
Analysis of Control Methods for the Traction Drive of an Alternating Current Electric Locomotive

 ,
,
Abstract
:1. Introduction
- -
- Scalar.
- -
- Vector.
- -
- With direct torque control.
- -
- Selection of a mathematical model of a traction motor, which allows us to investigate the operation of the motor in the presence of asymmetry in its windings and in the presence of asymmetry in the power supply system.
- -
- Simulation of the control system of the output converter with scalar and vector control.
- -
- Received starting characteristics for scalar and vector traction drive control system for normal operation.
- -
- The starting characteristics were obtained for the scalar and vector traction drive control system for the emergency (asymmetric) mode: (1) in the traction motor; (2) in the output converter; (3) simultaneously in the traction motor and the output converter.
- -
- The comparison of the obtained starting characteristics.
2. Materials and Methods
3. Results of the Analysis of Control Methods for the Output Converter of the Traction Drive of an AC Electric Locomotive
3.1. Justification of the Choice of a Mathematical Model of an Induction Motor
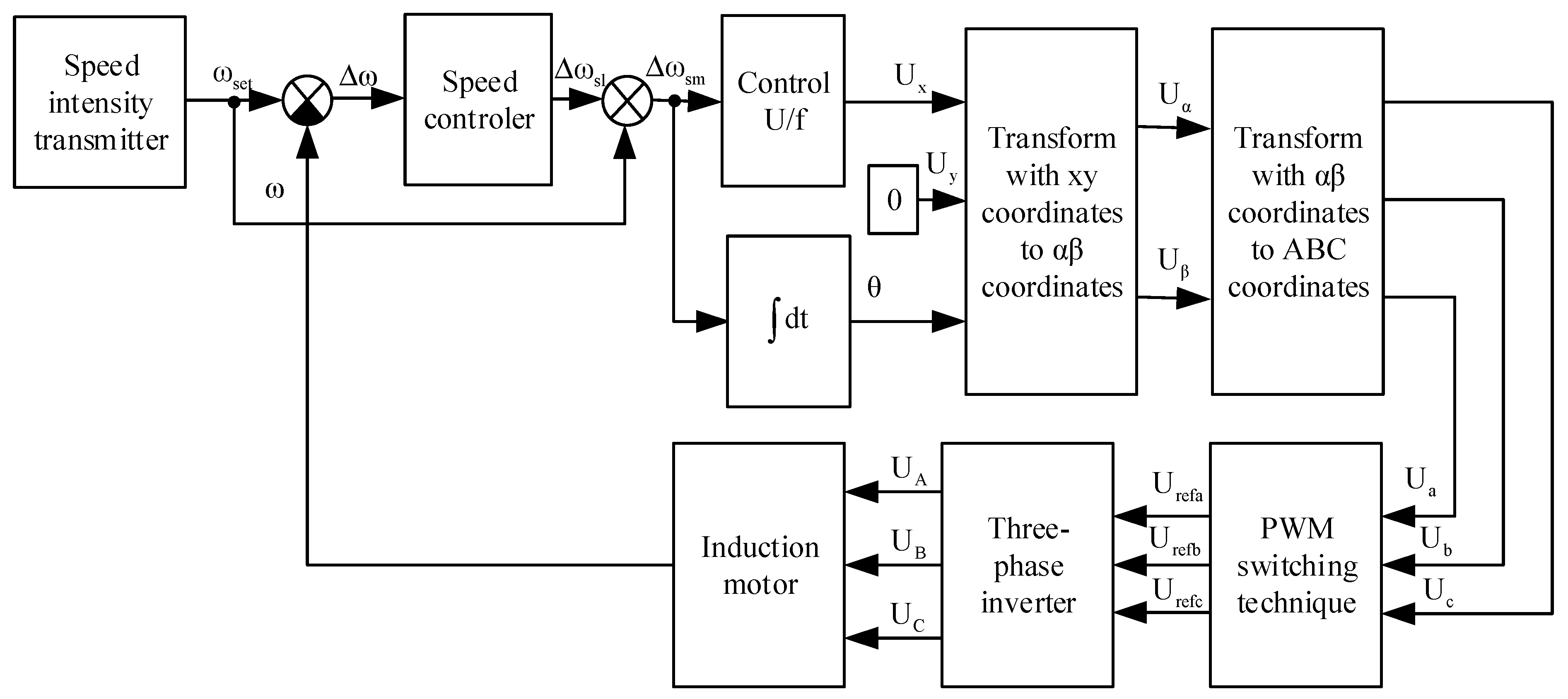
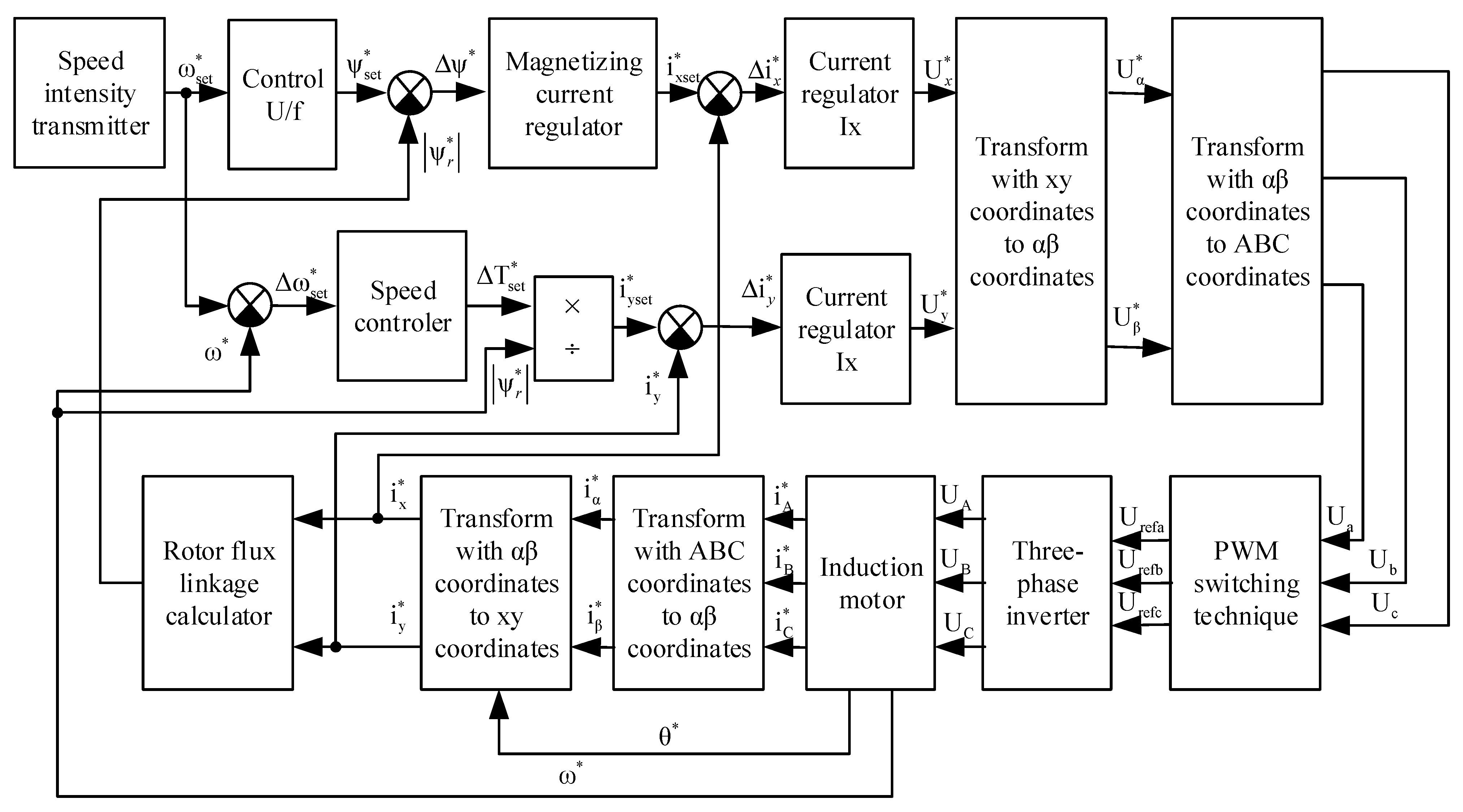
3.2. Simulation of the Control System of the Output Converter with Scalar and Vector Control
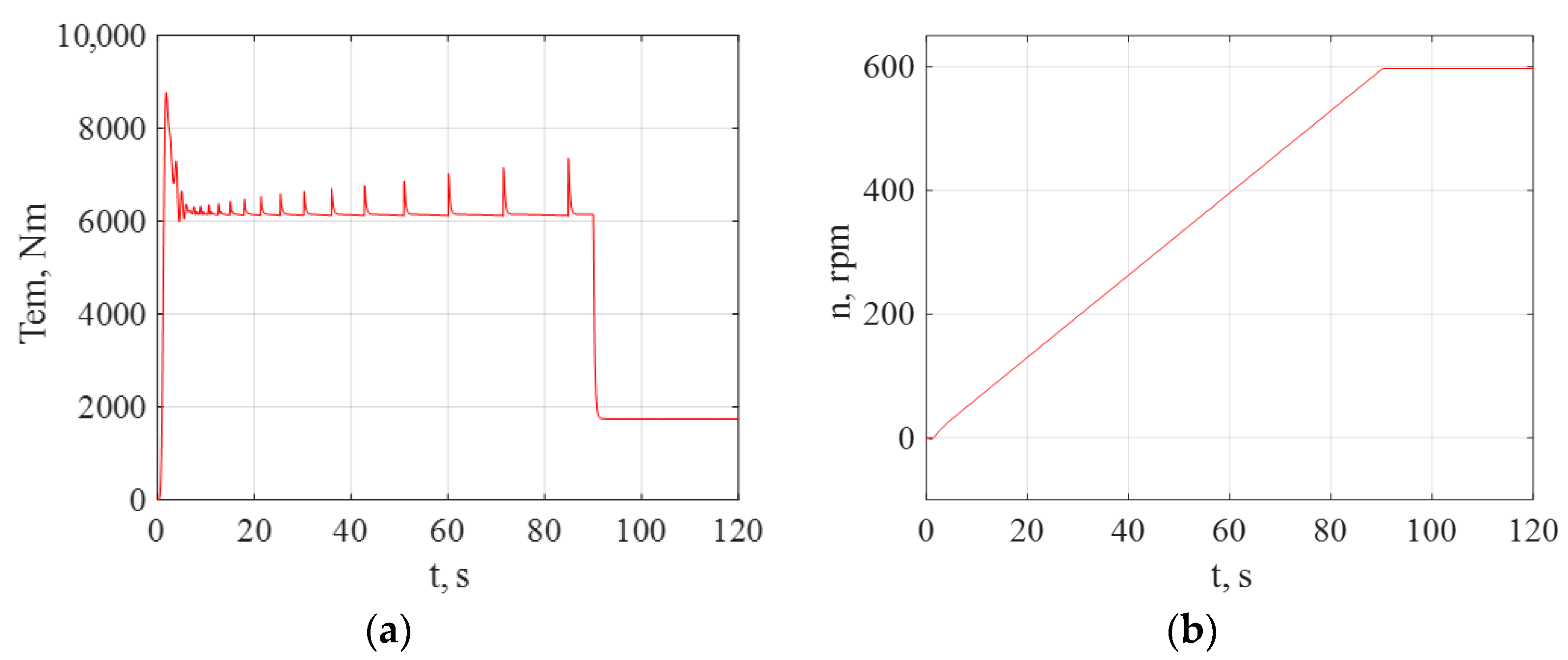
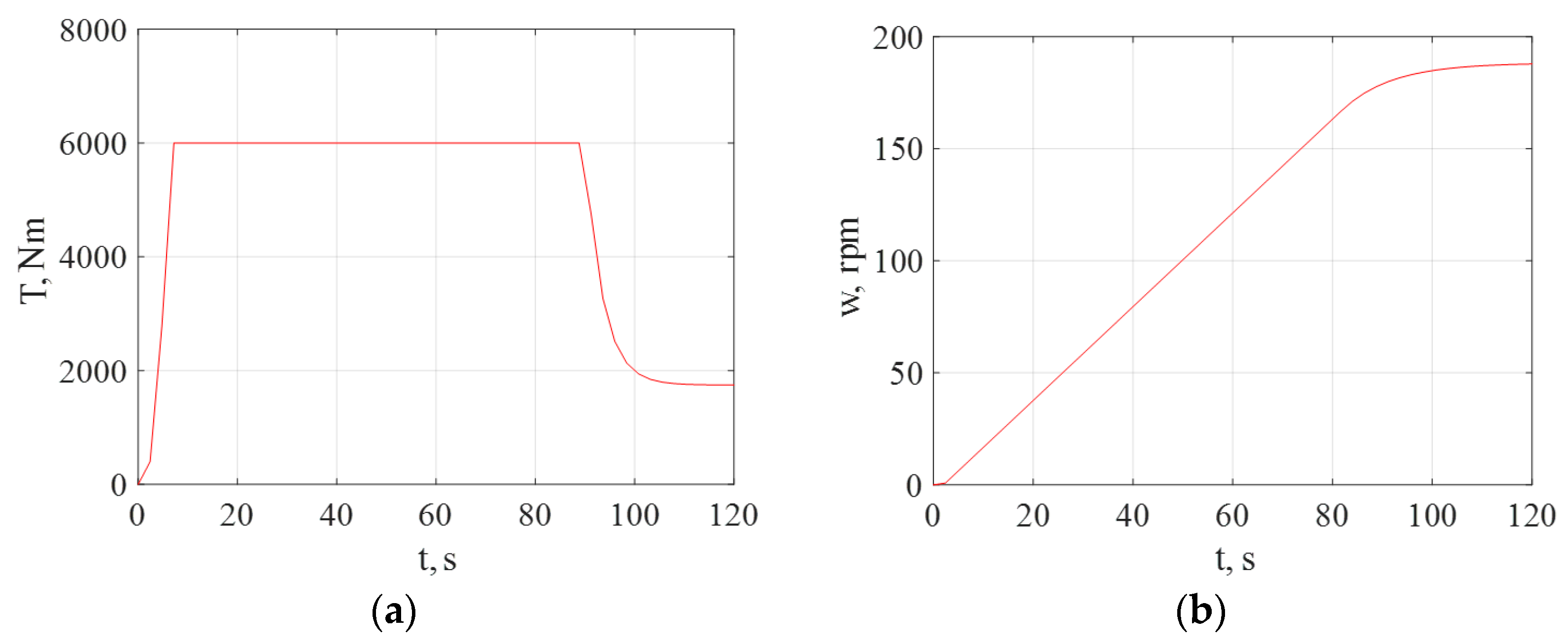
3.3. Simulation Results
4. Discussion
- -
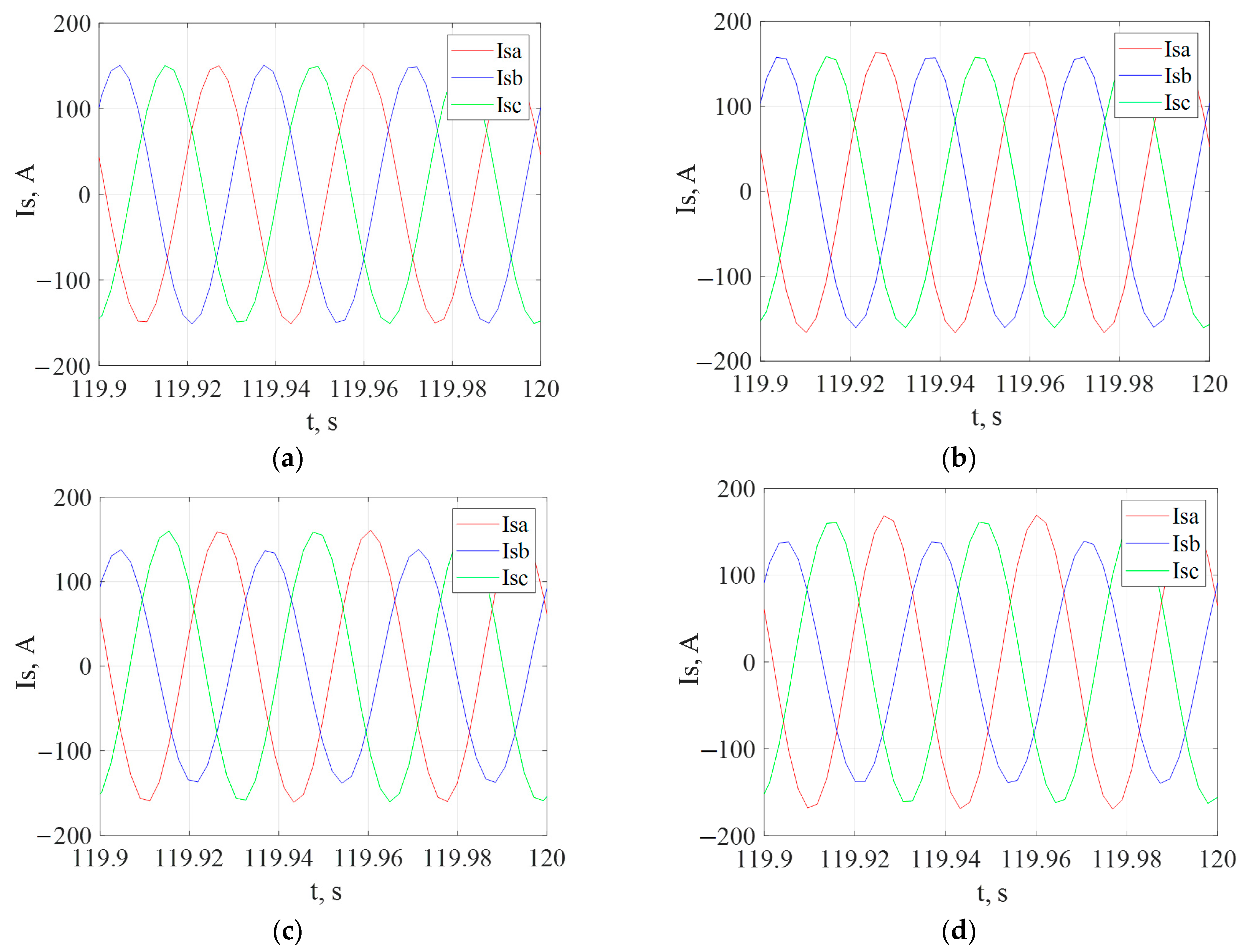
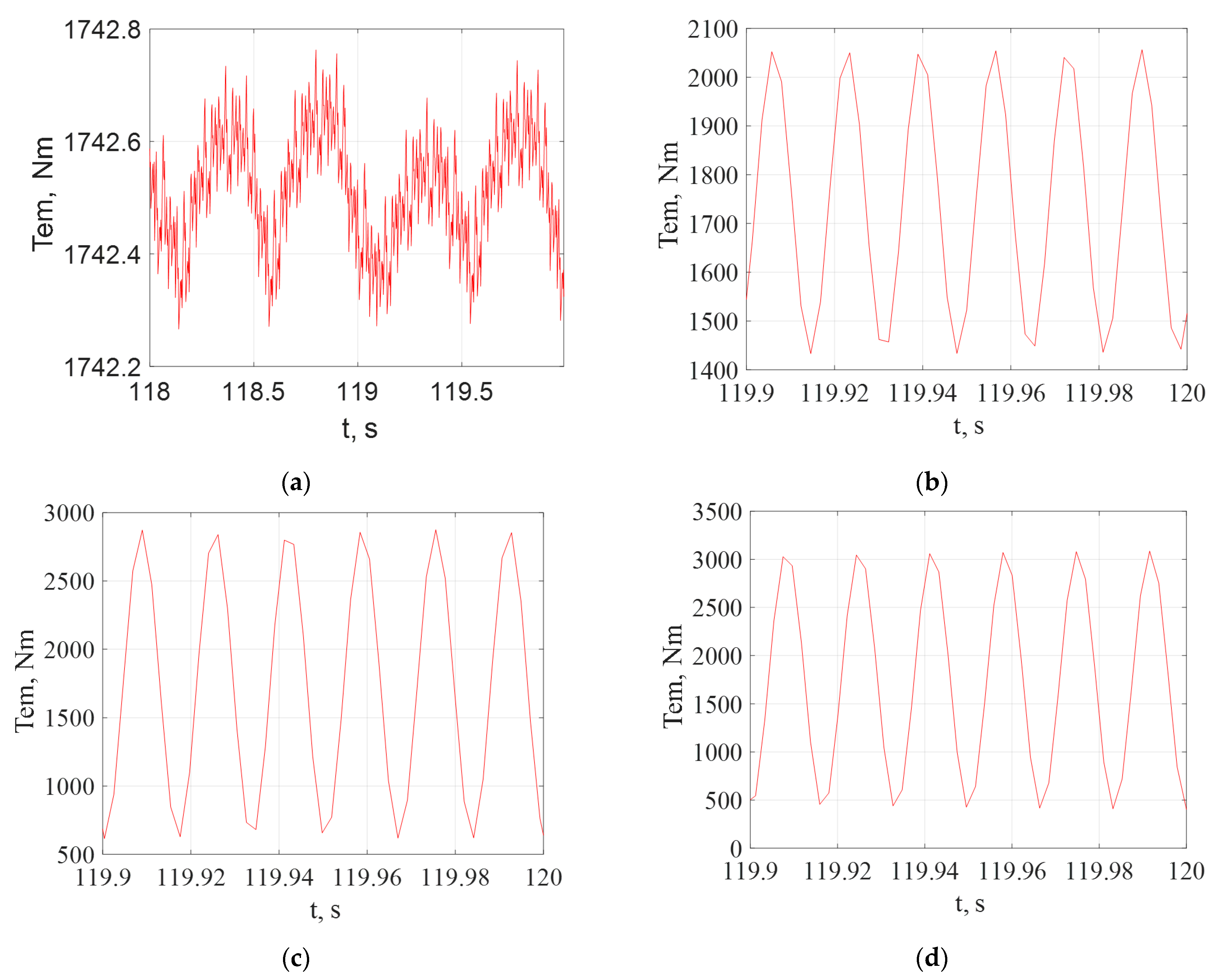
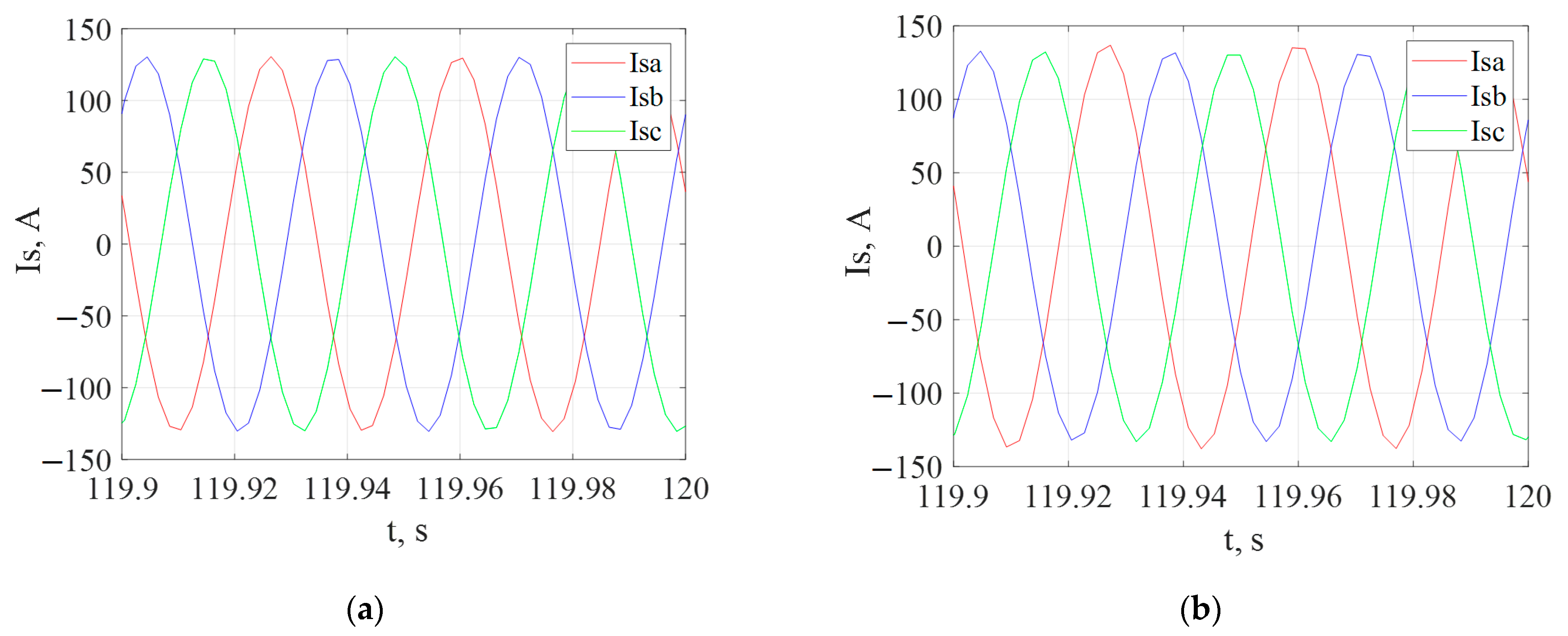
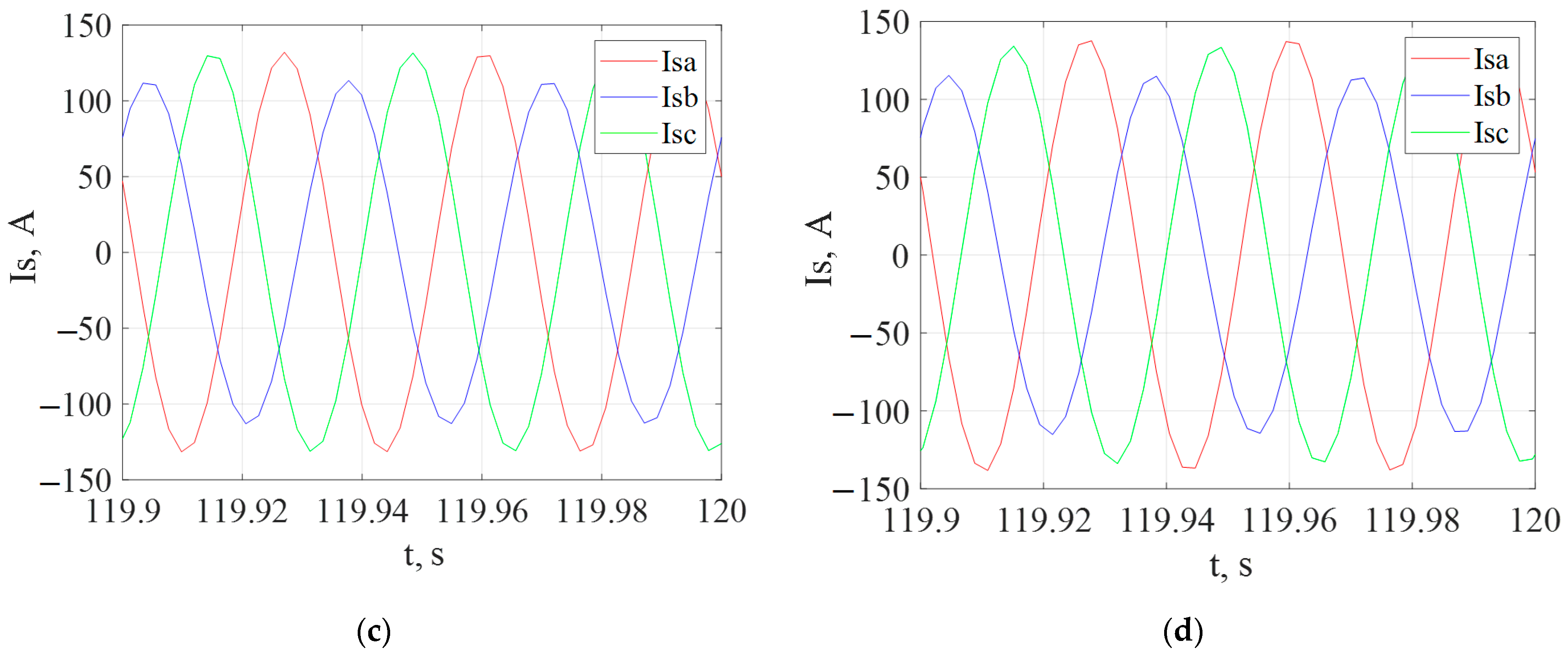
- The asymmetry in the power supply system has a greater effect on the torque ripple and the imbalance of the stator phase currents than the asymmetry of the stator windings. With a deviation of the phase voltage of one of their phases by 2%, the torque ripple coefficient for a scalar control system was 40%, the unbalance coefficient of the stator phase currents was 14%. With a vector control scheme, the torque ripple coefficient was 34.5%, and the unbalance coefficient of the stator phase currents was 17%. With a deviation of the impedance of one of the phases by 10%, similar parameters for scalar control were: torque ripple coefficient—18%, stator phase current imbalance coefficient—4.5%. With vector control: torque ripple factor—15, 5%, unbalance factor of stator phase currents—1.5%.
