
About Stability of Nonlinear Stochastic Differential Equations with State-Dependent Delay


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Equilibria
1.2. Auxiliary Statements
2. Stochastic Perturbations, Centering and Linearization
2.1. Stochastic Perturbations
2.2. Centering
2.3. Linearization
3. Stability
3.1. Some Necessary Definitions
- -
- mean square stable if for each there exists a such that , , provided that ;
- -
- asymptotically mean square stable if it is mean square stable and for each initial value the solution of Equation (17) satisfies the condition .
3.2. Delay-Independent Condition
3.3. Delay-Dependent Condition
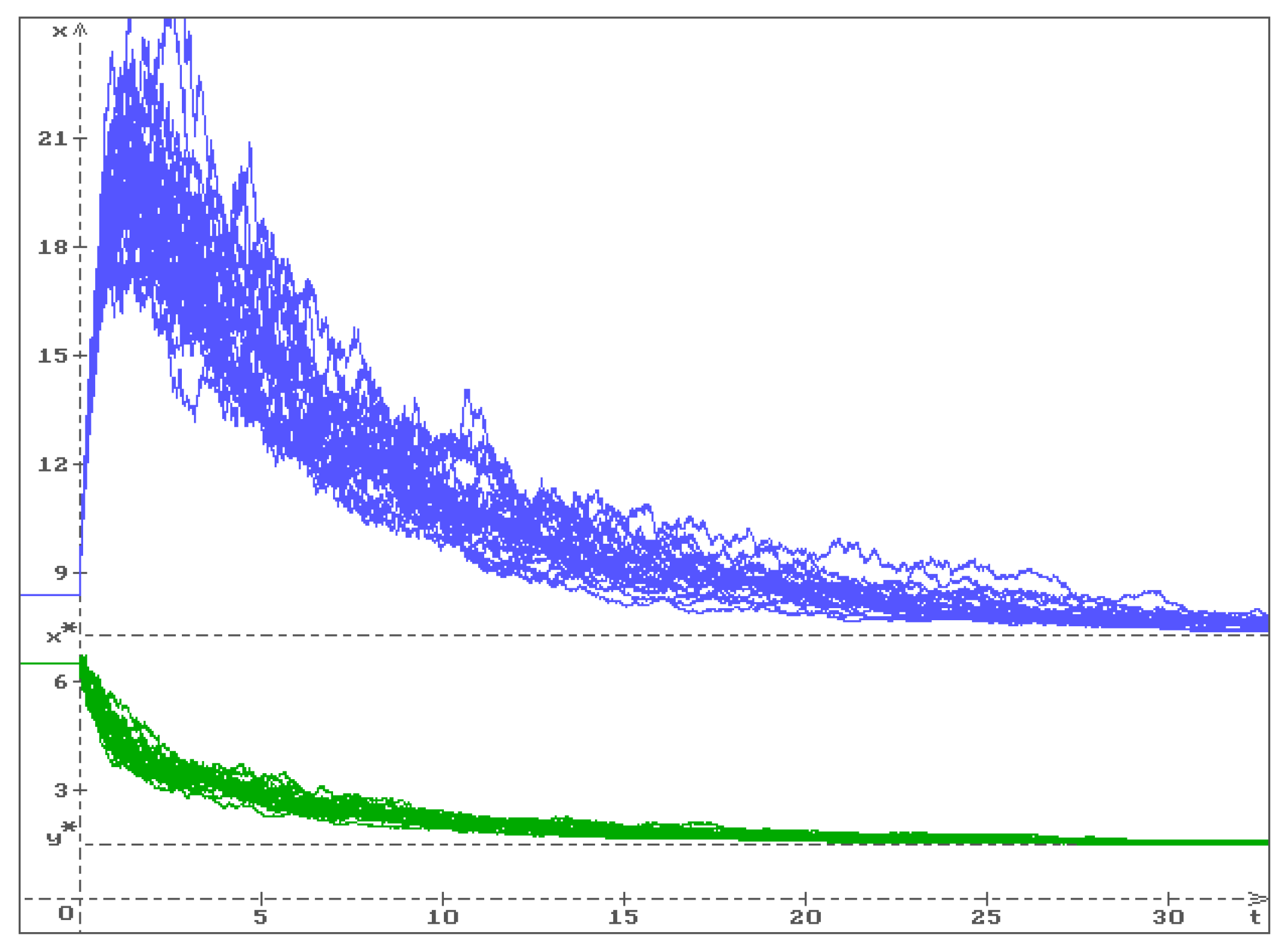
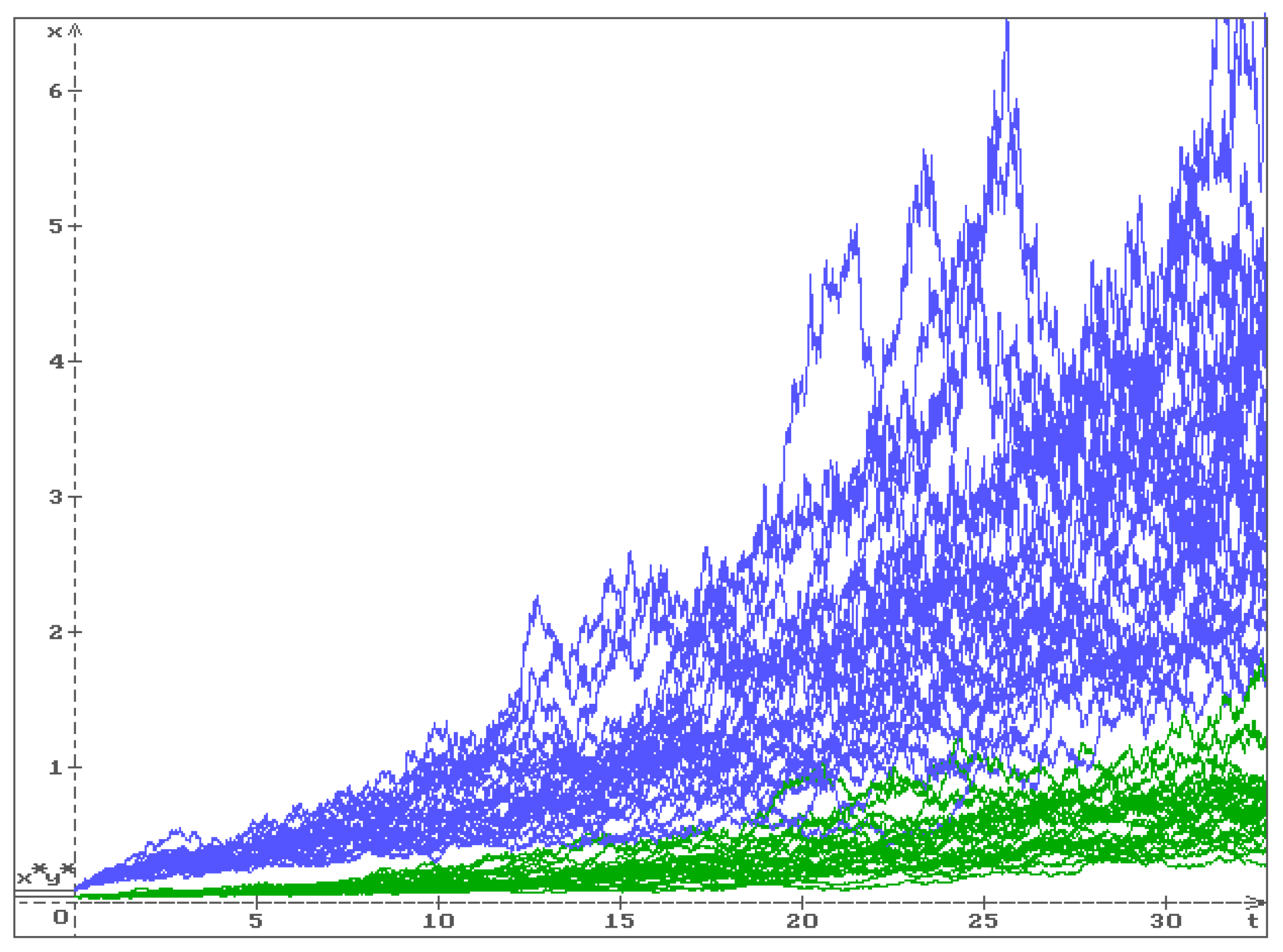
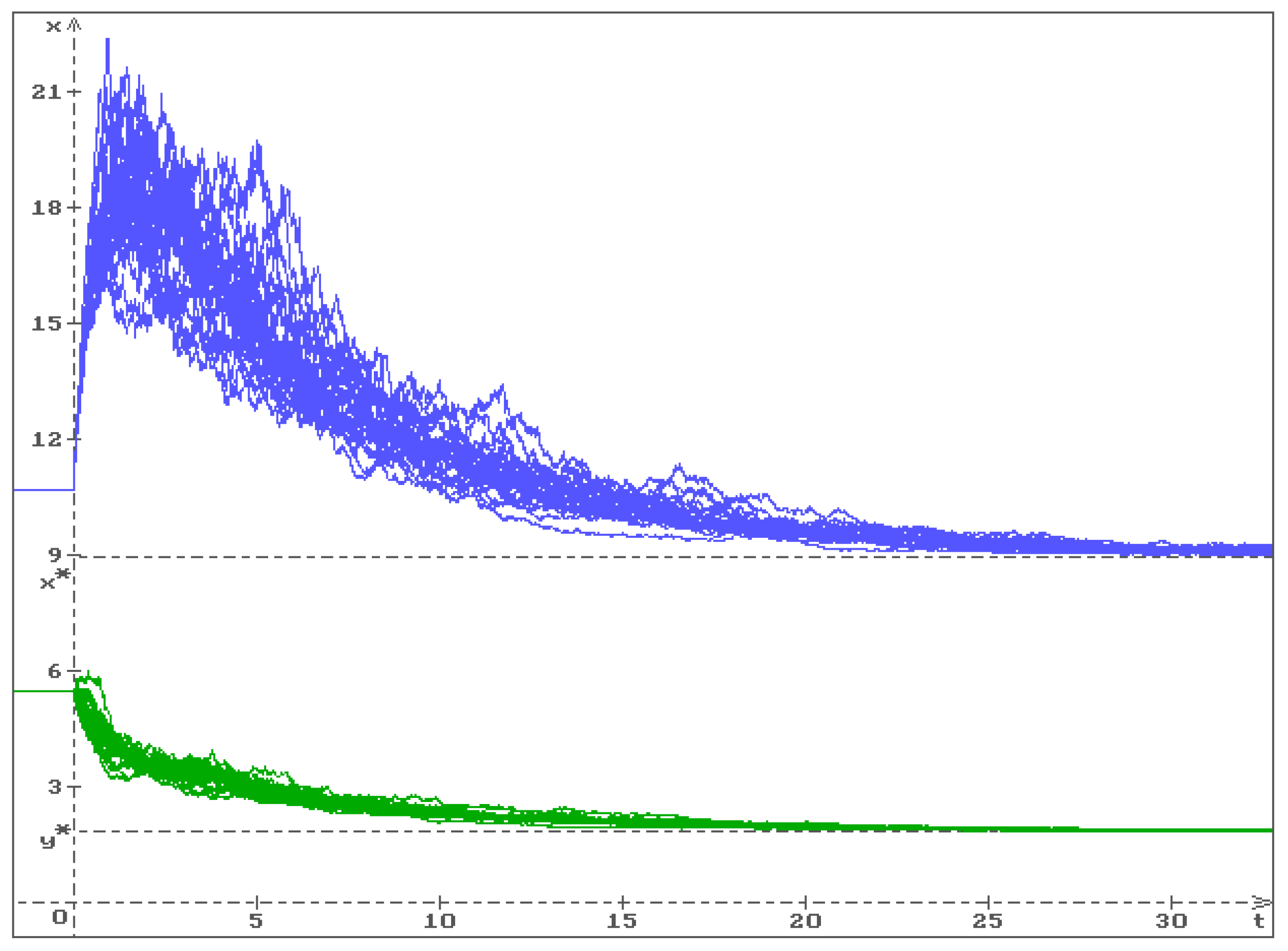
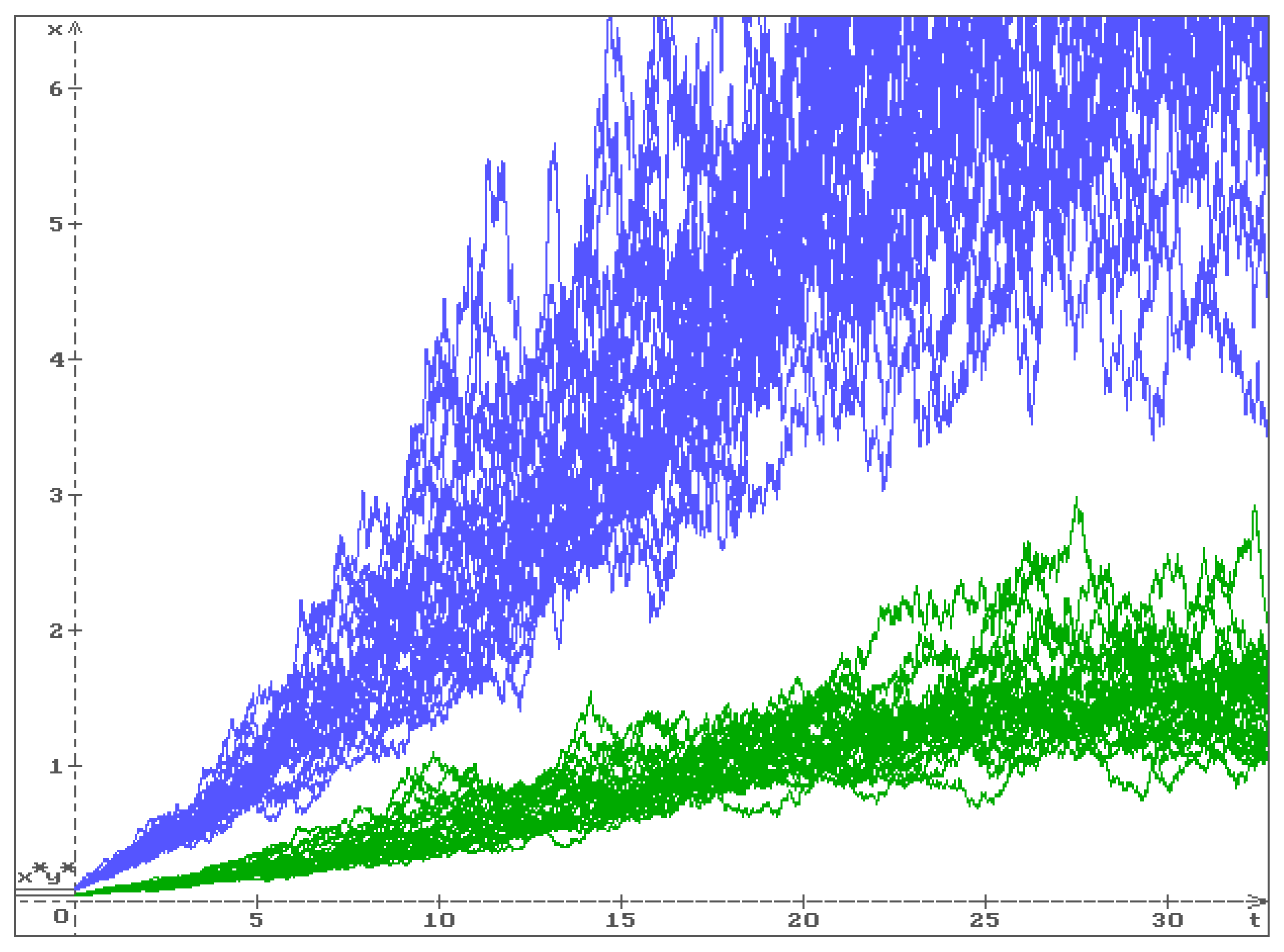
3.4. Examples
4. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Lyapunov Type Theorems
References
- Akhtari, B. Numerical solution of stochastic state-dependent delay differential equations: Convergence and stability. Adv. Differ. Equ. 2019, 396, 34. [Google Scholar] [CrossRef] [Green Version]
