
Map Construction and Path Planning Method for Mobile Robots Based on Collision Probability Model


Abstract
:1. Introduction
- (1)
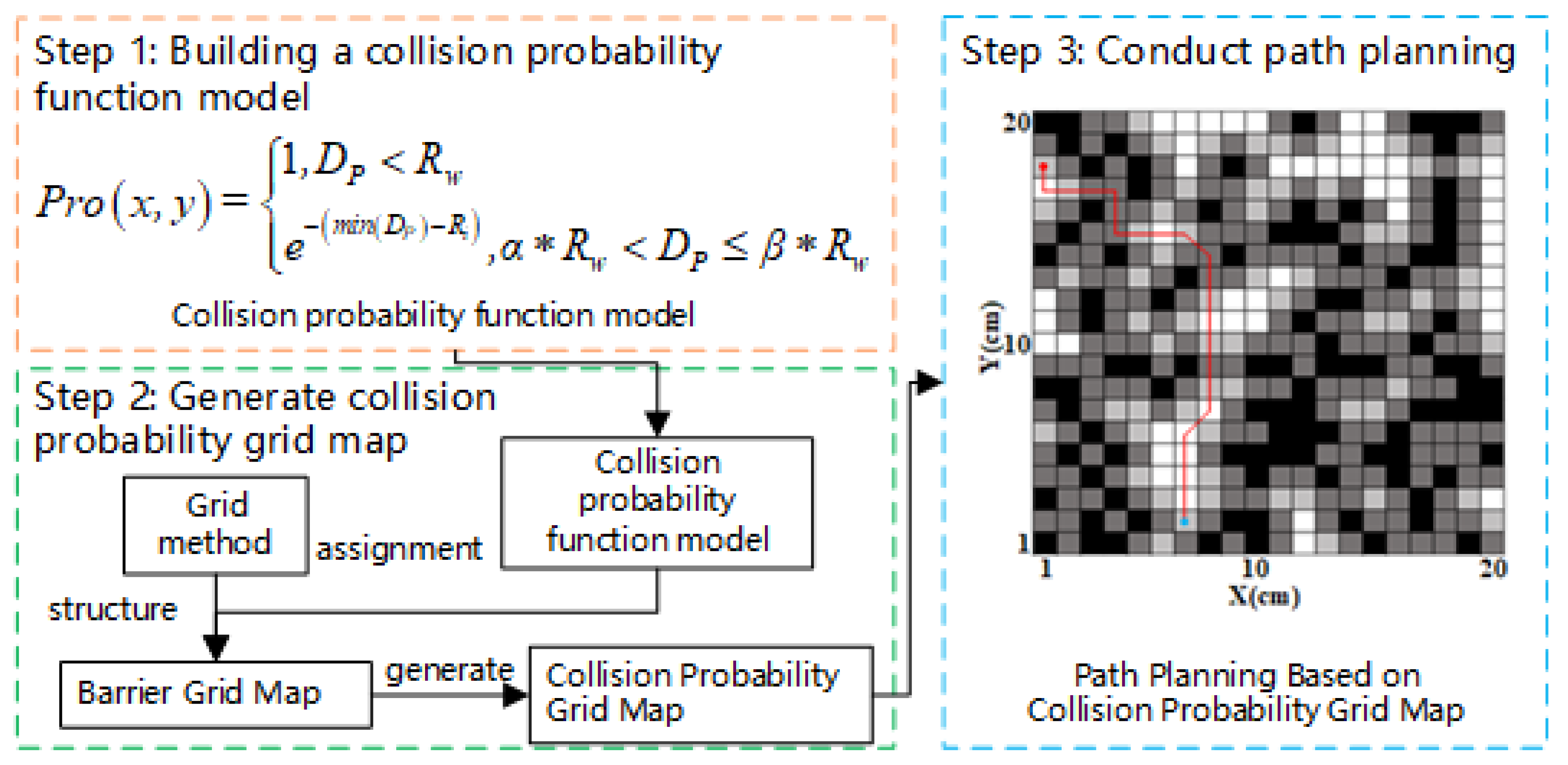
- A collision probability function model which is based on robot size and considers the distance between robots and obstacles is proposed, providing a theoretical basis for subsequent collision probability grid map construction and safe path planning.
- (2)
- Based on the obstacle grid map and collision probability function model constructed by using the grid method, a CPGM construction method is proposed. With this method, a grid map containing collision probability information can be constructed, which assigns collision probability information to all idle grids in the obstacle grid map. This method not only solves the problem of the lack of collision probability information in the construction of environment maps for mobile robots but also provides safety information for the subsequent path planning problem.
- (3)
- On the basis of the CPGM, we improve the A* algorithm by fully utilizing the collision probability values of each grid in the CPGM and incorporating them into the actual cost function of the A* algorithm. Our improved algorithm solves the problem of the lack of security in the paths planned by the traditional A* algorithm and improves the safety and robustness of mobile robots.
