
Study on Destructive Informational Impact in Unmanned Aerial Vehicles Intergroup Communication


Abstract
:1. Introduction
2. Related Work
- Define and formalize the UAVs intergroup communication process;
- Define DII and HDII and develop calculus for their evaluation;
- Analyze the effects of HDII;
- Validate the HDII negative effects on the group’s performance via an empirical study.
3. Model of Intergroup Communication
- If have no technical issues, it participates in the task allocation auction;
- If is not performing the task now, it participates in the task allocation auction;
- If , participates in the task allocation auction for ;
- If , where , is assigned to .
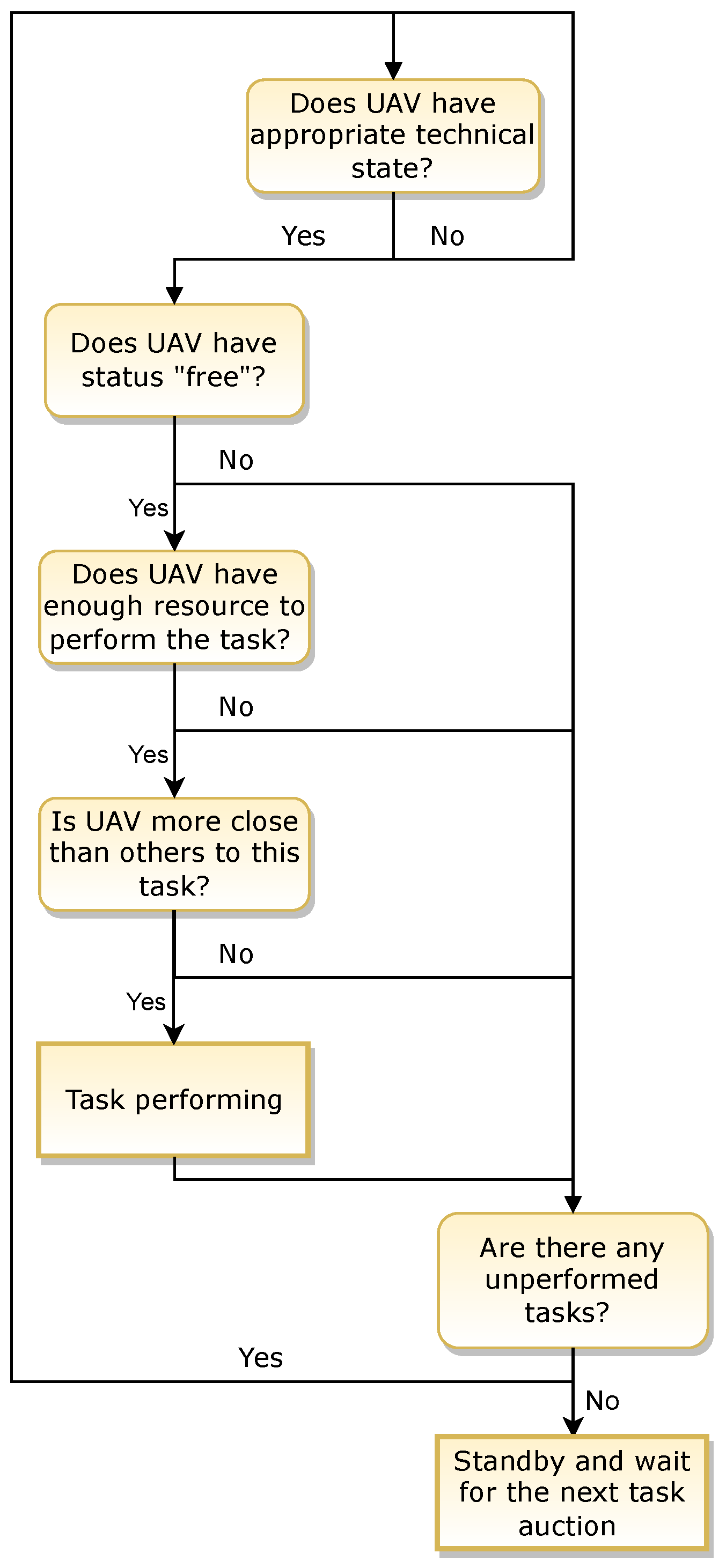
- The first step incorporates the appropriate technical state check. Particular technical checks may vary on a specific UAV’s characteristics and user or application requirements. For example, it may be a software integrity test or a hardware operation mode check.
- The aim of the second step is to verify if the UAV already assigned a task to perform. In the UAVs’ group initialization moment, all the UAVs have “free” status. Then, after the task is allocated to a specific UAV, its status changes to “busy”.
- The third step incorporates the resource balance check. The UAV’s approximate resource consumption to perform the task is calculated according to the distance to the task and UAV’s characteristics, which can vary depending on the user or application requirements. If the UAV has enough resources to perform the task, it proceeds to the next step of the auction.
- The fourth step’s aim is related to the evaluation of the distance between the task location and the UAV. The UAV that is closest to the task’s location is selected to perform it, if it passes the resource balance check.
- On the fifth step, the UAV changes its status to “busy” and starts to perform the task.
- After the task is performed, the UAV changes its status to “free”, and participates in the task allocation auction again. If there are no tasks to allocate, the UAV stands by and waits for the next tasks to be allocated.
