
Control Theory Application for Swing Up and Stabilisation of Rotating Inverted Pendulum


Abstract
:1. Introduction
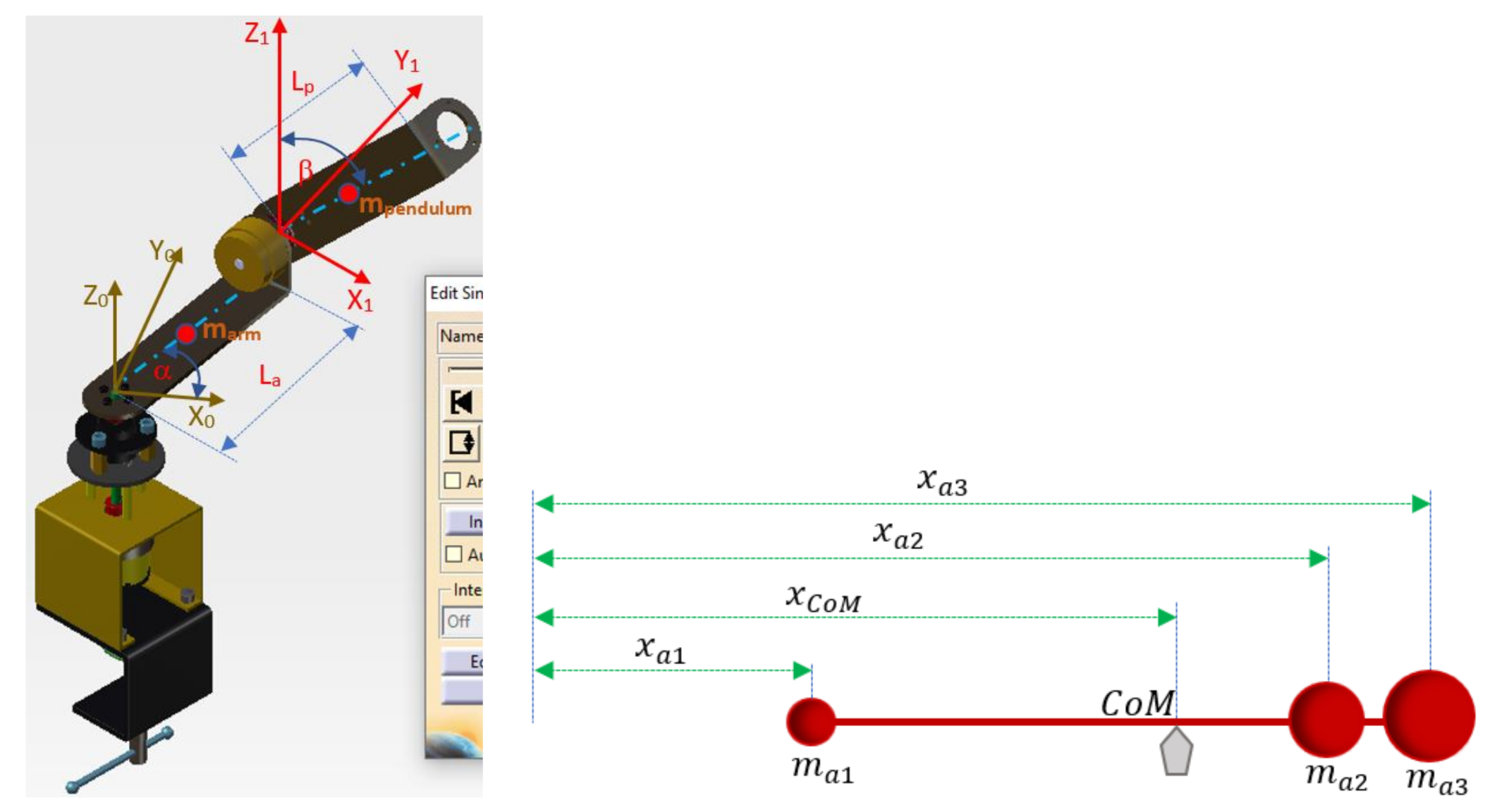
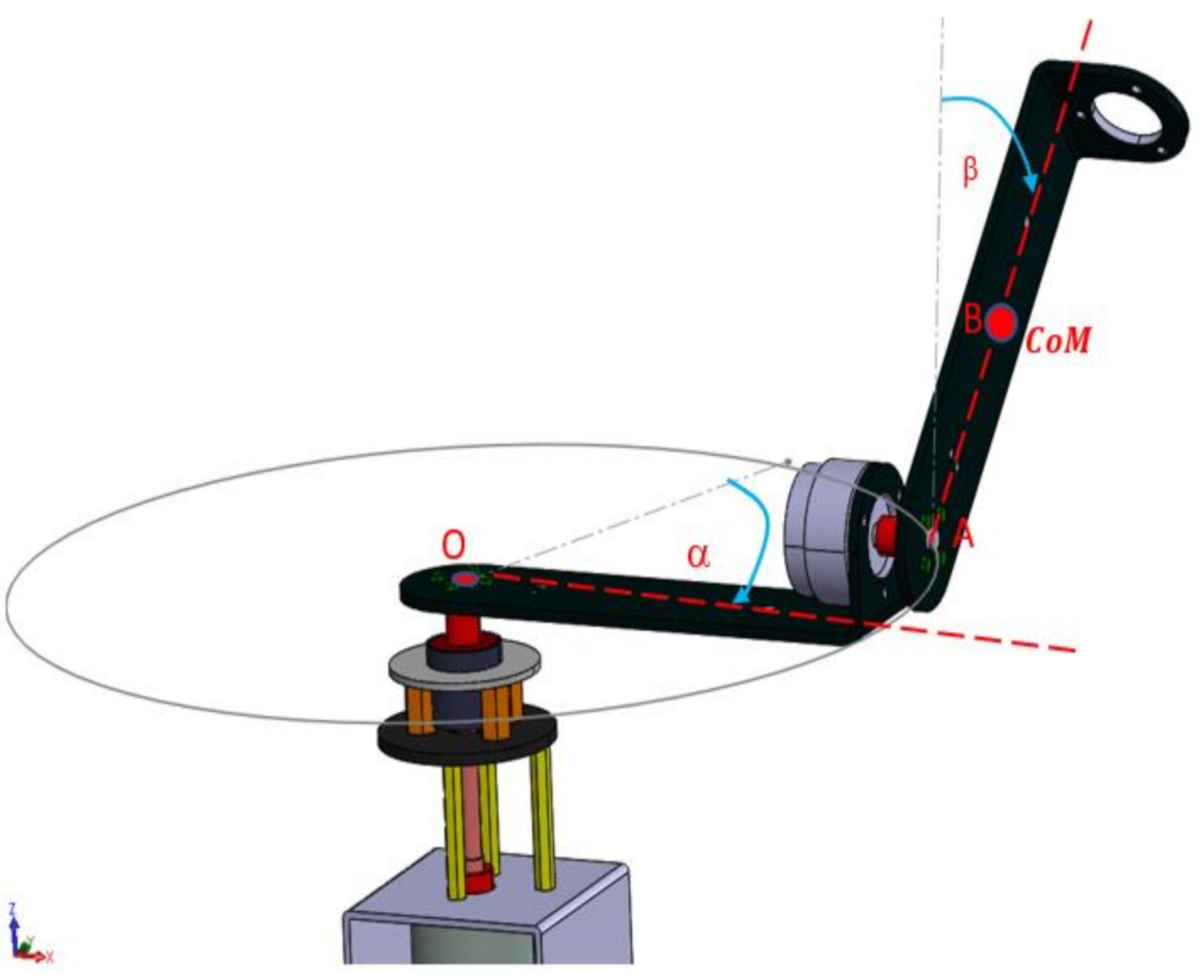
2. Rotary Inverted Pendulum
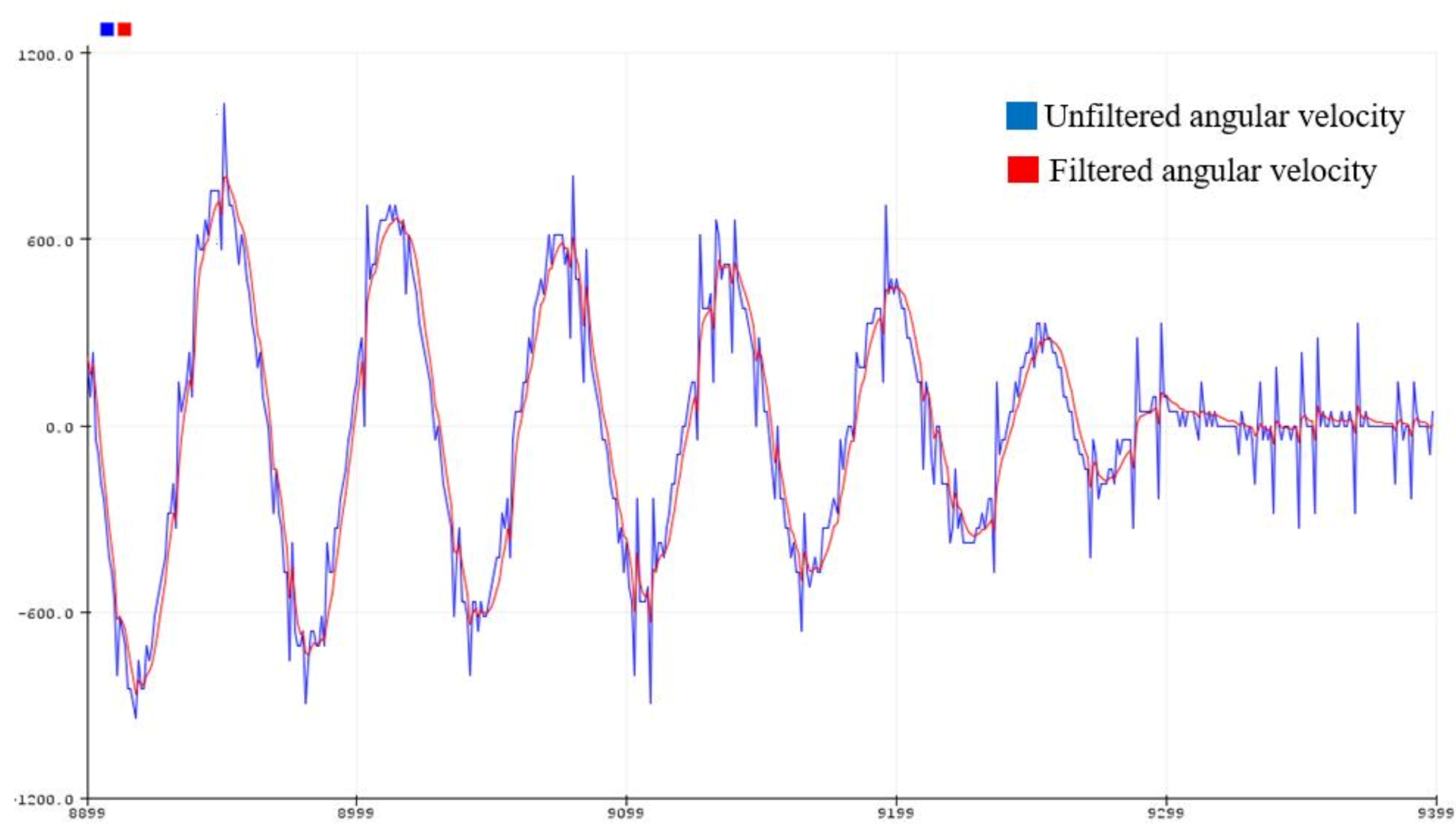
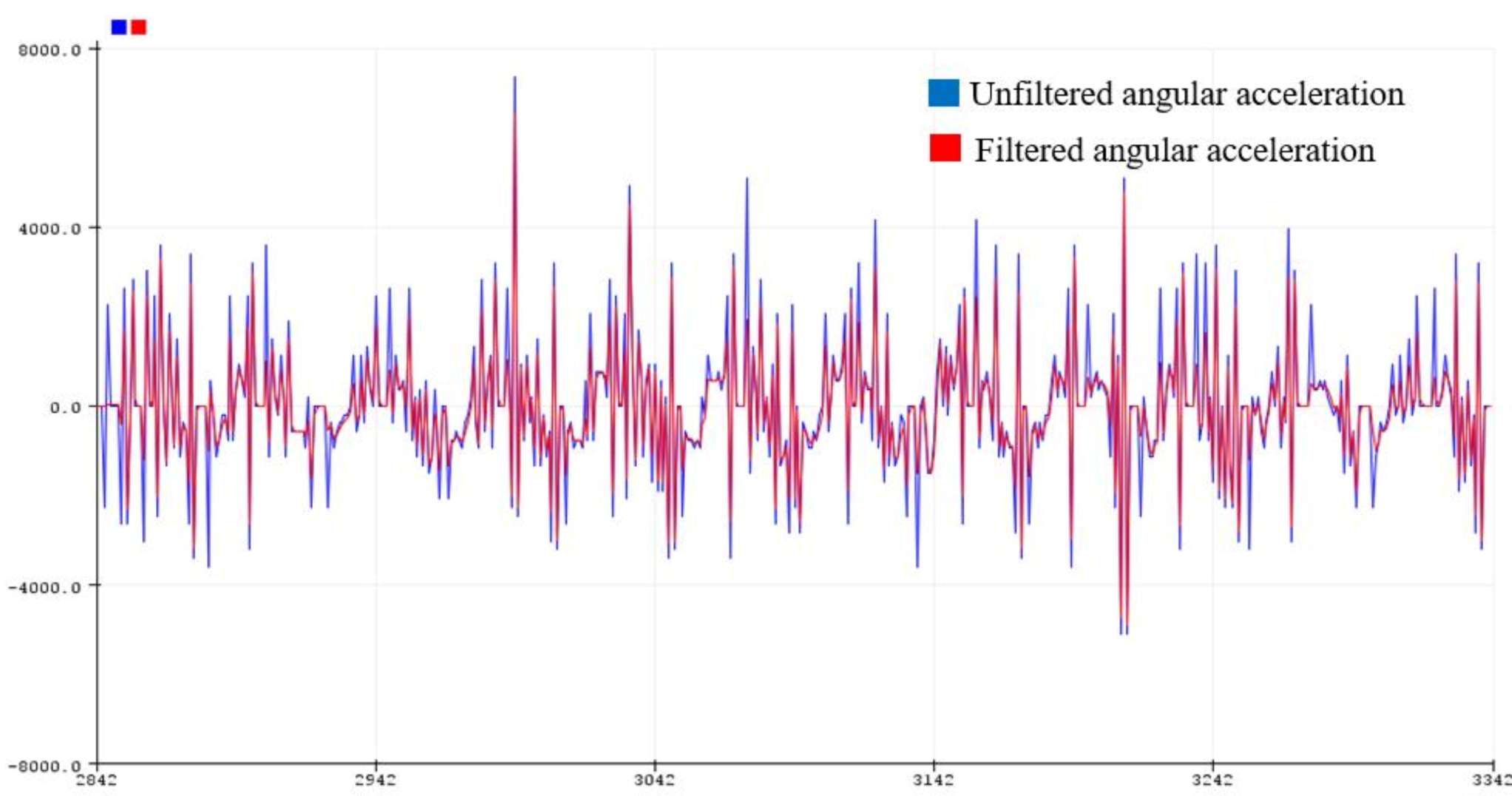
| Algorithm 1 Description of the filtered angular velocity/acceleration. | |
| Input: angular position, angular velocity, angular acceleration Output: | |
| for | |
| = | |
| end | |
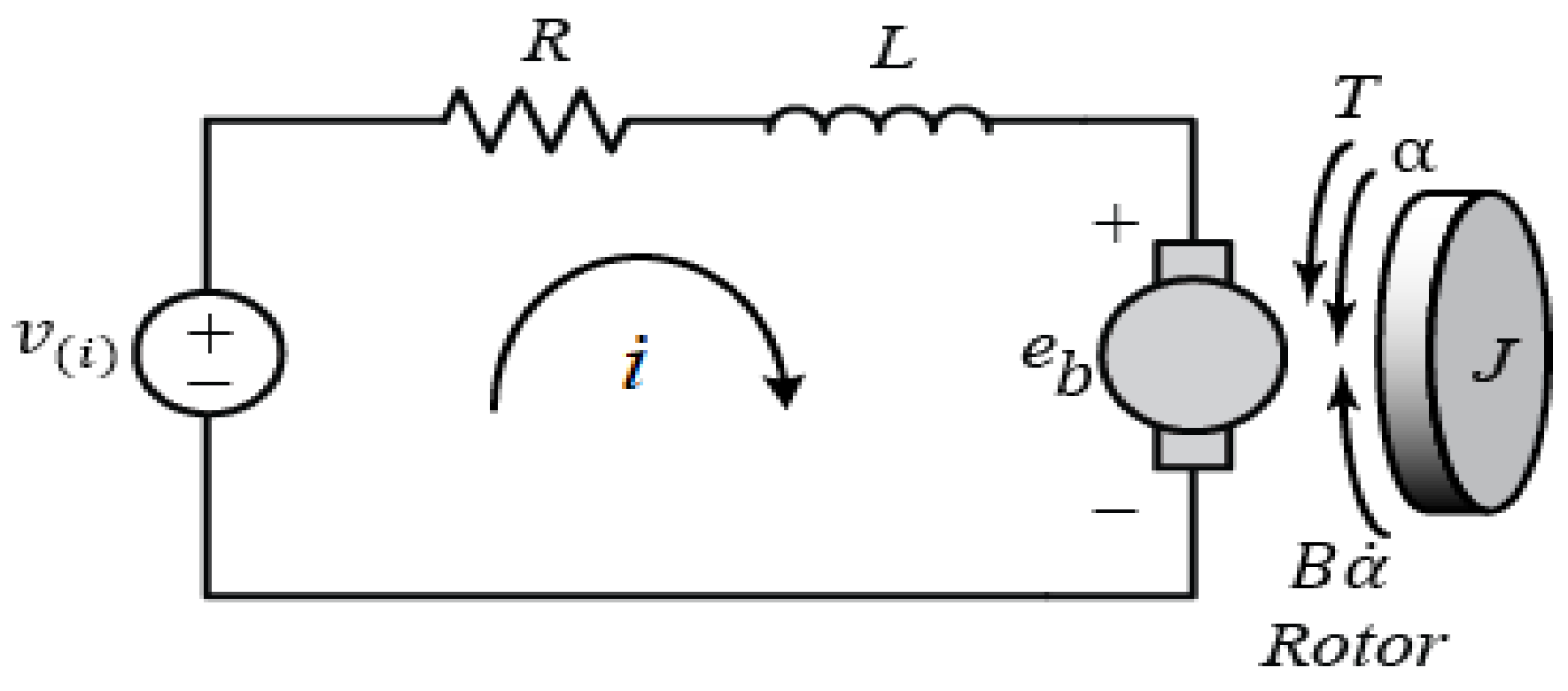
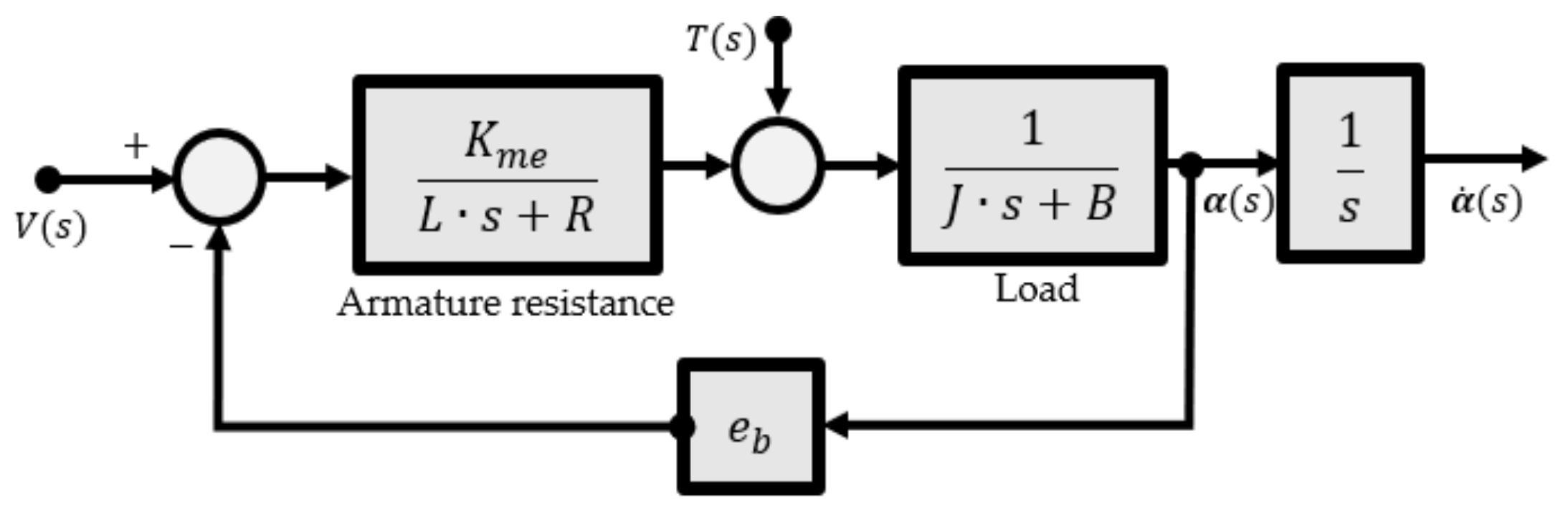
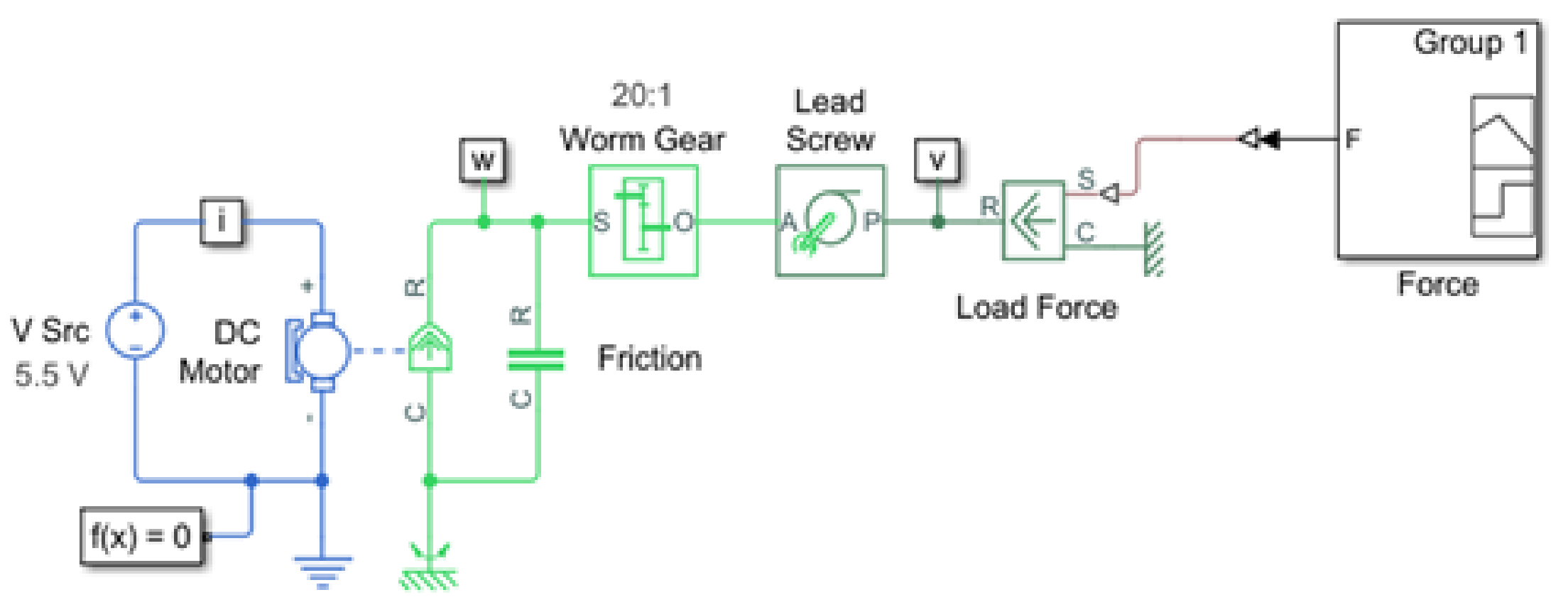
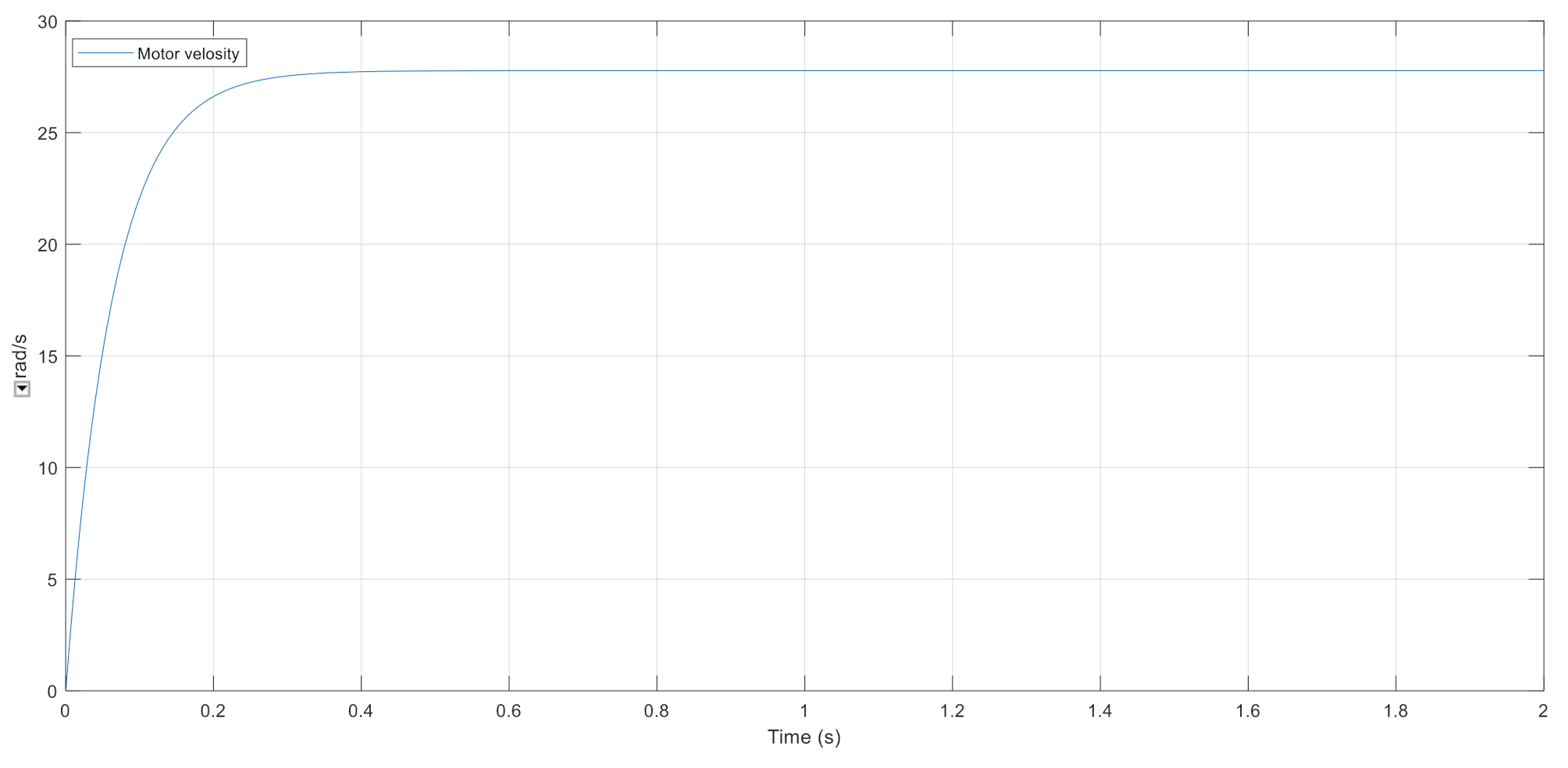
3. DC Motor Modelling
4. Rotary Inverted Pendulum Dynamics
5. Swing-Up and Stabilisation of RIP
6. Simulation Results
7. Experimental Results
| Algorithm 2 Parameters and description of the calculation of angle/velocity. |
| Input: |
| for do if = 0 or > −1 and then // calculate the pendulum angle end if if then // calculate the pendulum velocity else // use last velocity updated |
| end if end for end Output: |
| Algorithm 3 Description of the calculation parameteres for swing up. |