2. Related Works
2.1. Environmental Map Construction
2.2. Path Planning
3. CPGM Construction and Path Planning Method
3.1. Collision Probability Function Model
3.1.1. Definition of Collision Probability
- (1)
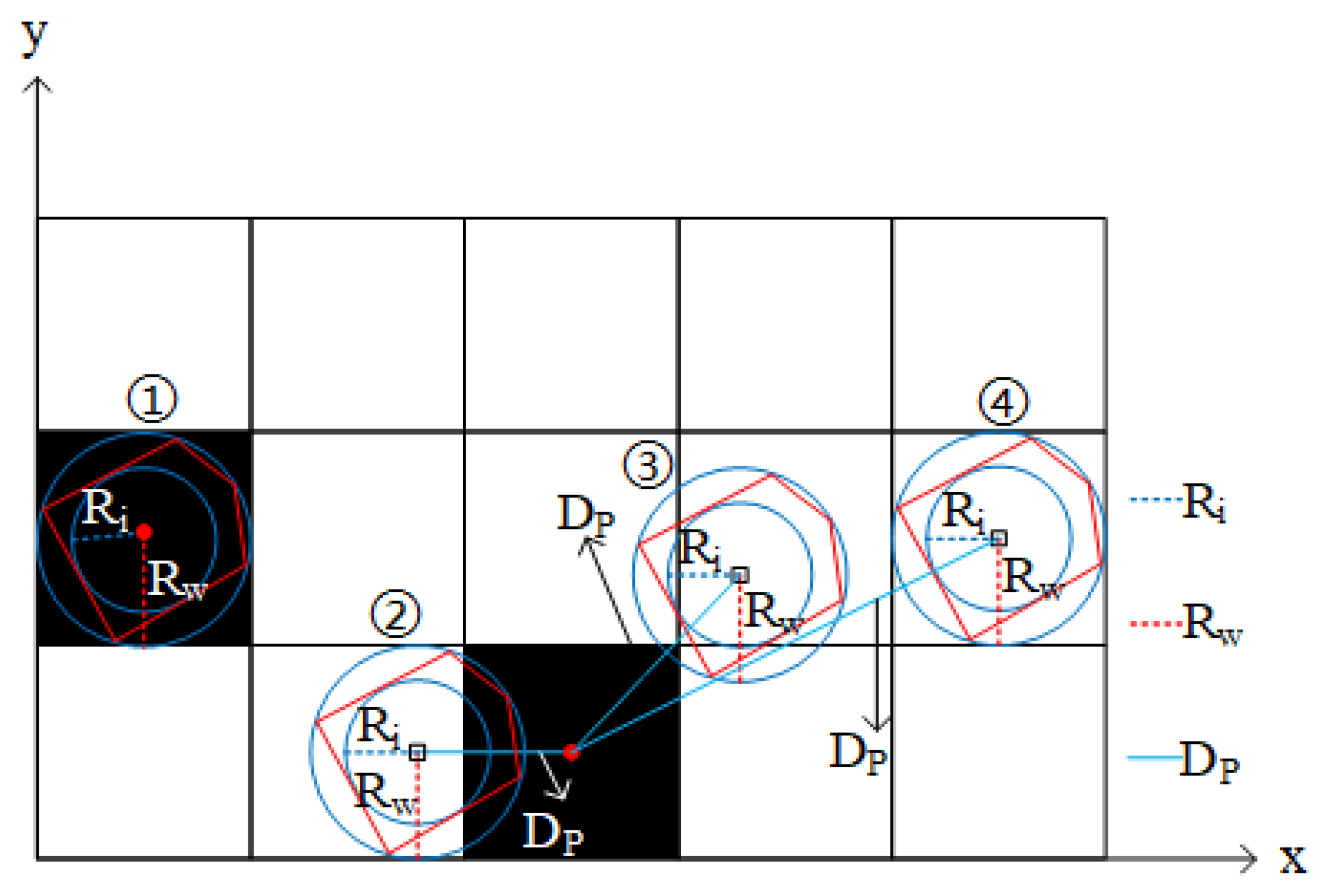
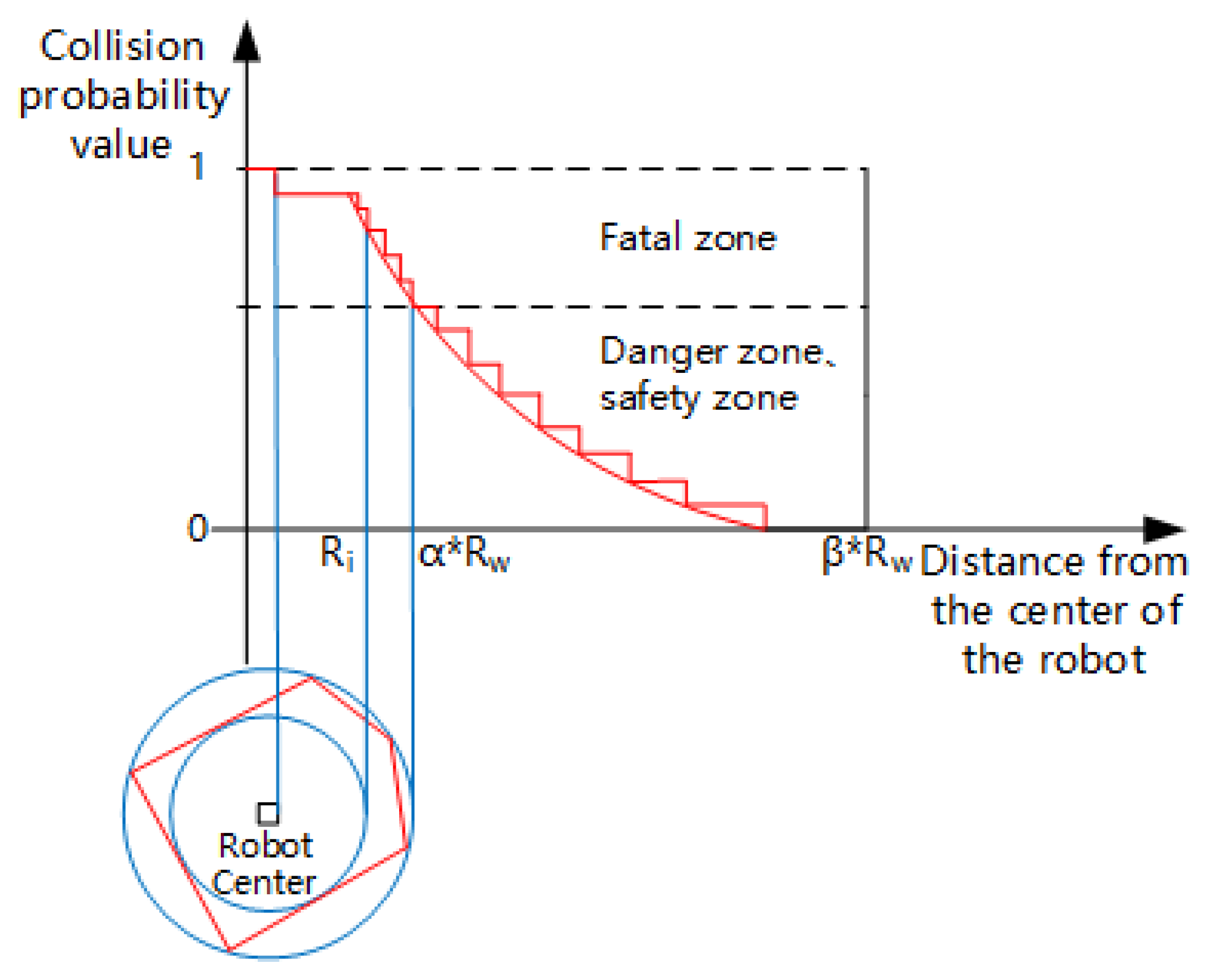
- When the distance between the center of the robot occupying the grid and the center of the obstacle grid is less than the radius of the robot’s inscribed circle, that is, , at this point the obstacle overlaps with the center of the robot, as shown in the first scenario in Figure 2. When the center of the robot occupies a distance between the grid and the center of the obstacle grid that is greater than the grid edge length and less than the radius of the robot’s outer circle, that is, , at this point the obstacle is within the inscribed circle of the robot, as shown in the second case in Figure 2, and is bound to collide. When the distance between the center of the robot occupying the grid and the center of the obstacle grid is greater than the radius of the inscribed circle and less than the radius of the robot’s circumscribed circle, that is, , at this point, the obstacle is located within the outer tangent circle of its robot, as shown in the third scenario in Figure 2. It is at the collision threshold and may not necessarily collide, but it is very dangerous. Therefore, the above three situations are all marked as fatal zones, with a collision probability value range of 1. The specific calculation method is shown in Formula (1).
