
Uncertainty Theory-Based Resilience Analysis for LEO Satellite Communication Systems


Abstract
:1. Introduction
- Generally, there are two types of uncertainties, aleatory and epistemic. Epistemic uncertainties can be reduced by collecting more data or refining models, and aleatory ones are natural randomness that cannot be reduced [10]. As a typical newly developing system, the LEO-SCS suffers from performance data insufficiency and performance data asymmetry [11], which limits knowledge on recognizing system performance and leads to epistemic uncertainty. Considering the aleatory uncertainty of the satellite failures [12] and the epistemic uncertainty of the system performance, the resilience of an LEO-SCS needs to be analyzed with both uncertainties. However, existing resilience assessment methods only individually focus on either aleatory uncertainty or epistemic uncertainty [3,4,5,13], which will lead to inaccurate resilience assessment. In addition, the performance measures used in these resilience assessments vary widely and a unified measure is required for the resilience comparison among different systems.
- To measure LEO-SCS resilience requires a system model to be built. Previous LEO-SCS modeling methods have only considered the dynamics of the network topology and the aleatory uncertainty of the performance parameters while neglecting their epistemic uncertainty.
- An uncertain satellite network evolution model is proposed for the LEO-SCS, which quantifies both the end-to-end aleatory and epistemic uncertainties and also considers dynamic topology changes;
- A resilience evaluation method is proposed for the LEO-SCS, under which system resilience under different backup strategies can be compared and the results can be used in design decisions.
