and Anna Hadamus. 2021. "Gait Symmetry Analysis Based on Dynamic Time Warping" Symmetry 13, no. 5: 836. https://doi.org/10.3390/sym13050836
APA StyleBłażkiewicz, M., Lann Vel Lace, K., & Hadamus, A. (2021). Gait Symmetry Analysis Based on Dynamic Time Warping. Symmetry, 13(5), 836. https://doi.org/10.3390/sym13050836