
The Dual Expression of Parallel Equidistant Ruled Surfaces in Euclidean 3-Space



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- What applications might this study have in the robot kinematics?
- What kind of contributions can this study make to the field of physics if it is studied in the different spaces?
2. Preliminaries
2.1. Some Preliminaries on -Modul
2.2. The Parallel p-Equidistant Ruled Surfaces in
- The generator vectors are parallel;
- The distance p between the polar planes at the suitable points of the ruled surfaces and is constant.
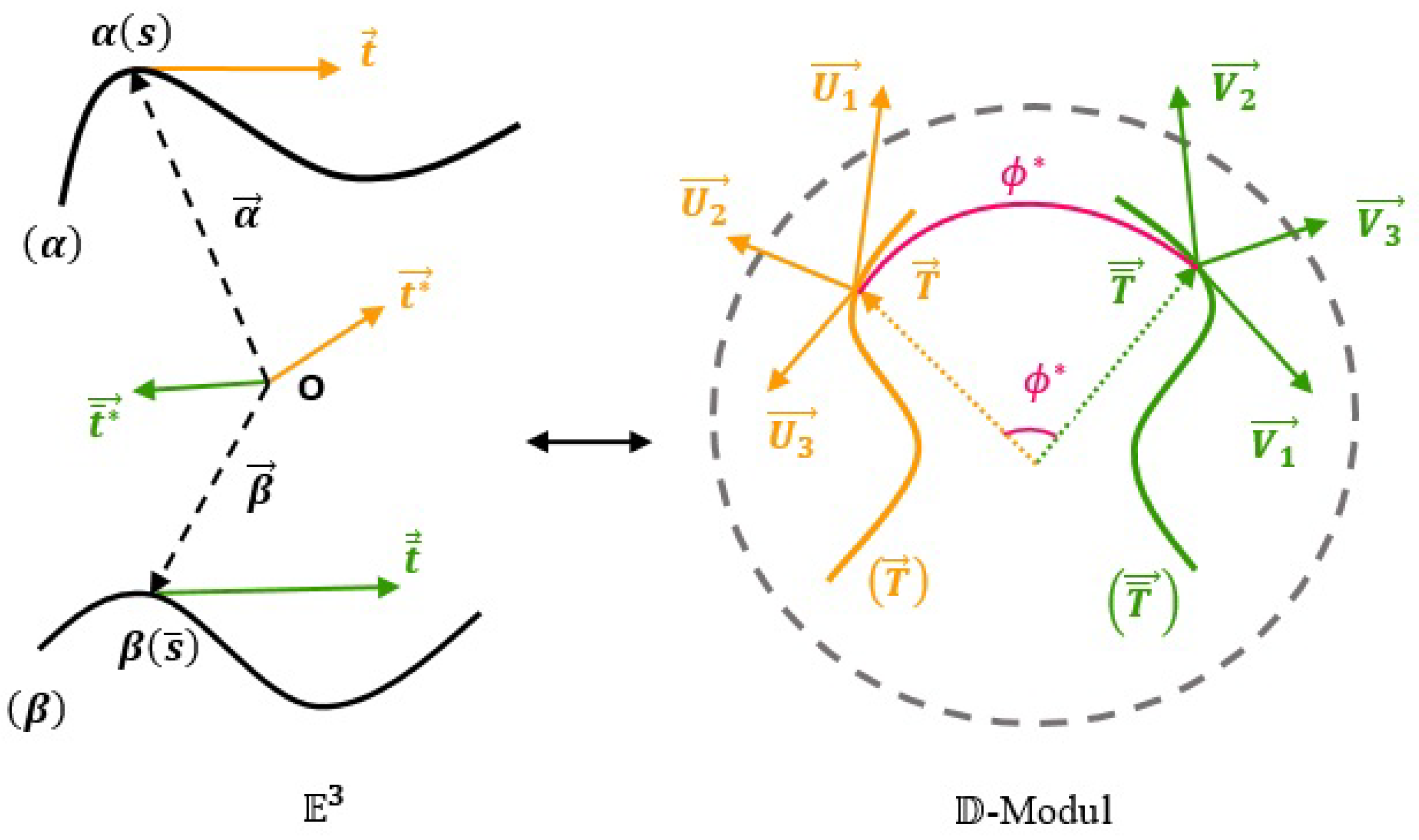
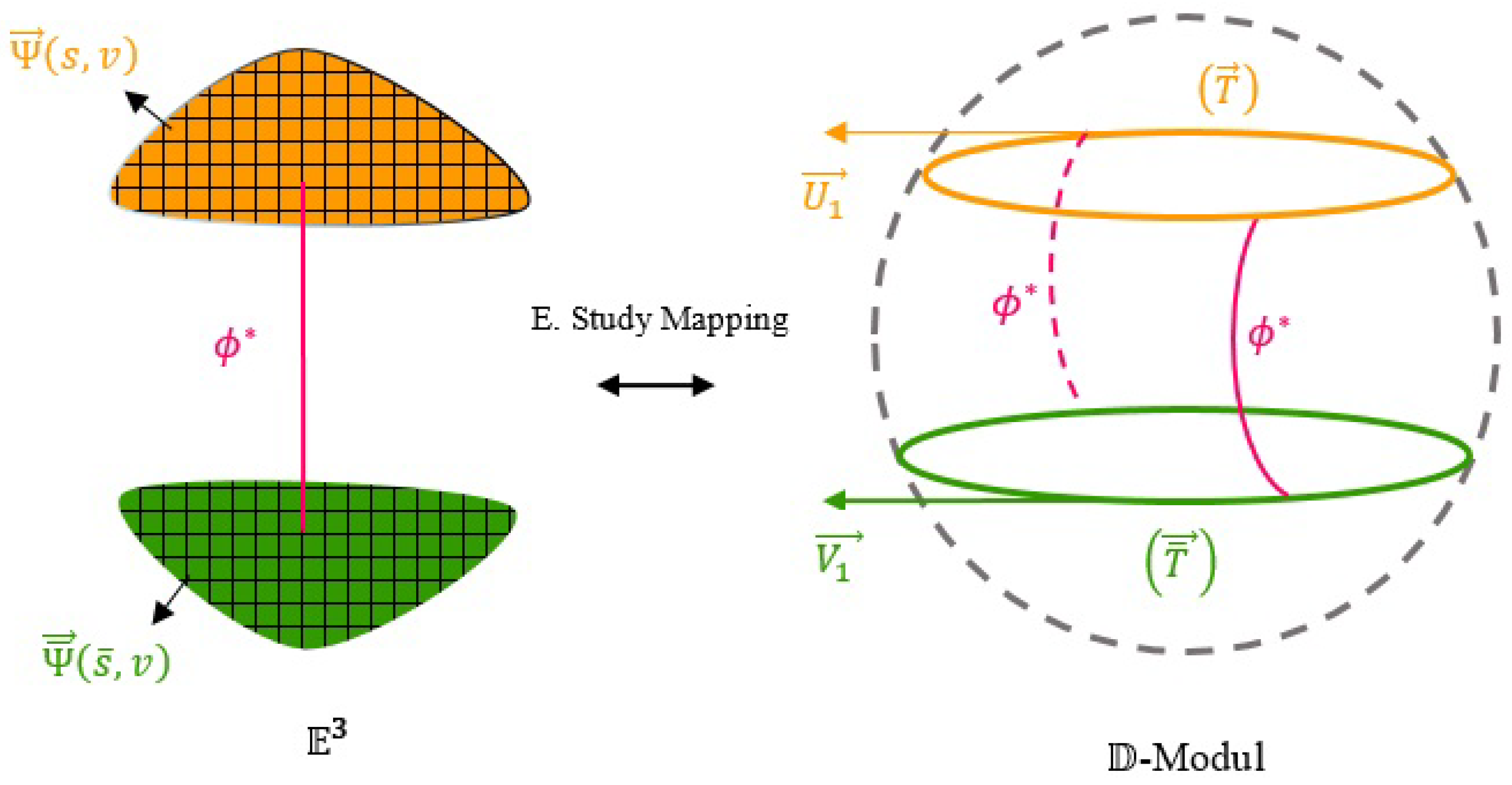
3. The Dual Expression of Parallel Equidistant Ruled Surfaces in Euclidean 3-Space
- The dual generator vectors and are parallel;
- The distance between these vectors at the corresponding points of the ruled surfaces is constant.
