
Assessment of Dynamics of a Rail Vehicle in Terms of Running Properties While Moving on a Real Track Model




Abstract
:1. Introduction
2. Research Motivation
3. A Mathematical Approach to the Problem
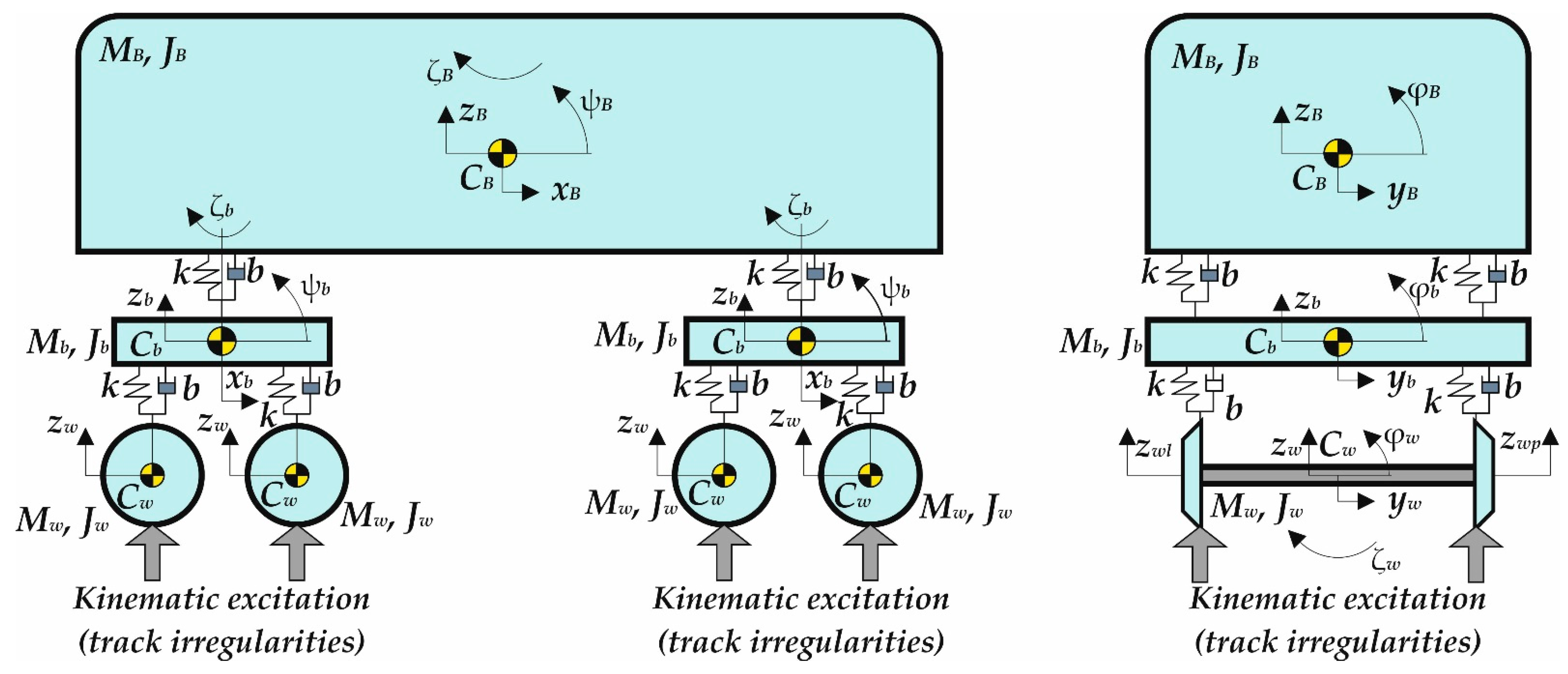
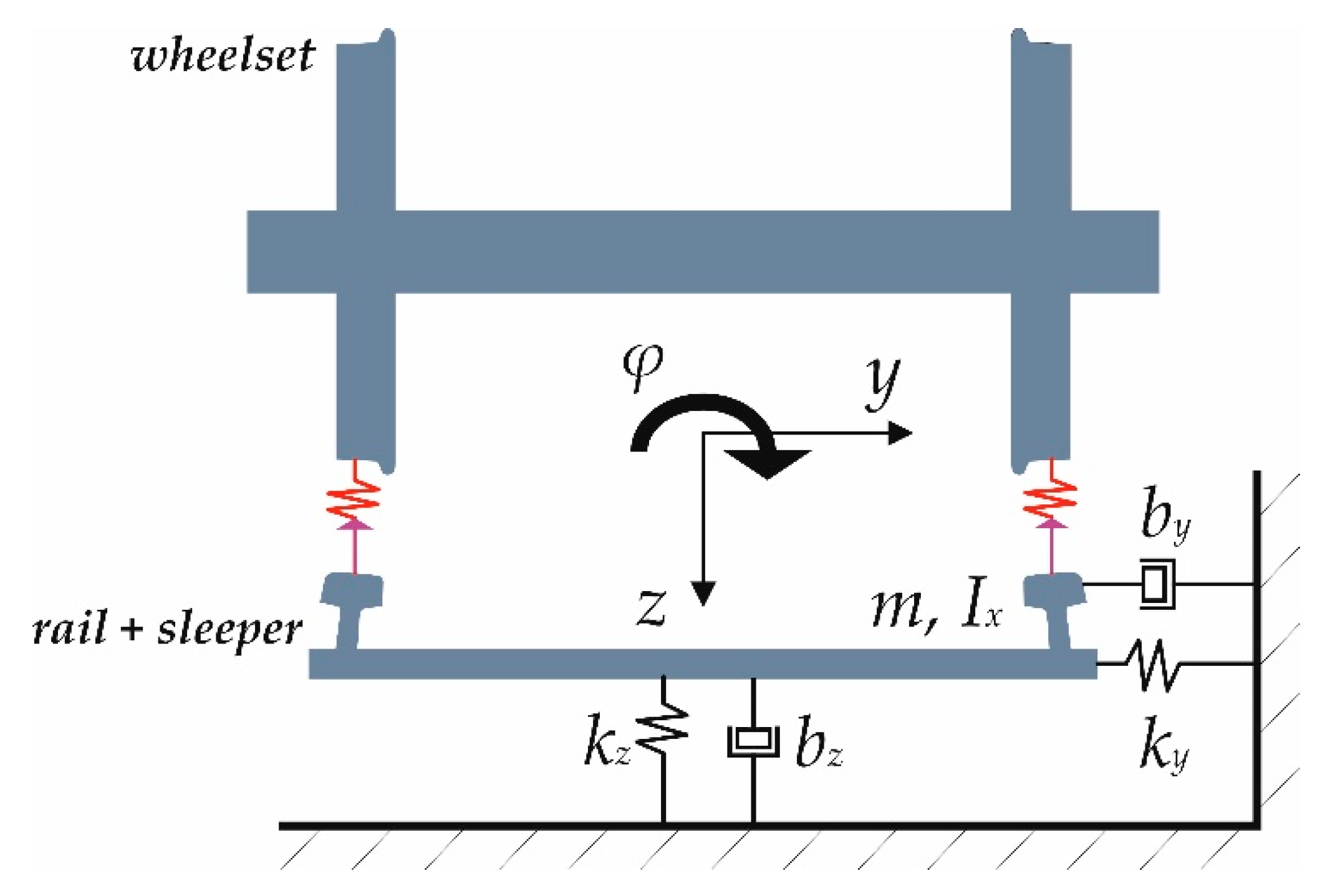
3.1. A Rail Vehicle Model
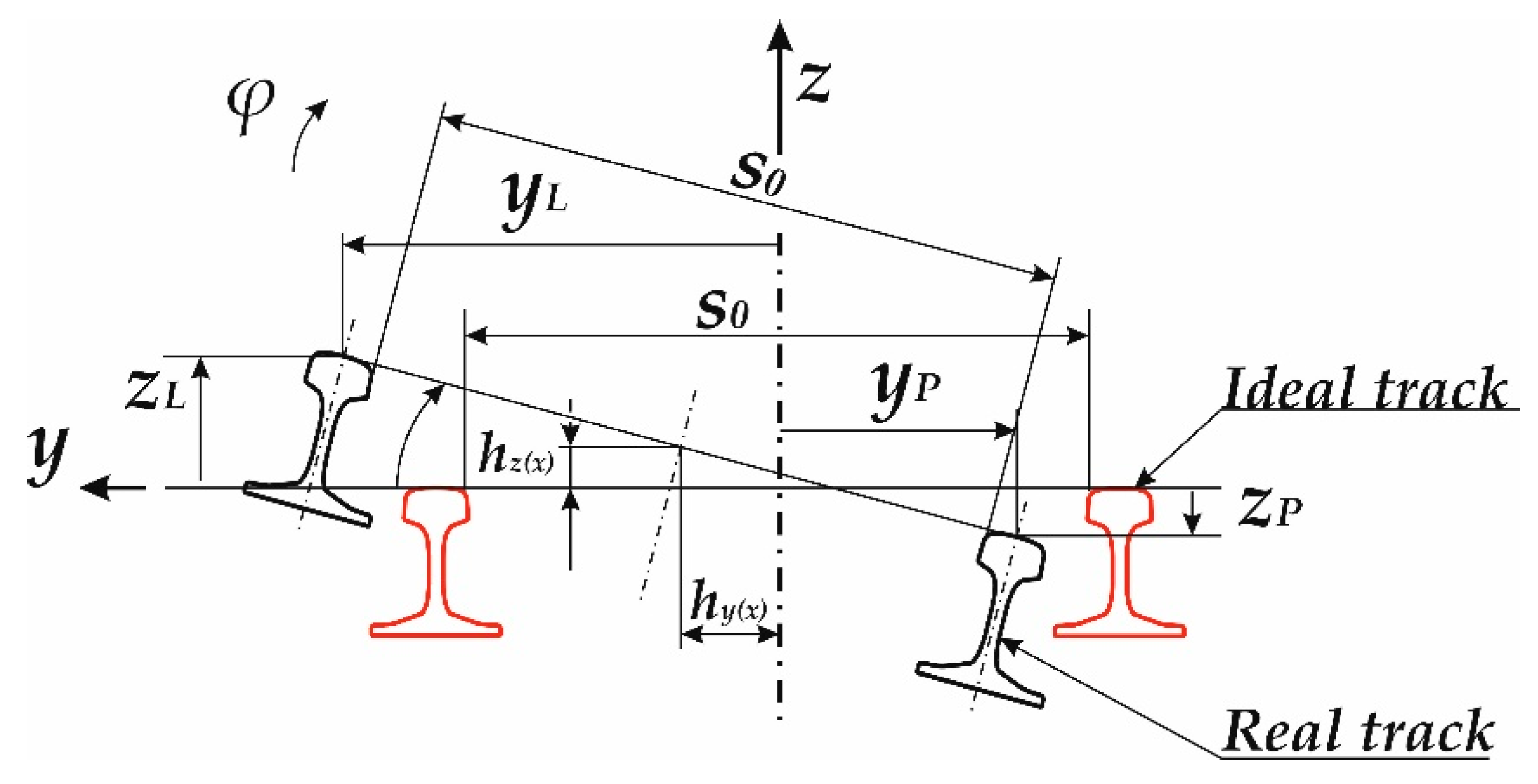