2. Preliminaries
2.1. Uncertain Measure
2.2. Chance Measure
3. Belief Resilience Measure
3.1. Belief Instantaneous Availability
3.2. Belief Resilience
4. LEO-SCS and Its Uncertain Evolution Model
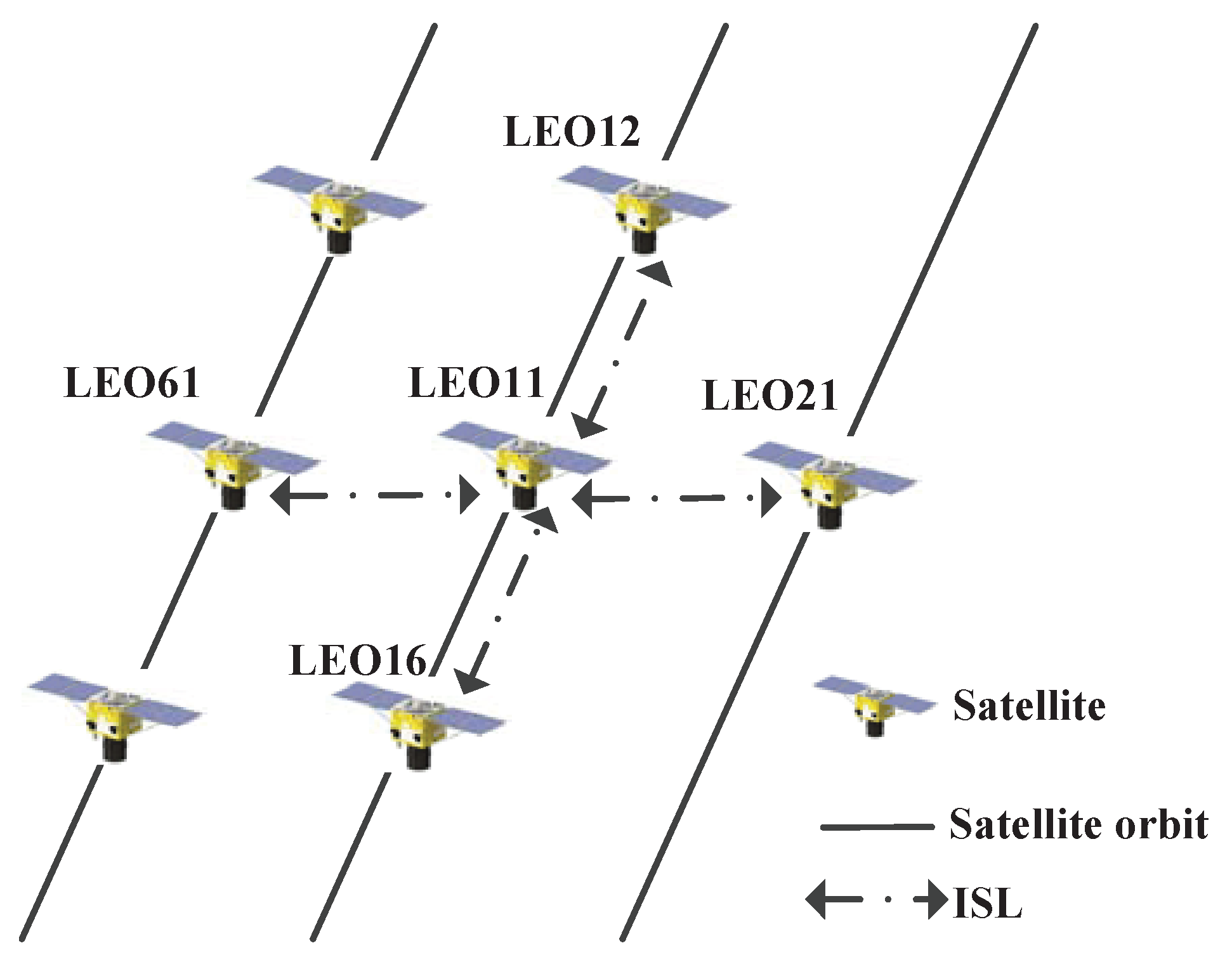
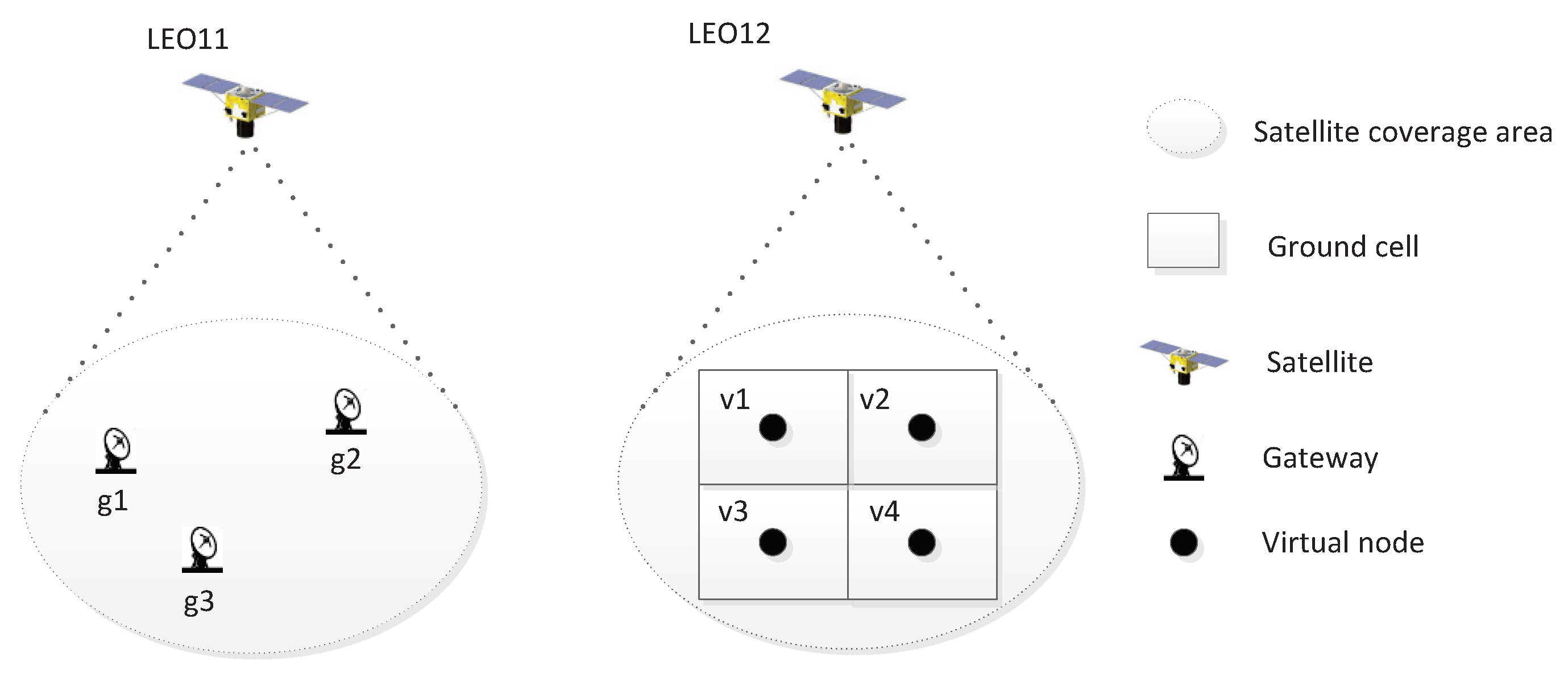
4.1. A Short Introduction to LEO-SCS
- Between user terminals: user terminals can connect directly with an LEO satellite, and the messages are transmitted through one or more LEO satellites from the source to the destination;
- Between user terminal and terrestrial users: a terrestrial user can only connect with its gateway; the gateway and user terminal transfer messages through one or more LEO satellites.
4.2. Uncertain Satellite Network Evolution Model
4.2.1. Assumptions
- User terminals and gateways are perfect, and only satellite failures, which are affected by aleatory uncertainty [12], are considered, as maintenance is not easy in space;
