1. Introduction
Many real-world problems are mathematically formulated in terms of differential equations (DEs), integro-differential equations (IDEs) or partial differential equations (PDEs). Symmetry plays an important role in the study of many types of these equations [
1,
2,
3]. Stochastic differential equations (SDEs) are often adopted to model the time evolution of systems in the areas of biology, physics, economics, and engineering, among others. SDEs have an important role in explaining some symmetry phenomena, namely symmetry breaking in molecular vibration [
4]. Due to physical constraints, it is often necessary to introduce time delays into the equations in order to take into account the fact that systems’ response to inputs or perturbations is not instantaneous, leading to the so-called stochastic delayed differential equations (SDDEs). Indeed, energy transfer or signal transmission might be the origin of delay terms. Recurrently, the calculation of the reaction of time-delay systems turns out to be incredibly demanding. However, regardless of the challenges, addressing such issues ends up being unavoidable.
Solving SDDEs is an open issue, and different numerical methods have been proposed. Among them, orthogonal functions can reduce the SDDEs to a linear system of algebraic equations, whose solution describes approximately the behavior of the original system.
In the follow-up, we consider:
where
,
,
,
, and the 1-D Wiener process
, for
, are stochastic processes defined on the same probability space
, with a filtration
. These satisfy the usual conditions, namely: (i) right-continuous filtration
; (ii) each
contains all
P-null sets in
F; and (iii)
is an unknown function, and
is a stochastic integral that is interpreted in the Itô sense [
5].
We are interested in the response to the initial function
or the parameters contained in the SDDEs. In fact, extra data are required to deal with a system of delayed differential equations (DDEs). Since the derivative of Equation (
1) depends upon the solution at former time
, it is essential to give an initial history function to determine the value of the solution before time
. In many usual models, the history is a constant vector. However, non-constant history functions are experienced regularly. The initial time is a jump derivative discontinuity in most problems. Moreover, any solution or derivative discontinuity in the history function at preceding points to the initial time should be dealt with suitably since such discontinuities can spread to after-times.
Numerical analysis of SDDEs based on the Euler–Maruyama scheme was suggested by Buckwar [
6]. Triangular functions (TFs) were proposed for the analysis of dynamic systems by Deb et al. [
7]. Numerical and computational methods for solving SDEs based on TF and block pulse function (BPF) methods were presented by Khodabin et al. [
8]. Operational matrices of BPFs for Taylor series and Bernstein polynomials were computed by Marzban et al. [
9] and by Behroozifar et al. [
10].
In this paper, we will be keen on obtaining SDDEs approximations via the TFs method. The new approach leads to
convergence rate, which is better than alternative methods [
11]. The rest of the paper is organized as follows. In
Section 2, the basics of TFs and operational delayed matrices are introduced. In
Section 3, the new method is presented. In
Section 4, two numerical examples are studied. In
Section 5, the main conclusion remarks are given.
2. Basic Concepts of Triangular Functions
The TFs originate from a simple dissection of BPFs, where
is the
i-th BPF such that:
where
with
is considered herein in the interval
. Therefore, some basic properties, such as orthogonality, finiteness, disjointedness and orthonormality are shared by both.
Two
m-set TF vectors are defined in
as
,
and the 1-D TF vector is:
where
denotes transposition for
. From the above representation, it follows that:
such that
is a
diagonal matrix, and
is a 2
m-vector with elements equal to the diagonal entries of matrix
B. Moreover,
There are some details that make the TF-based methods more efficient than others. Indeed, determining the coefficient vectors of
j0(ζ) in the TF method needs only samples instead of the usual integration and scaling. Another option is a TF piece-wise linear solution, which in most cases leads to a smaller error than the staircase solution of the BPF piece-wise constant. A square integrable function
j0(ζ) over [0, Z) can be broadened into an
m-set TF series as:
where
and
for
, and
are coefficient vectors. The operational matrix for integration of TFs, for
, is derived as upper triangular matrices:
where
and
with
where
A function of two variables
can be expanded with respect to TFs as
where
and
are
and
triangular vectors, and
K is a
coefficient matrix of TFs. For simplicity, we put
. Therefore,
K can be written as:
where
can be computed by sampling
at points
and
such that
for
. Therefore, the following approximations can be obtained:
and
As noticed in [
12],
where
is the coefficient vector defined as:
The delay function
in (3) is the transfer of
defined in (1) over the time axis by
. The general definition is given by:
where
is defined as the Kronecker delta:
where
is the
l-D identity matrix, and ⊗ denotes the Kronecker product [
13], while
Q is the delay operational matrix of the TF domain. We can derive the delay matrix as follows:
3. Problem Statement
Many systems are impacted by positive and negative feedback. Such mechanisms push the system to a new state of equilibrium or back to its primary state [
14].