- -
- With the same damages with a vector control scheme, less ripple of the torque occurs, and with a scalar one, a smaller imbalance of phase currents.
5. Conclusions
- -
- With an asymmetry of the power supply system, the ripple coefficient of the motor torque is 2.3 times greater than with the asymmetry of the stator windings with scalar control and 2.2 times more with vector control; the current imbalance coefficient is 3 times higher with scalar control and 11 times higher with vector control.
- -
- With the same damages with a vector control scheme, less ripple of the torque occurs, and with a scalar one, a smaller imbalance of phase currents.
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mikhailov, E.; Semenov, S.; Dižo, J.; Kravchenko, K. Research of Possibilities of Reducing the Driving Resistance of a Railway Vehicle by Means of the Wheel Construction Improvement. Transp. Res. Procedia 2019, 40, 831–838. [Google Scholar] [CrossRef]
- Tkachenko, V.; Sapronova, S.; Zub, E.; Morneva, M. Closed Power Loops in the Guidance of Vehicles by Railway Track System. In Transport Means—Proceedings of the International Conference, Online Conference, 30 September–2 October 2020; Kaunas University of Technology: Kaunas, Lithuania, 2020; pp. 554–559. Available online: https://transportmeans.ktu.edu/wp-content/uploads/sites/307/2018/02/Transport-means-A4-II-dalis.pdf (accessed on 3 January 2022).
- Hauser, V.; Nozhenko, O.S.; Kravchenko, K.O.; Loulová, M.; Gerlici, J.; Lack, T. Innovative Wheel Tread Design Aimed to Tramcar-Track Interaction Improvement When Passing Curves of a Small Radius. MATEC Web of Conferences. EDP Sci. 2018, 157, 03010. [Google Scholar] [CrossRef]
- Gorbunov, M.; Gerlici, J.; Kara, S.; Nozhenko, O.; Chernyak, G.; Kravchenko, K.; Lack, T. New Principle Schemes of Freight Cars Bogies. Manuf. Technol. 2018, 18, 233–238. [Google Scholar] [CrossRef]
- Gerlici, J.; Gorbunov, M.; Nozhenko, O.; Pistek, V.; Lack, T.; Kravchenko, K. About Creation of Bogie of the Freight Car. Commun.—Sci. Lett. Univ. Zilina 2017, 19, 29–35. Available online: http://komunikacie.uniza.sk/index.php/communications/article/view/208 (accessed on 3 January 2022).