- Arthi, G.; Park, J.H.; Jung, H.Y. Existence and controllability results for second-order impulsive stochastic evolution systems with state-dependent delay. Appl. Math. Comput. 2014, 248, 328–341. [Google Scholar] [CrossRef]
- Kazmerchuk, Y.I.; Wu, J.H. Stochastic state-dependent delay differential equations with applications in finance. Funct. Differ. Equations 2004, 11, 77–86. [Google Scholar]
- Parthasarathy, C.; Arjunan, M.M. Controllability results for first order impulsive stochastic functional differential systems with state-dependent delay. J. Math. Comput. Sci. 2013, 3, 15–40. [Google Scholar]
- Zuomao, Y.; Lu, F. Existence and controllability of fractional stochastic neutral functional integro-differential systems with state-dependent delay in Frechet spaces. J. Nonlinear Sci. Appl. 2016, 9, 603–616. [Google Scholar]
- Zuomao, Y.; Zhang, H. Existence of solutions to impulsive fractional partial neutral stochastic integro-differential inclusions with state-dependent delay. Electron. J. Differ. Equ. 2013, 81, 1–21. [Google Scholar]
- Cooke, K.L.; Huang, W. On the problem of linearization for state-dependent delay differential equations. Proc. Am. Math. Soc. 1996, 124, 1417–1426. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, X.; Wei, Y. Dynamics of a stage-structured single population model with state-dependent delay. Adv. Differ. Equ. 2018, 2018, 364. [Google Scholar] [CrossRef] [Green Version]
- Shaikhet, L. Stability of stochastic differential equation with distributed and state-dependent delays. J. Appl. Math. Comput. 2020, 4, 181–188. [Google Scholar] [CrossRef]
- Shaikhet, L. About one method of stability investigation for nonlinear stochastic delay differential equations. Int. J. Robust Nonlinear Control 2021, 31, 2946–2959. [Google Scholar] [CrossRef]
- Shaikhet, L. Some generalization of the method of stability investigation for nonlinear stochastic delay differential equations. Symmetry 2022, 14, 1734. [Google Scholar] [CrossRef]