| Input: for l = 0:k do if k = 0 or then use last updated. ang = . end if if k > 0 then ang = the calculation parameters for swing up end if end for |
| end Output: through position we control the angle of the pendulum |
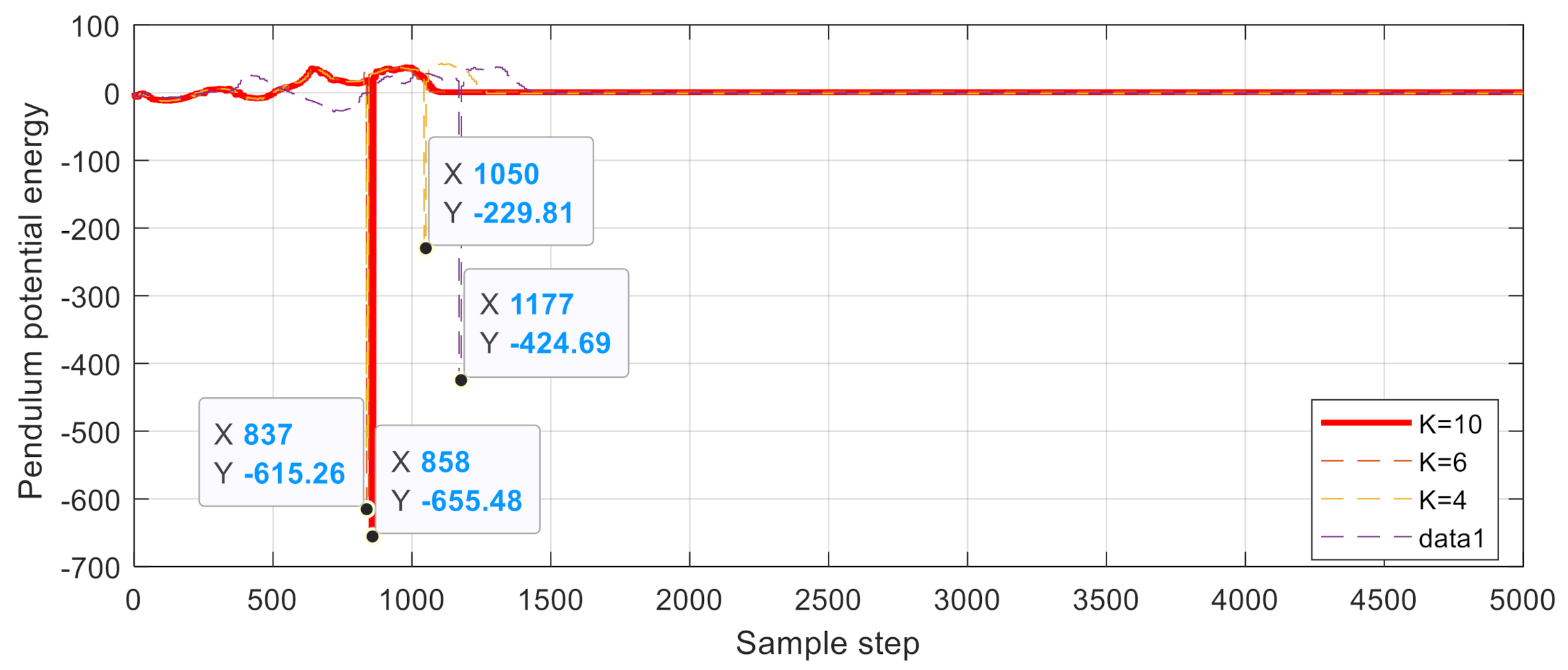
| Algorithm 4 Calculation of potential energy and torque. |
for l = 0:k do if end if if k > 0 then else end if end if end if end for |
| end |
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| RIP | Rotary Inverted Pendulum |
| RIPS | Rotary Inverted Pendulum System |
| LQR | Linear Quadratic Regulator |
| COM | Centre of Mass |
| DC | Direct Current |
| PID | Proportional Integral Derivative |
References
- Yang, X.; Zheng, X. Swing-Up and Stabilization Control Design for an Underactuated Rotary Inverted Pendulum System: Theory and Experiments. IEEE Trans. Ind. Electron. 2018, 65, 7229–7238. [Google Scholar] [CrossRef]
- Davison, E.J. (Ed.) Benchmark Problems for Control System Design: Report of the IFAC Theory Committee; International Federation of Automatic Control: Laxenburg, Austria, 1990. [Google Scholar]
- Wiener, N. Cybernetics or Control and Communication in the Animal and the Machine; Technology Press: Cambridge, MA, USA, 1948. [Google Scholar]