- (2)
- When the distance between the center of the robot occupying the grid and the center of the obstacle grid is greater than the radius of the robot’s circumscribed circle, that is, , at this point, the collision between the robot and the obstacle is caused by and , the value of which is determined, as shown in the fourth case in Figure 2, which is only an example of a collision situation. If and have a smaller value, and if it is closer to the obstacle, then it is recorded as a danger zone; If and have a larger value, and if it is farther away from the obstacle, then it is denoted as a safety zone, and the range of collision probability values for its grid is , the farther away from the obstacle, the lower the probability of collision. The specific calculation method is shown in Formula (2).
3.1.2. Expression of Collision Probability Function
3.2. Construction of Collision Probability Grid Map
3.2.1. Construction of Obstacle Grid Map
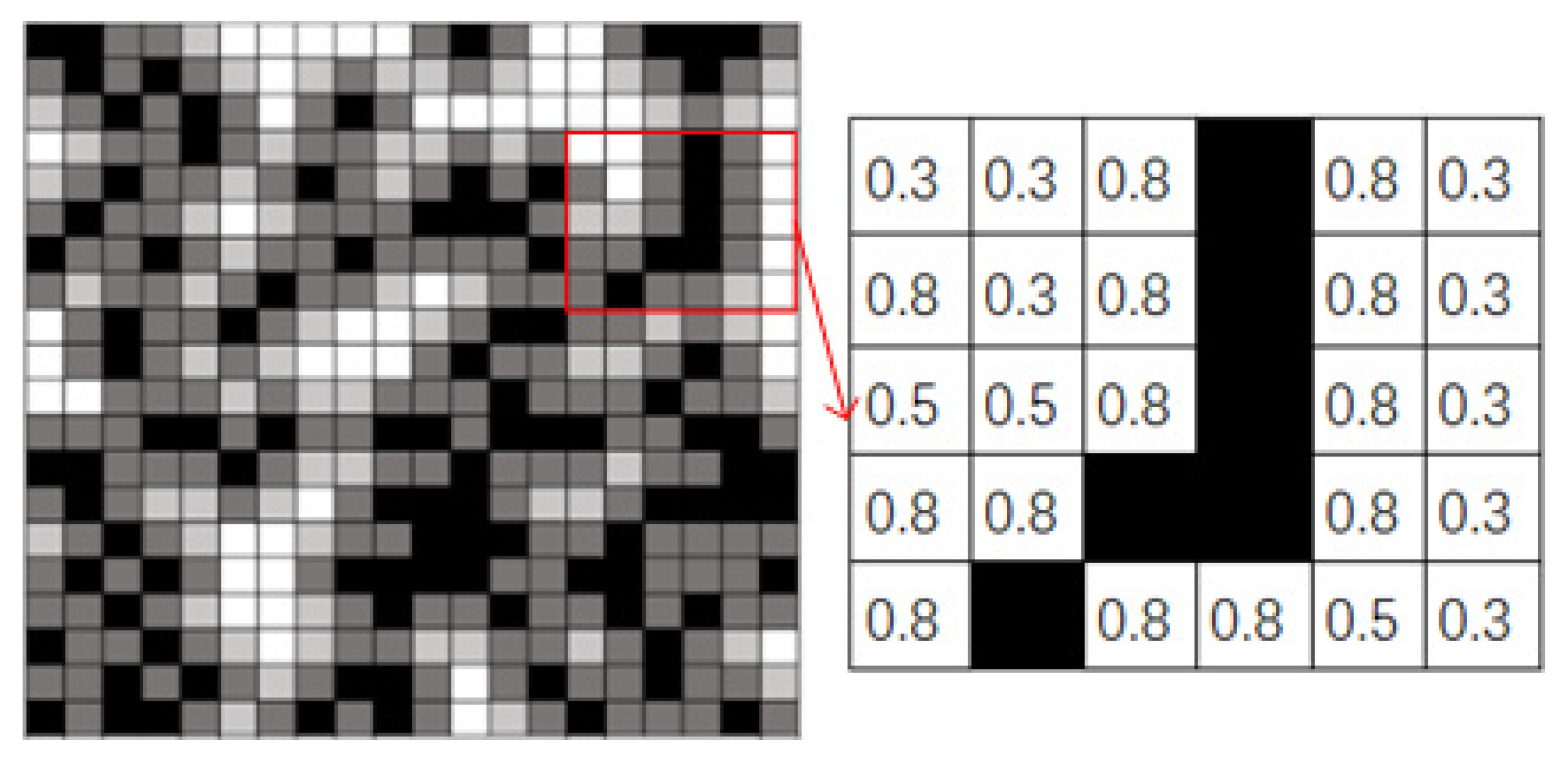
3.2.2. Construction of CPGM
3.3. Path Planning Based on CPGM
3.3.1. Traditional A* Algorithm
3.3.2. Improved A* Algorithm
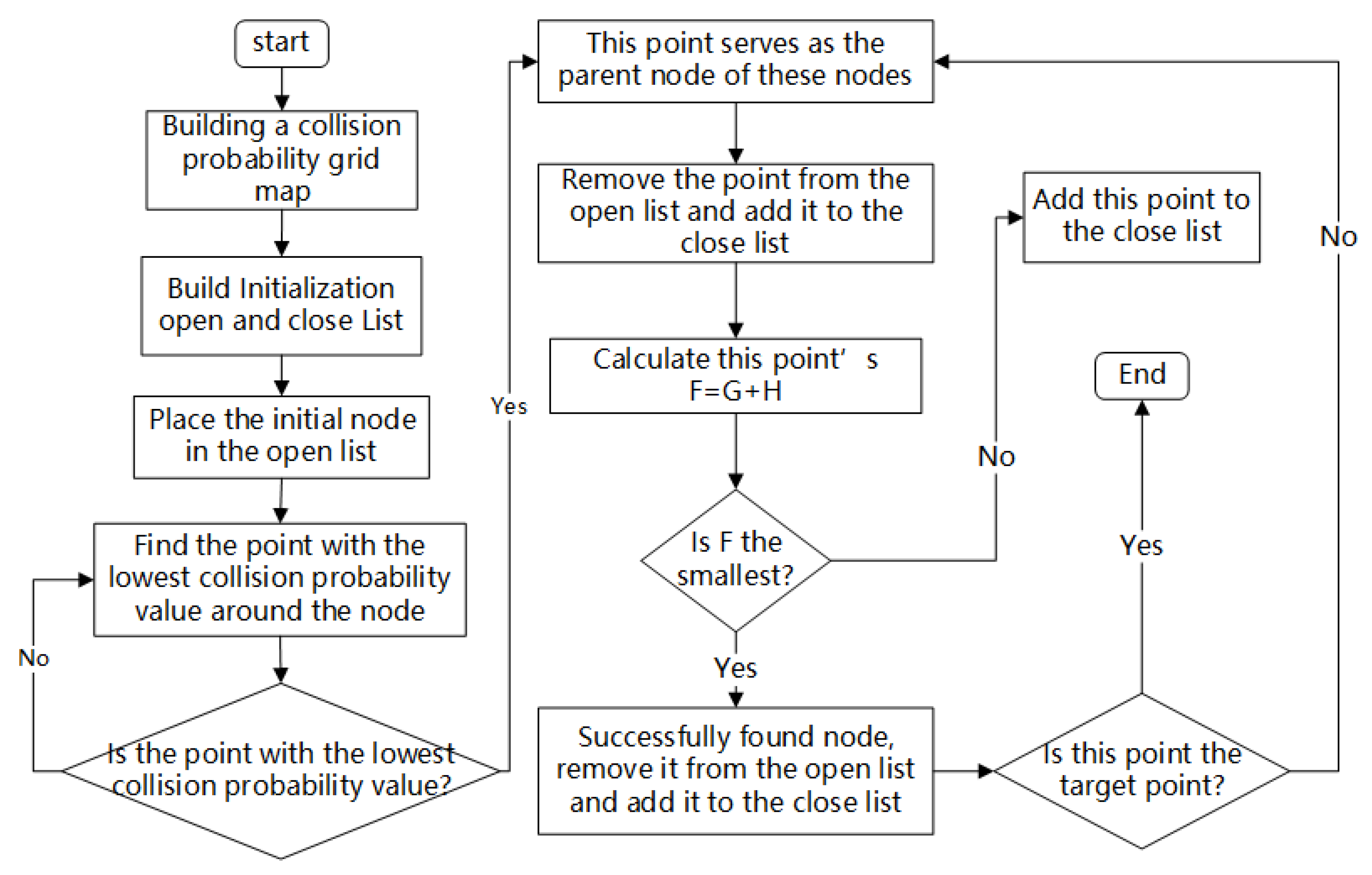
3.3.3. The Specific Process of the Improved A* Algorithm
4. Experiment and Analysis
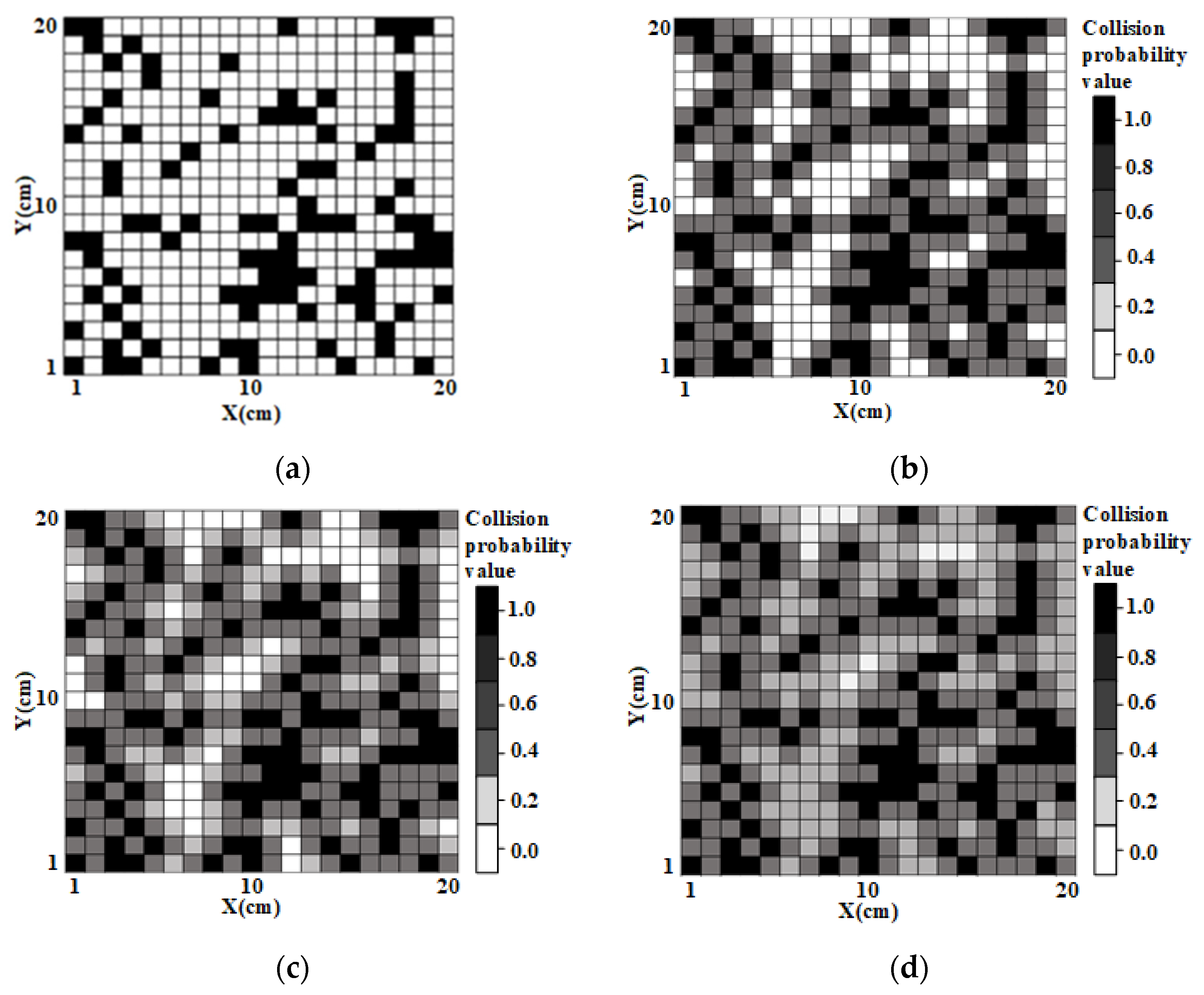
4.1. Experiment and Analysis of Constructing the CPGM
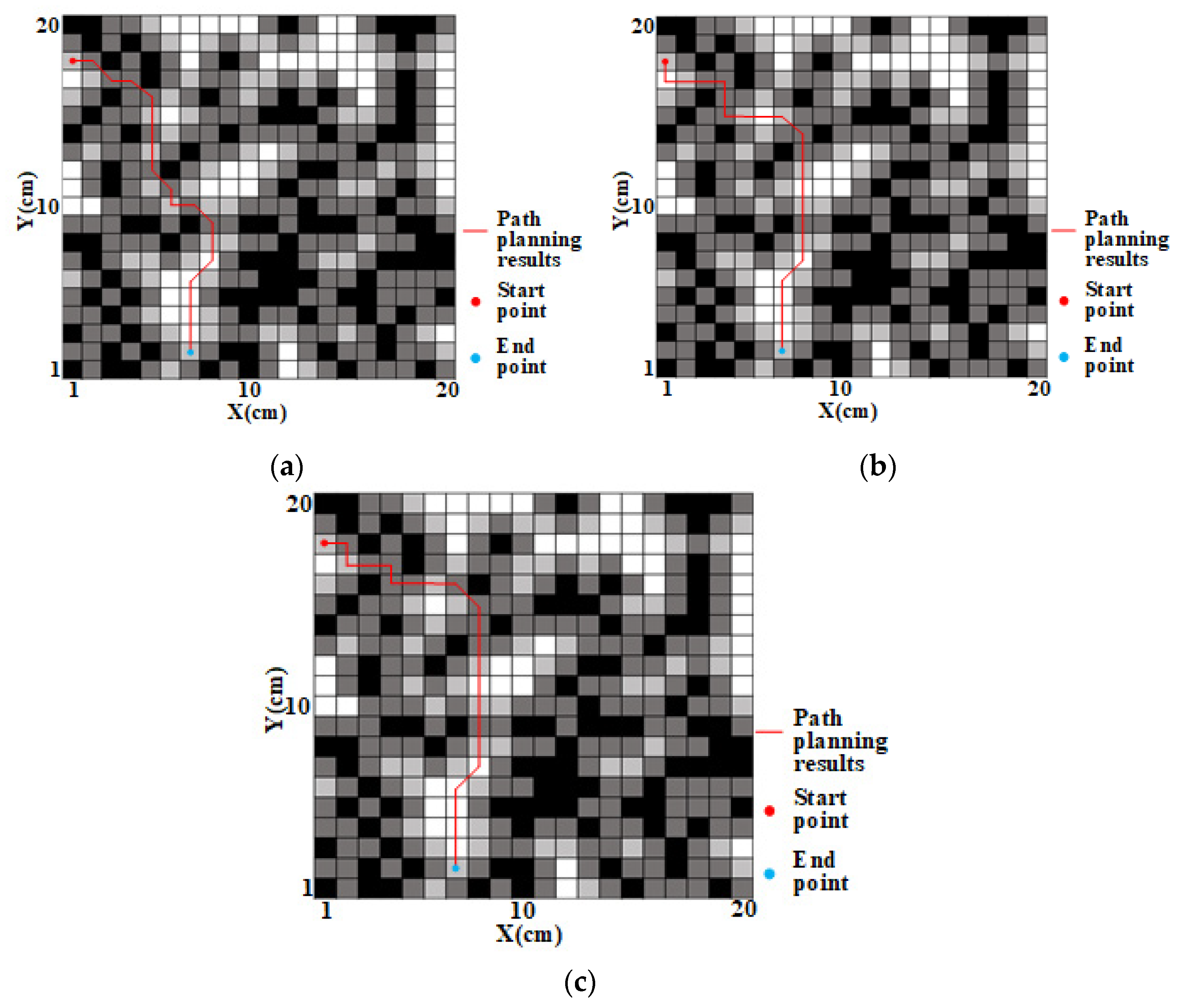
4.2. Experiment and Analysis of Path Planning Based on CPGM
4.2.1. Simulation of Different Parameters
4.2.2. Simulation of Different Algorithms
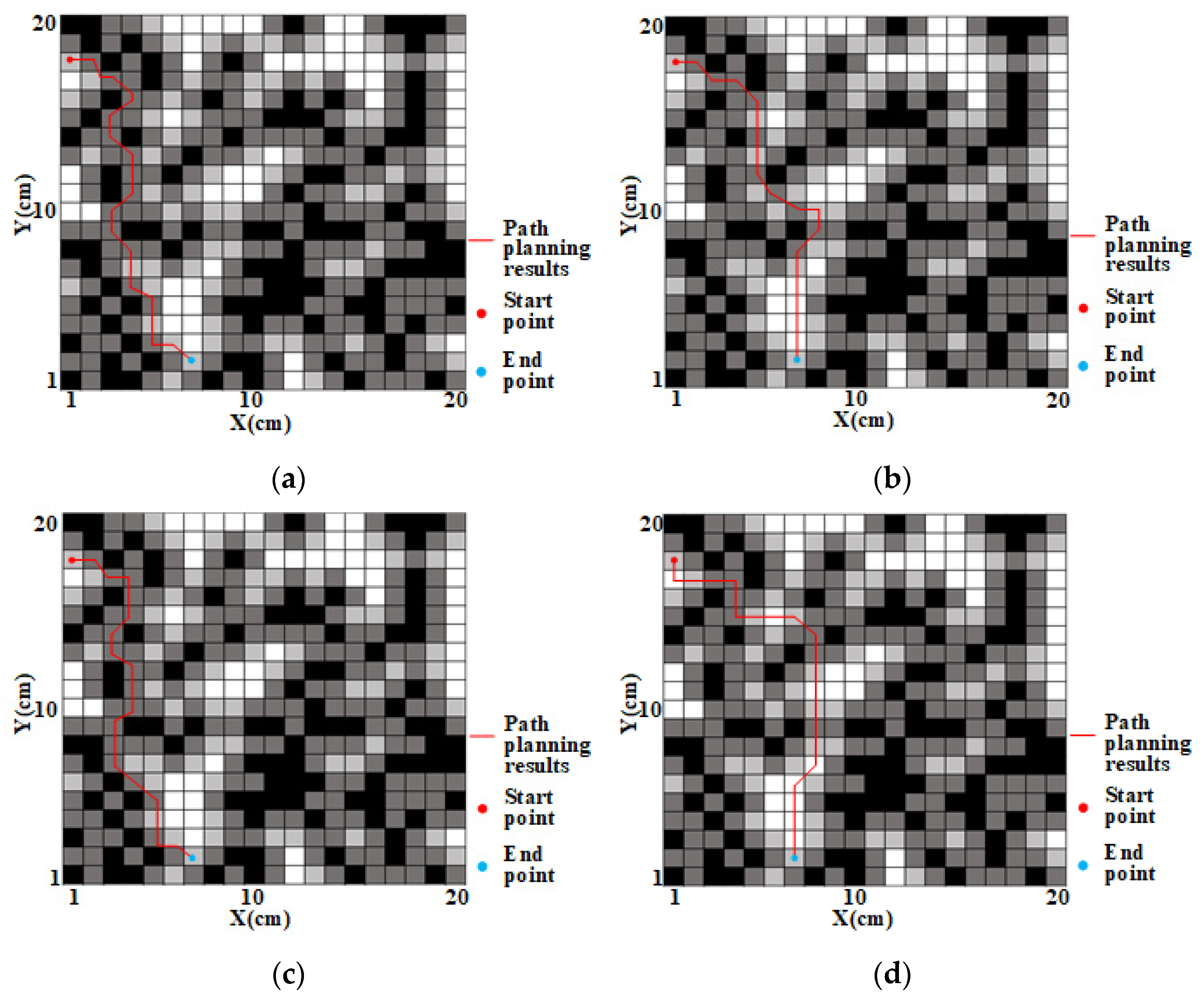
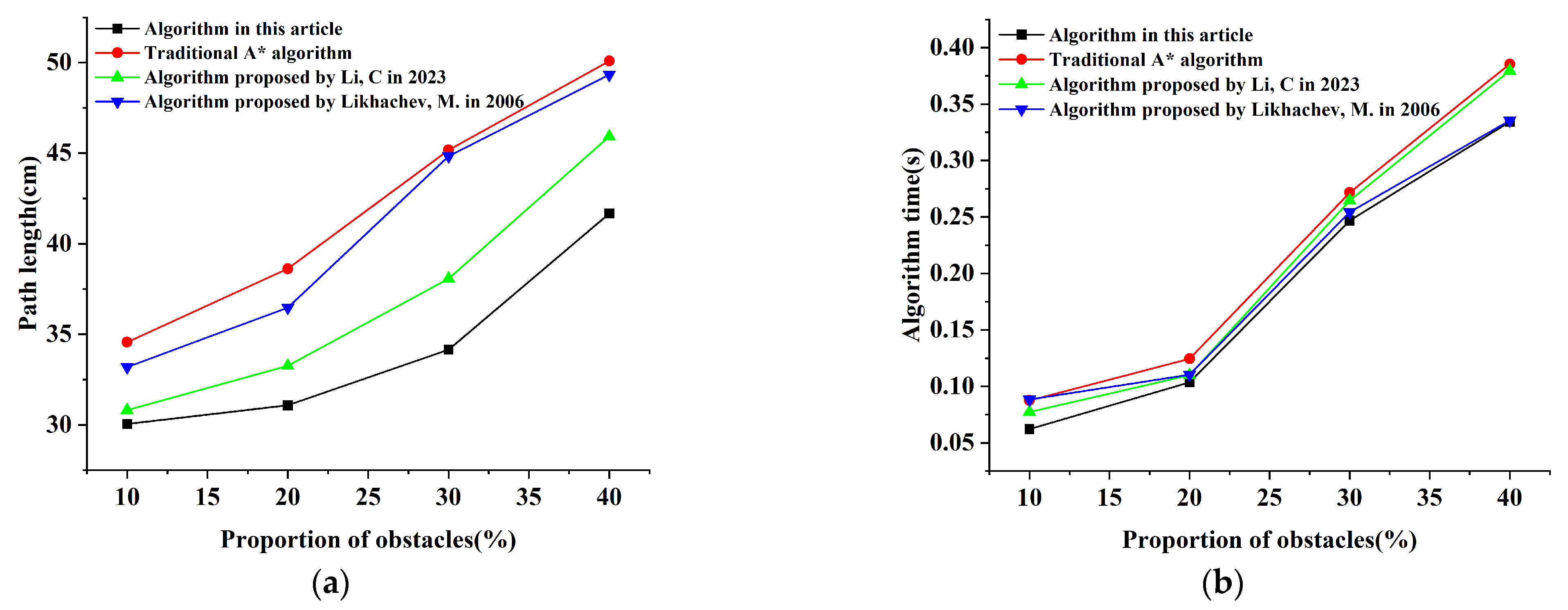
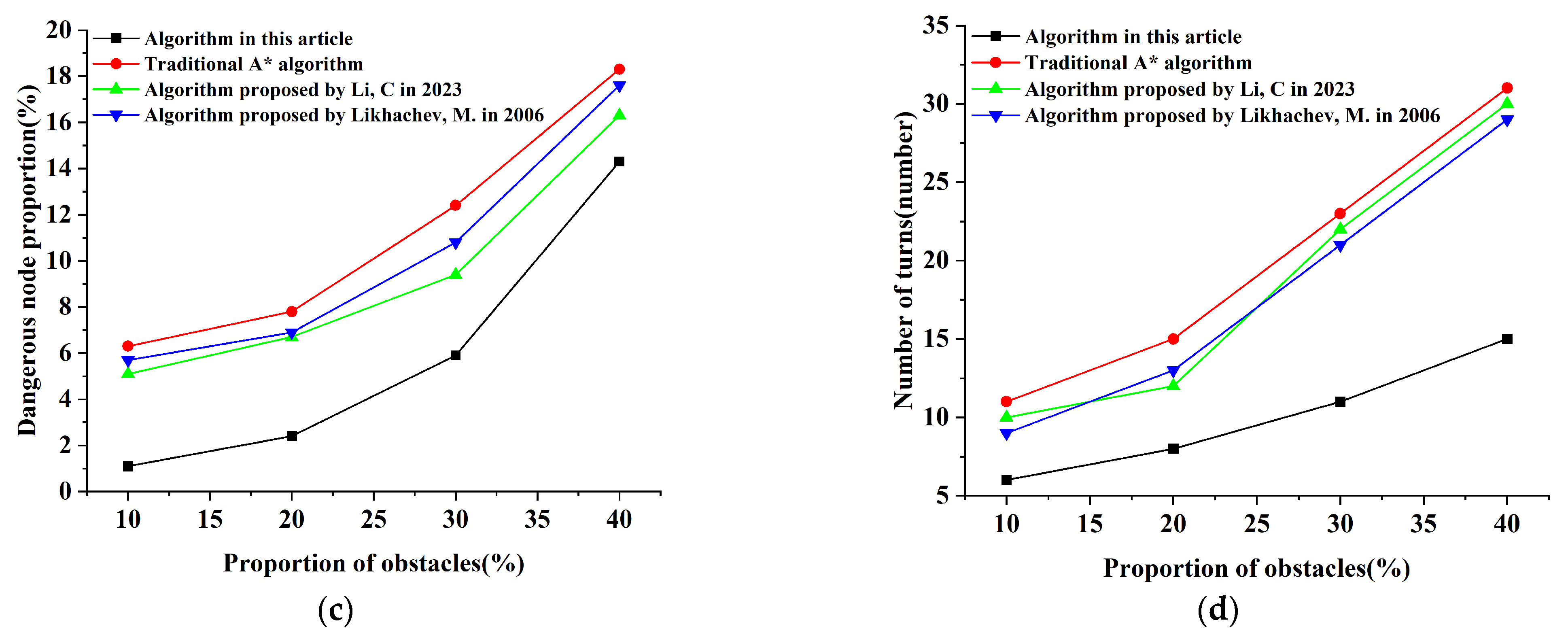
4.2.3. Simulation of Different Obstacle Ratios
5. Conclusions
- (1)