- Processing delays of an LEO-SCS follow regular uncertainty distributions.
4.2.2. Uncertain Satellite Network Evolution Modeling Method
4.2.3. Dynamic Uncertain Satellite Network Model
4.2.4. Evolution Rule of Dynamic Uncertain Satellite Network Model
- (1)
- Evolution timing
- Node exit time depends on the satellite failure time;
- (2)
- Evolution algorithm
| Algorithm 1 Evolution algorithm |
|
5. Resilience Evaluation for the LEO-SCS
5.1. End-to-End Delay Calculation
5.2. Belief Instantaneous Availability Calculation
5.3. Resilience Evaluation
- Gather the information of applications on the system, including traffic volume , source node, destination node, and delay threshold ;
- Use the uncertain satellite network evolution model in Section 4.2 and the delay bounded routing algorithm in Section 5.1 to simulate the end-to-end delay of each application for every time interval under a specific disruption (i.e., with satellite failure) and in a normal state (i.e., without satellite failure);
- Repeat steps (2) and (3) N times, and calculate that there are behaviors after a disruption that are greater than . The belief resilience of the LEO-SCS is
6. Case Study
6.1. Overview
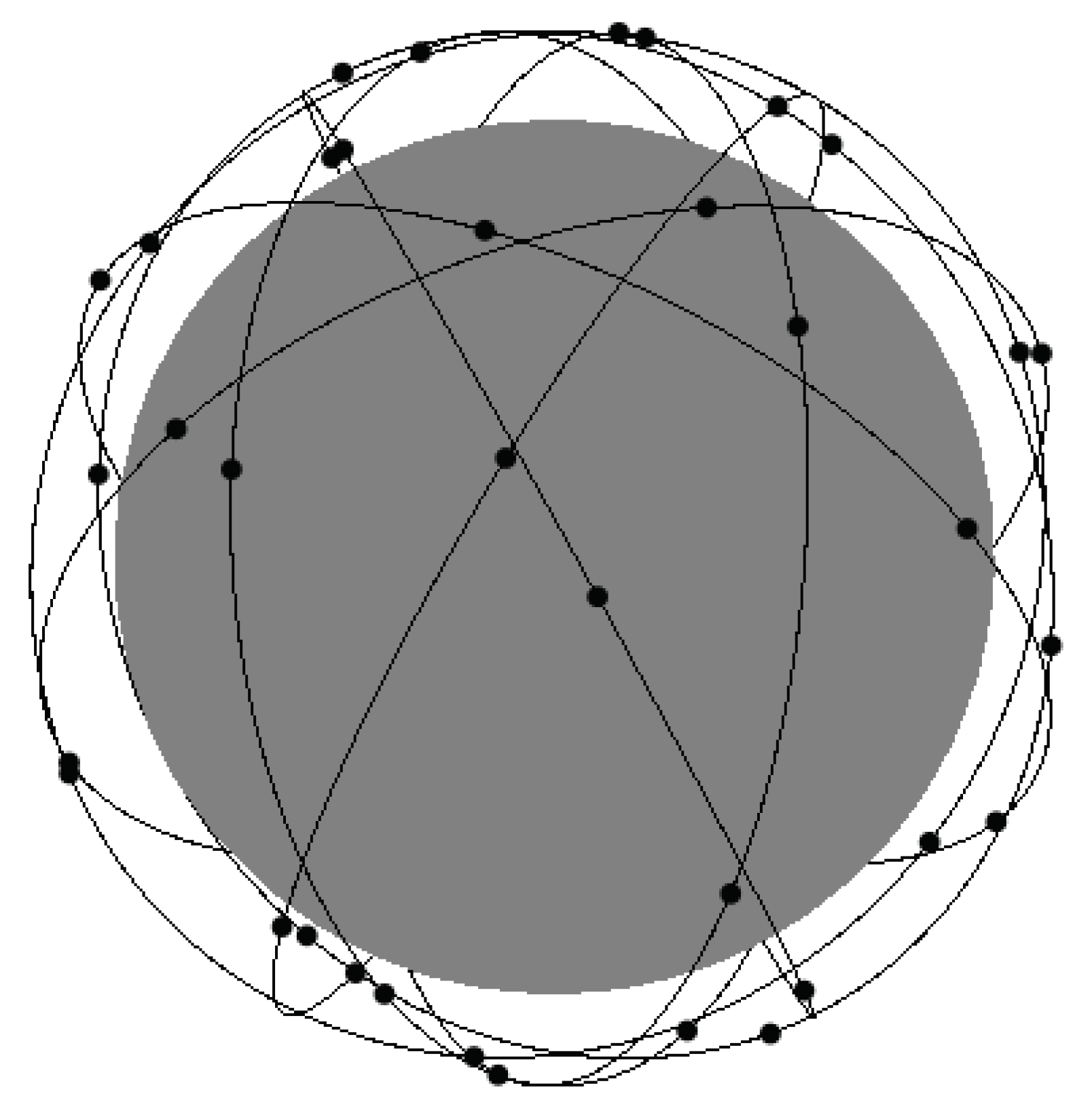
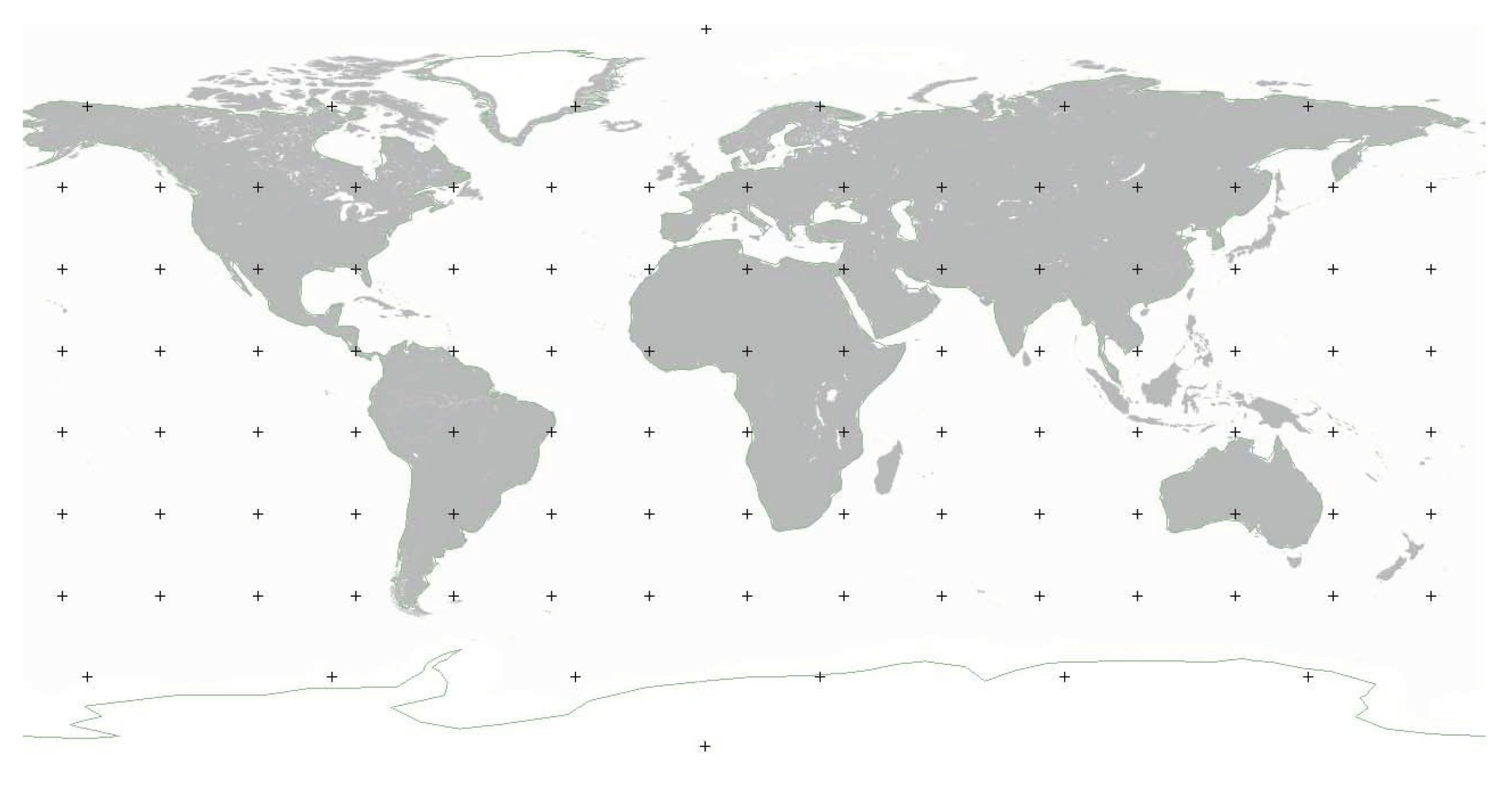
6.1.1. Topology
6.1.2. Application
6.1.3. Failure and Recovery
- In-orbit backup strategy: each operating orbit has a backup orbit that locates directly below at a height of 1000 km, and one backup satellite is deployed in each backup orbit;
- Ground backup strategy: each launch can carry one backup satellite to supplement the in-orbit backup, and the ground transfer time obeys a uniform distribution, days.