- Powers, W.T.; Clark, R.K.; Mc Farland, R.L. A General Feedback Theory of Human Behavior: Part I. Percept. Mot. Skills 1960, 11, 71–88. [Google Scholar] [CrossRef]
- Chawla, I.; Singla, A. Real-Time Control of a Rotary Inverted Pendulum using Robust LQR-based ANFIS Controller. Int. J. Nonlinear Sci. Numer. Simul. 2018, 19, 379–389. [Google Scholar] [CrossRef]
- Johnson, T.; Zhou, S.; Cheah, W.; Mansell, W.; Young, R.; Watson, S. Implementation of a Perceptual Controller for an Inverted Pendulum Robot. J. Intell. Robot. Syst. 2020, 99, 683–692. [Google Scholar] [CrossRef] [Green Version]
- Ismail, J.; Liu, S. Efficient Planning of Optimal Trajectory for a Furuta Double Pendulum Using Discrete Mechanics and Optimal Control. IFAC-PapersOnLine 2017, 50, 10456–10461. [Google Scholar] [CrossRef]
- Saleem, O.; Mahmood-Ul-Hasan, K. Robust stabilisation of rotary inverted pendulum using intelligently optimised nonlinear self-adaptive dual fractional-order PD controllers. Int. J. Syst. Sci. 2019, 50, 1399–1414. [Google Scholar] [CrossRef]
- Wen, J.; Shi, Y.; Lu, X. Stabilizing a Rotary Inverted Pendulum Based on Logarithmic Lyapunov Function. J. Control Sci. Eng. 2017, 2017, 1–11. [Google Scholar] [CrossRef]