- Hauser, V.; Nozhenko, O.S.; Kravchenko, K.O.; Loulová, M.; Gerlici, J.; Lack, T. Proposal of a Mechanism for Setting Bogie Wheelsets to Radial Position While Riding along Track Curve. Manuf. Technol. 2017, 17, 186–192. [Google Scholar] [CrossRef]
- Mikhailov, E.; Sapronova, S.; Tkachenko, V.; Semenov, S.; Smyrnova, I.; Kholostenko, Y. Improved Solution of Guiding of Railway Vehicle in Curves. In Transport Means—Proceedings of the 23rd International Scientific Conference TRANSPORT MEANS 2019, Palanga, Lithuania, 2–4 October 2019; Printing House “Technologija”: Kaunas, Lithuania, 2019; pp. 916–921. ISSN1 1822-296 X. ISSN2 2351-7034. Available online: https://transportmeans.ktu.edu/wp-content/uploads/sites/307/2018/02/Transport-means-2019-Part-2.pdf (accessed on 3 January 2022).
- Ronanki, D.; Singh, S.A.; Williamson, S.S. Comprehensive Topological Overview of Rolling Stock Architectures and Recent Trends in Electric Railway Traction Systems. IEEE Trans. Transp. Electr. 2017, 3, 724–738. [Google Scholar] [CrossRef]
- Titova, T.S.; Evstaf’ev, A.M.; Nikitin, V.V. The Use of Energy Storages to Increase the Energy Effectiveness of Traction Rolling Stock. Russ. Electr. Eng. 2018, 89, 576–580. [Google Scholar] [CrossRef]
- Huang, X.; Liao, Q.; Li, Q.; Tang, S.; Sun, K. Power Management in Co-Phase Traction Power Supply System with Super Capacitor Energy Storage for Electrified Railways. Railw. Eng. Sci. 2020, 28, 85–96. [Google Scholar] [CrossRef] [Green Version]
- Petrenko, O.; Liubarskiy, B.; Pliugin, V. Determination of Railway Rolling Stock Optimal Movement Modes. Electr. Eng. Electromech. 2017, 6, 27–31. [Google Scholar] [CrossRef] [Green Version]
- Goolak, S.; Tkachenko, V.; Bureika, G.; Vaičiūnas, G. Method of Spectral Analysis of Traction Current of AC Electric Locomotives. Transport 2020, 35, 658–668. [Google Scholar] [CrossRef]
- Sokol, Y.; Zamaruiev, V.; Ivakhno, V.; Styslo, B. Improving the Quality of Electrical Energy in the Railway Power Supply System. In Proceedings of the 2018 IEEE 38th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 24–26 April 2018; IEEE: New York, NY, USA, 2018; pp. 563–566. [Google Scholar] [CrossRef]
- Nezevak, V.; Shatokhin, A. Interaction’s Simulation Modeling of Electric Rolling Stock and Electric Traction System. In Proceedings of the 2019 International Ural Conference on Electrical Power Engineering (UralCon), Chelyabinsk, Russia, 1–3 October 2019; IEEE: New York, NY, USA, 2019; pp. 410–416. [Google Scholar] [CrossRef]
- Goolak, S.; Sapronova, S.; Tkachenko, V.; Riabov, I.; Batrak, Y. Improvement of the Model of Power Losses in the Pulsed Current Traction Motor in an Electric Locomotive. East.-Eur. J. Enterp. Technol. 2020, 6, 38–46. [Google Scholar] [CrossRef]
- Pugachev, A. Efficiency Increasing of Induction Motor Scalar Control Systems. In Proceedings of the 2017 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Chelyabinsk, Russia, 16–19 May 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Costa, C.A.; Nied, A.; Nogueira, F.G.; Turqueti, M.D.A.; Rossa, A.J.; Dezuo, T.J.M.; Junior, W.B. Robust LPV Scalar Control Applied in High Performance Induction Motor Drives. IEEE Trans. Ind. Electr. 2020, 68, 10558–10568. [Google Scholar] [CrossRef]
- Kumar, Y.S.; Poddar, G. Medium-Voltage Vector Control Induction Motor Drive at Zero Frequency Using Modular Multilevel Converter. IEEE Trans. Ind. Electr. 2017, 65, 125–132. [Google Scholar] [CrossRef]
- Hassan, M.M.; Shaikh, M.S.; Jadoon, H.U.K.; Atif, M.R.; Sardar, M.U. Dynamic Modeling and Vector Control of AC Induction Traction Motor in China Railway. Sukkur IBA J. Emerg. Technol. 2020, 3, 115–125. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Y.C.; Ge, X. Sliding-Mode Observer-Based Speed-Sensorless Vector Control of Linear Induction Motor with a Parallel Secondary Resistance Online Identification. IET Electr. Power Appl. 2018, 12, 1215–1224. [Google Scholar] [CrossRef]
- Lee, J.K.; Kim, J.W.; Park, B.G. Fast Anti-Slip Traction Control for Electric Vehicles Based on Direct Torque Control with Load Torque Observer of Traction Motor. In Proceedings of the 2021 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–25 June 2021; IEEE: New York, NY, USA, 2021; pp. 321–326. [Google Scholar] [CrossRef]
- Aissa, B.; Hamza, T.; Yacine, G.; Mohamed, N. Impact of Sensorless Neural Direct Torque Control in a Fuel Cell Traction System. Int. J. Electr. Comput. Eng. (IJECE) 2021, 11, 2725–2732. [Google Scholar] [CrossRef]
- Karlovsky, P.; Lettl, J. Induction Motor Drive Direct Torque Control and Predictive Torque Control Comparison Based on Switching Pattern Analysis. Energies 2018, 11, 1793. [Google Scholar] [CrossRef] [Green Version]
- Busher, V.; Chornyi, O.; Glazeva, O.; Kuznetsov, V.G.; Tytiuk, V.; Tryputen, M. Optimal Control Method of High-Voltage Frequency Converters with Damaged Cells. IOP Conf. Ser. Mater. Sci. Eng. 2020, 985, 012021. [Google Scholar] [CrossRef]
- Tuychieva, M. Control of Electric Locomotives with Asynchronous Electric Motors under Asymmetric Operating Conditions in Uzbekistan. IOP Conf. Ser. Earth Environ. Sci. 2020, 614, 012060. [Google Scholar] [CrossRef]
- Dong, H.; Chen, F.; Wang, Z.; Jia, L.; Qin, Y.; Man, J. An Adaptive Multisensor Fault Diagnosis Method for High-Speed Train Traction Converters. IEEE Trans. Power Electr. 2020, 36, 6288–6302. [Google Scholar] [CrossRef]
- Zagirnyak, M.; Kalinov, A.; Melnykov, V. Variable-Frequency Electric Drive with a Function of Compensation for Induction Motor Asymmetry. In Proceedings of the 2017 IEEE First Ukraine Conference on Electrical and Computer Engineering (UKRCON), Kyiv, Ukraine, 29 May–2 June 2017; IEEE: New York, NY, USA, 2017; pp. 338–344. [Google Scholar] [CrossRef]
- Zagirnyak, M.; Kalinov, A.; Melnykov, V. Decrease of the Thermal Overloads of a Variable-Frequency Electric Drive at Damages in the Electric Circuit of an Induction Motor Stator. Prz. Elektrotech. 2019, 95, 43–46. [Google Scholar] [CrossRef]
- Melnykov, V. The Correction of the Operation Modes for Frequency-Controlled Induction Motor with Scalar Control under Stator Windings Damage Appearance. In Proceedings of the 2021 IEEE International Conference on Modern Electrical and Energy Systems (MEES), Kremenchuk, Ukraine, 21–24 September 2021; IEEE: New York, NY, USA, 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Rules of Traction Calculations for Train Work on Electric Locomotives ChS7, ChS8, DE1, DS3, 2EL5, 2ES5K, Diesel Locomotives TEP150, TEM103, Diesel Trains DEL-02, Electric Trains EPL2t, EPL9t.2010 (Ukrainian), Ukrzaliznytsia. 2010. Available online: http://scbist.com/scb/uploaded/1_1599018086.pdf. (accessed on 3 January 2022).