4. Informational Interaction Vulnerabilities
4.1. UAV Internal Informational Interaction Vulnerabilities
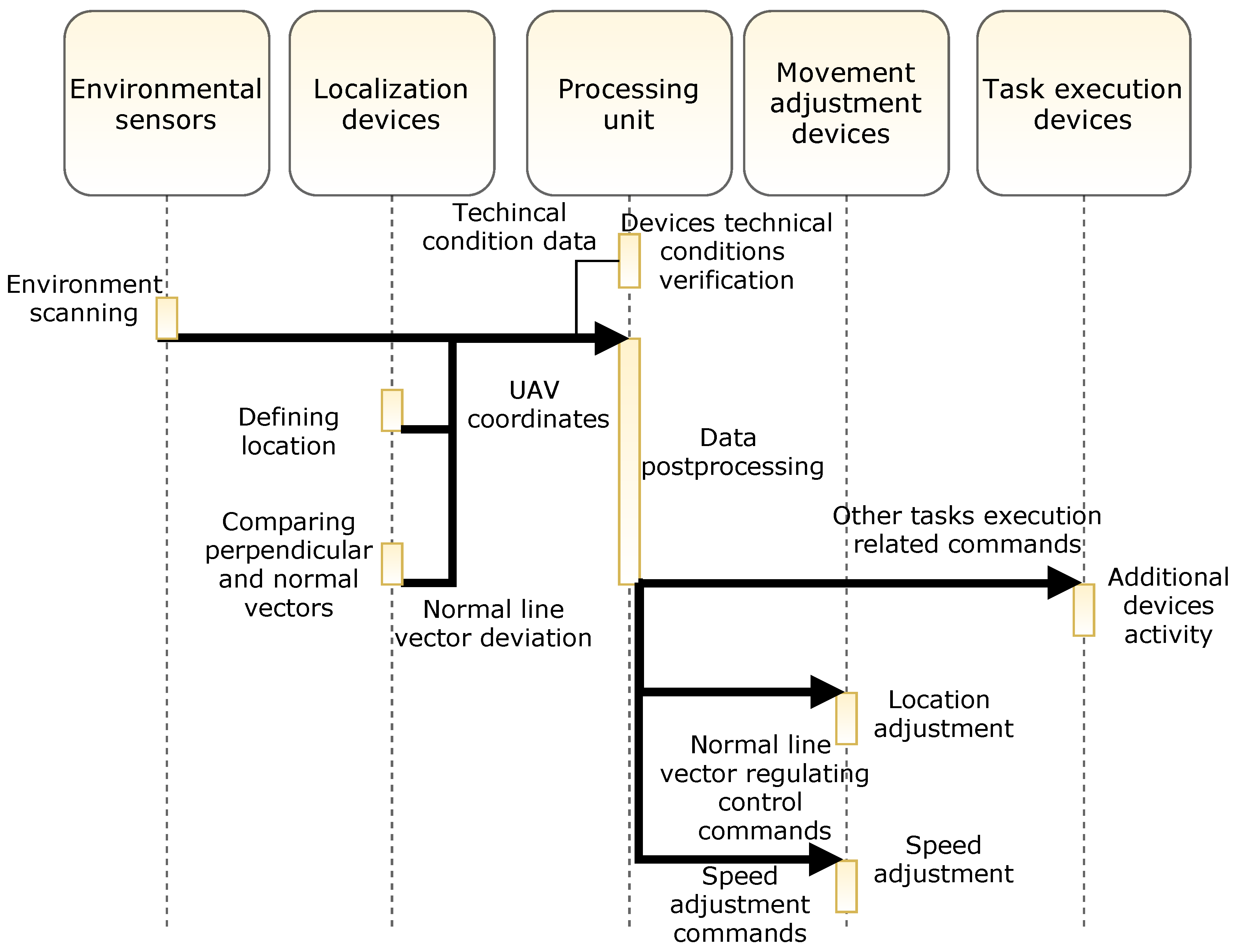
- Environmental sensors, which are devices designated to obtain the measurements from the environment. Particular devices can vary depending on the UAV’s characteristics and user or application requirements. Example of such devices are on-board cameras, ultrasonic range finders, LiDARs, etc.
- Localization devices, which are devices designated to perform localization and mapping of the UAV. Examples of such devices may be a GPS or a GLONASS sensors.
- Processing unit, which is the main computational core of the UAV. We assume that this component incorporates all the software and hardware that UAV uses to perform its computational tasks, such as decision making, processing of the received data, distance to obstacle evaluation, etc.
- Movement adjustment devices that incorporate rotors, blades, and devices to control them. These devices are used to adjust movement, regulate altitude, and control flight direction and speed.
- Task execution devices may include any devices that are required to perform a specific task. They may vary depending on the user or application requirements, an example may be a capturing device designated to transport cargo.
4.2. UAVs External Information Interaction Vulnerabilities
5. Threats Classification
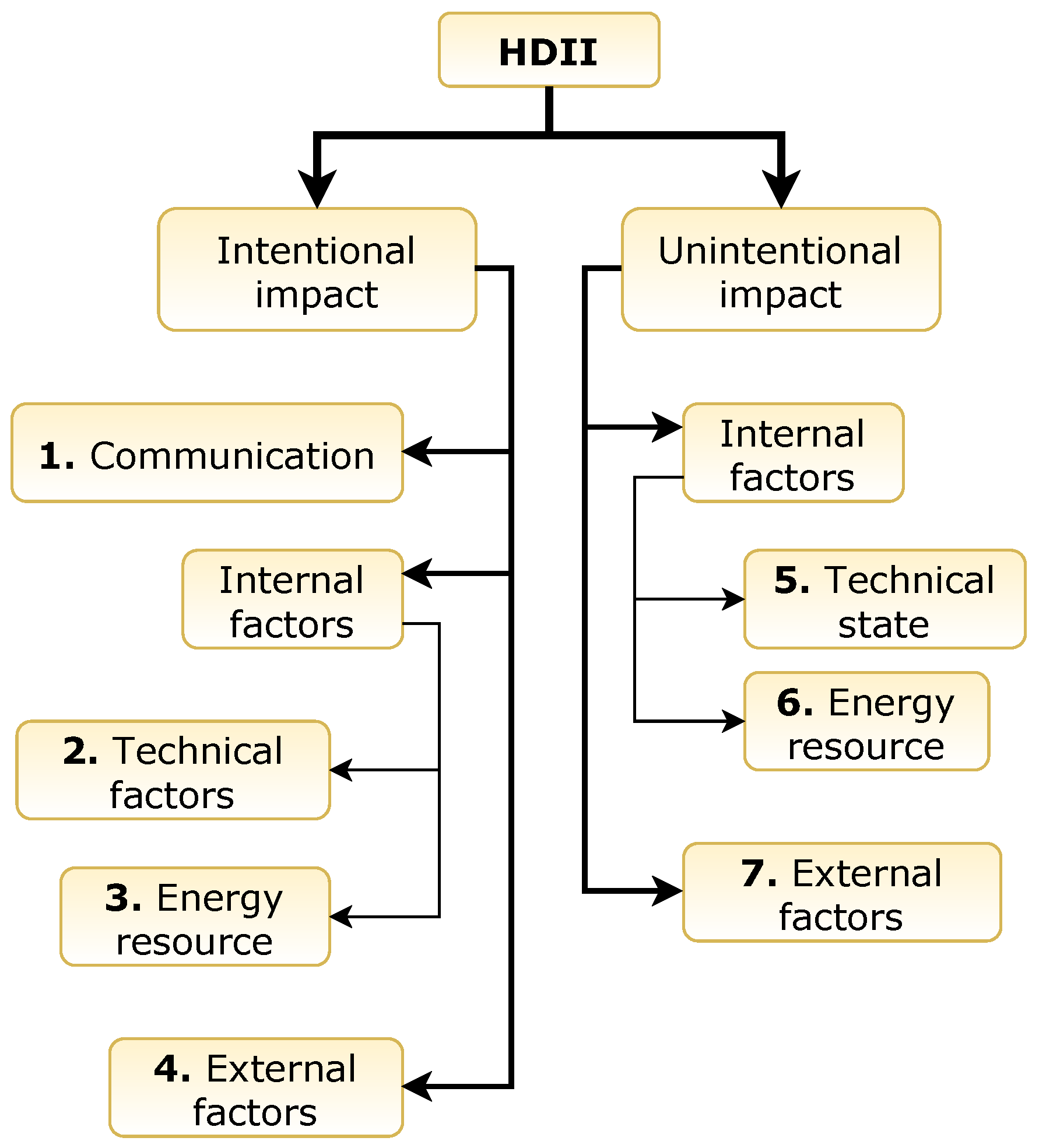
- Direct damage. In this type of damage, the number of completed tasks is affected directly, defined by (3).