- Wang, J.-J. Simulation studies of inverted pendulum based on PID controllers. Simul. Model. Pract. Theory 2011, 19, 440–449. [Google Scholar] [CrossRef]
- Prasad, L.B.; Tyagi, B.; Gupta, H.O. Optimal Control of Nonlinear Inverted Pendulum System Using PID Controller and LQR: Performance Analysis Without and With Disturbance Input. Int. J. Autom. Comput. 2014, 11, 661–670. [Google Scholar] [CrossRef] [Green Version]
- Bettou, K.; Charef, A. Control quality enhancement using fractional PIλDμ controller. Int. J. Syst. Sci. 2009, 40, 875–888. [Google Scholar] [CrossRef]
- Dwivedi, P.; Pandey, S.; Junghare, A. Novel fractional order PDμ controller for open-loop unstable inverted pendulum system. In Proceedings of the 17th International Conference on control, Automation and Systems, Jeju, Korea, 18–21 October 2017; 2017; pp. 1616–1621. [Google Scholar]
- Dwivedi, P.; Pandey, S.; Junghare, A. Performance analysis and experimental validation of 2-DOF fractional order controller for under actuated rotary inverted pendulum. Arab. J. Sci. Eng. 2017, 42, 5121–5145. [Google Scholar] [CrossRef]
- Dwivedi, P.; Pandey, S.; Junghare, A.S. Stabilization of unstable equilibrium point of rotary inverted pendulum using fractional controller. J. Frankl. Inst. 2017, 354, 7732–7766. [Google Scholar] [CrossRef]