6.2. Resilience Analysis and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schrogl, K.U. Handbook of Space Security: Policies, Applications and Programs; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- DOD. FACT SHEET: Resilience of Space Capabilities; Technical Report; Department of Defence: Canberra, ACT, Australia, 2011. [Google Scholar]
- Turner, J.S. A Methodology for Measuring Resilience in a Satellite-Based Communication Network. Master’s Thesis, Air University, Montgomery, AL, USA, 2014. [Google Scholar]
- Han, J.; Zhang, Y.S.; Tang, Y.F.; Tong, Z. A method of communication constellation resilience evaluation. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 608. [Google Scholar]
- Lowe, C.J.; Macdonald, M. Space mission resilience with inter-satellite networking. Reliab. Eng. Syst. Saf. 2020, 193, 106608. [Google Scholar] [CrossRef]
- Reed, D.A.; Kapur, K.C.; Christie, R.D. Methodology for assessing the resilience of networked infrastructure. IEEE Syst. J. 2009, 3, 174–180. [Google Scholar] [CrossRef]
- Ouyang, M.; Dueñas-Osorio, L.; Min, X. A three-stage resilience analysis framework for urban infrastructure systems. Struct. Saf. 2012, 36–37, 23–31. [Google Scholar] [CrossRef]
- Li, R.; Dong, Q.; Jin, C.; Kang, R. A new resilience measure for supply chain networks. Sustainability 2017, 9, 144. [Google Scholar] [CrossRef]
- Moutsinas, G.; Zou, M.; Guo, W. Uncertainty of resilience in complex networks with nonlinear dynamics. IEEE Syst. J. 2021, 15, 4687–4695. [Google Scholar] [CrossRef]
- Kiureghian, A.D.; Ditlevsen, O. Aleatory or epistemic? Does it matter? Struct. Saf. 2009, 31, 105–112. [Google Scholar] [CrossRef]
- Filippi, G.; Vasile, M.; Krpelik, D.; Korondi, P.Z.; Marchi, M.; Poloni, C. Space systems resilience optimisation under epistemic uncertainty. Acta Astronaut. 2019, 165, 195–210. [Google Scholar] [CrossRef]
- Ochieng, W.Y.; Sheridan, K.F.; Sauer, K.; Han, X.; Cross, P.A.; Lannelongue, S.; Ammour, N.; Petit, K. An assessment of the RAIM performance of a combined Galileo/GPS navigation system using the marginally detectable errors (MDE) algorithm. GPS Solut. 2002, 5, 42–51. [Google Scholar]
- Dong, Q.; Li, R.; Kang, R. System resilience evaluation and optimization considering epistemic uncertainty. Symmetry 2022, 14, 1182. [Google Scholar] [CrossRef]
- Liu, B. Uncertainty Theory; Springer: Berlin/Heidelberg, Germany, 2007; pp. 205–234. [Google Scholar]
- Liu, Y. Uncertain random variables: A mixture of uncertainty and randomness. Soft Comput. 2012, 17, 625–634. [Google Scholar] [CrossRef]
- Liu, B. Uncertainty Theory: A Branch of Mathematics for Modeling Human Uncertainty; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Ebeling, C. An Introduction to Reliability and Maintainability Engineering; Waveland Press: Long Grove, IL, USA, 2010. [Google Scholar]
- Zeng, Z.; Kang, R.; Wen, M.; Zio, E. A model-based reliability metric considering aleatory and epistemic uncertainty. IEEE Access 2017, 5, 15505–15515. [Google Scholar] [CrossRef]
- Ippolito, L.J. Satellite Communications Systems Engineering: Atmospheric Effects, Satellite Link Design and System Performance, 2nd ed.; Wiley: New York, NY, USA, 2017. [Google Scholar]
- Li, J.; Lu, H.; Xue, K.; Zhang, Y. Temporal netgrid model-based dynamic routing in large-scale small satellite networks. IEEE Trans. Veh. Technol. 2019, 68, 6009–6021. [Google Scholar] [CrossRef]
- Ekici, E.; Akyildiz, I.; Bender, M. A distributed routing algorithm for datagram traffic in LEO satellite networks. IEEE/ACM Trans. Netw. 2001, 9, 137–147. [Google Scholar] [CrossRef]