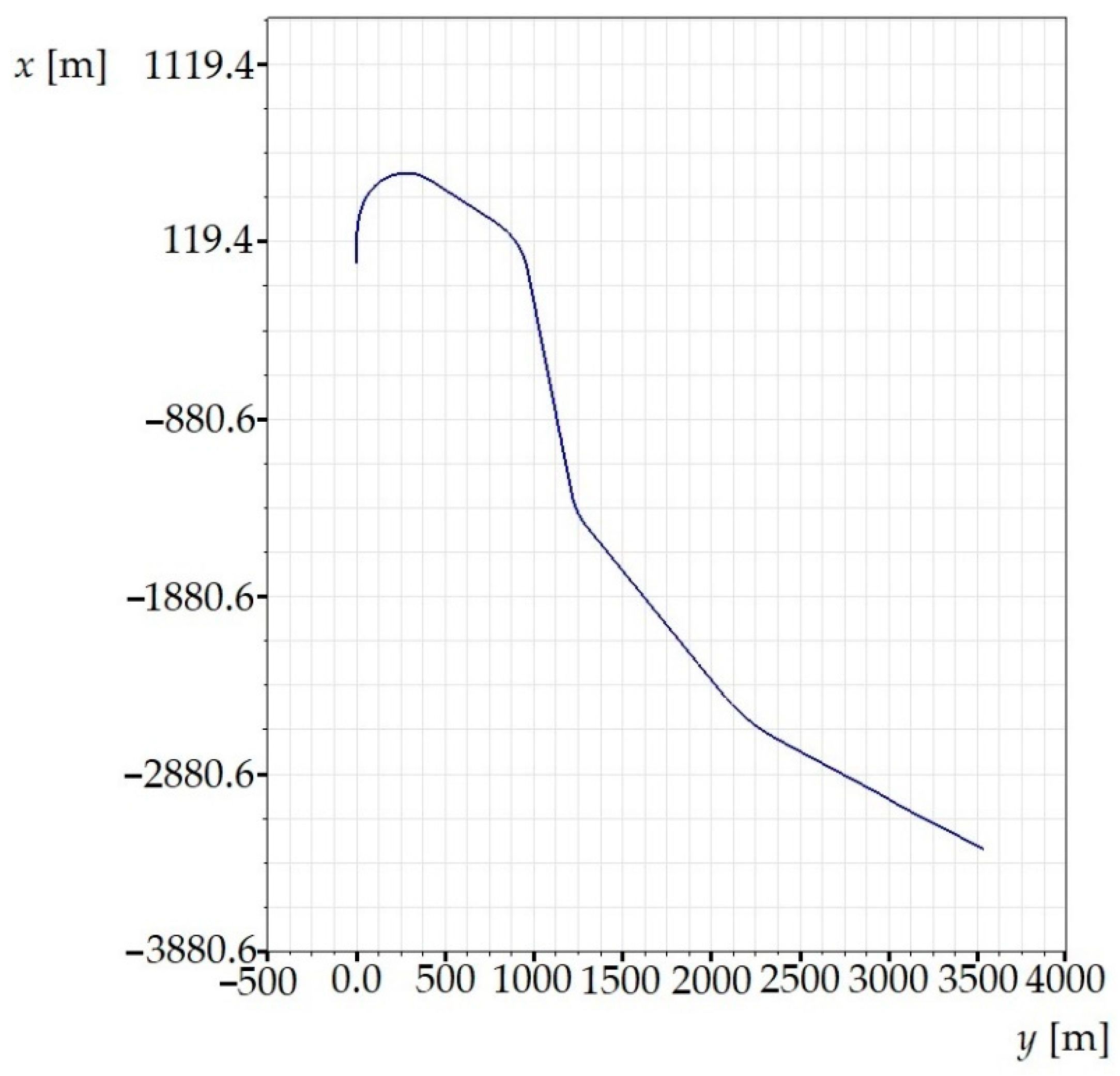
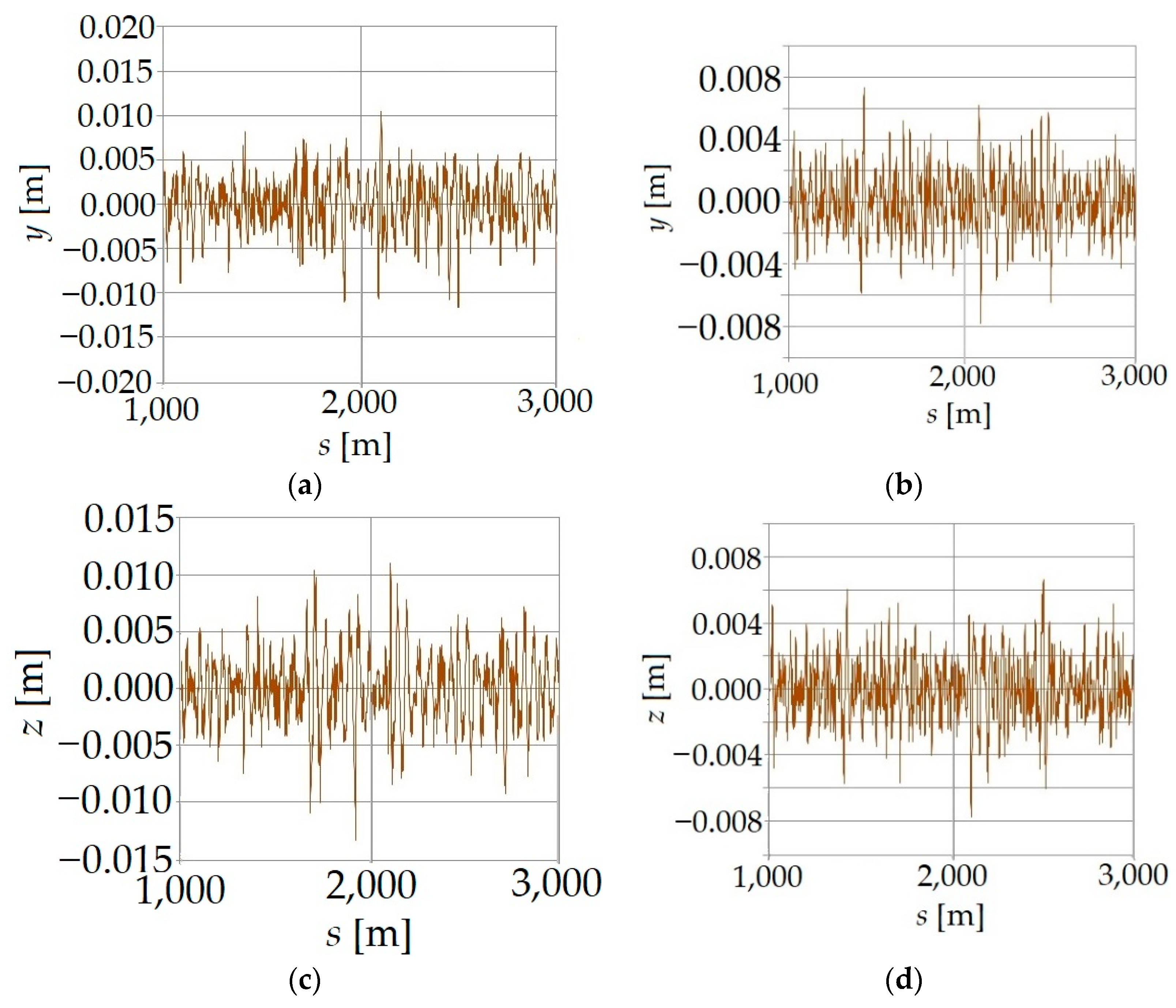
3.2. A Railway Track Model
- A horizontal profile;
- A vertical profile;
- Rail head profiles;
- Track irregularities.
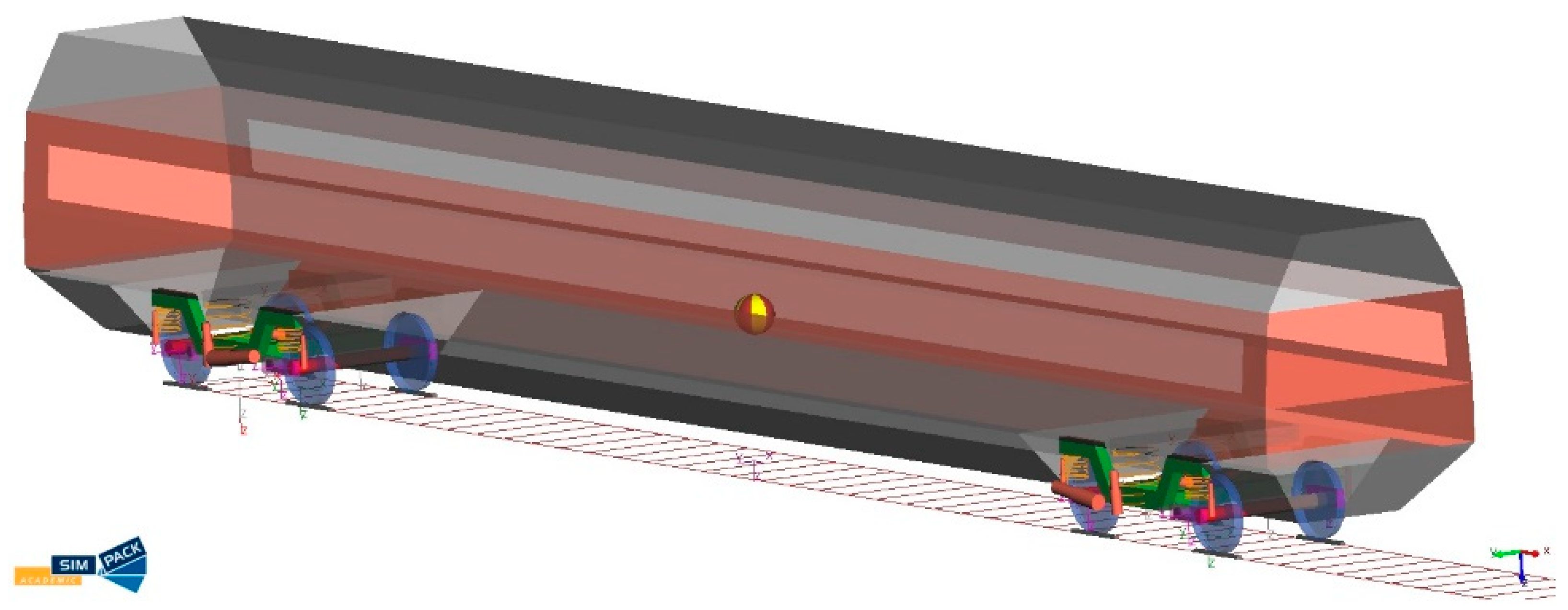
4. A Multibody Model of an Investigated Rail Vehicle and a Railway Track
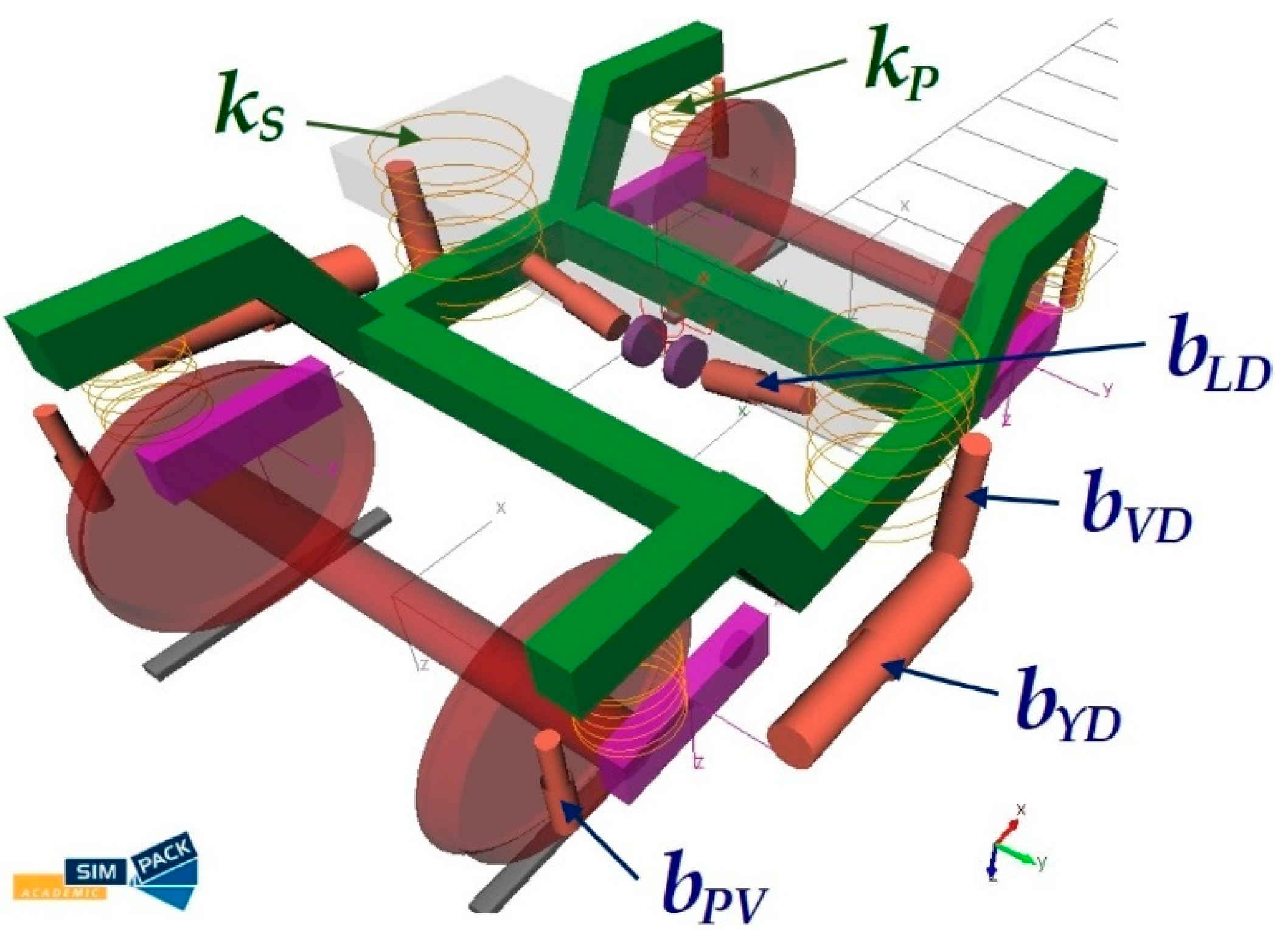
4.1. A Description of a Wagon Model
- kP is the stiffness of the primary spring;
- kS is the stiffness of the secondary spring;
- bPV is the damping coefficient of the primary vertical damper;
- bPY is the damping coefficient of the primary yaw damper;
- bPL is the damping coefficient of the primary lateral damper;
- bSV is the damping coefficient of the secondary vertical damper.
