1. Introduction
Approximating fixed points for different kinds of mappings is an important tool to solve many problems in the theory of nonlinear analysis. In this view, Picard iteration is an important starting point for the development of other new iterative schemes. However, Picard iteration does not converge to a fixed point for a large class of mappings, for example, the class of nonexpansive mappings. This was proved by Krasnoselskii [
1]. Let
K be a nonempty subset of a Banach space
X. The map
F:
K →
K is nonexpansive if
for all
. In 1967, Browder [
2] introduced the iterative process to fixed points of nonexpansive self maps on closed and convex subsets of a Hilbert space. Mann [
3] constructed the iterative process to approximate the fixed points of a nonexpansive mapping, it is defined by the following method: for a starting point
where
is a sequence in
Later, the Ishikawa [
4] iteration is a two step iterative process that helps to approximate fixed points of nonexpansive mappings; for a starting point
this iterative scheme is defined by:
where
and
are sequences in
Agarwal et al. [
5] introduced a two step iterative process in 2007: for an arbitrary
define:
where
and
are sequences in
In 2000, Noor [
6] introduced the following iteration scheme: starting with
define
iteratively by:
where
and
are sequences in
In the sequel, we will consider the following iterative process defined by Thakur et al. in [
7]: for an arbitrary chosen element
the sequence
is generated by:
where
and
are sequences in
satisfying one of the following conditions:
- (Q)
and as ,
- (R)
Recently, Anthony Eldred et al. [
8] approximated fixed points in uniformly convex Banach space using the Mann iterative process
where
to a relatively nonexpansive map of the type
which satisfies
and
and
One can note that relatively nonexpansive mappings need not be continuous in general. Gopi et al. [
9] also approximated the common fixed point via Ishikawa iterative process. Pragadeeswarar et al. [
10] approximated the common best proximity point for a pair of mean nonexpansive mappings. In 2020, Gabeleh et al. [
11] introduced a geometric notion of proximal Opial’s condition on a nonempty, closed and convex pair of subsets of strictly convex Banach spaces and proved the strong and weak convergence of the Ishikawa iterative scheme for noncyclic relatively nonexpansive mappings in uniformly convex Banach spaces.
In 2019, Gabriela et al. [
12] proved the convergence of Thakur et al.’s iteration method for Suzuki-type nonexpansive mappings. This class of mappings properly contains the class of nonexpansive mappings. At this moment, it is natural to think that one can approximate a fixed point for relatively nonexpansive mappings using the Thakur iterative process.
Motivated by the work of Gabeleh et al. and Gabriela et al., we approximate a fixed point for noncyclic relatively nonexpansive mappings in uniformly convex Banach space through the Thakur iterative process. We also provide a strong convergence result of the Thakur iterative process and we compare the Thakur iterative process to some well known iterations. Finally, we propose a numerical example to show that the Thakur iterative process converges more effectively than the Picard iterative process, Mann iterative process and Ishikawa iterative process.
2. Preliminaries
Let
M and
N be nonempty subsets of a Banach space
X. The following notations are used subsequently:
If M is a convex, closed subset of a reflexive and strictly convex space, then contains one element and if M and N are convex, closed subsets of a reflexive space, with either M or N being bounded, then It can be pointed out that the relevance of the subsequent study to symmetry is obvious since distances between points and between sets are symmetry. For instance, in the above equations, is a symmetry property for the distance between the sets M and N.
The following definitions and theorems are very useful to our results:
Definition 1. Let M and N be nonempty subsets of a metric space . An element is said to be a best proximity point of the nonself-mapping if it satisfies the condition that: Definition 2. Let M and N be nonempty subsets of a Banach space X. A mapping is relatively nonexpansive if: Theorem 1 ([
13])
. Let M and N be nonempty closed bounded convex subsets of a uniformly convex Banach space. Let satisfy:- 1.
and and
- 2.
for
Then there exist such that
Theorem 2 ([
13])
. Let M and N be nonempty closed bounded convex subsets of a uniformly convex Banach space. Let satisfy:- 1.
and and
- 2.