- Undefined type of damage. The threat of UAVs group participants violation (in the case when the agent takes the task and spends energy in the process of its implementation) is represented by (4).
- Indirect damage. Increase in the average costs of performing the task by an individual group participants leads to the growth of the overall group costs. This type of damage is defined by (5).
- UAV does not participate in II and in the task allocation auction, but has such an opportunity.
- UAV provides false data on its technical state and does not participate in the task allocation auction.
- (a)
- Indirect damage. The average UAV individual task costs may increase with the constant number of completed tasks. This type of damage is defined by (8).
- (b)
- Direct damage. The number of completed tasks may decrease with the constant number of standard costs. This type of damage is defined according to (9).
- Direct damage. UAV provides false data on the lack of energy resources to perform tasks. In this case, the number of UAVs participating in the task allocation auction does not decrease. Such a scenario can lead to task completion failure due to an increase in costs of particular UAVs. As a consequence, other group participants are unable to take this task: .
- UAV provides false data on its location or environmental conditions.
- (a)
- Indirect damage. This type of behavior can lead to a task cost deviation, illustrated by (10).
- (b)
- Undetermined damage. UAV may face a lack of energy resources during the task performance. This can be a result of sub-optimal route selection. It is defined according to (11).
- (c)
- Direct damage. As a result, the above-described consequences convergence can lead to a decrease in the number of tasks completed: .
- Direct damage. UAV provides false data on its appropriate technical state. Thus, the task can be assigned to the UAV, but it is unable to perform this task. Therefore, .