3.1. The Relationships between the Blaschke Vectors and the Blaschke Invariants and of DPERS
3.2. The Relationship between the Striction Curves of DPERS
3.3. The Relationships between the Darboux Screws and The Instantaneous Screw Axes of DPERS
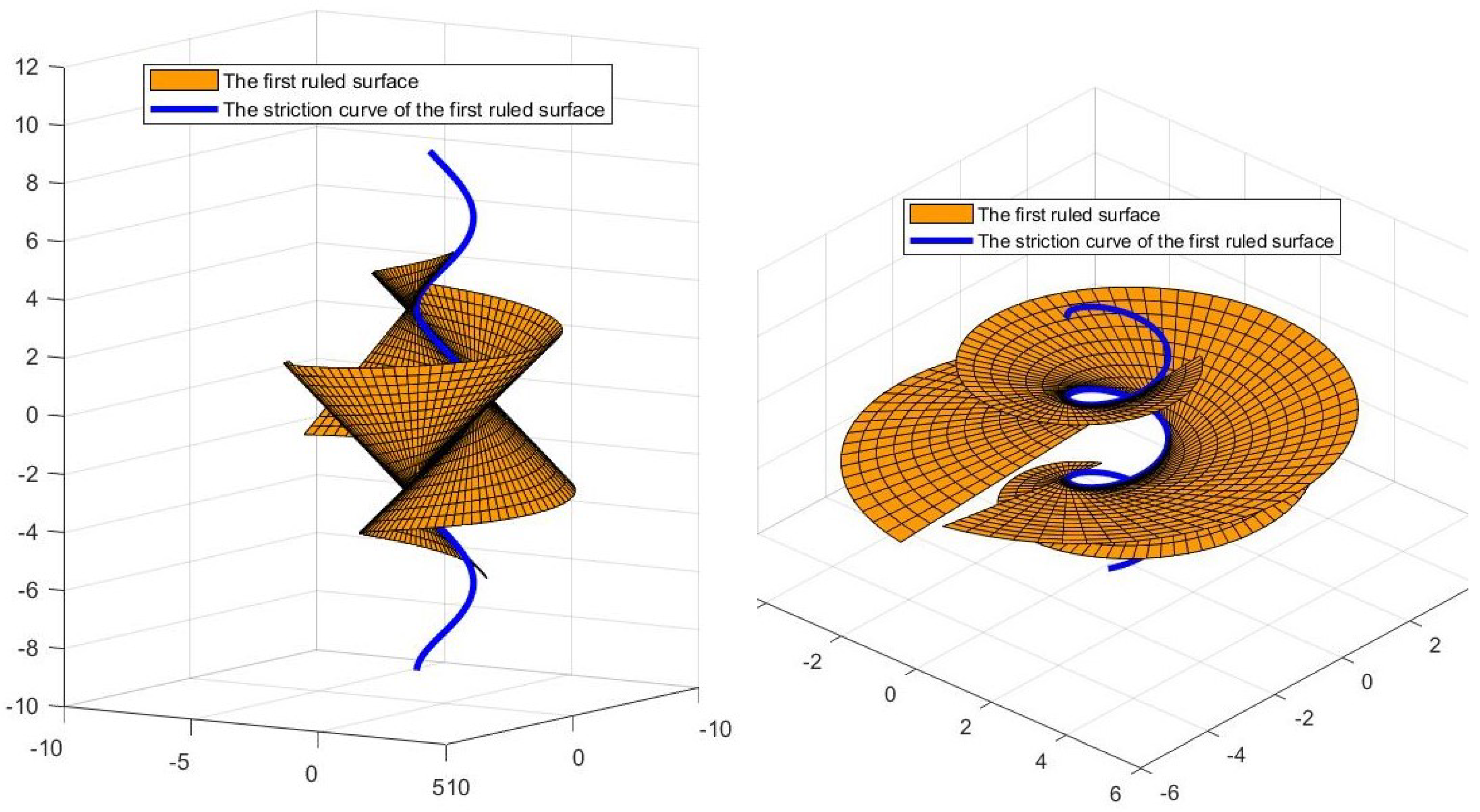
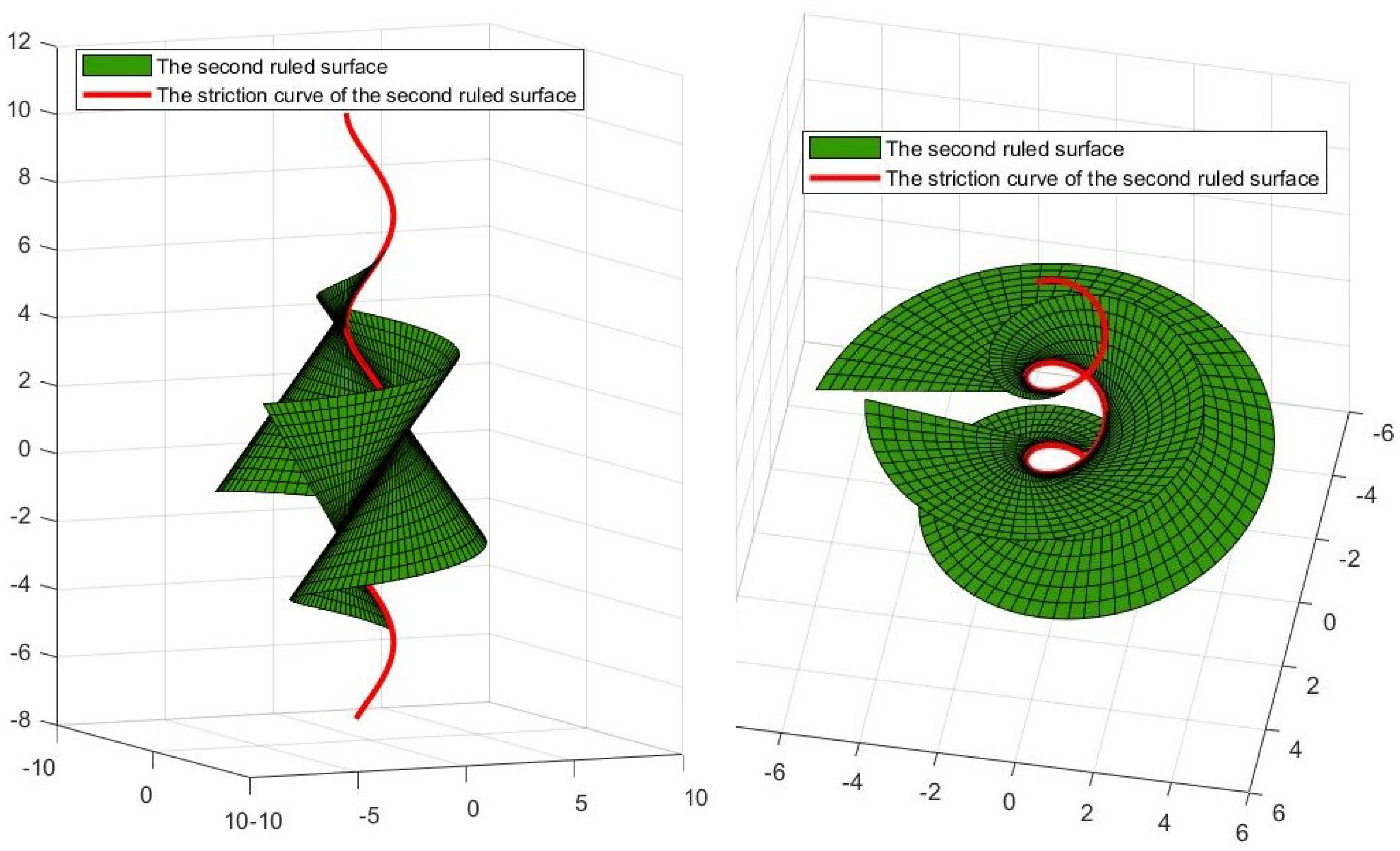
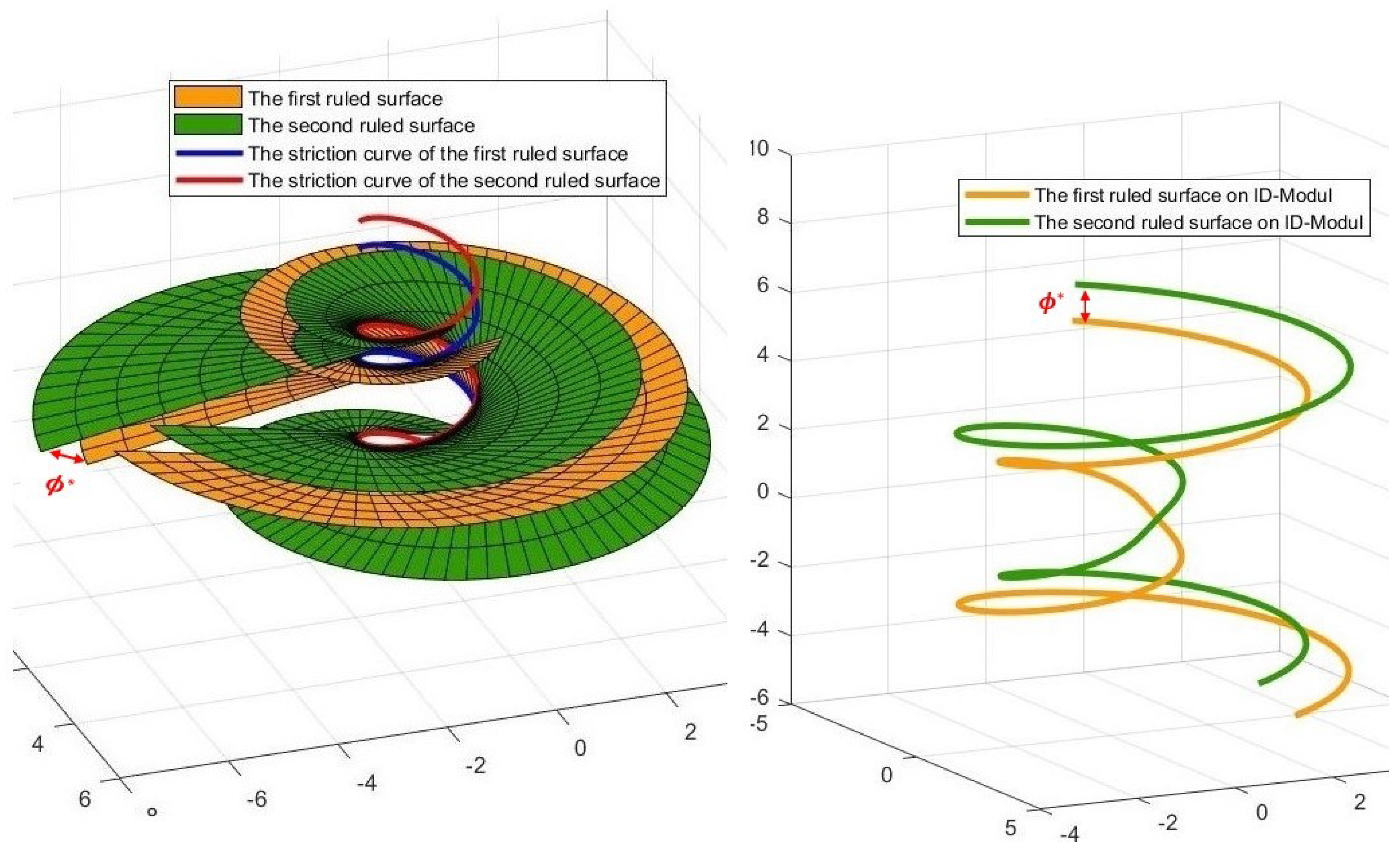
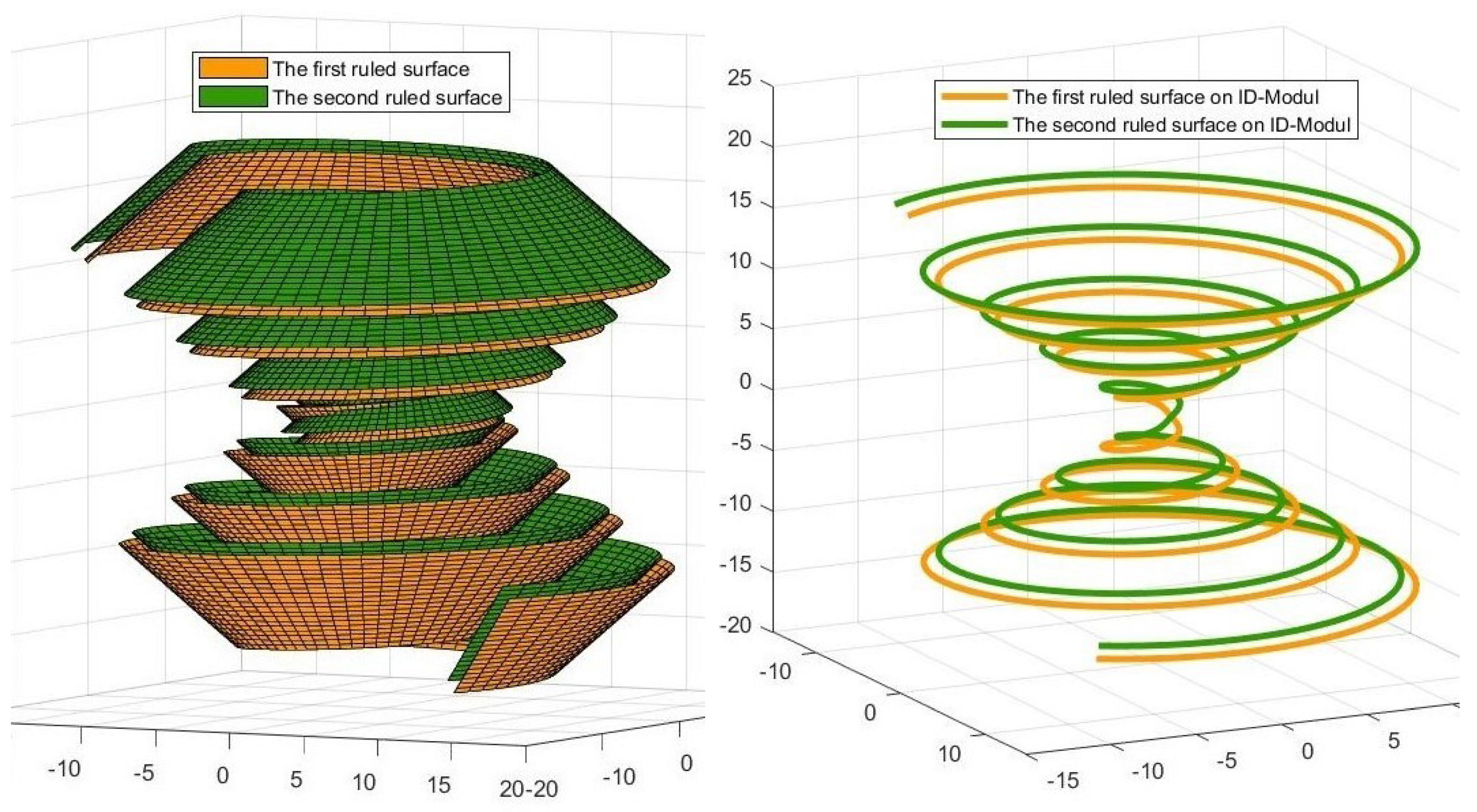
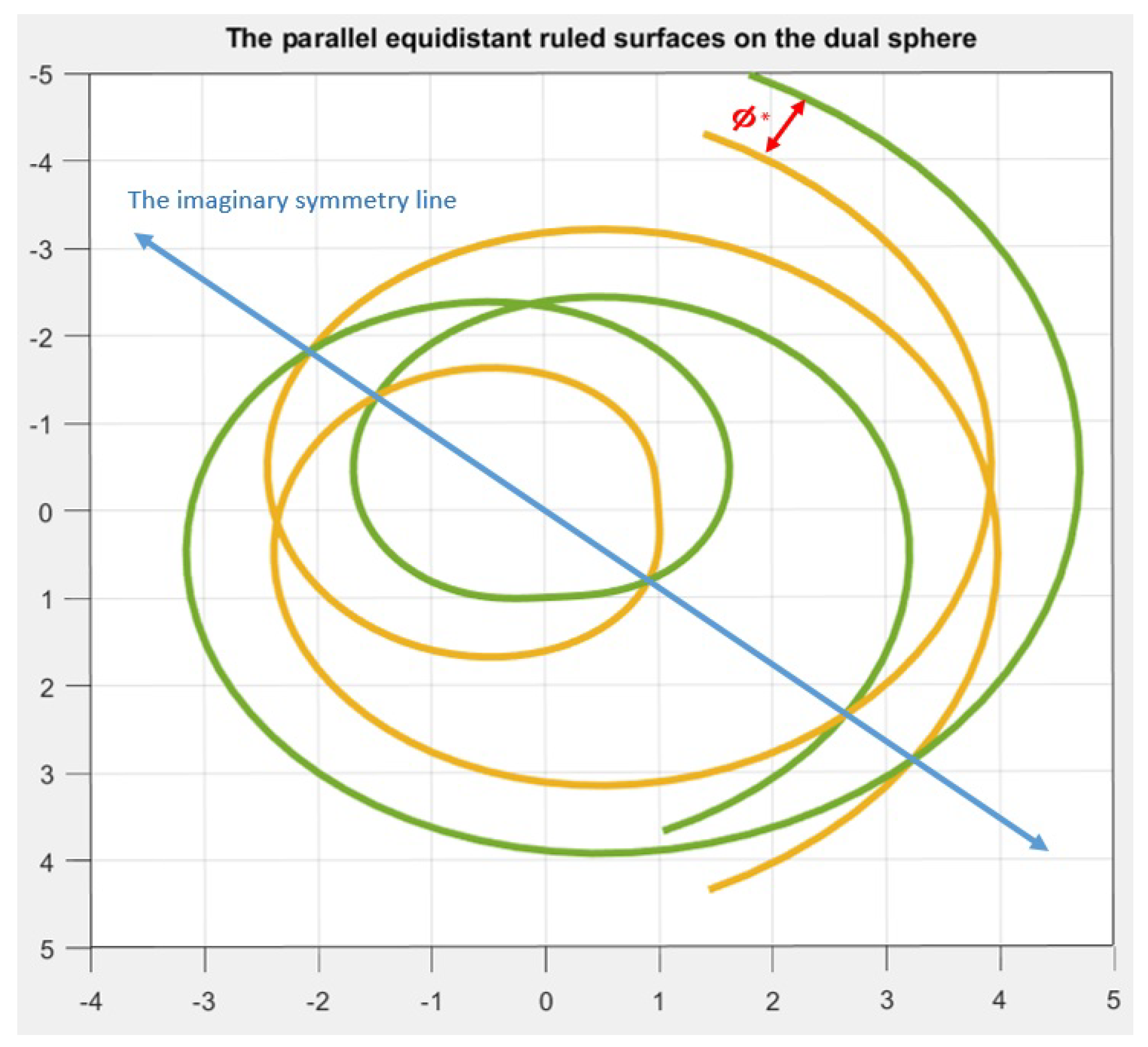
3.4. An Example For DPERS
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DPERS | Dual Parallel Equidistant Ruled Surfaces |
References
- Study, E. Geometrie der Dynamen; Verlag Teubner: Leipzig, Germany, 1903. [Google Scholar]
- Clifford, W.K. Preliminary sketch of biquaternions. Proc. Lond. Math. Soc. 1873, 1, 381–395. [Google Scholar] [CrossRef]
- Biran, L. Differential Geometry Courses; AR-Publications: Istanbul, Turkey, 1981; pp. 81–88. [Google Scholar]
- Blaschke, W. Differential Geometry Courses; Istanbul University Publications: Istanbul, Turkey, 1949; pp. 332–345. [Google Scholar]
- Hacisalihoglu, H.H. The Motion Geometry and Quaternions Theory; Gazi University, Faculty of Science and Literature Publications: Ankara, Turkey, 1983; pp. 3–55. [Google Scholar]
- Hacisalioglu, H.H. Differential Geometry-II; Ankara University, Faculty of Science Publications: Ankara, Turkey, 1994; pp. 203–286. [Google Scholar]