- Goolak, S.; Liubarskyi, B.; Sapronova, S.; Tkachenko, V.; Riabov, I.; Glebova, M. Improving a Model of the Induction Traction Motor Operation Involving Non-Symmetric Stator Windings. East.-Eur. J. Enterp. Technol. 2021, 4, 45–58. [Google Scholar] [CrossRef]
- Goolak, S.; Gerlici, J.; Tkachenko, V.; Sapronova, S.; Lack, T.; Kravchenko, K. Determination of Parameters of Asynchronous Electric Machines with Asymmetrical Windings of Electric Locomotives. Commun.—Sci. Lett. Univ. Zilina 2019, 21, 24–31. [Google Scholar] [CrossRef]
- Spiryagin, M.; Vollebregt, E.; Hayman, M.; Persson, I.; Wu, Q.; Bosomworth, C.; Cole, C. Development and Computational Performance Improvement of the Wheel-Rail Coupling for Heavy Haul Locomotive Traction Studies. Veh. Syst. Dyn. 2020, 1–28. [Google Scholar] [CrossRef]
- Gouichiche, A.; Safa, A.; Chibani, A.; Tadjine, M. Global Fault-Tolerant Control Approach for Vector Control of an Induction Motor. Int. Trans. Electr. Energy Syst. 2020, 30, 12440. [Google Scholar] [CrossRef]
- Che, H.; Wu, B.; Yang, J.; Tian, Y. Speed Sensorless Sliding Mode Control of Induction Motor Based on Genetic Algorithm Optimization. Meas. Control 2020, 53, 192–204. [Google Scholar] [CrossRef] [Green Version]
- Goolak, S.; Gerlici, J.; Gubarevych, O.; Lack, T.; Pustovetov, M. Imitation Modeling of an Inter-Turn Short Circuit of an Asynchronous Motor Stator Winding for Diagnostics of Auxiliary Electric Drives of Transport Infrastructure. Commun.—Sci. Lett. Univ. Zilina 2021, 23, C65–C74. [Google Scholar] [CrossRef]
- Petko, V.; Petrov, A.; Rakhimzhanova, I.; Shakhov, V.; Ushakov, Y.; Fomin, M. Permissible Voltage Asymmetry for Asynchronous Motor Operating in Non-Nominal Operating Conditions. In Proceedings 19th International Scientific Conference “Engineering for Rural Development”; Latvia University of Life Sciences and Technologies: Jelgava, Latvia, 2020; Volume 19, pp. 897–905. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicators | Value |
|---|---|
| Number of locomotive axles N, pcs. | 4 |
| Starting traction FT, N | 27,523 |
| Restrictions | By current |
| Traction motor type | AD914U1 |
| Electric locomotive weight m, kg | 90,000 |
| Wheel radius R, m | 0.6 |
| Gear ratio μ, p.u | 4.105 |
| Gearbox efficiency ηr,% | 96 |
| Indicators | Value |
|---|---|
| Power P, kW | 1200 |
| Current value of line voltage Unom, V | 1870 |
| Effective value Inom, A | 450 |
| Rated frequency of the supply voltage f, Hz | 55.8 |
| Number of phases n, pcs. | 3 |
| Number of pole pairs pp | 3 |
| Nominal rotation frequency nr, rpm | 1110 |
| Efficiency η, % | 95.5 |
| Power factor cosφ, per unit | 0.88 |
| Active resistance of the stator winding rs, Ω | 0.0226 |