for
Then there exist and such that and
Theorem 3 ([
14])
. Let X be a uniformly convex Banach space, and F be a nonexpansive mapping of the closed convex bounded subset K of X into K. Then F has a fixed point in K. Proposition 1 ([
15])
. If X is a uniformly convex space and and then for any if are such that then there exists such that Definition 3 ([
16])
. Let C be a nonempty subset of a Banach space X and T be a selfmap on C. T is said to satisfy condition if whenever for all . Such mappings are often called generalized nonexpansive mappings or Suzuki mappings. Theorem 4 ([
12])
. Let C be a nonempty, closed and convex subset of a uniformly convex Banach space , and let be a mapping satisfying condition (C). For an arbitrarily chosen , let the sequence be generated by (1) for all where bounded away from 0 and 1. Then if and only if is bounded and . Theorem 5 ([
12])
. Let C be a nonempty, compact and convex subset of a uniformly convex Banach space X and let T and be as in Theorem 4. Then converges strongly to a fixed point of . Let M be a convex closed subset of a Hilbert Space X. Then for we know that is the nearest to w and unique point of M. is nonexpansive and distinguished by the Kolmogorov’s criterion:
Let
M and
N be two convex closed subsets of
Define:
Then,
and
When
M and
N are closed, the convergence of these sequences in norm were proved by von Neumann [
17]. The sequences
and
are called von Neumann sequences or the alternating projection algorithm for two sets.
Theorem 6 ([
8])
. Let M and N be nonempty bounded closed convex subsets of a uniformly convex Banach space and suppose that satisfies:- 1.
and and
- 2.
for
Let and define where and Then Moreover, if lies in a compact set, then converges to a fixed point of F.
Definition 4 ([
18])
. Let M and N be nonempty closed convex subsets of a Hilbert space X. We say that is boundedly regular if for each bounded subset S of X and for each there exists such that:where is the displacement vector from M to N. is the unique vector satisfying . Theorem 7 ([
18])
. If is boundedly regular, then the von Neumann sequences converges in norm. Theorem 8 ([
18])
. If M or N is boundedly compact, then is boundedly regular. Lemma 1 ([
19])
. Let M be a nonempty closed and convex subset and N be a nonempty closed subset of a uniformly convex Banach space. Let and be sequences in M and be a sequence in N satisfying:- 1.
- 2.
Then converges to zero.
Corollary 1 ([
19])
. Let M be a nonempty closed convex subset and N be a nonempty closed subset of uniformly convex Banach space. Let be a sequence in M and such that Then converges to Proposition 2 ([
13])
. Let M and N be two closed and convex subsets of a Hilbert space X. Then , and for and . Lemma 2 ([
8])
. Let M and N be two closed and convex subsets of a Hilbert space X. For each Lemma 3 ([
20])
. Let be a nonempty, bounded, closed and convex pair in a reflexive and strictly convex Banach space X. Define as:Then the following statements hold.
- 1.
for any and
- 2.
is an isometry, that is, for all
- 3.
is affine.
Definition 5 ([
21])
. If then the pair is said to have P-property if for any and Lemma 4 ([
22])
. Every, nonempty, bounded, closed and convex pair in a uniformly convex Banach space X has the P-property. Lemma 5 ([
23])
. Let be a nonempty, closed and convex pair in a uniformly convex Banach space . Then for the projection mapping defined in (7) we have both and are continuous. For more results on approximation for fixed points, one can refer [24,25,26,27,28,29,30,31,32]. 3. Main Results
Theorem 9. Let M and N be nonempty bounded closed convex subsets of a uniformly convex Banach space and suppose that satisfies:
- 1.
and and
- 2.
for
For an arbitrary chosen let the sequence be generated by (5) where where and Suppose then . Moreover, if lies in a compact set then converges to a fixed point of F. Proof. If
then
and by Theorems 4 and 5 we can prove the result from the truth that
is nonexpansive. Therefore let us take that
By Theorem 2, there exists
such that
Now, from (
5), we have:
In the same way, we can obtain:
Now, using inequality (
8), one gets:
Therefore, by (
8) and (
9), we obtain:
This implies that the sequence is non increasing. Then we can find such that
Suppose there exists a subsequence of and an such that for all k.
Since the modulus of convexity of of X is continuous and increasing function we choose as small that where
Now we choose
k, such that
Now we have:
Now, by Proposition 1, we can obtain:
Additionally, using (
11), we get:
Therefore, the Equation (
10) becomes:
Since there exists
such that
Suppose that we choose very small , we have , which is a contradiction. This implies that Since is contained in a compact set, has a subsequence that converges to a point Also converges to a. Since there exists such that Therefore, which gives that
Let and choose such that .
We have , and . So . By strict convexity of the norm, . It follows that .
Let
. Then we have
Therefore,
. By Lemma 4, we get
. In particular,
. So
Since
, we can obtain that
exists. Therefore,
This implies □
Corollary 2. Let M and N be nonempty bounded closed convex subsets of a uniformly convex Banach space and suppose that satisfies:
- 1.
and and
- 2.
for
For an arbitrary chosen let the sequence be generated by (5), where where and then Moreover, if lies in a compact set then converges to a fixed point of F. Corollary 3. Let M and N be nonempty bounded closed convex subsets of a Hilbert space and let F be as in Theorem 2. Let and define where where and then . Moreover, if is mapped into a compact subset of N then converges to a fixed point of F.