4.2. A Description of a Railway Track Model
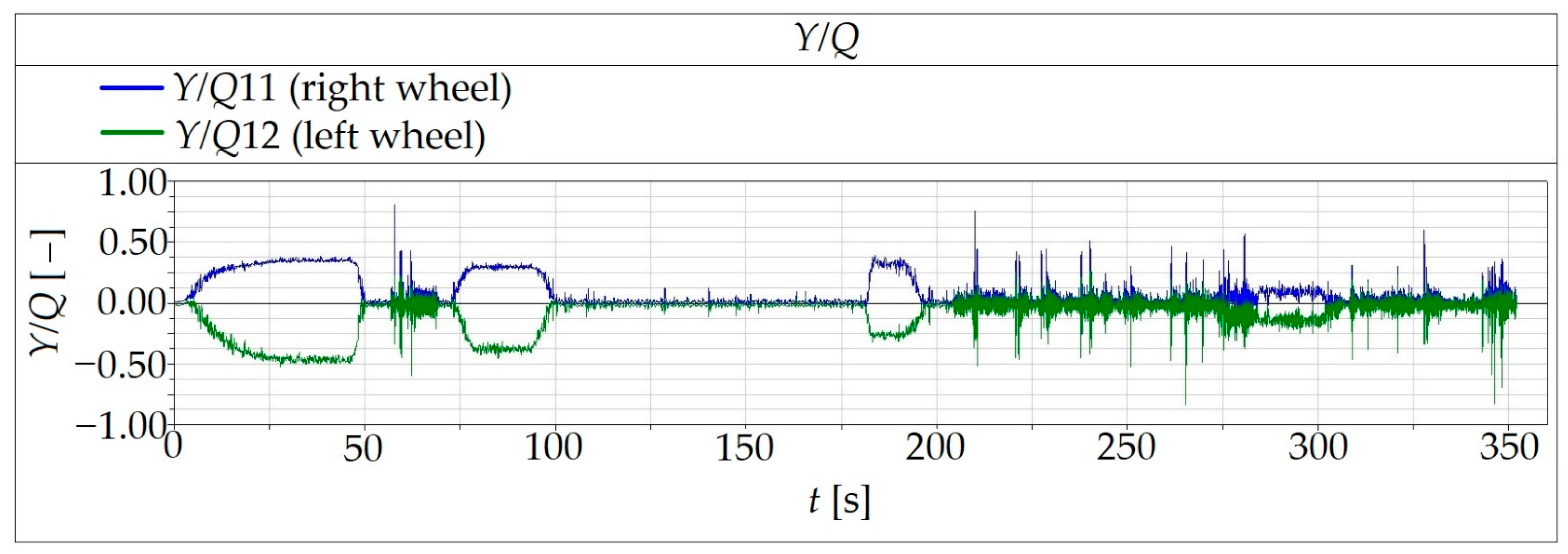
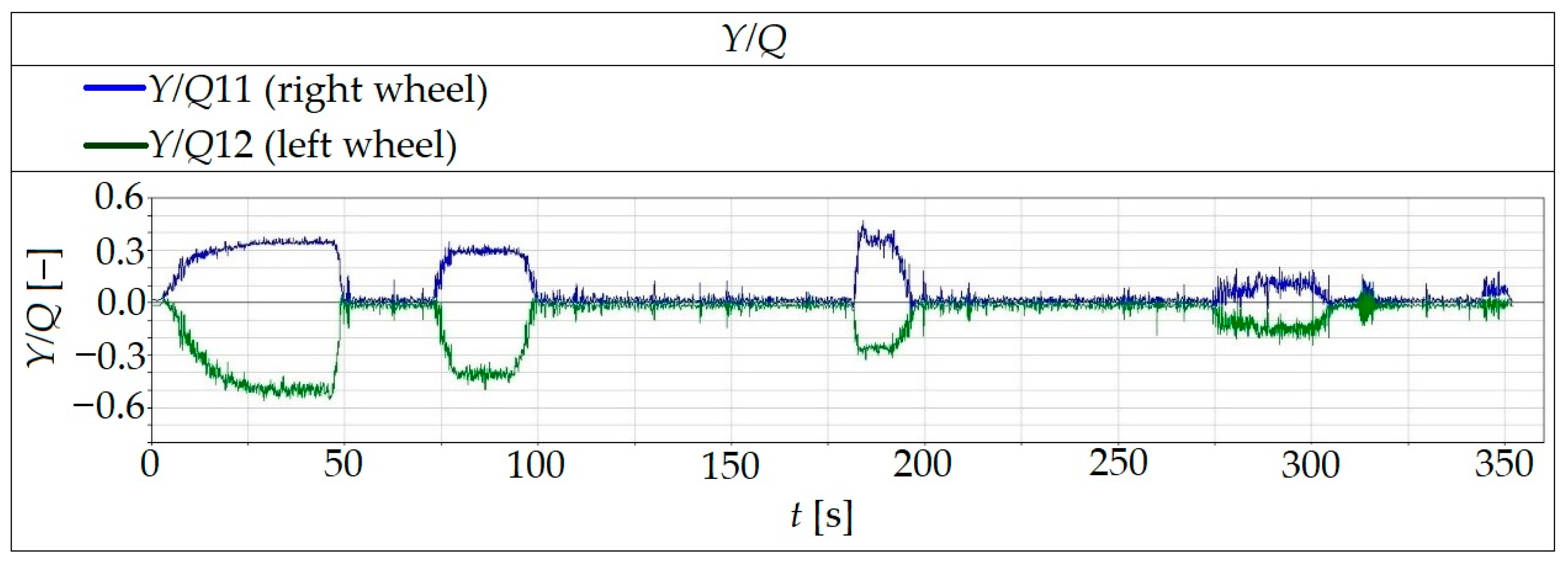
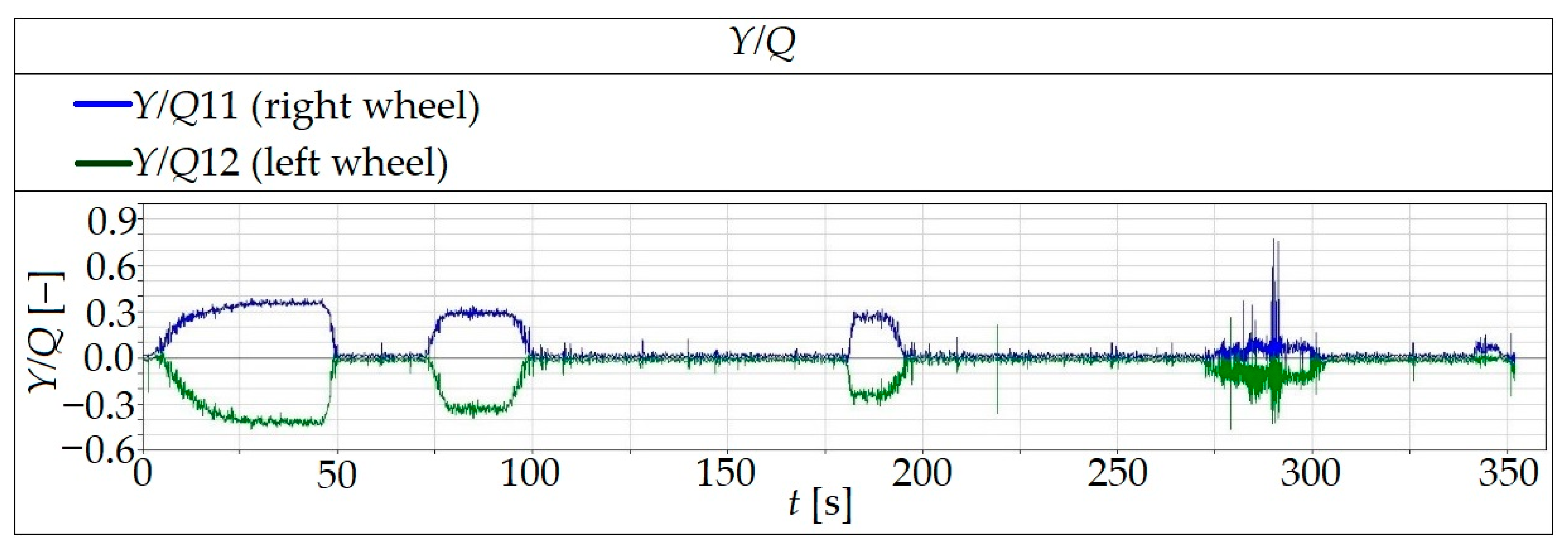
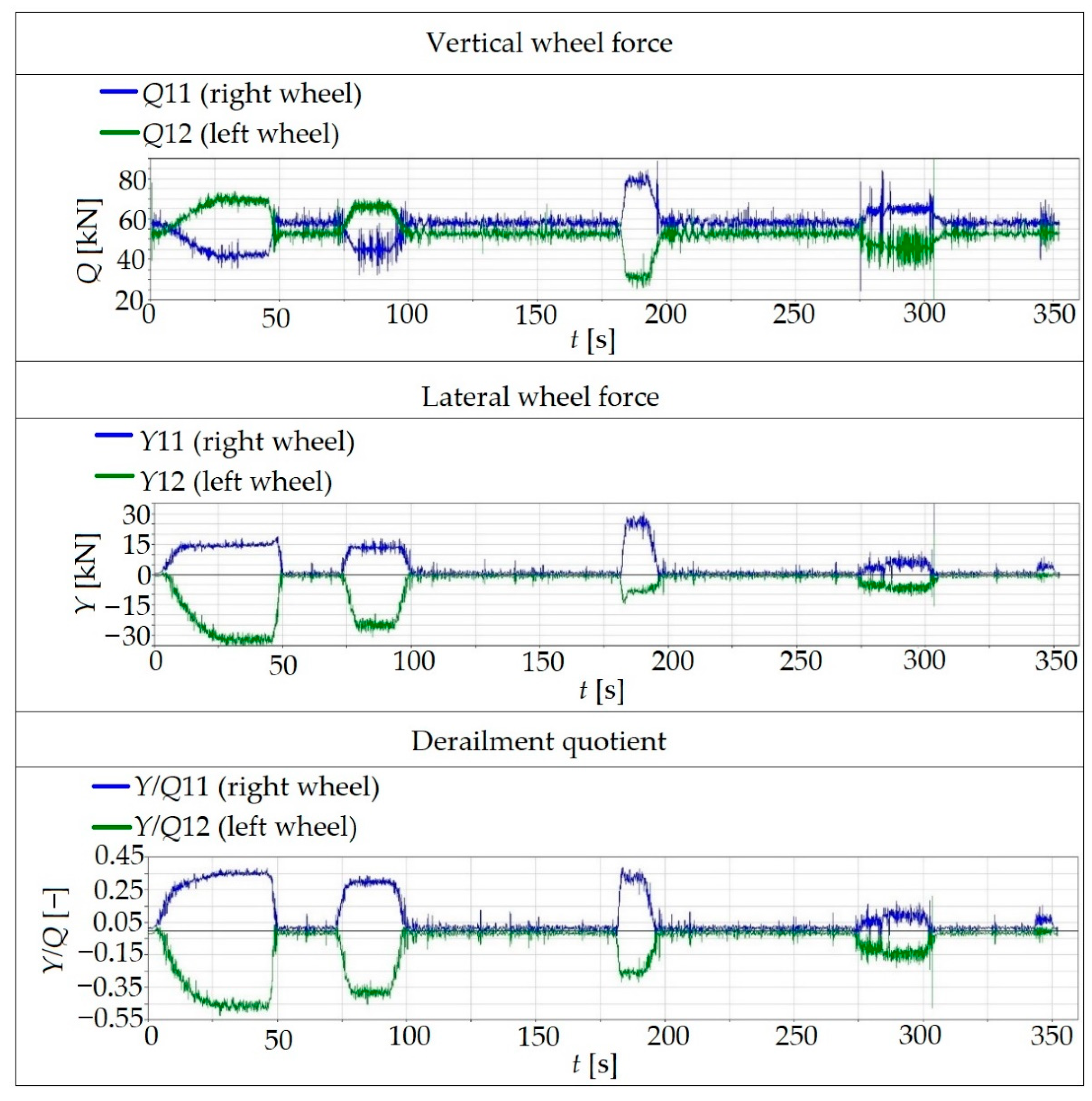
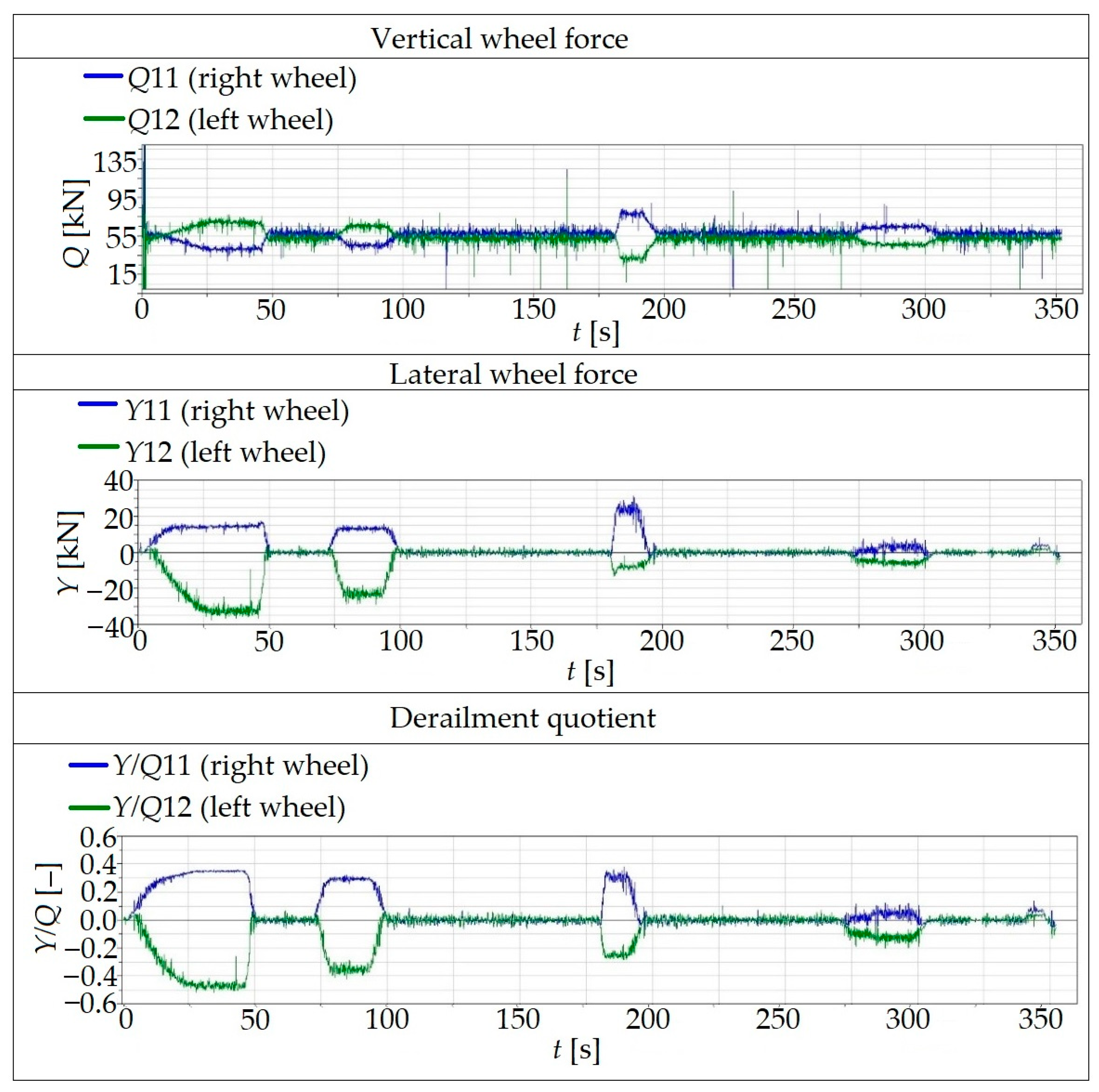
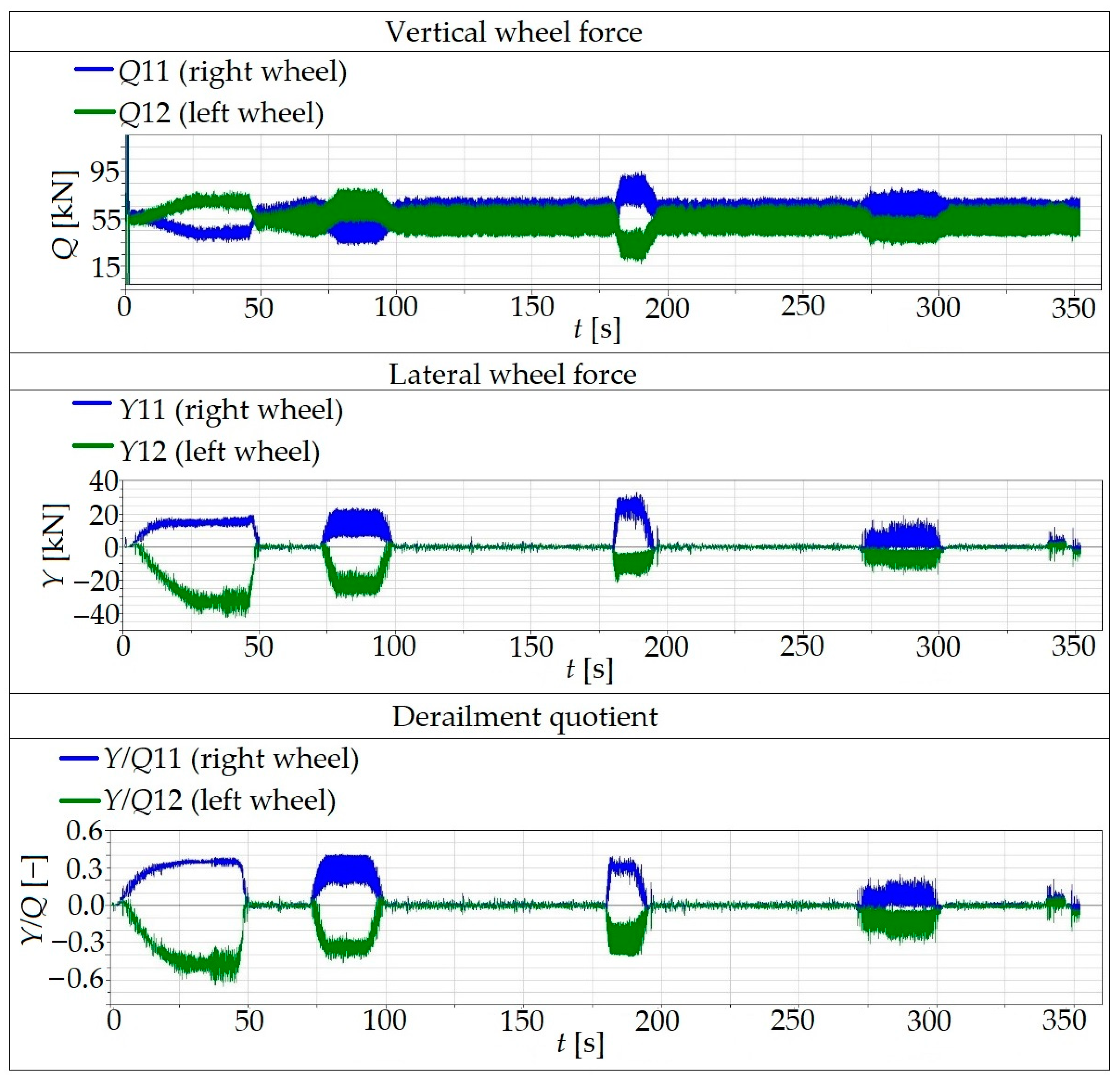
5. Results of Simulation Computations
5.1. Influence of Suspension Parameters Changes
5.2. Influence of Railway Track Flexibility
- By defining constant values of stiffness-damping parameters;
- By defining a functional dependency of stiffness-damping parameters; parameters depend on a travelled distance and such an approach takes into account changes of stiffness-damping parameters under sleepers and between sleepers.
- A rigid track is denoted as “Rigid”;
- A flexible track with constant stiffness-damping parameters is denoted as “Flex_const”;
- A flexible track with variable stiffness-damping parameters is denoted as “Flex_sin”.
6. Conclusions
- The commercial simulation software Simpack has been used for the creation of a multibody model of a rail vehicle;
- A virtual model of a passenger car as well as a railway track model with track flexibility has been set up;
- The dynamic forces and the derailment ratio have been evaluated for three levels of stiffness-damping coefficients of the rail vehicle and for three various track flexibility formulations;
- It was concluded that the stiffness of springs and damping coefficients of dampers of the primary suspension leads to better damping of the rail vehicle mechanical system while running on a track. In the case of the flexible track formulation, the definition of stiffness-damping parameters of the track subsoil leads to higher amplitudes in comparison with the rigid track formulation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Šťastniak, P.; Smetanka, L.; Drozdziel, P. Computer aided simulation analysis for wear investigation of railway wheel running surface. Diagnostyka 2019, 20, 63–68. [Google Scholar]
- Yu, Y.W.; Zhao, L.L.; Zhou, C.C. A new vertical dynamic model for railway vehicle with passenger-train-track coupling vibration. Proc. Inst. Mech. Eng. Part K-J. Multibody Dyn. 2020, 234, 134–146. [Google Scholar] [CrossRef]
- Wu, Y.; Zeng, J.; Qu, S.; Shi, H.L.; Wang, Q.S.; Wei, L. Low-frequency carbody sway modelling based on low wheel-rail contact conicity analysis. Shock Vib. 2020, 2020, 71049. [Google Scholar] [CrossRef]
- Leitner, B. A new approach to identification and modelling of machine dynamic systems behaviour. In Proceedings of the 14th International Conference Transport Means, Kaunas, Lithuania, 21–22 October 2010. [Google Scholar]
- Leitner, B.; Mocova, L.; Hromada, M. A new approach to identification of critical elements in railway infrastructure. In Proceedings of the 10th International Scientific Conference on Transportation Science and Technology (Transbaltica), Vilnius, Lithuania, 4–5 May 2017. [Google Scholar]
- Saga, M.; Jakubovicova, L. Simulation of vertical vehicle non-stationary random vibrations considering various speeds. Sci. J. Sil. Univ. Technol. Ser. Transp. 2014, 84, 113–118. [Google Scholar]
- Saga, M.; Vasko, M.; Handrik, M.; Kopas, P. Contribution to random vibration numerical simulation and optimisation of nonlinear mechanical systems. Sci. J. Sil. Univ. Technol. Ser. Transp. 2019, 103, 143–154. [Google Scholar] [CrossRef]
- Jakubovicova, L.; Sapietova, A.; Moravec, J. Static analysis of transmission tower beam structure. In Proceedings of the 3rd International Scientific Conference on Innovative Technologies in Engineering Production (ITEP), Bojnice, Slovakia, 11–13 September 2018. [Google Scholar]