- Hagemann, M.; Klawitter, D.; Lordick, D. Force Driven Ruled Surfaces. J. Geom. Graph. 2013, 17, 193–204. [Google Scholar]
- Muller, H.R. Kinematics Courses; Ankara University Press: Ankara, Turkey, 1963; pp. 240–251. [Google Scholar]
- Ozdemir, M. Quaternions and Geometry; Altin Nokta Press: İzmir, Turkey, 2020; pp. 150–182. [Google Scholar]
- Sabuncuoglu, A. Differential Geometry; Nobel Press: Ankara, Turkey, 2006. [Google Scholar]
- Senatalar, M. Differential Geometry (Curves and Surfaces Theory); Istanbul State Engineering and Architecture Academy Publications: Istanbul, Turkey, 1978; pp. 153–170. [Google Scholar]
- Ali, A.T.; Abdel Aziz, H.S.; Sorour, A.H. Ruled surfaces generated by some special curves in Euclidean 3-Space. J. Egypt. Math. Soc. 2013, 21, 285–294. [Google Scholar] [CrossRef] [Green Version]
- Bilici, M. On the Invariants of Ruled Surfaces Generated by the Dual Involute Frenet Trihedron. Commun. Fac. Sci. Univ. Ank. Ser. A1 Math. Stat. 2017, 66, 62–70. [Google Scholar]
- Oral, S.; Kazaz, M. Characterizations for Slant Ruled Surfaces in Dual Space. Iran. J. Sci. Technol. Trans. A Sci. 2017, 41, 191–197. [Google Scholar] [CrossRef]
- Saracoglu, S.; Yayli, Y. Ruled Surfaces and Dual Spherical Curves. Acta Univ. Apulensis 2012, 20, 337–354. [Google Scholar]