- Alagoz, F.; Korcak, O.; Jamalipour, A. Exploring the routing strategies in next-generation satellite networks. IEEE Wirel. Commun. 2007, 14, 79–88. [Google Scholar] [CrossRef]
- Williams, A.; Harding, W.; Hagemeier, H. Assessment of responsive replenishment launch for constellation management. In Proceedings of the Space Technology Conference and Exposition, Albuquerque, NM, USA, 28–30 September 1999; p. 4615. [Google Scholar]
- Zhang, G.; Zhang, H. Satellite Mobile Communication System; Posts & Telecom Press: Beijing, China, 2001. [Google Scholar]
- Li, J.; Li, Y. Modeling Ka-band satellite communication system with MPSK. In Proceedings of the 2nd IEEE International Conference on Computer and Communications, Chengdu, China, 14–17 October 2016; pp. 1785–1789. [Google Scholar]
- Jung, S.; Choi, J.P. End-to-end reliability of satellite communication network systems. IEEE Syst. J. 2021, 15, 791–801. [Google Scholar] [CrossRef]
- Yang, J.; Li, D.; Jiang, X.; Chen, S.; Hanzo, L. Enhancing the resilience of low earth orbit remote sensing satellite networks. IEEE Netw. 2020, 34, 304–311. [Google Scholar] [CrossRef]
- Cruz-Sánchez, H.; Franck, L.; Beylot, A.L. Routing metrics for store and forward satellite constellations. IET Commun. 2010, 4, 1563–1572. [Google Scholar] [CrossRef]
- Rango, F.D.; Tropea, M.; Santamaria, A.F.; Marano, S. Multicast QoS core-based tree routing protocol and genetic algorithm over an HAP-satellite architecture. IEEE Trans. Veh. Technol. 2009, 58, 4447–4461. [Google Scholar] [CrossRef]
- Liang, J.; Xiao, N.; Zhang, J. Constellation design and performance simulation of LEO satellite communication system. In Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2011; pp. 218–227. [Google Scholar]
- Long, F.; Xiong, N.; Vasilakos, A.V.; Yang, L.T.; Sun, F. A sustainable heuristic QoS routing algorithm for pervasive multi-layered satellite wireless networks. Wirel. Netw. 2009, 16, 1657–1673. [Google Scholar] [CrossRef]
- Garrison, T.P.; Ince, M.; Pizzicaroli, J.; Swan, P.A. Systems engineering trades for the IRIDIUM constellation. J. Spacecr. Rocket. 1997, 34, 675–680. [Google Scholar] [CrossRef]
- Li, J. The method of health management on satellite constellation network. In Proceedings of the 15th International Conference on Space Operations, Marseilles, France, 28 May–1 June 2018; pp. 624–630. [Google Scholar]
- Lu, Y.; Sun, F.; Zhao, Y. Virtual topology for LEO satellite networks based on earth-fixed footprint mode. IEEE Commun. Lett. 2013, 17, 357–360. [Google Scholar] [CrossRef]
- Werner, M. A dynamic routing concept for ATM-based satellite personal communication networks. IEEE J. Sel. Areas Commun. 1997, 15, 1636–1648. [Google Scholar] [CrossRef]
- Gao, Y. Shortest path problem with uncertain arc lengths. Comput. Math. Appl. 2011, 62, 2591–2600. [Google Scholar] [CrossRef]
- Choi, M.; Chung, W.; Choi, J. State estimation with delayed measurements incorporating time-delay uncertainty. IET Control Theory Appl. 2012, 6, 2351–2361. [Google Scholar] [CrossRef]
- Naka, H.; Deng, M.; Noge, Y. Particle filter based remote control for processeswith communication delays. In Proceedings of the 2018 International Conference on Advanced Mechatronic Systems, Zhengzhou, China, 30 August–2 September 2018. [Google Scholar]
- Korçak, Ö.; Alagöz, F.; Jamalipour, A. Priority-based adaptive routing in NGEO satellite networks. Int. J. Commun. Syst. 2007, 20, 313–333. [Google Scholar] [CrossRef]
- List of Countries by Number of Internet Users. 2020. Available online: https://en.wikipedia.org/wiki/List_of_countries_by_number_of_Internet_users (accessed on 6 November 2021).