- Koziak, S.; Chudzikiewicz, A.; Opala, M.; Melnik, R. Virtual software testing and certification of railway vehicle from the point of view of their dynamics. In Proceedings of the 13th International Scientific Conference on Sustainable, Modern and Safe Transport (Transcom), Novy Smokovec, Slovakia, 29–31 May 2019. [Google Scholar]
- Melnik, R.; Sowinski, B. Analysis of dynamics of a metro vehicle model with differential wheelsets. Transp. Probl. 2017, 12, 113–124. [Google Scholar] [CrossRef] [Green Version]
- Shevtsov, Y.I. Wheel/Rail Interface Optimisation; Delft University of Technology: Delft, The Netherlands, 2008. [Google Scholar]
- Muñoz, S.; Aceituno, J.F.; Urda, P.; Escalona, J.L. Multibody model of railway vehicles with weakly coupled vertical and lateral dynamics. Mech. Syst. Signal Process. 2019, 115, 570–592. [Google Scholar] [CrossRef]
- Lack, T.; Gerlici, J.; Maňurová, M. Freight car bogie properties analysis by means of simulation computations. Manuf. Technol. 2016, 16, 733–739. [Google Scholar] [CrossRef]
- Gerlici, J.; Lack, T. Modified HHT method for vehicle vibration analysis in time domain utilization. Appl. Mech. Mater. 2014, 486, 396–405. [Google Scholar] [CrossRef]
- Gerlici, J.; Sakhno, V.; Yefymenko, A.; Verbitskii, V.; Kravchenko, A.; Kravchenko, K. The stability analysis of two-wheeled vehicle model. In Proceedings of the 22nd Slovak-Polish Scientific Conference on Machine Modelling and Simulations (MMS), Sklene Teplice, Slovakia, 5–8 September 2017. [Google Scholar]
- Chudzikiewicz, A.; Opala, M. Application of computer simulation methods for running safety assessment of railway vehicles in example of freight cars. New Trends Mech. Transp. 2008, 9, 63–71. [Google Scholar] [CrossRef]
- Opala, M. Analysis of experimental data in the context of safety against derailment of a railway vehicle, using the energy method. Key Eng. Mater. 2012, 518, 16–23. [Google Scholar] [CrossRef]
- Opala, M. Statistical inference of the railway vehicle running safety using monitoring data. In Proceedings of the Mini Conference on Vehicle System Dynamics, Identification and Anomalies, Budapest, Hungary, 5–7 November 2012. [Google Scholar]
- Bureika, G.; Levinzon, M.; Dailydka, S.; Steisunas, S.; Zygiane, R. Evaluation criteria of wheel/rail interaction measurement results by trackside control equipment. Int. J. Heavy Veh. Syst. 2019, 26, 747–764. [Google Scholar] [CrossRef]
- Sowiński, B.; Stelmach, A.; Chudzikiewicz, A. Simulation analysis of the influence of changes in track parameters on running safety of a rail vehicle. Energies 2021, 14, 5882. [Google Scholar] [CrossRef]
- Smetanka, L.; Dižo, J.; Šťastniak, P.; Blatnický, M. Wear calculation of wheel tread surface of a rail vehucle by means of the SIMPACK programe. Railw. Transp. Logist. Sci. Tech. J. Railw. Transp. Logist. Manag. 2017, 13, 19–24. (In Slovak) [Google Scholar]
- Smetanka, L.; Šťastniak, P.; Dižo, J. Comparison of wear laws programed in the SIMPACK software. In Proceedings of the Experimental and Calculation Methods in Engineering, Ústí Nad Labem, Czech Republic, 22–23 June 2017. (In Slovak). [Google Scholar]
- Dižo, J. Evaluation of ride comfort for passengers by means of computer simulation. Manuf. Technol. 2015, 15, 8–14. [Google Scholar] [CrossRef]
- Dižo, J.; Blatnický, M. Investigation of ride properties of a three-wheeled electric vehicle in terms of driving safety. In Proceedings of the 13th International Scientific Conference on Sustainable, Modern and Safe Transport (TRANSCOM 2019), Novy Smokovec, Slovakia, 29–31 May 2019; Bujnak, J., Guagliano, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Dižo, J.; Blatnický, M. Evaluation of vibrational properties of a three-wheeled vehicle in terms of comfort. Manuf. Technol. 2019, 19, 197–203. [Google Scholar]