- Yayli, Y.; Saracoglu, S. Different Approaches to Ruled Surfaces. Univ. SüLeyman Demirel J. Sci. 2012, 7, 56–68. [Google Scholar]
- Schaaf, A.; Ravani, B. Geometric Continuity of Ruled Surfaces. Comput. Aided Geom. Des. 1998, 15, 289–310. [Google Scholar] [CrossRef]
- Bektas, Ö.; Senyurt, S. On Some Characterizations of Ruled Surface of a Closed Timelike Curve in Dual Lorentzian Space. Adv. Appl. Clifford Algebr. 2012, 22, 939–953. [Google Scholar] [CrossRef] [Green Version]
- Gursoy, O. The dual angle of the closed ruled surfaces. Mech. Mach. Theory 1990, 25, 131–140. [Google Scholar] [CrossRef]
- Hacisalihoglu, H.H. Acceleration Axes in Spatian Kinematics I. Commun. Fac. Sci. Univ. Ank. Ser. Math. Stat. 1971, 20, 1–15. [Google Scholar]
- Hacisalihoglu, H.H. On the pitch of a closed ruled surfaces. Mech. Mach. Theory 1972, 7, 291–305. [Google Scholar] [CrossRef]
- Valeontis, I. Parallel P-Äquidistante Regelflachen Manuscripta. Mathematics 1986, 54, 391–404. [Google Scholar]
- Masal, M.; Kuruoglu, N. Some Characteristic Properties of the Parallel P-Equidistant Ruled Surfaces in The Euclidean Space. Pure Appl. Math. Sci. 1999, 50, 35–42. [Google Scholar]
- Masal, M.; Kuruoglu, N. Some Characteristic Properties of the Shape Operators of Parallel p-Equidistant Ruled Surfaces. Bull. Pure Appl. Sci. 2000, 19, 361–364. [Google Scholar]