- By setting different parameters for the radius of the outer circle between the robot and the obstacle, we obtained a reasonable range for dividing the danger zone and safety zone between the robot and the obstacle and constructed a CPGM. Compared with other grid map construction methods, this map contains collision probability information, which improves the safety for subsequent path planning.
- (2)
- The path planned by the method used in this study will not be close to the edge or endpoint of the obstacle, and the length of the planned path will be shorter than the other three algorithms, with less search time and smoother paths, greatly improving the safety of the paths planned by the algorithm. This is because we add collision probability values into the actual cost function of the traditional A* algorithm, so that every time we search for the node with the lowest cost, the collision probability is also minimized.
- (1)
- Our method is only applicable to static mobile robot navigation scenarios and cannot avoid dynamic obstacles. Therefore, how to plan a safer, more efficient, and more path-optimized path in dynamic and complex obstacle environments will be the focus of our next research.
- (2)
- Our method still needs to be improved in terms of running speed. We will improve the running speed of our algorithm in the future by ensuring that we can plan more secure paths.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Buniyamin, N. Ant colony system for robot path planning in global static environment. In Proceedings of the 9th WSEAS International Conference on System Science and Simulation in Engineering, Stevens Point, WI, USA, 4–6 October 2010; pp. 192–197. [Google Scholar]
- Chunhui, Z.; Green, R. Vision-based autonomous navigation in indoor environments. In Proceedings of the 25th International Conference of Image and Vision Computing New Zealand, Queenstown, New Zealand, 8–9 November 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Sariff, N.; Buniyamin, N. An Overview of Autonomous Mobile Robot Path Planning Algorithms. In Proceedings of the 2006 4th Student Conference on Research and Development, Shah Alam, Malaysia, 27–28 June 2006; pp. 183–188. [Google Scholar] [CrossRef]