Proof. One can note that . By Theorem 9, the result follows. □
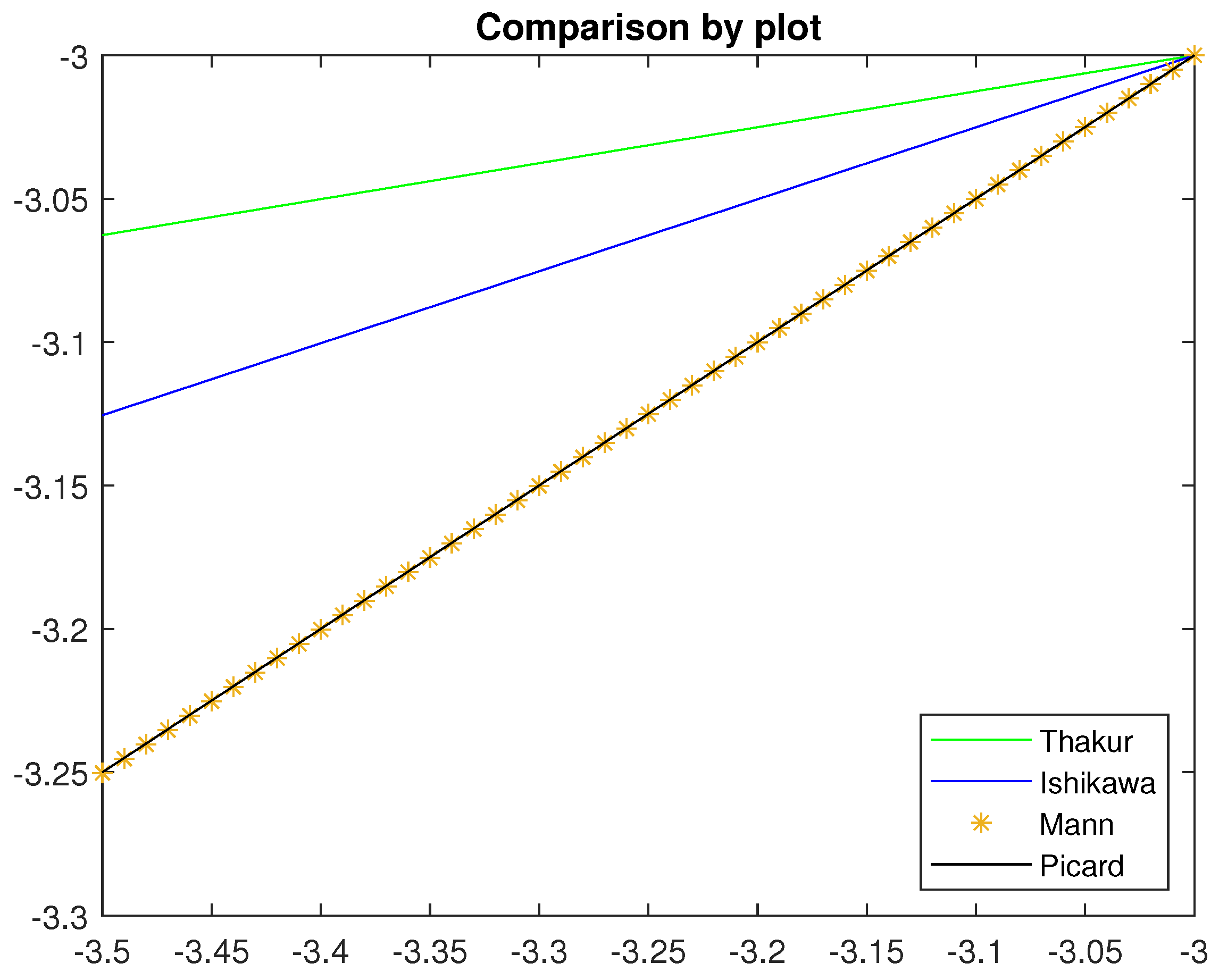
Example 1. Let . Then, Hence F is a relatively nonexpansive mapping.
Let . First the Thakur et al. iteration method becomes with :and For the Ishikawa iteration, set with . We have . Then, In Picard iteration we have , and Mann with or Krasnoselskij iteration, we have: Using Matlab coding we give the comparison table for approaching a fixed point in these four iteration processes.
The Table 1 shows that the Thakur iteration attains the fixed point at the fifteenth iterative step. However, the other iterations take more than fifteen iterative steps to reach the fixed point. This reveals that the Thakur iteration is faster than the other iterative processes. The
Figure 1 shows a comparison of Thakur et al.’s iteration method with Picard, Mann and Ishikawa iterations by using the continuous data points from −3.5 to −3.