- UAV provides false data on its energy resource.
- (a)
- Undetermined damage. In this case, implemented HDII results in UAV battery discharge before it completes the task. Defined by (12).
- (b)
- Direct damage. In such a scenario, implemented HDII may lead to a decrease in the completed tasks number: .
- UAV transmits false localization or environmental conditions data.
- (a)
- Indirect damage. This type of behavior can affect the number of tasks completed. It is defined according to (13).
- (b)
- Undetermined damage. Other group participants may face a lack of energy resources during tasks performance. This can be a result of sub-optimal route selection. It is defined by (14).
- (c)
- Direct damage. Increasing of tasks costs or UAVs failures may affect the overall group performance: .
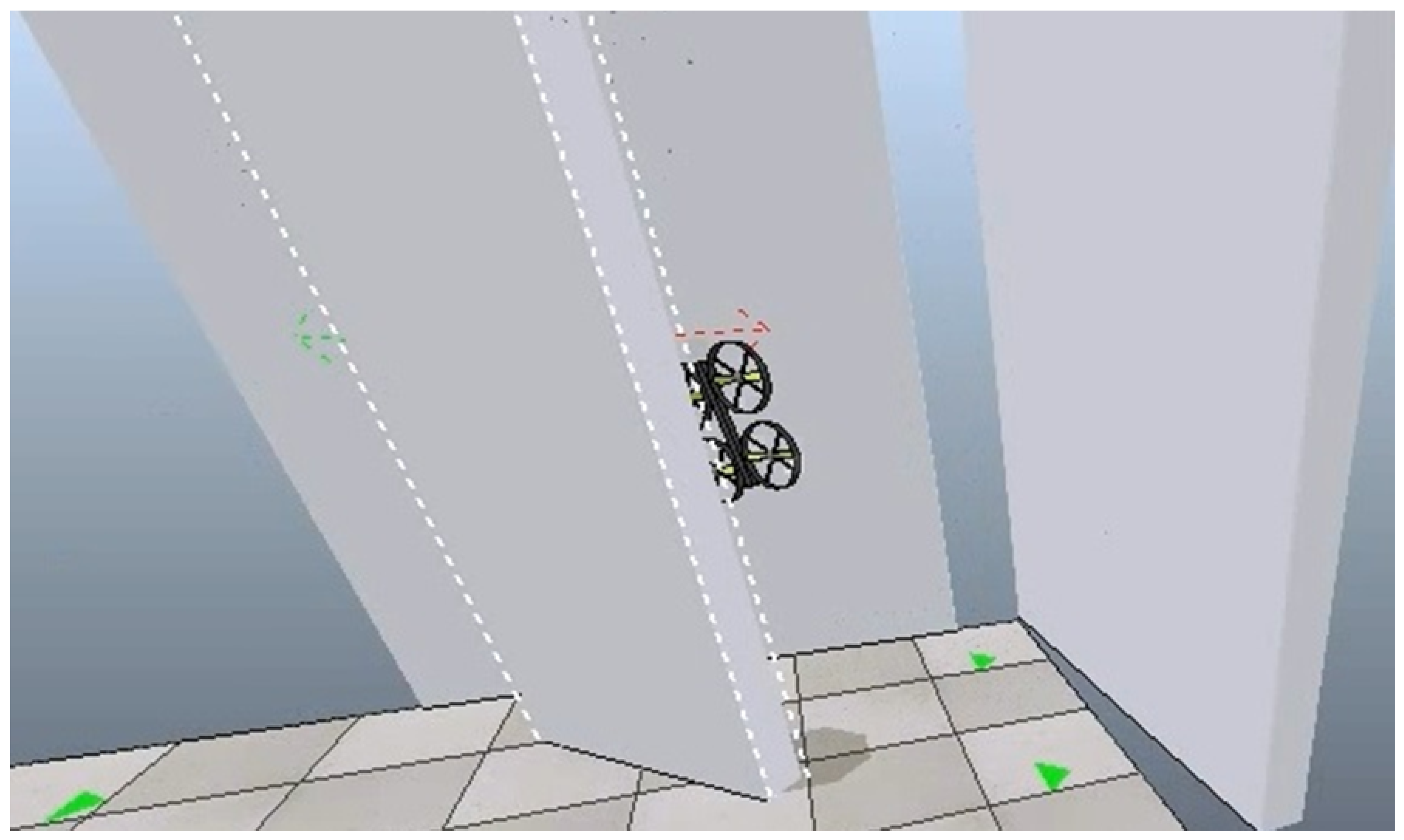
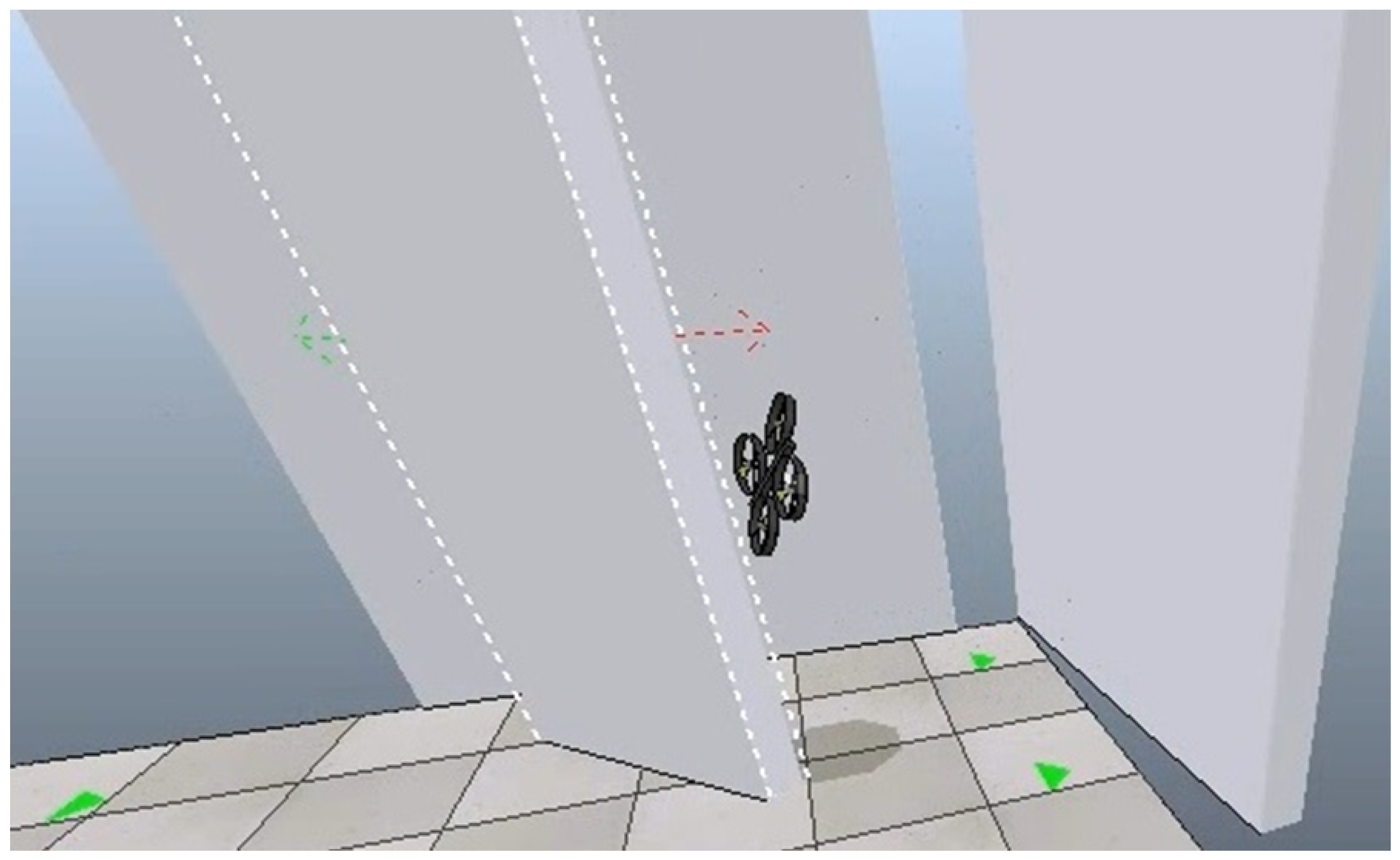
6. Empirical Study of HDII Effect on UAVs Group Performance