- Masal, M.; Kuruoglu, N. Spacelike parallel pi-equidistant ruled surfaces in the Minkowski 3-space R13. Algebr. Groups Geom. 2005, 22, 13–24. [Google Scholar]
- Senyurt, S.; Gur Mazlum, S.; Grilli, G. Gaussian curvatures of parallel ruled surfaces. Appl. Math. Sci. 2020, 14, 171–183. [Google Scholar] [CrossRef]
- As, E.; Senyurt, S. Some Characteristic Properties of Parallel z-Equidistant Ruled Surfaces. Hindawi Publ. Corp. Math. Probl. Eng. 2013, 2013, 587289. [Google Scholar]
- Fenchel, W. On the Differential Geometry of Closed Space Curves. Bull. Am. Math. Soc. 1951, 57, 44–54. [Google Scholar] [CrossRef] [Green Version]
- Sarioglugil, A.; Senyurt, S.; Kuruoglu, N. On the Integral Invariants of the Closed Ruled Surfaces Generated by a Parallel p-Equidistant Dual Centroit Curve in the Line Space. Hadron. J. 2011, 34, 34–47. [Google Scholar]
- Senyurt, S. Integral Invariants of Parallel P-Equidistant Ruled Surfaces Which Are Generated by Instantaneous Pfaff Vector. Ordu Univ. Sci. Tech. J. 2012, 2, 13–22. [Google Scholar]
- Chittawadigi, R.G.; Hayat, A.A.; Saha, S.K. Geometric model identification of a serial robot. In Proceedings of the International Symposium on Robotics and Mechatronics, Singapore, 2–5 October 2013. [Google Scholar]