Now we relax the assumptions on constants and in the above theorem and we prove the following theorem by using the conditions (Q) or (R) on constants and
Lemma 6 ([
11])
. A Banach space X is uniformly convex if and only if for each fixed number there exists a continuous strictly increasing function iff such thatfor all and all such that and Lemma 7 ([
11])
. Consider a strictly increasing function with If a sequence in satisfies then Lemma 8 ([
11])
. Let be a nonempty and closed pair in a uniformly convex Banach space X such that A is convex. Let and be sequences in A and be a sequence in B such that and then we have Theorem 10. Let M and N be nonempty bounded closed convex subsets of a uniformly convex Banach space and suppose that satisfies:
- 1.
and and
- 2.
for
For an arbitrarily chosen let the sequence be generated by (5) where satisfy either (Q) or (R) and Then Moreover, if lies in a compact set then converges to a fixed point of F. Proof. By Theorem 2, we can find
such that
. Then from Lemma 6 there exists a continuous strictly increasing function
such that:
Therefore, we can deduce the following inequalities:
Now, we proceed the following two cases:
- Case 1:
Suppose that
and
satisfy (Q). From (
12), we get
As
, we get
Since
implies
so
Since
is affine and isometry and
on
Therefore, the inequality reduces to
Letting
we obtain
Therefore, by Lemma 8, it is implied that
- Case 2:
Suppose that
and
satisfy (R). From (
13), we get
As , we get In view of the fact that , it implies so
Therefore,
in both the cases. Now, since
lies in a compact subset then
has a convergent subsequence
, converging to some point
. We also have
Additionally, from
we have
So one can obtain, by Lemma 8,
By uniqueness of limit,
So
Therefore, we get that
exists. So
which gives
□
In the next result, we provide a stronger version to iterate the fixed point via von Neumann sequences.
Theorem 11. Let M and N be nonempty bounded closed convex subsets of a Hilbert space and suppose that satisfies
- 1.
and and
- 2.
for
Let and define where where and , then Moreover, if lies in a compact set and then converges to a fixed point of F.
Proof. If
then
and
is nonexpansive with
the usual Thakur et al. iteration method. So let us take that
By Theorem 2, we can find
such that
Now, by (
8) and (
9), we obtain:
This implies that the sequence is non increasing. Then we can find such that
Suppose there exists a subsequence of and an such that
for all k.
Since the modulus of convexity of of X is a continuous and increasing function we choose to be small such that where
Now we choose
k, such that
Now we have:
Additionally, using (
16), we get:
Therefore, the Equation (
15) becomes:
Since there exists
such that
Suppose that we choose very small , we have , which is a contradiction. This implies that Now we prove that From the Thakur et al. iteration method, we get Since we obtain
Since
is contained in a compact set,
has a subsequence
that converges to a point
also converges to
. From the given sequence, we obtain:
Since implies Then Therefore, which implies that We also have as
Now, , which gives that Therefore, .
Additionally, So .
Now, . Thus .
For any
and
By Theorem 7, for each
the sequence
converges to some
Now,
So . Therefore, and similarly
Now we define
by
. Since
we conclude that
u is continuous. Therefore,
is continuous and converges pointwise to zero. Since
by Lemma 2, we obtain
Therefore
converges uniformly on the compact set
Therefore
Since
we get
which gives that
Therefore , which completes the proof. □
Suppose X is a Hilbert space and let F be as in Theorem 1. Consider and . From Proposition 2, for and by Theorems 9 and 11 we give the following results on convergence of best proximity points.
Corollary 4. Let M and N be nonempty, closed, bounded and convex subsets of a Hilbert space X. Let F be as in Theorem 1. If M is mapped into a compact subset of N, then for any the sequence defined by where converges to w in such that
Corollary 5. Let M and N be nonempty, closed, bounded and convex subsets of a Hilbert space X. Let F be as in Theorem 1. If M is mapped into a compact subset of N, then for any the sequence is defined by where converges to w in such that provided
Corollary 6. Let M and N be nonempty, closed, bounded and convex subsets of a Hilbert space X. Let F be as in Theorem 1. If M is mapped into a compact subset of N, then for any the sequence is defined by where converges to w in such that
Proof. The result follows from Corollary 4. □
Corollary 7. Let M and N be nonempty, closed, bounded and convex subsets of a Hilbert space X. Let F be as in Theorem 1. Let and define where where and . If M is mapped into a compact subset of N and , then converges to w in such that
Proof. The result follows from Theorem 11. □






{kind=link}