| Algorithm 1: Example of obstacles overcoming algorithm employed in the empirical study. |
 |
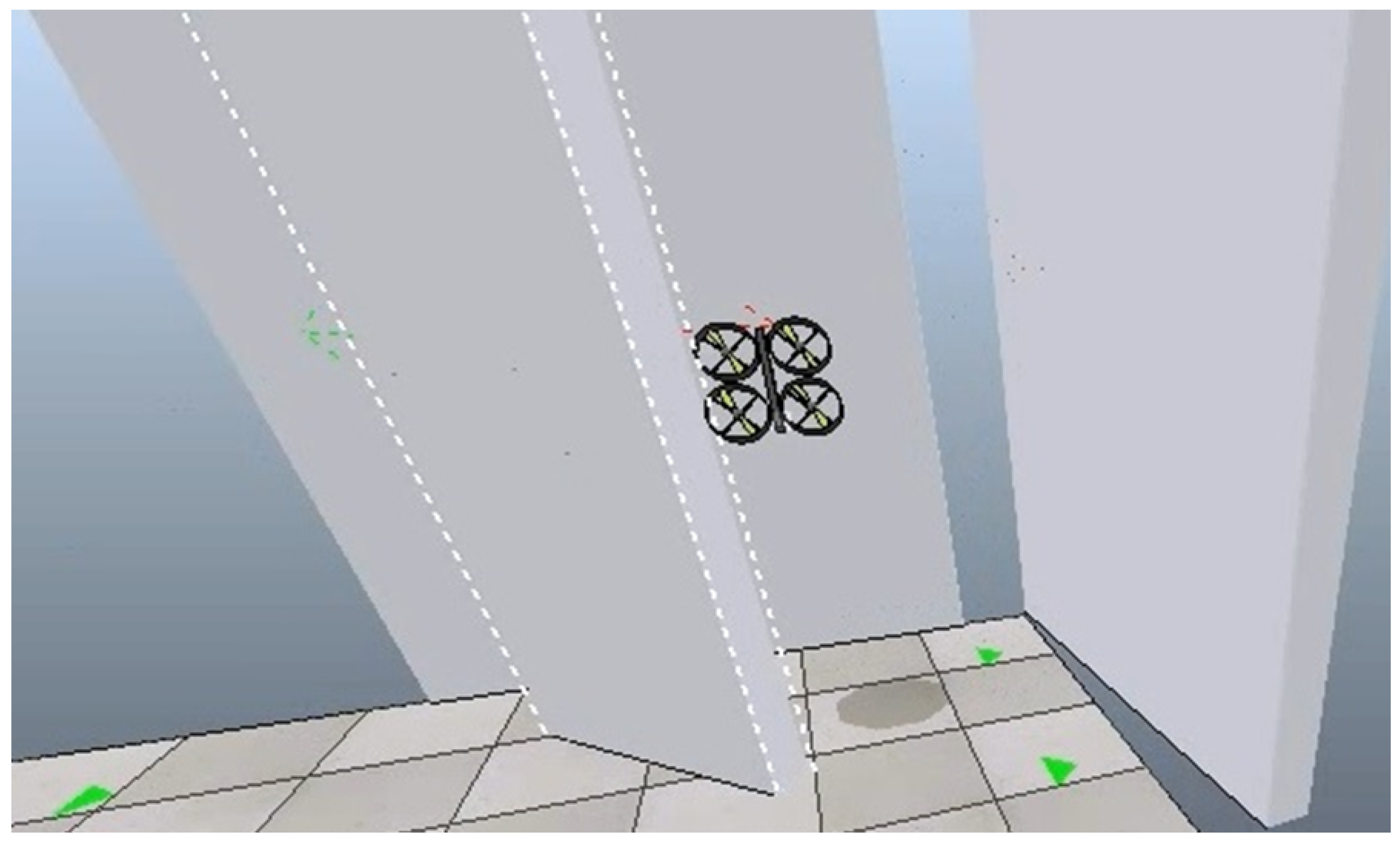
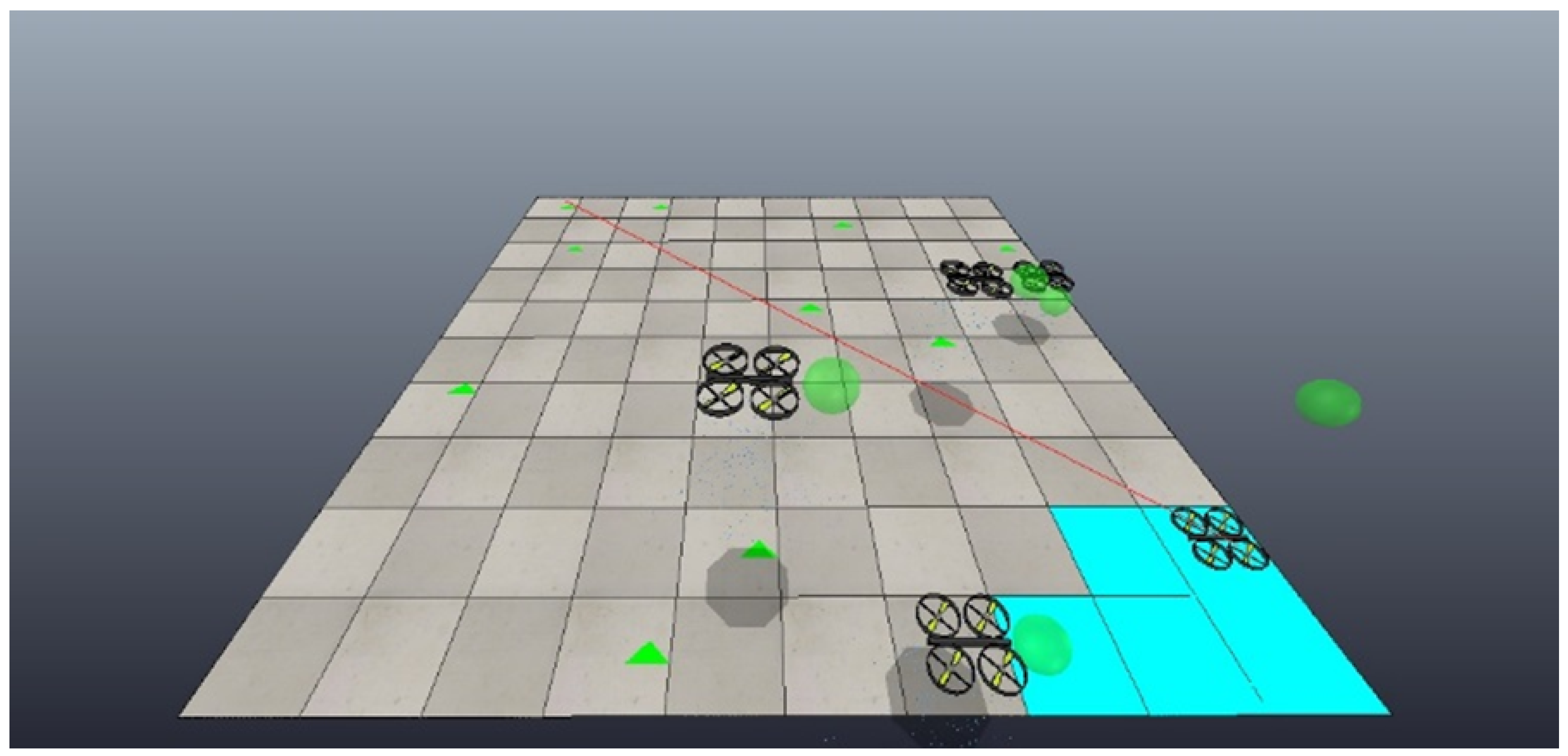
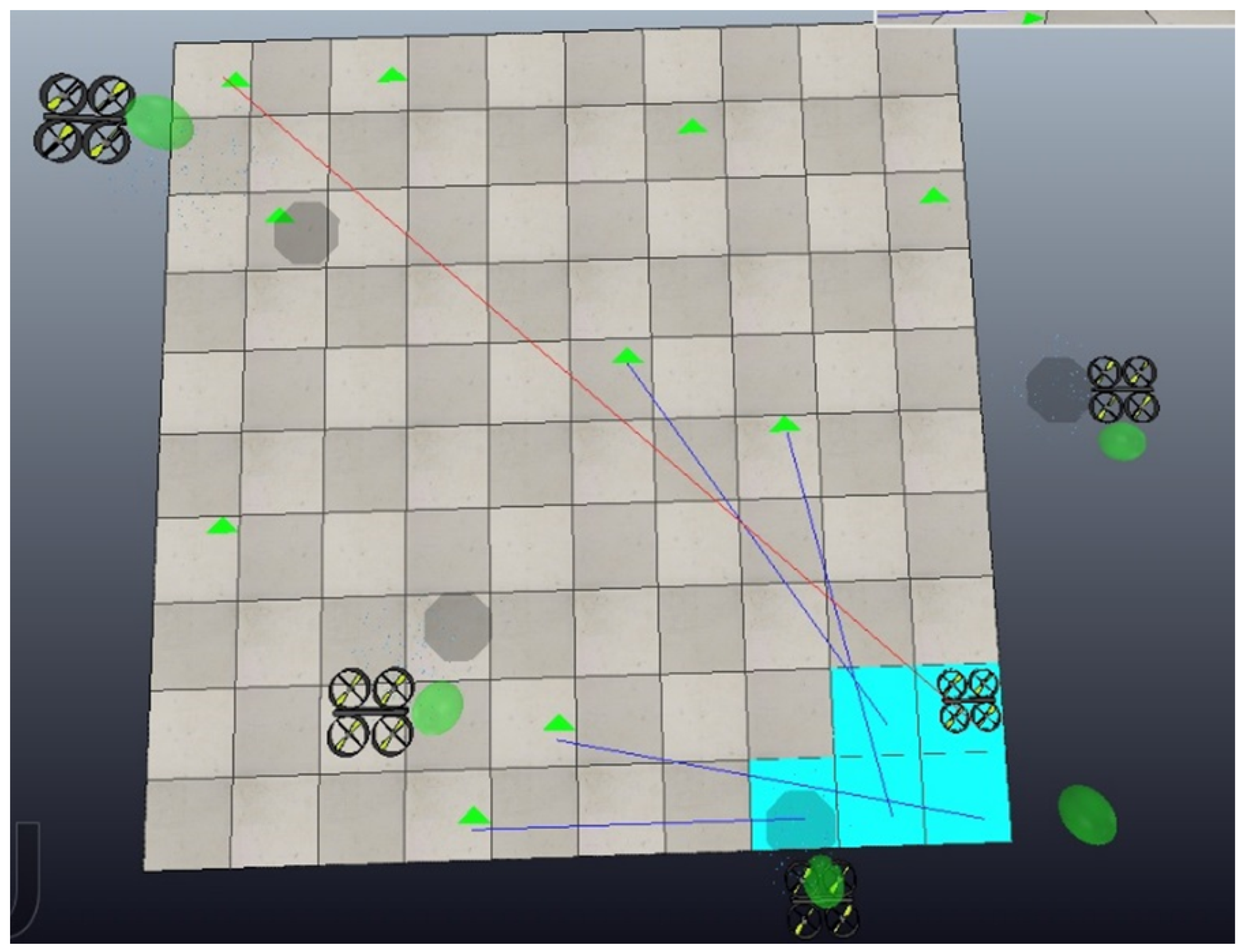
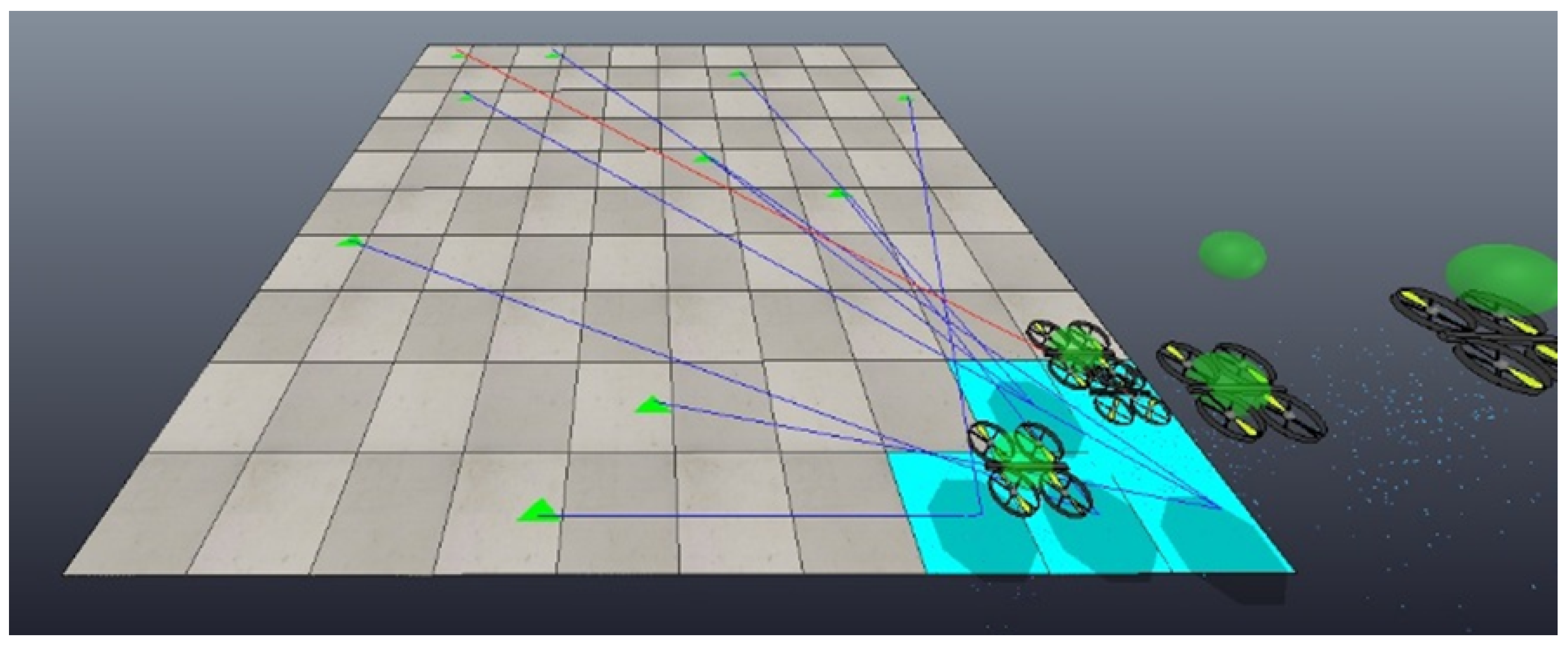
6.1. Simulation Setup
- Unperformed, if the task has not been assigned to any of the UAVs yet;
- In progress, if the task is assigned to one of the UAVs, but has not been completed yet;
- Completed, if the task has been completed.
- “Free”, if the UAV is not performing any task at the current moment;
- “Unavailable”, if the UAV is in the process of task performing.
- If the distance towards the “flag” from two or more UAVs is equal, the task is assigned to the participant with a highest ID;
- If the distance towards two or more tasks from the UAV is equal, the task with the minimal ID is assigned to the UAV;
- If there are no tasks with the “unperformed” status, the UAV stays in the zone A.