- Dižo, J.; Blatnický, M.; Steišūnas, S.; Skočilasová, B. Assessment of a rail vehicle running with the damaged wheel on a ride comfort for passengers. In Proceedings of the Machine Modelling and Simulations, Sklene Teplice, Slovakia, 5–8 September 2017. [Google Scholar]
- EN 14363: Railway Applications—Testing for the Acceptance of Running Characteristics of Railway Vehicles (2005) Testing of Running Behavior and Stationary Tests; European Committee for Standardization: Brussels, Belgium, 2005.
- Testing and Approval of Railway Vehicles from the Point of View of Their Dynamic Behavior (2003) Safety—TRACK Fatigue—RIDE Quality; UIC Code 518; International Union of Railways: Paris, France, 2003.
- Zhai, W. Vehicle–Track Coupled Dynamics; Springer: Singapore, 2020. [Google Scholar]
- Song, Y.; Wang, Z.; Liu, Z.; Wang, R. A spatial coupling model to study dynamic performance of pantograph-catenary with vehicle-track excitation. Mech. Syst. Signal Process. 2021, 151, 107336. [Google Scholar] [CrossRef]
- Kisilowski, J.; Kowalik, R. Mechanical wear contact between the wheel and rail on a turnout with variable stiffness. Energies 2021, 14, 7520. [Google Scholar] [CrossRef]
- Izvolt, L.; Dobes, P.; Drusa, M.; Kadela, M.; Holesova, M. Experimental and numerical verification of the railway track substructure with innovative thermal insulation materials. Materials 2022, 15, 160. [Google Scholar] [CrossRef]
- Pavlik, A.; Gerlici, J.; Lack, T.; Hauser, V.; Šťastniak, P. Prediction of the rail-wheel contact wear of an innovative bogie by simulation analysis. Transp. Res. Procedia 2019, 40, 855–860. [Google Scholar] [CrossRef]
- Lack, T.; Gerlici, J.; Stastniak, P. Wheelset/rail geometric characteristics and contact forces assessment with regard to angle of attack. In Proceedings of the 23rd Polish-Slovak Scientific Conference on Machine Modelling and Simulations (MMS), Rydzyna, Slovakia, 4–7 September 2018. [Google Scholar]
- Hauser, V.; Nozhenko, O.; Kravchenko, K.; Loulova, M.; Gerlici, J.; Lack, T. Proposal of a steering mechanism of a tram bogie with three axle boxes. In Proceedings of the 12th International Scientific Conference of Young Scientists on Sustainable, Modern and Safe Transport, High Tatras, Slovakia, 31 May–1 June 2017. [Google Scholar]
- Šťastniak, P. Freight long wagon dynamic analysis in S-curve by means of computer simulation. Manuf. Technol. J. Sci. Res. Prod. 2015, 15, 930–935. [Google Scholar] [CrossRef]
- Lack, T.; Gerlici, J. Modified strip method utilization for wheel/rail contact stress evaluation. In Proceedings of the 9th International Conference on Contact Mechanics and Wear of Rail/Wheel Systems (CM), Chengdu, China, 27–30 August 2012; pp. 87–89. [Google Scholar]
- Mikaliunas, Š.; Lingaltis, L.P.; Vaičiunas, G. The analysis of wear intensity of lubricated and unlubricated locomotive wheelsets flanges. Transport 2004, 19, 32–39. [Google Scholar] [CrossRef] [Green Version]
- Vaičiunas, G.; Steišiunas, S. Sperlings comfort index study in a passenger car with independently rotating wheels. Transp. Probl. 2021, 16, 121–130. [Google Scholar] [CrossRef]
- Gerlici, J.; Lack, T. Contact of the Railway Wheelset and a Track, 1st ed.; University of Žilina: Žilina, Slovakia, 2004. (In Slovak) [Google Scholar]