- Fridman, E.; Shaikhet, L. Stabilization by using artificial delays: An LMI approach. Automatica 2017, 81, 429–437. [Google Scholar] [CrossRef]
- Fridman, E.; Shaikhet, L. Simple LMIs for stability of stochastic systems with delay term given by Stieltjes integral or with stabilizing delay. Syst. Control. Lett. 2019, 124, 83–91. [Google Scholar] [CrossRef]
- Shaikhet, L. Lyapunov Functionals and Stability of Stochastic Functional Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Gikhman, I.I.; Skorokhod, A.V. Stochastic Differential Equations; Springer: Berlin/Heidelberg, Germany, 1972. [Google Scholar]
- Beretta, E.; Kolmanovskii, V.; Shaikhet, L. Stability of epidemic model with time delays influenced by stochastic perturbations. Math. Comput. Simul. 1998, 45, 269–277. [Google Scholar] [CrossRef]
- Kolmanovskii, V.B.; Myshkis, A.D. Introduction to the Theory and Applications of Functional Differential Equations; Kluwer Academic: Dordrecht, The Netherlands, 1999. [Google Scholar]
- Kolmanovskii, V.B.; Nosov, V.R. Stability of Functional Differential Equations; Academic Press: London, UK, 1986. [Google Scholar]
- Melchor-Aguilar, D.; Kharitonov, V.I.; Lozano, R. Stability conditions for integral delay systems. Int. J. Robust Nonlinear Control 2010, 20, 1–15. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaikhet, L. About Stability of Nonlinear Stochastic Differential Equations with State-Dependent Delay. Symmetry 2022, 14, 2307. https://doi.org/10.3390/sym14112307
Shaikhet L. About Stability of Nonlinear Stochastic Differential Equations with State-Dependent Delay. Symmetry. 2022; 14(11):2307. https://doi.org/10.3390/sym14112307
Chicago/Turabian StyleShaikhet, Leonid. 2022. "About Stability of Nonlinear Stochastic Differential Equations with State-Dependent Delay" Symmetry 14, no. 11: 2307. https://doi.org/10.3390/sym14112307
APA StyleShaikhet, L. (2022). About Stability of Nonlinear Stochastic Differential Equations with State-Dependent Delay. Symmetry, 14(11), 2307. https://doi.org/10.3390/sym14112307