| The active resistance of the rotor winding reduced to the stator winding r’r, Ohm | 0.0261 |
| Stator winding leakage inductance Lσs, Hn | 0.00065 |
| Reduced to the stator winding leakage inductance of the rotor winding, L’σr, Hn | 0.00045 |
| Total inductance of the magnetizing circuit Lμ | 0.0194336 |
| Motor moment of inertia J, kg·m2 | 73 |
| Base Values | ||
|---|---|---|
| Base value for voltages, V | Ub = √2·Unom | 1527 |
| Basic value for currents, A | Ιb = √2·Ιnom | 450 |
| Base value for corner frequencies, 1/s | Ωb = 2·π·fnom | 349.345 |
| Base value for electrical angles, rad | θb = 2·π | 6.283 |
| Basic value for resistances, Ohm | Ib = Ub/Inom | 3.393 |
| Base value for flux linkages, Wb | ψb = Ub/Ωb | 4.371 |
| Base value for inductances, H | Lb = ψb/Inom | 0.009713 |
| Base value for powers, W | Pb = 2·Ub·Inom/3 | 1,030,725 |
| Basic value for mechanical angular velocities, 1/s | Ωbmech = Ωb/ppole | 116.448 |
| Basic value for moments, N⋅m | Mb = Pb/Ωbmech | 8851 |
| Base value for time | Tb = 1/Ωb | 0.002862 |
| Basic value for moments of inertia, kg⋅m2 | Tb = Mb·ppole/(Ωb)2 | 0.218 |
| Additional parameters of AM in p.u. | ||
| Magnetizing inductance | L*m = Lm/Lb | 1.334 |
| Magnetizing inductance | L*s = Ls/Lb | 1.401 |
| Rotor phase total inductance | L*r = Lr/Lb | 1.38 |
| R*s = Rs/Rb | 0.00666 | |
| R’*r = R’r/Rb | 0.07692 | |
| Rotor moment of inertia | J*en = Jen/Jb | 335.507 |
| Additional dimensionless parameters of AD | ||
| Total dissipation coefficient | σ = 1 − (L*m)2/(L*s·L*r) | 0.08 |
| Dimensionless stator time constant | χ*s = L*s/R*s | 210.314 |
| Dimensionless rotor time constant | χ*r = L*r/R*r | 179.434 |
| Controller parameters | ||
| Current loop tuning factor X | aIx | 2 |
| Current loop tuning factor Y | aIy | 2 |
| Flow loop adjustment factor | aIμ | 2 |
| Speed loop tuning factor | aω | 2 |
| Uncompensated time constant | χ*μ = 10/(6·τPWM) | 0.361 |
| Proportional coefficient of the current regulator X in the absence of an EMF compensation unit | KpIx = (R*s·σ·χ*s)/(aIx·χ*μ) | 0.155 |
| Integral coefficient of the current regulator X in the absence of an EMF compensation unit | KiIx = (R*s + (χ*μ)2/(χ*r·L*r))/(aIx·χ*μ) | 0.019 |
| Proportional coefficient of the current regulator Y | KpIy = (R*s·σ·χ*s)/(aIy·χ*μ) | 0.155 |
| Integral coefficient of the current regulator Y | KiIy = R*s/(aIx·χ*μ) | 0.00922 |
| Proportional coefficient of the rotor magnetizing current regulator | KpIμ = χ*r/(aIx·aIμ·χ*μ) | 124.226 |
| Integral coefficient of the rotor magnetizing current regulator | KiIμ = 1/(aIx·aIμ·χ*μ) | 0.692 |
| Proportional coefficient of the speed controller | Kpω = J*en·kj/(aIy·aω·χ*μ) | 6736 |
| Integral coefficient of the speed controller | Kiω = 0 | 0 |