Consider a simple delayed feedback by where is a real value and . The cases and correspond to negative and positive feedback, respectively.
When
, we recover a simple ODE. We prescribe
for
as initial data for the upper DE. If such an ODE involves a Gaussian white noise process
, then there will be two states, with additive noise
and multiplicative noise
, in which
b is the noise intensity. For further details, please see [
15].
3.1. Solving SDDEs Based on Triangular Function Operational Matrices with Additive Noise
Below, we consider a linear stochastic Volterra integral equation with single time delay and intend to obtain the
coefficient based upon a TF in the interval
:
where
is a constant specified vector,
and
are known matrices, and
is an arbitrary, initial-history-known function. We approximate the
and
functions by TFs as mentioned below from (6)–(9):
where the vectors
and matrices
are TF coefficients of
and
, respectively. Replacing the above approximations into (5), we arrive at:
where
where
is defined as the Kronecker delta (p. 5), and
Using previous relations:
where
is a 2
m × 2
m diagonal matrix. Notice that
and
Then,
in which
are 2
m × 2
m matrices, and
where
B is a 2
m-D vector with components equal to the diagonal entries of the matrix
,
B can be written as
B = Π ·
J and
. Finally, we arrive at:
By multiplying both sides in
T(ζ) and replacing ≃ with =, we have:
which we denote by
J00 =
J0 +
K1 ·
I1 +
K2 ·
I2,
R =
I − Π. The solution
J is obtained by solving the algebraic equation:
3.2. Solving SDDEs Based on Triangular Function Operational Matrices with Multiplicative Noise
In the following linear stochastic Volterra integral equations (SVIEs) with single time delay, our purpose is to obtain the TF coefficients of
j(ζ) in the interval
:
Substituting function approximations (6)–(9) into (11), we arrive at:
and
Therefore,
where
,
and both integrals are as considered in the previous section. Then,
Thus,
are
matrices, and
in which
Lastly, by multiplying both sides in
, we arrive at:
and replacing ≃ with =, we have
Equations (10) and (12) are linear systems of equations with lower triangular coefficient matrices that give the approximate triangular coefficients of the unknown stochastic processes .
This fulfills the assertions.
5. Illustrative Examples
Examples are used to demonstrate the theoretical outcomes stated in
Section 3 and
Section 4. The related computations are performed in
Let us consider the assumptions:
h: where in .
: The number of interval division. node points for .
: Delay parameter with nonnegative integer ().
n: Number of iterations.
p: Dividing of interval in equal units. z is a coefficient of .
: Standard deviation.
: TF coefficient of the analytic solution.
: TF coefficient of the approximated method.
e: Absolute error computed by
: Mean of error.
: Standard deviation of error.
: Upper bound.
: Lower bound.
Time delayed equations are mostly solved analytically in a step-wise procedure, called method of steps, with initial condition given [
11].