- Li, Y.; Ma, S. Navigation of Apple Tree Pruning Robot Based on Improved RRT-Connect Algorithm. Agriculture 2023, 13, 1495. [Google Scholar] [CrossRef]
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. Heuristic approaches in robot path planning: A survey. Robot. Auton. Syst. 2016, 86, 13–28. [Google Scholar] [CrossRef]
- Thrun, S. Learning metric-topological maps for indoor mobile robot navigation. Artif. Intell. 1998, 99, 21–71. [Google Scholar] [CrossRef]
- Guivant, J.; Nebot, E.; Nieto, J.; Masson, F. Navigation and mapping in large unstructured environments. Int. J. Robot. Res. 2004, 23, 449–472. [Google Scholar] [CrossRef]
- Lau, B.; Sprunk, C.; Burgard, W. Efficient grid-based spatial representations for robot navigation in dynamic environments. Robot. Auton. Syst. 2013, 61, 1116–1130. [Google Scholar] [CrossRef]
- Wang, K.; Xu, J.; Song, K.; Yan, Y.; Peng, Y. Informed anytime Bi-directional Fast Marching Tree for optimal motion planning in complex cluttered environments. Expert Syst. Appl. 2023, 215, 119263. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A Note on Two Problems in Connexion with Graphs. In Edsger Wybe Dijkstra: His Life, Work, and Legacy; Association for Computing Machinery: New York, NY, USA, 2022; Volume 45, pp. 287–290. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Bozek, P.; Karavaev, Y.L.; Ardentov, A.A.; Yefremov, K.S. Neural network control of a wheeled mobile robot based on optimal trajectories. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420916077. [Google Scholar] [CrossRef]
- Liu, X.; Wang, W.; Li, X.; Liu, F.; He, Z.; Yao, Y.; Ruan, H.; Zhang, T. MPC-based high-speed trajectory tracking for 4WIS robot. ISA Trans. 2022, 123, 413–424. [Google Scholar] [CrossRef]