- Dwivedi, P.; Pandey, S.; Junghare, A. Robust and novel two degree of freedom fractional controller based on two-loop topology for inverted pendulum. ISA Trans. 2018, 75, 189–206. [Google Scholar] [CrossRef] [PubMed]
- Shang, W.W.; Cong, S.; Li, Z.; Jiang, S.L. Augmented Nonlinear PD Controller for a Redundantly Actuated Parallel Manipulator. Adv. Robot. 2009, 23, 1725–1742. [Google Scholar] [CrossRef]
- Ozana, S.; Docekal, T.; Kawala-Sterniuk, A.; Mozaryn, J.; Schlegel, M.; Raj, A. Trajectory Planning for Mechanical Systems Based on Time-Reversal Symmetry. Symmetry 2020, 12, 792. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Control Tutorials. University of Michigan. Available online: https://ctms.engin.umich.edu/CTMS/index.php?example=MotorSpeed§ion=SystemModeling (accessed on 6 March 2021).
- Rotary Inverted Pendulum. Available online: https://www.lehigh.edu/~inconsy/lab/css/ME389/guidelines/ME389_MEM04_PendulumGantry_Guideline.pdf (accessed on 15 May 2021).
- Quanser. Available online: https://www.quanser.com/products/rotary-inverted-pendulum (accessed on 10 May 2021).
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter. 1995. Available online: https://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf (accessed on 10 May 2021).