- Mikhailov, E.; Sapronova, S.; Tkachenko, V.; Semenov, S.; Smyrnova, I.; Kholostenko, Y. Improved solution of guiding of railway vehicle in curves. In Proceedings of the 23rd International Scientific Conference on Transport Means 2019 (TRANSPORT MEANS 2019), Palanga, Lithuania, 2–4 October 2019. [Google Scholar]
- Mikhailov, E.; Semenov, S.; Sapronova, S.; Tkachenko, V. On the issue of wheel flange sliding along the rail. In Proceedings of the 11th Tarnsbaltica International Scientific Conference, Vilnius, Lithuania, 2–3 May 2019. [Google Scholar]
- Kapitsa, M.; Mikhailov, E.; Kliuiev, S.; Semenov, S.; Kovtanets, M. Study of rail vehicles moveemnt characteristics improvement in curves using fuzzy mechantronic systems. In Proceedings of the 2nd International Scientiifc and Practical Conference on Energy-Optimal Technologies, Logistic and Safery on Transport (EOT), Lviv, Ukraine, 19–20 September 2019. [Google Scholar]
- Nangolo, N.F.; Klimenda, F. System identification for underdamped mechanical systems. In Proceedings of the 52nd International Conference on Experimental Stress Analysis (EAN 2014), Marianske Lazne, Czech Republic, 2–5 June 2014. [Google Scholar]
- Kostrzewski, M. Analysis of selected acceleration signals measurements obtained during supervised service conditions—Study of hitherto approach. J. Vibroeng. 2018, 20, 1850–1866. [Google Scholar] [CrossRef] [Green Version]
- Klimenda, F.; Soukup, J.; Skošilasová, B.; Skošilas, J. Vertical vibration of the vehicle when crossing over transverse speed bumps. Manuf. Technol. 2020, 20, 55–59. [Google Scholar] [CrossRef]
- Chudzikiewicz, A.; Bogacz, R.; Kostrzewski, M. Using acceleration signals recorded on a railway vehicle wheelsets for rail track condition monitoring. In Proceedings of the 7th European Workshop on Structural Health Monitoring (EWSHM), 2nd European Conference of the Prognostics and Health Management Society (PHM), Nantes, France, 8–11 July 2014. [Google Scholar]
- Fomin, O.; Lovska, A.; Píštek, V.; Kučera, P. Dynamic load effect on the transportation safety of tank containers as part of combined trains on railway ferries. Vibroeng. Procedia 2019, 29, 124–129. [Google Scholar] [CrossRef]
- Fomin, O.; Lovska, A. Determination of dynamic loading of bearing structures of freight wagons with actual dimensions. East Eur. J. Enterp. Technol. 2021, 2, 6–14. [Google Scholar] [CrossRef]
- Gorbunov, M.; Kravchenko, K.; Kara, S.; Gerlici, J.; Bureika, G.; Steišunas, S. Theory and practice of the innovative spring suspension design for locomotive to improve its traction and dynamic characteristics. In Proceedings of the 22nd International Scientific Conference on Transport Means, Trakai, Lithuania, 3–5 October 2018. [Google Scholar]
- Fomin, O.; Vatulia, G.; Gerlici, J.; Kravchenko, K. Stability study of tank containers placed on a roll-trailer during transportation by railway ferry. Transnav 2021, 15, 315–319. [Google Scholar] [CrossRef]
- Grassie, S.L.; Cox, S.J. The dynamic response of railway track with flexible sleepers to high frequency vertical excitation. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 1984, 198, 117–124. [Google Scholar] [CrossRef]
- Moravčík, M. Vertical track stiffness effect on dynamic behaviour of track structure. Commun. Sci. Lett. Univ. Žilina 2004, 6, 10–16. [Google Scholar]
- Ning, J.; Lin, J.; Zhang, B. Time-frequency processing of track irregularities in high-speed train. Mech. Syst. Signal Process. 2019, 66–67, 339–348. [Google Scholar] [CrossRef]
- Lei, X.; Noda, N.A. Analyses of dynamic response of vehicle and track coupling with random irregularity of track vertical profile. J. Sound Vib. 2002, 258, 147–165. [Google Scholar] [CrossRef]