- Zahid, T.; Kausar, Z.; Shah, M.F.; Saeed, M.T.; Pan, J. An Intelligent Hybrid Control to Enhance Applicability of Mobile Robots in Cluttered Environments. IEEE Access 2021, 9, 50151–50162. [Google Scholar] [CrossRef]
- Alireza, M.; Vincent, D.; Tony, W. Experimental study of path planning problem using EMCOA for a holonomic mobile robot. J. Syst. Eng. Electron. 2021, 32, 1450–1462. [Google Scholar] [CrossRef]
- Ali, H.; Gong, D.; Wang, M.; Dai, X. Path planning of mobile robot with improved ant colony algorithm and MDP to produce smooth trajectory in grid-based environment. Front. Neurorobotics 2020, 14, 44. [Google Scholar] [CrossRef] [PubMed]
- Tang, G.; Tang, C.; Claramunt, C.; Hu, X.; Zhou, P. Geometric A-Star Algorithm: An Improved A-Star Algorithm for AGV Path Planning in a Port Environment. IEEE Access 2021, 9, 59196–59210. [Google Scholar] [CrossRef]
- Zheng, T.; Xu, Y.; Zheng, D. AGV Path Planning based on Improved A-star Algorithm. In Proceedings of the 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; pp. 1534–1538. [Google Scholar] [CrossRef]
- Erke, S.; Bin, D.; Yiming, N.; Qi, Z.; Liang, X.; Dawei, Z. An improved A-Star based path planning algorithm for autonomous land vehicles. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420962263. [Google Scholar] [CrossRef]
- Zhang, Z.; Wan, Y.; Wang, Y.; Guan, X.; Ren, W.; Li, G. Improved hybrid A* path planning method for spherical mobile robot based on pendulum. Int. J. Adv. Robot. Syst. 2021, 18, 1729881421992958. [Google Scholar] [CrossRef]
- Ge, H.; Ying, Z.; Chen, Z.; Zu, W.; Liu, C.; Jin, Y. Improved A* Algorithm for Path Planning of Spherical Robot Considering Energy Consumption. Sensors 2023, 23, 7115. [Google Scholar] [CrossRef] [PubMed]
- Huang, B.; Wu, Q.; Zhan, F.B. A shortest path algorithm with novel heuristics for dynamic transportation networks. Int. J. Geogr. Inf. Sci. 2007, 21, 625–644. [Google Scholar] [CrossRef]