- Vanicek, P.; Omerbasic, M. Does a navigation algorithm have to use a Kalman filter? CAASJ 1999, 45, 292–296. [Google Scholar]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice Using MATLAB, 3rd ed.; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Jadlovska, S.; Sarnovsky, J. A Complex Overview of Modeling and Control of the Rotary Single Inverted Pendulum System. Adv. Electr. Electron. Eng. 2013, 11, 73–85. [Google Scholar] [CrossRef]
- Durand, S.; Castellanos, J.F.; Marchand, N.; Sanchez, W.F. Event-based control of the inverted pendulum: Swing up and stabilization. J. Control Eng. Appl. Inform. 2013, 15, 96–104. [Google Scholar]
- Da Sanjeewa, S.; Parnichkun, M. Control of rotary double inverted pendulum system using mixed sensitivity H∞ controller. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419833273. [Google Scholar] [CrossRef]
- Yoshida, K. Swing-up control of an inverted pendulum by energy-based methods. In Proceedings of the 1999 American Control Conference (Cat. No. 99CH36251), San Diego, CA, USA, 2–4 June 1999; Volume 6, pp. 4045–4047. [Google Scholar]
- Zhang, X.; Ma, J.; Lin, L.; Wang, L. Study on Swing-up Control of Rotary Inverted Pendulum Based on Energy Feedback. In Proceedings of the 2018 5th International Conference on Information Science and Control Engineering (ICISCE), Zhengzhou, China, 20–22 July 2008; pp. 994–998. [Google Scholar]
- Guo, X.; Zhang, G.; Tian, R. Periodic Solution of a Non-Smooth Double Pendulum with Unilateral Rigid Constrain. Symmetry 2019, 11, 886. [Google Scholar] [CrossRef] [Green Version]
- Edwards, C.; Spurgeon, S. Sliding Mode Control; CRC Press: London, UK, 1998. [Google Scholar] [CrossRef]
- Hong, Q.; Shi, Y.; Chen, Z. Adaptive Sliding Mode Control Based on Disturbance Observer for Placement Pressure Control System. Symmetry 2020, 12, 1057. [Google Scholar] [CrossRef]
- Tomescu, M.; Jäntschi, L.; Rotaru, D. Figures of Graph Partitioning by Counting, Sequence and Layer Matrices. Mathematics 2021, 9, 1419. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
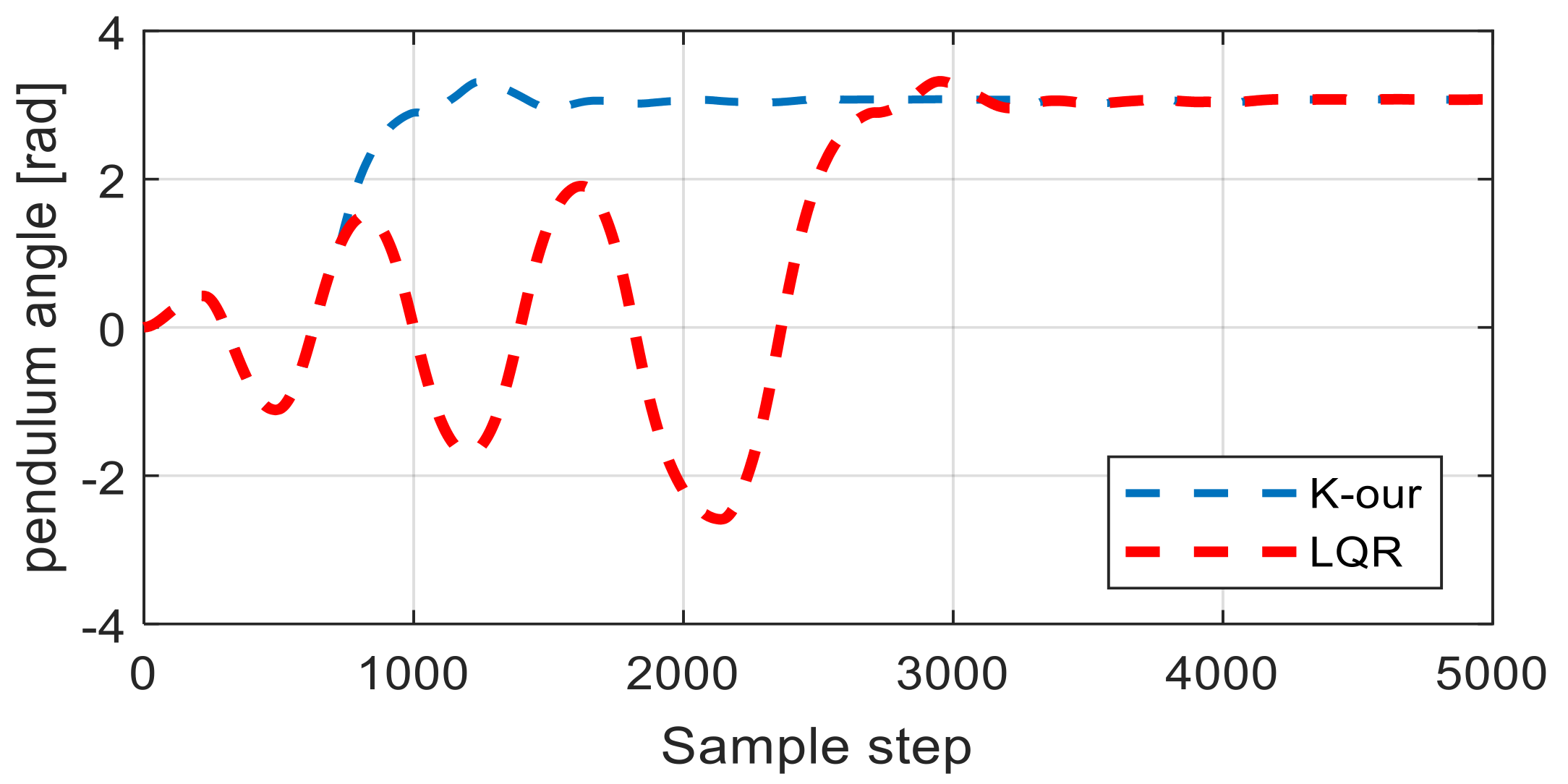
| Definition | Unit | Kour Cont. | Cont. [1] | LQR Cont. | LQR Cont. [1] |
|---|---|---|---|---|---|
| Swing up and stabilisation time | s | 1.53 | 5.4 | 3.35 | 15 |
| Steady-state error | rad | 0.01 | 0.1 | 0.2 | 0.2 |
| Controller saturation time | s | 0.003 | 0.005 | 9 | 13 |