6.2. Empirical Study Results
7. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Guan-Zheng, T.; Huan, H.; Sloman, A. Ant colony system algorithm for real-time globally optimal path planning of mobile robots. Acta Autom. Sin. 2007, 33, 279–285. [Google Scholar]
- Chung, T.H.; Jones, K.D.; Day, M.A.; Jones, M.; Clement, M. 50 vs. 50 by 2015: Swarm vs. Swarm uav Live-Fly Competition at the Naval Postgraduate School; Curran Associates, Inc.: Red Hook, NY, USA, 2013; pp. 1792–1811. [Google Scholar]
- Yakimenko, O.A.; Chung, T.H. Extending autonomy capabilities for unmanned systems with CRUSER. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences (ICAS 2012), Brisbane, Australia, 23–28 September 2012; pp. 47–49. [Google Scholar]
- Yang, J.H.; Kapolka, M.; Chung, T.H. Autonomy balancing in a manned-unmanned teaming (MUT) swarm attack. In Robot Intelligence Technology and Applications 2012; Springer: Berlin/Heidelberg, Germany, 2013; pp. 561–569. [Google Scholar]
- Chung, T.H.; Burdick, J.W.; Murray, R.M. A decentralized motion coordination strategy for dynamic target tracking. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 2416–2422. [Google Scholar]
- Tsao, K.Y.; Girdler, T.; Vassilakis, V.G. A survey of cyber security threats and solutions for UAV communications and flying ad-hoc networks. Ad Hoc Netw. 2022, 133, 102894. [Google Scholar] [CrossRef]
- Yahuza, M.; Idris, M.Y.I.; Ahmedy, I.B.; Wahab, A.W.A.; Nandy, T.; Noor, N.M.; Bala, A. Internet of drones security and privacy issues: Taxonomy and open challenges. IEEE Access 2021, 9, 57243–57270. [Google Scholar] [CrossRef]
- Lin, C.; He, D.; Kumar, N.; Choo, K.K.R.; Vinel, A.; Huang, X. Security and Privacy for the Internet of Drones: Challenges and Solutions. IEEE Commun. Mag. 2018, 56, 64–69. [Google Scholar] [CrossRef]
- Zikratov, I.A.; Vadimirovna, K.E.; Viktorovna, Z.T. Vulnerability analysis of robotic systems with swarm intelligence. J. Sci. Tech. Inf. Technol. Mech. Opt. 2013, 87, 149–154. [Google Scholar]
- Huang, S.; Teo, R.S.H.; Tan, K.K. Collision avoidance of multi unmanned aerial vehicles: A review. Annu. Rev. Control 2019, 48, 147–164. [Google Scholar] [CrossRef]
- Kulikov, A.; Timoshenko, A.; Zhukov, A.; Kartsan, I. Control system for multi-agent groups of heterogeneous sensors. In Proceedings of the MIP Computing-V 2022: V International Scientific Workshop on Modeling, Information Processing and Computing, Krasnoyarsk, Russia, 25 January 2022; pp. 1–6. [Google Scholar]
- Luo, L.; Wang, X.; Ma, J.; Ong, Y.S. Grpavoid: Multigroup collision-avoidance control and optimization for UAV swarm. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Koval, E.; Lebedev, I. Obshchaya model’bezopasnosti robototekhnicheskikh sistem [General model of robotic systems information security]. Sci. Tech. J. Inf. Technol. Mech. Opt. 2013, 4, 86. [Google Scholar]
- Viksnin, I. A model of information security for cyberphysical systems. Sci. Bus. Ways Dev. 2018, 2, 15–20. [Google Scholar]
- Komarov, I.; Yur’eva, R.; Drannik, A.; Maslennikov, O.; Kovalenko, M.; Egorov, D. Research on destructive impact of robots-sabouters’ influence on multi-agent system’s productivity. Control Process. Stab. 2014, 1, 336–340. [Google Scholar]
- Zikratov, I.; Zikratova, T.; Lebedev, I. Trust model for information security of multi-agent robotic systems with a decentralized management. Sci. Tech. J. Inf. Technol. Mech. Opt. 2014, 14, 47–52. [Google Scholar]
- Chuprov, S.; Viksnin, I.; Kim, I.; Marinenkov, E.; Usova, M.; Lazarev, E.; Melnikov, T.; Zakoldaev, D. Reputation and Trust Approach for Security and Safety Assurance in Intersection Management System. Energies 2019, 12, 4527. [Google Scholar] [CrossRef] [Green Version]
- Zikratov, I.A.; Viksnin, I.; Zikratova, T.; Shlykov, A.; Medvedkov, D. Security model of mobile multi-agent robotic systems with collective management. Sci. Tech. J. Inf. Technol. Mech. Opt. 2017, 17, 443. [Google Scholar] [CrossRef]
- Kirichenko, V. Information security of communication channel with UAV. Electron. Control Syst. 2015, 3, 23–27. [Google Scholar] [CrossRef]
- Rivera, E.; Baykov, R.; Gu, G. A Study on Unmanned Vehicles and Cyber Security; Rivera 2014 ASO: El Paso, TX, USA, 2014. [Google Scholar]
- Hooper, M.; Tian, Y.; Zhou, R.; Cao, B.; Lauf, A.P.; Watkins, L.; Robinson, W.H.; Alexis, W. Securing commercial wifi-based uavs from common security attacks. In Proceedings of the MILCOM 2016—2016 IEEE Military Communications Conference, Baltimore, MD, USA, 1–3 November 2016; pp. 1213–1218. [Google Scholar]
- Sidorov, V.; Ng, W.K.; Lam, K.Y.; Salleh, M. Cyber-threat analysis of a UAV traffic management system for urban airspace. In Proceedings of the Air Transport Research Society World Conference, Bordeaux, France, 5–8 July 2017; Volume 2017. [Google Scholar]
- Watkins, L.; Ramos, J.; Snow, G.; Vallejo, J.; Robinson, W.H.; Rubin, A.D.; Ciocco, J.; Jedrzejewski, F.; Liu, J.; Li, C. Exploiting multi-vendor vulnerabilities as back-doors to counter the threat of rogue small unmanned aerial systems. In Proceedings of the 1st ACM MobiHoc Workshop on Mobile IoT Sensing, Security, and Privacy, Los Angeles, CA, USA, 26 June 2018; pp. 1–6. [Google Scholar]
- Higgins, F.; Tomlinson, A.; Martin, K.M. Threats to the swarm: Security considerations for swarm robotics. Int. J. Adv. Secur. 2009, 2, 288–297. [Google Scholar]
- Sedjelmaci, H.; Senouci, S.M. Cyber security methods for aerial vehicle networks: Taxonomy, challenges and solution. J. Supercomput. 2018, 74, 4928–4944. [Google Scholar] [CrossRef]
- Javaid, A.Y. Cyber Security Threat Analysis and Attack Simulation for Unmanned Aerial Vehicle Network. Ph.D. Thesis, University of Toledo, Toledo, OH, USA, 2015. [Google Scholar]
- Kalyaev, I.; Gaiduk, A.; Kapustyan, S. Modeli i Algoritmy Kollektivnogo Upravleniya v Gruppakh Robotov; Fizmatlit: Moscow, Russia, 2009; 280p. [Google Scholar]