- Martins, O.O.; Adekunle, A.A.; Olaniyan, O.M.; Bolaji, B.O. An Improved multi-objective a-star algorithm for path planning in a large workspace: Design, Implementation, and Evaluation. Sci. Afr. 2022, 15, e01068. [Google Scholar] [CrossRef]
- Hong, Y.; Kim, S.; Kim, Y.; Cha, J. Quadrotor path planning using A* search algorithm and minimum snap trajectory generation. ETRI J. 2021, 43, 1013–1023. [Google Scholar] [CrossRef]
- Lima, J.; Costa, P.; Costa, P.; Eckert, L.; Piardi, L.; Moreira, A.P.; Nakano, A. A* search algorithm optimization path planning in mobile robots scenarios. AIP Conf. Proc. 2019, 2116, 220005. [Google Scholar] [CrossRef]
- Yue, G.; Zhang, M.; Shen, C.; Guan, X. Bi-directional smooth A-star algorithm for navigation planning of mobile robots. Sci. Sin. Technol. 2021, 51, 459–468. [Google Scholar] [CrossRef]
- Hui, Q.; Cheng, J. Motion planning for AmigoBot with line-segment-based map and Voronoi diagram. In Proceedings of the 2016 Annual IEEE Systems Conference (SysCon), Orlando, FL, USA, 18–21 April 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Habib, N.; Purwanto, D.; Soeprijanto, A. Mobile robot motion planning by point to point based on modified ant colony optimization and Voronoi diagram. In Proceedings of the 2016 International Seminar on Intelligent Technology and Its Applications (ISITIA), Lombok, Indonesia, 28–30 July 2016; pp. 613–618. [Google Scholar] [CrossRef]
- Zheng, X.; Tu, X.; Yang, Q. Improved JPS Algorithm Using New Jump Point for Path Planning of Mobile Robot. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 2463–2468. [Google Scholar] [CrossRef]
- Chi, W.; Ding, Z.; Wang, J.; Chen, G.; Sun, L. A Generalized Voronoi Diagram-Based Efficient Heuristic Path Planning Method for RRTs in Mobile Robots. IEEE Trans. Ind. Electron. 2022, 69, 4926–4937. [Google Scholar] [CrossRef]