| Definition | Unit | Data |
|---|---|---|
| Swing up and stabilisation time | s | 1.45 |
| Extreme force | N | 2.23 |
| Steady-state error | rad | 0.03 |
| Controller saturation time | s | 0.001 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bajrami, X.; Pajaziti, A.; Likaj, R.; Shala, A.; Berisha, R.; Bruqi, M. Control Theory Application for Swing Up and Stabilisation of Rotating Inverted Pendulum. Symmetry 2021, 13, 1491. https://doi.org/10.3390/sym13081491
Bajrami X, Pajaziti A, Likaj R, Shala A, Berisha R, Bruqi M. Control Theory Application for Swing Up and Stabilisation of Rotating Inverted Pendulum. Symmetry. 2021; 13(8):1491. https://doi.org/10.3390/sym13081491
Chicago/Turabian StyleBajrami, Xhevahir, Arbnor Pajaziti, Ramë Likaj, Ahmet Shala, Rinor Berisha, and Mirlind Bruqi. 2021. "Control Theory Application for Swing Up and Stabilisation of Rotating Inverted Pendulum" Symmetry 13, no. 8: 1491. https://doi.org/10.3390/sym13081491
APA StyleBajrami, X., Pajaziti, A., Likaj, R., Shala, A., Berisha, R., & Bruqi, M. (2021). Control Theory Application for Swing Up and Stabilisation of Rotating Inverted Pendulum. Symmetry, 13(8), 1491. https://doi.org/10.3390/sym13081491