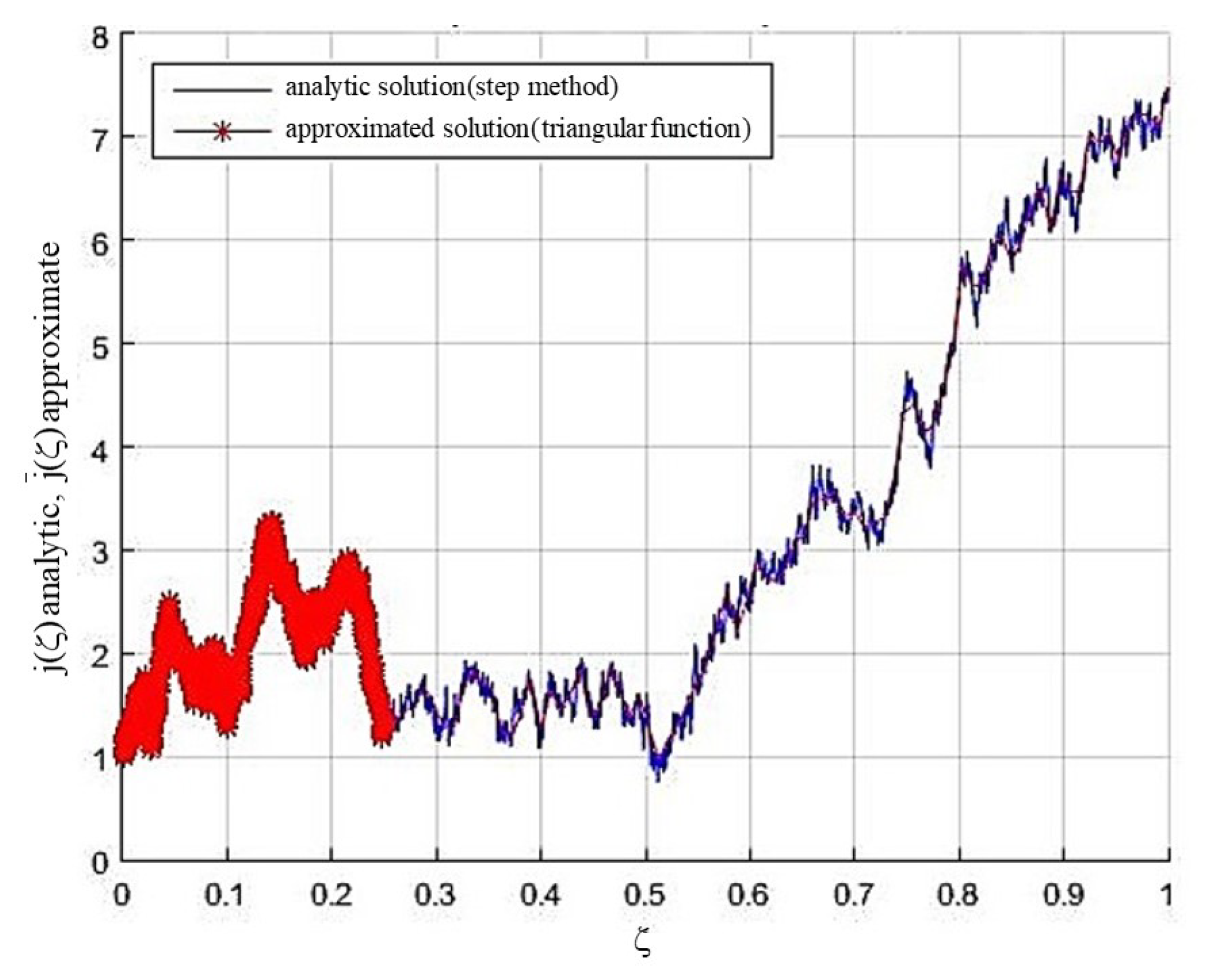
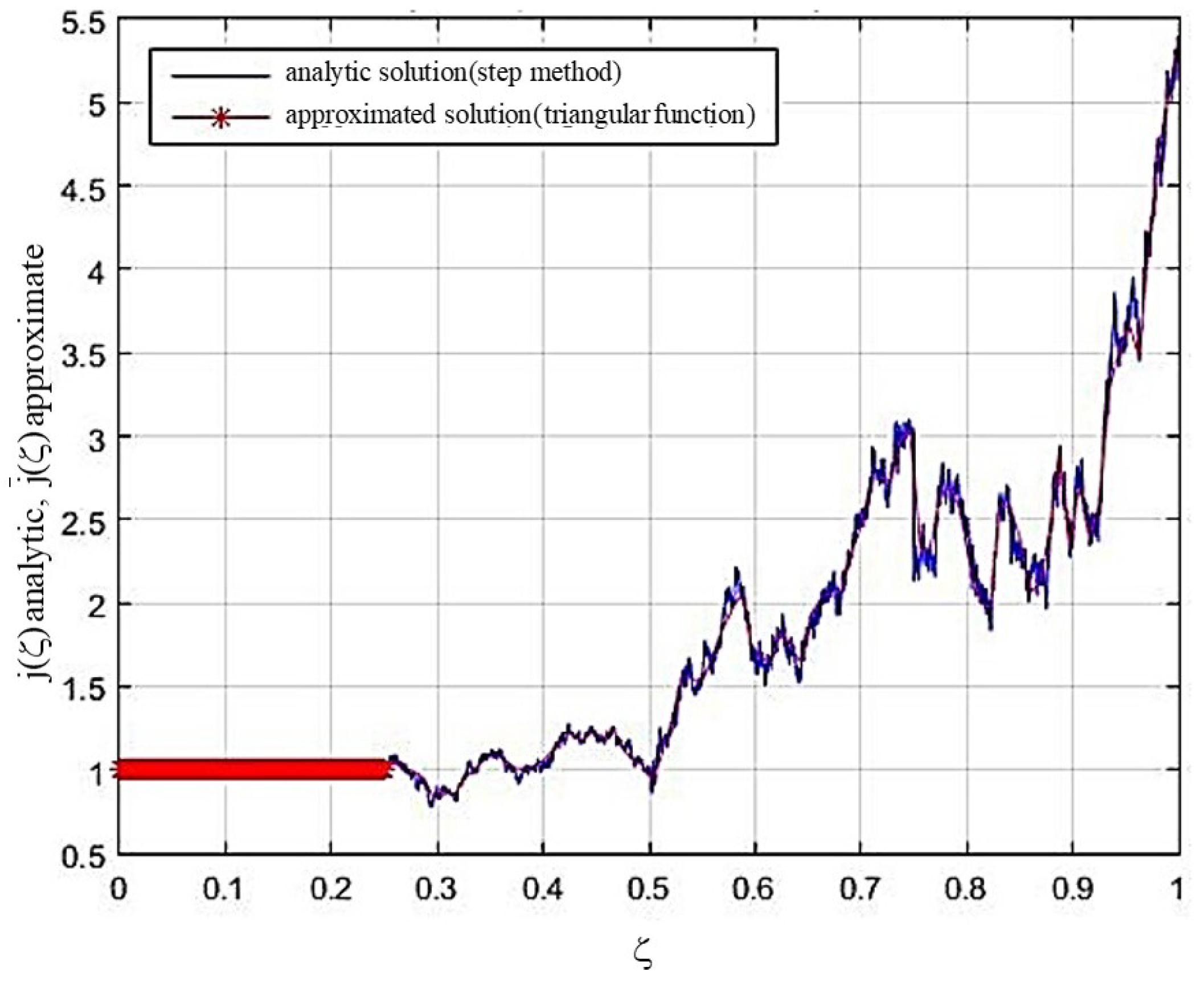
Example 1. Consider a linear stochastic Volterra integral equation with additive noise input and constant time delay:where is an unknown stochastic process on the probability space , and is a Wiener process: Example 2. Assume a linear stochastic Volterra integral equation with multiplicative noise input and time-varying delay as follows:where is an unknown stochastic process on the probability space , and is a Wiener process: The numerical results of the mean and standard deviation with 95% confidence intervals for some different values of
in the points
are shown in
Table 1 and
Table 2.
Figure 1 and
Figure 2 express a trajectory of the approximated solution calculated by the proposed method, along with a trajectory of the analytic solution. It should be noted that due to the high accuracy of the method, in both graphs, the approximated and numerical solutions practically coincide.>








{kind=link}
{kind=link}