- Saglamer, E. Kinematically Modelling and Solution of Motion Coordination of Multi Robots with Quaternions. Master’s Thesis, Istanbul Technical University Institute of Sciences, Istanbul, Turkey, 2008. [Google Scholar]
- Sahiner, B.; Kazaz, M.; Ugurlu, H.H. A Dual Method to Study Motion of a Robot End-Effector. J. Inform. Math. Sci. 2018, 10, 247–259. [Google Scholar] [CrossRef]
- Li, Y.L.; Dey, S.; Pahan, S.; Ali, A. Geometry of conformal η-Ricci solitons and conformal η-Ricci almost solitons on Paracontact geometry. Open Math. 2022, 20, 1–20. [Google Scholar] [CrossRef]
- Li, Y.L.; Zhu, Y.S.; Sun, Q.Y. Singularities and dualities of pedal curves in pseudo-hyperbolic and de Sitter space. Int. J. Geom. Methods Mod. Phys. 2021, 18, 1–31. [Google Scholar] [CrossRef]
- Li, Y.L.; Lone, M.A.; Wani, U.A. Biharmonic submanifolds of Kähler product manifolds. AIMS Math. 2021, 6, 9309–9321. [Google Scholar] [CrossRef]
- Li, Y.L.; Alkhaldi, A.H.; Ali, A.; Laurian-Ioan, P. On the Topology of Warped Product Pointwise Semi-Slant Submanifolds with Positive Curvature. Mathematics 2021, 9, 3156. [Google Scholar] [CrossRef]
- Li, Y.L.; Ali, A.; Mofarreh, F.; Alluhaibi, N. Homology groups in warped product submanifolds in hyperbolic spaces. J. Math. 2021, 2021, 8554738. [Google Scholar] [CrossRef]