- The World Factbook. 2020. Available online: https://www.cia.gov/the-world-factbook/ (accessed on 6 November 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Adjacency Matrix | Nodes | Edges | Connection Rules | Delays |
|---|---|---|---|---|
| Satellites | ISLs | Each satellite connects to its adjacent satellites | where is the length of ISL at time t, c is the propagation speed of electromagnetic waves, and is the processing delay of satellites | |
| Satellites and gateways | FLs | Each satellite connects to a connectable gateway according to the access criteria | , where is the length of FL at time t, and is the processing delay of the gateway | |
| Satellites and VNs | ULs | Each satellite connects to connectable VNs according to the access criteria | , where is the length of UL at time t, and is the processing delay of a VN |
| Backup Strategy | Strategy Details | Transfer Time |
|---|---|---|
| In-orbit | Each orbital plane has a backup orbit, where one or more backup satellites are deployed. An operating satellite that fails will de-orbit and a satellite on its backup orbit will be transferred to the site of failure. | The in-orbit backup transfer time depends on the satellite orbit height and the relative position of the failed satellite and the backup satellite, which is a deterministic constant. |
| Ground | When in-orbit backups are consumed to a certain extent, a carrier rocket will convey ground backups to supplement them. One rocket launch can carry one or more satellites. | The ground backup transfer time is mainly affected by the time to prepare the backup satellite. It can be estimated based on the production cycle, transfer cycle, other information and is a random variable. |
| Symbol | Meaning |
|---|---|
| Dynamic uncertain network | |
| Uncertain satellite network evolution model | |
| T | Simulation time |
| Satellite failure time distribution function | |
| Ground backup transfer time distribution function | |
| M | Number of satellite orbital planes |
| Number of satellites per orbit | |
| Number of in-orbit backup satellites per orbit | |
| Number of satellites carried by one rocket | |
| Satellite number. If , it is the nth satellite in the mth orbit. If , it is the th backup satellite in the mth orbit. | |
| Satellite failure time | |
| Satellite recovery time | |
| Operation time of satellite | |
| Failure time of satellite | |
| Transfer time of backup satellite | |
| Ground backup transfer time | |
| Status of satellite , where and indicate failure and normal states, respectively, at time |
| Node Type | Processing Delay (ms) |
|---|---|
| Virtual node | |
| Satellite | |
| Gateway |
| Recovery Strategies | Two In-Orbit Backups | One In-Orbit Backup and One Ground Backup | Two Ground Backups |
|---|---|---|---|
| Percentage | 9.87% | 83.96% | 6.17% |
| No. of In-Orbit Backups | 1 | 2 | 3 | ||
|---|---|---|---|---|---|
| Resilience | |||||
| Satellite Orbital Lifetime (years) | |||||
| 3 years | 0.7484 | 0.9766 | 0.9963 | ||
| 5 years | 0.8240 | 0.9828 | 0.9967 | ||
| 7 years | 0.9032 | 0.9969 | 0.9973 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Kang, R.; Li, R.; Zhang, Q.; Liu, L.; Wang, X. Uncertainty Theory-Based Resilience Analysis for LEO Satellite Communication Systems. Symmetry 2022, 14, 1568. https://doi.org/10.3390/sym14081568
Ma J, Kang R, Li R, Zhang Q, Liu L, Wang X. Uncertainty Theory-Based Resilience Analysis for LEO Satellite Communication Systems. Symmetry. 2022; 14(8):1568. https://doi.org/10.3390/sym14081568
Chicago/Turabian StyleMa, Ji, Rui Kang, Ruiying Li, Qingyuan Zhang, Liang Liu, and Xuewang Wang. 2022. "Uncertainty Theory-Based Resilience Analysis for LEO Satellite Communication Systems" Symmetry 14, no. 8: 1568. https://doi.org/10.3390/sym14081568
APA StyleMa, J., Kang, R., Li, R., Zhang, Q., Liu, L., & Wang, X. (2022). Uncertainty Theory-Based Resilience Analysis for LEO Satellite Communication Systems. Symmetry, 14(8), 1568. https://doi.org/10.3390/sym14081568