| Parameter | Parameter Value | |||
|---|---|---|---|---|
| Experiment 1 | Experiment 2 | Experiment 3 | Experiment 4 | |
| Maximum torque, N·m | 1745.5 | 2047 | 2857 | 3060 |
| Minimum torque value, N·m | 1745.25 | 1433 | 618.4 | 425.9 |
| Average torque, N·m | 1745.375 | 1740 | 1403.3 | 1357.05 |
| Ripple frequency, Hz | 60 | 60 | 60 | 60 |
| Stator phase current A, A | 151.1 | 163.6 | 159.1 | 168.4 |
| Stator phase current B, A | 151.1 | 158.4 | 138.2 | 139.2 |
| Stator phase current C, A | 151.1 | 156.5 | 158.9 | 161.2 |
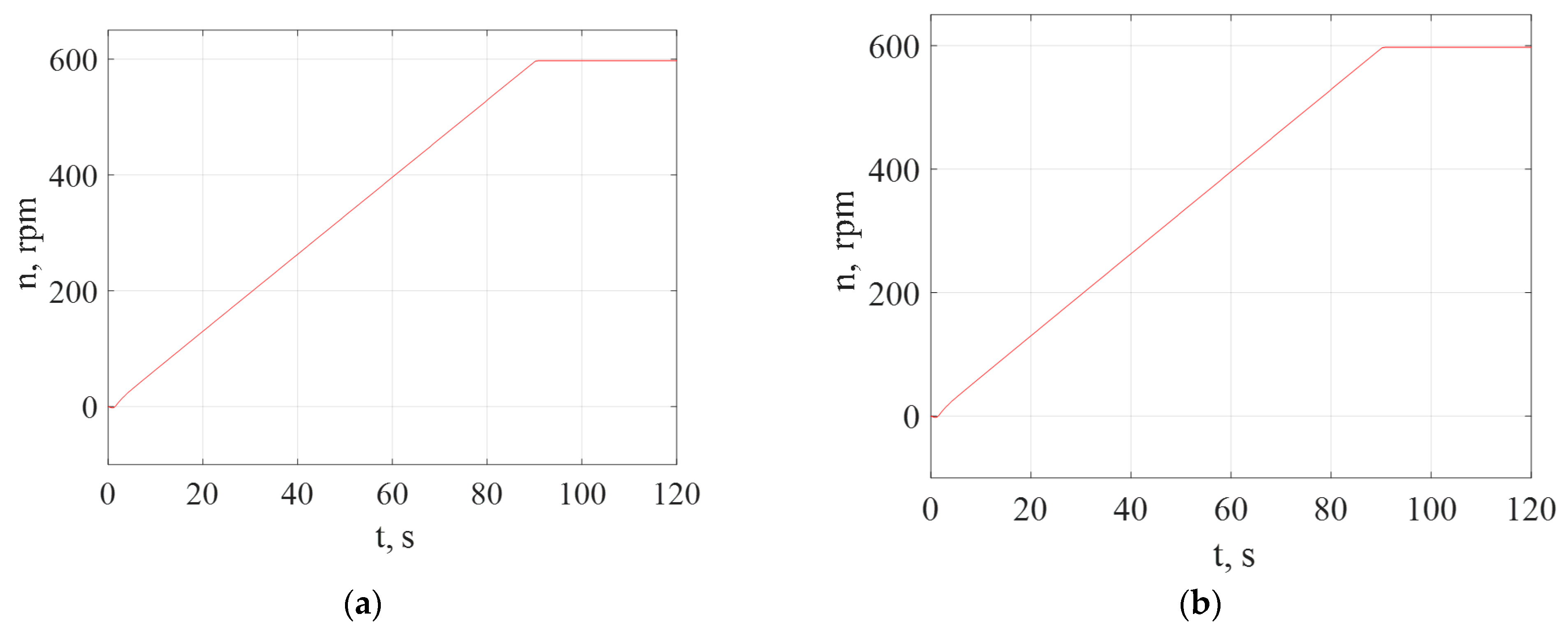
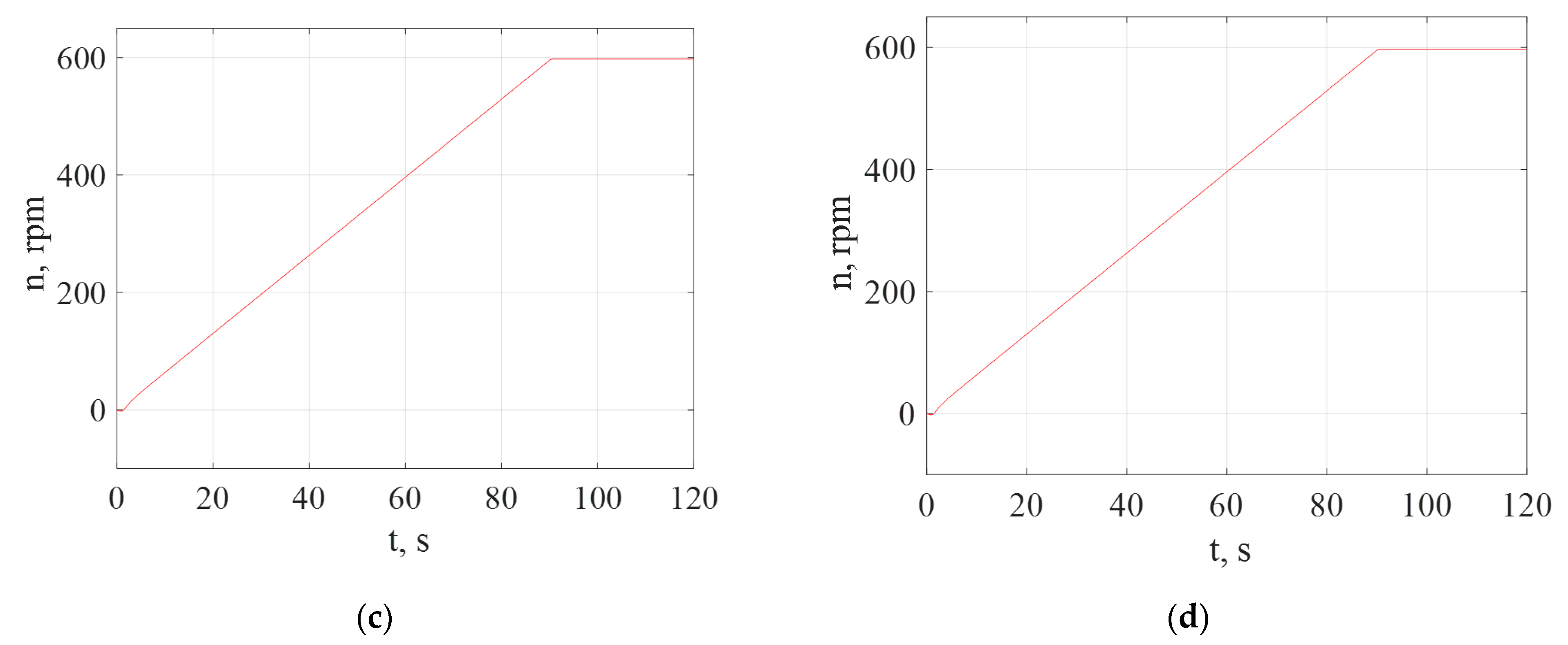
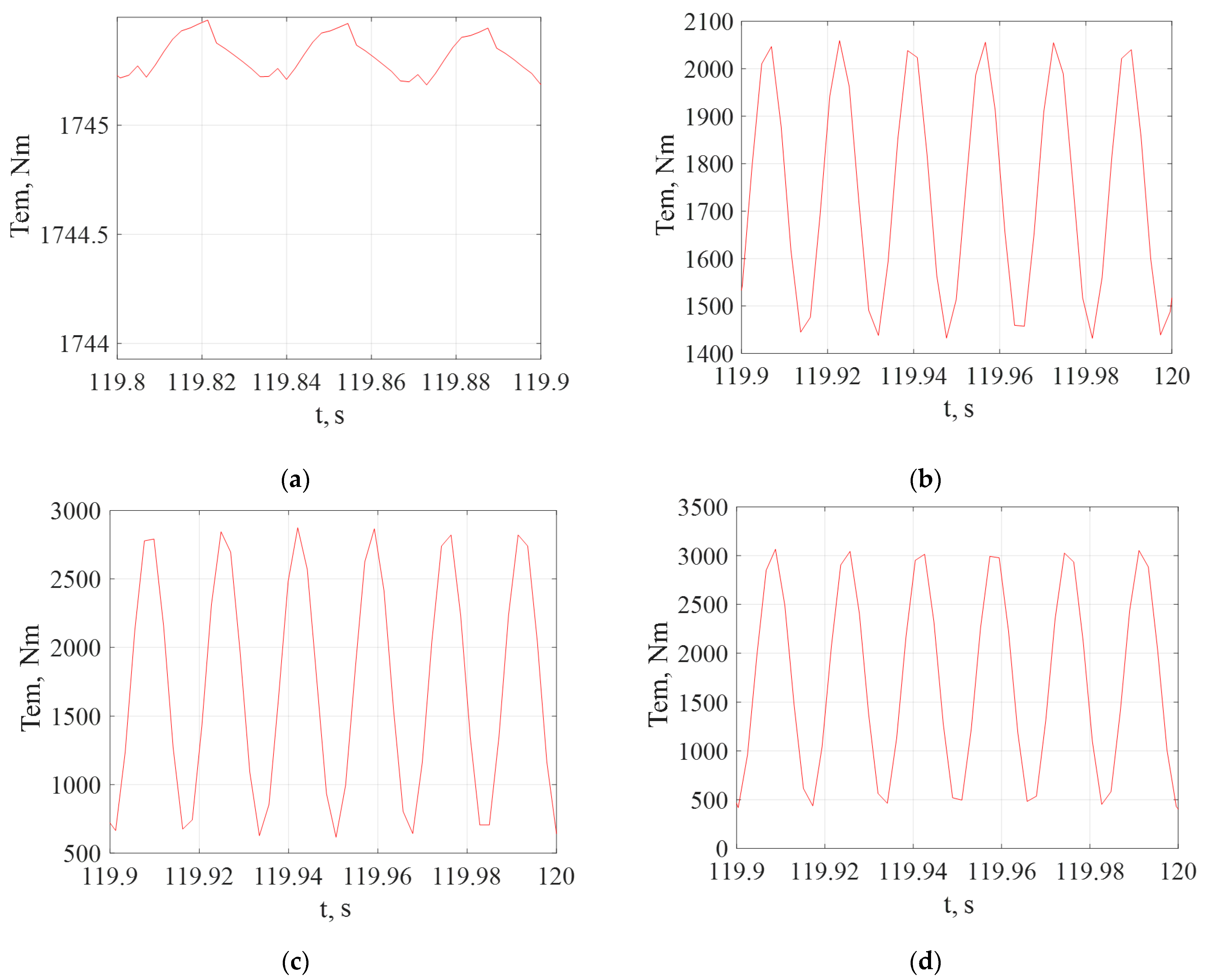
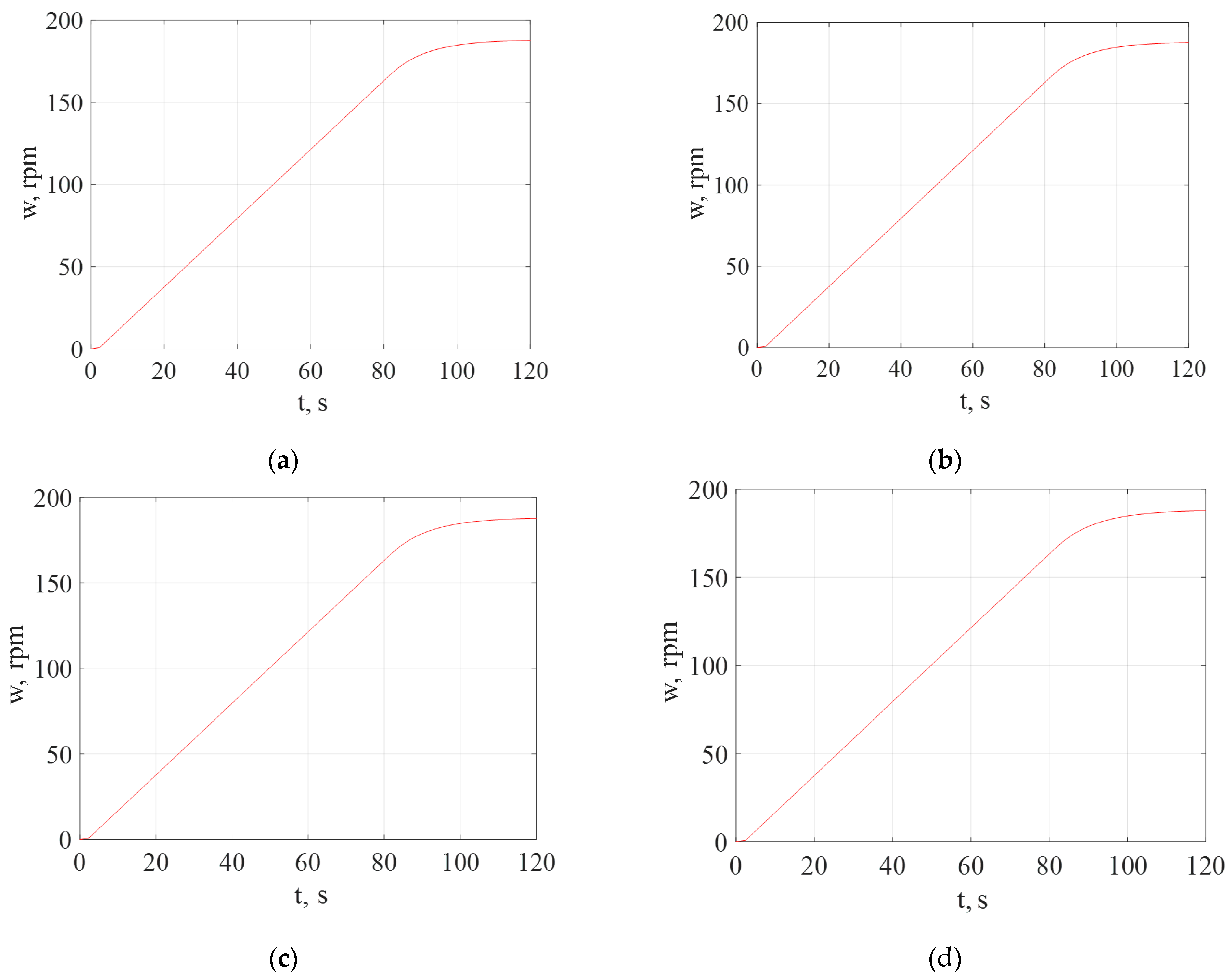
| Engine speed, rpm | 600 | 600 | 600 | 600 |
| Transient end time, s | 90 | 90 | 90 | 90 |
| Torque ripple factor, kpT, % | 0.002 | 17.64 | 40 | 48.5 |
| Unbalance factor of stator phase currents, knbI | 0 | 4.4 | 13.7 | 18.7 |
| Parameter | Parameter Value | |||
|---|---|---|---|---|
| Experiment 5 | Experiment 6 | Experiment 7 | Experiment 8 | |
| Maximum torque, N·m | 1744.2 | 2009 | 2942 | 3090 |
| Minimum torque value, N·m | 1743.5 | 1472 | 541.7 | 417.7 |
| Average torque, N·m | 1743.85 | 1740.5 | 1741.85 | 1753.85 |
| Ripple frequency, Hz | 60 | 60 | 60 | 60 |
| Stator phase current A, A | 133 | 138.6 | 141.8 | 146.8 |
| Stator phase current B, A | 133 | 133.1 | 118.9 | 116.9 |
| Stator phase current C, A | 133 | 132.3 | 140.9 | 140.6 |
| Engine speed, rpm | 600 | 597.8 | 597.6 | 597.3 |
| Transient end time, s | 90 | 90.3 | 90.51 | 90.65 |
| Torque ripple factor, kpT, % | 2 | 15.4 | 34.5 | 38.0 |
| Unbalance factor of stator phase currents, knbI | 0 | 1.6 | 17.1 | 22.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goolak, S.; Tkachenko, V.; Šťastniak, P.; Sapronova, S.; Liubarskyi, B. Analysis of Control Methods for the Traction Drive of an Alternating Current Electric Locomotive. Symmetry 2022, 14, 150. https://doi.org/10.3390/sym14010150
Goolak S, Tkachenko V, Šťastniak P, Sapronova S, Liubarskyi B. Analysis of Control Methods for the Traction Drive of an Alternating Current Electric Locomotive. Symmetry. 2022; 14(1):150. https://doi.org/10.3390/sym14010150
Chicago/Turabian StyleGoolak, Sergey, Viktor Tkachenko, Pavol Šťastniak, Svitlana Sapronova, and Borys Liubarskyi. 2022. "Analysis of Control Methods for the Traction Drive of an Alternating Current Electric Locomotive" Symmetry 14, no. 1: 150. https://doi.org/10.3390/sym14010150
APA StyleGoolak, S., Tkachenko, V., Šťastniak, P., Sapronova, S., & Liubarskyi, B. (2022). Analysis of Control Methods for the Traction Drive of an Alternating Current Electric Locomotive. Symmetry, 14(1), 150. https://doi.org/10.3390/sym14010150