- Li, Y.L.; Ali, A.; Ali, R. A general inequality for CR-warped products in generalized Sasakian space form and its applications. Adv. Math. Phys. 2021, 2021, 5777554. [Google Scholar] [CrossRef]
- Li, Y.L.; Ali, A.; Mofarreh, F.; Abolarinwa, A.; Ali, R. Some eigenvalues estimate for the ϕ-Laplace operator on slant submanifolds of Sasakian space forms. J. Funct. Space 2021, 2021, 6195939. [Google Scholar]
- Li, Y.L.; Abolarinwa, A.; Azami, S.; Ali, A. Yamabe constant evolution and monotonicity along the conformal Ricci flow. AIMS Math. 2022, 7, 12077–12090. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gür Mazlum, S.; Şenyurt, S.; Grilli, L. The Dual Expression of Parallel Equidistant Ruled Surfaces in Euclidean 3-Space. Symmetry 2022, 14, 1062. https://doi.org/10.3390/sym14051062
Gür Mazlum S, Şenyurt S, Grilli L. The Dual Expression of Parallel Equidistant Ruled Surfaces in Euclidean 3-Space. Symmetry. 2022; 14(5):1062. https://doi.org/10.3390/sym14051062
Chicago/Turabian StyleGür Mazlum, Sümeyye, Süleyman Şenyurt, and Luca Grilli. 2022. "The Dual Expression of Parallel Equidistant Ruled Surfaces in Euclidean 3-Space" Symmetry 14, no. 5: 1062. https://doi.org/10.3390/sym14051062
APA StyleGür Mazlum, S., Şenyurt, S., & Grilli, L. (2022). The Dual Expression of Parallel Equidistant Ruled Surfaces in Euclidean 3-Space. Symmetry, 14(5), 1062. https://doi.org/10.3390/sym14051062