- Bitterer, L. A Track Geometry; University of Žilina: Žilina, Slovakia, 1997. (In Slovak) [Google Scholar]
- Wicknes, A.H. Fundamentals of Rail Vehicle Dynamics: Guidance and Stability; Swets & Zeitlinger B.V.: Lisse, Japan, 2003. [Google Scholar]
- Berggren, E.G.; Li, M.X.; Spännar, J. A new approach to the analysis and presentation of vertical track geometry quality and rail roughness. Wear Int. J. Sci. Technol. Frict. Lubr. Wear 2008, 265, 1488–1496. [Google Scholar] [CrossRef]
- Kalinčák, D.; Gerlici, J.; Kukuča, P.; Lábaj, J.; Lack, T.; Polách, O.; Sága, M. A Transport Means—Computational Methods; EDIS: Žilina, Slovakia, 2005. (In Slovak) [Google Scholar]
- Pombo, J.; Ambrósio, J. An alternative method to include track irregularities in railway vehicle dynamic analyses. Nonlinear Dyn. 2012, 68, 161–176. [Google Scholar] [CrossRef]
- Panunzio, A.M.; Puel, G.; Cottereau, R.; Simon, S.; Quost, X. Construction of a stochastic model of track geometry irregularities and validation through experimental measurements of dynamic loading. Veh. Syst. Dyn. 2017, 55, 399–426. [Google Scholar] [CrossRef]
- Javaid, O.; Choi, D.H. Effect of Track Irregularities on the Response of Two-Way Railway Tracks. Appl. Sci. 2020, 10, 11. [Google Scholar] [CrossRef] [Green Version]
- N.N.: Benchmark Problem Results and Assessment. In Bogies with Steered or Steering Wheelsets; ORE (ERRI) B 176/3, DT290; ORE (ERRI): Utrecht, The Netherlands, 1993.
- Milosevic, M.D.G.; Pålsson, B.A.; Nissen, A.; Nielsen, J.C.O.; Johansson, H. Condition monitoring of railway crossing geometry via measured and simulated track responses. Sensors 2022, 22, 1012. [Google Scholar] [CrossRef]
- Sañudo, R.; Jardí, I.; Martínez, J.-C.; Sánchez, F.J.; Miranda, M.; Alonso, B.; dell’Olio, L.; Moura, J.-J. Monitoring track transition zones in Railways. Sensors 2022, 22, 76. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stiffness | Damping | ||||
|---|---|---|---|---|---|
| Designation | Name | kP | kS | bPV | bSV |
| O | Original | 0% | 0% | 0% | 0% |
| I | Modification I | −45% | +45% | −45% | +45% |
| II | Modification II | +45% | −45% | +45% | −45% |
| Parameter | Designation | Value |
|---|---|---|
| Stiffness in the vertical direction | kz | 1.49 × 108 N/m |
| Damping in the vertical direction | bz | 2.10 × 105 Ns/m |
| Stiffness in the lateral direction | ky | 4.21 × 107 N/m |
| Damping in the lateral direction | by | 10.12 × 104 Ns/m |
| Torsion stiffness (around x axis) | kφ | 8.77 × 107 Nm/rad |
| Torsion damping (around x axis) | bφ | 1.25 × 105 Nms/rad |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dižo, J.; Blatnický, M.; Harušinec, J.; Suchánek, A. Assessment of Dynamics of a Rail Vehicle in Terms of Running Properties While Moving on a Real Track Model. Symmetry 2022, 14, 536. https://doi.org/10.3390/sym14030536
Dižo J, Blatnický M, Harušinec J, Suchánek A. Assessment of Dynamics of a Rail Vehicle in Terms of Running Properties While Moving on a Real Track Model. Symmetry. 2022; 14(3):536. https://doi.org/10.3390/sym14030536
Chicago/Turabian StyleDižo, Ján, Miroslav Blatnický, Jozef Harušinec, and Andrej Suchánek. 2022. "Assessment of Dynamics of a Rail Vehicle in Terms of Running Properties While Moving on a Real Track Model" Symmetry 14, no. 3: 536. https://doi.org/10.3390/sym14030536
APA StyleDižo, J., Blatnický, M., Harušinec, J., & Suchánek, A. (2022). Assessment of Dynamics of a Rail Vehicle in Terms of Running Properties While Moving on a Real Track Model. Symmetry, 14(3), 536. https://doi.org/10.3390/sym14030536