- Chuprov, S.; Viksnin, I.; Kim, I.; Usova, M. Intersection management tasks in mobile robotic system with decentralized control. In Proceedings of the 10th Majorov International Conference on Software Engineering and Computer Systems, Saint-Petersburg, Russia, 12–13 December 2019; pp. 1–12. [Google Scholar]
- Nanjanath, M.; Gini, M. Repeated auctions for robust task execution by a robot team. Robot. Auton. Syst. 2010, 58, 900–909. [Google Scholar] [CrossRef] [Green Version]
- Gao, L.; Yu, S.; Luan, T.H.; Zhou, W. Delay Tolerant Networks; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Karnik, N.M.; Tripathi, A.R. Security in the Ajanta mobile agent system. Softw. Pract. Exp. 2001, 31, 301–329. [Google Scholar] [CrossRef]
- Shibli, M.A.; Muftic, S. Magicnet: Security architecture for authorization of mobile agents. In Proceedings of the 3rd International Conference on Internet Technologies and Applications, ITA 09, Wrexham, UK, 8–11 September 2009; pp. 506–513. [Google Scholar]
- Vigna, G. Protecting mobile agents through tracing. In Proceedings of the 3rd ECOOP Workshop on Mobile Object Systems, Jyväskylä, Finland, 9–13 June 1997; pp. 1–14. [Google Scholar]
- Lee, H.; Alves-Foss, J.; Harrison, S. The use of encrypted functions for mobile agent security. In Proceedings of the 37th Annual Hawaii International Conference on System Sciences, Big Island, HI, USA, 5–8 January 2004; p. 10. [Google Scholar]
- Page, J.; Zaslavsky, A.; Indrawan, M. A buddy model of security for mobile agent communities operating in pervasive scenarios. In Proceedings of the Second Workshop on Australasian Information Security, Data Mining and Web Intelligence, and Software Internationalisation, Dunedin, New Zealand, 1 January 2004; Australian Computer Society, Inc.: Dunedin, New Zealand, 2004; Volume 32, pp. 17–25. [Google Scholar]
- Viksnin, I.I.; Schcepin, N.D.; Patrikeev, R.O.; Shlykov, A.A.; Komarov, I.I. Approaches to communication organization within cyber-physical systems. In Proceedings of the 2017 20th Conference of Open Innovations Association (FRUCT), St. Petersburg, Russia, 3–7 April 2017; pp. 484–490. [Google Scholar]
- Guan, X.; Yang, Y.; You, J. POM-a mobile agent security model against malicious hosts. In Proceedings of the Fourth International Conference/Exhibition on High Performance Computing in the Asia-Pacific Region, Beijing, China, 14–17 May 2000; Volume 2, pp. 1165–1166. [Google Scholar]
- Vigna, G. Cryptographic traces for mobile agents. In Mobile Agents and Security; Springer: Berlin/Heidelberg, Germany, 1998; pp. 137–153. [Google Scholar]
- Rohmer, E.; Singh, S.P.; Freese, M. V-REP: A versatile and scalable robot simulation framework. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1321–1326. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direct | Undetermined | Indirect |
|---|---|---|
| The agent does not participate in the II and, as a consequence, in the auction, but has such an opportunity (1b, according to Section 5) | The agent provides false localization and environmental data (4b, according to Section 5) | The agent does not participate in II and, as a consequence, in the auction, but has such an opportunity (1a, according to Section 5) |
| The agent provides false data on the technical state and does not participate in the auction (2b, according to Section 5) | The agent provides false data on the technical state and does not participate in the auction (2a, according to Section 5) | |
| The agent provides false data on the remaining resources to perform tasks (3, according to Section 5) | The agent believes that has enough energy resources to perform the task (6a, according to Section 5) | |
| The agent provides false localization and environmental data (4c, according to Section 5) | The agent provides false localization and environmental data (4a, according to Section 5) | |
| The agent believes that it has a proper technical state (5, according to Section 5) | The agent reports incorrect localization and environmental data (7b, according to Section 5) | |
| The agent believes that it has enough energy to perform the task (6b, according to Section 5) | The agent reports false localization and environmental data (7a, according to Section 5) | |
| The agent reports incorrect localization and environmental data (7c, according to Section 5) |
| Average Expended Energy Resources | Failed UAVs | Completed Tasks |
|---|---|---|
| 79.2% | 0% | 100% |
| HDII Type | Average Expended Energy Resources | Failed UAVs | Completed Tasks | Damage Type |
|---|---|---|---|---|
| 1 | 95.3% | 0% | 100% | Indirect |
| 2 | 96.6% | 0% | 100% | Indirect |
| 3 | 73.8% | 0% | 90% | Direct |
| 4 | 96.2% | 20% | 90% | Indirect, Undetermined, Direct |
| 5 | 59.5% | 0% | 90% | Direct |
| 6 | 82.3% | 10% | 100% | Undetermined |
| 7 | 96.7% | 10% | 100% | Indirect, Undetermined |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marinenkov, E.; Chuprov, S.; Tursukov, N.; Kim, I.; Viksnin, I. Study on Destructive Informational Impact in Unmanned Aerial Vehicles Intergroup Communication. Symmetry 2022, 14, 1580. https://doi.org/10.3390/sym14081580
Marinenkov E, Chuprov S, Tursukov N, Kim I, Viksnin I. Study on Destructive Informational Impact in Unmanned Aerial Vehicles Intergroup Communication. Symmetry. 2022; 14(8):1580. https://doi.org/10.3390/sym14081580
Chicago/Turabian StyleMarinenkov, Egor, Sergei Chuprov, Nikita Tursukov, Iuliia Kim, and Ilia Viksnin. 2022. "Study on Destructive Informational Impact in Unmanned Aerial Vehicles Intergroup Communication" Symmetry 14, no. 8: 1580. https://doi.org/10.3390/sym14081580
APA StyleMarinenkov, E., Chuprov, S., Tursukov, N., Kim, I., & Viksnin, I. (2022). Study on Destructive Informational Impact in Unmanned Aerial Vehicles Intergroup Communication. Symmetry, 14(8), 1580. https://doi.org/10.3390/sym14081580