- Jo, J.H.; Moon, C.-B. Learning Collision Situation to Convolutional Neural Network Using Collision Grid Map Based on Probability Scheme. Appl. Sci. 2020, 10, 617. [Google Scholar] [CrossRef]
- Li, M.; Qiao, L.; Jiang, J. A Multigoal Path-Planning Approach for Explosive Ordnance Disposal Robots Based on Bidirectional Dynamic Weighted-A* and Learn Memory-Swap Sequence PSO Algorithm. Symmetry 2023, 15, 1052. [Google Scholar] [CrossRef]
- Zhang, H.; Tao, Y.; Zhu, W. Global Path Planning of Unmanned Surface Vehicle Based on Improved A-Star Algorithm. Sensors 2023, 23, 6647. [Google Scholar] [CrossRef] [PubMed]
- Jinfeng, L.; Jianwei, M.; Xiaojing, L. Indoor Robot Path Planning Based on an Improved Probabilistic Road Map Method. In Proceedings of the 2019 8th International Conference on Networks, Communication and Computing, Luoyang, China, 13–15 December 2019; pp. 244–247. [Google Scholar] [CrossRef]
- Liu, L.; Wang, B.; Xu, H. Research on Path-Planning Algorithm Integrating Optimization A-Star Algorithm and Artificial Potential Field Method. Electronics 2022, 11, 3660. [Google Scholar] [CrossRef]
- Li, J.; Liao, C.; Zhang, W.; Fu, H.; Fu, S. UAV Path Planning Model Based on R5DOS Model Improved A-Star Algorithm. Appl. Sci. 2022, 12, 11338. [Google Scholar] [CrossRef]
- Li, C.; Huang, X.; Ding, J.; Song, K.; Lu, S. Global path planning based on a bidirectional alternating search A* algorithm for mobile robots. Comput. Ind. Eng. 2022, 168, 108123. [Google Scholar] [CrossRef]
- Likhachev, M.; Gordon, G.J.; Thrun, S. ARA*: Anytime A* with provable bounds on sub-optimality. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 8–13 December 2003; Volume 16. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Different Algorithms | Path Length (cm) | Algorithm Time (s) | Dangerous Node Proportion (%) | Number of Turns (Number) |
|---|---|---|---|---|
| Traditional A* algorithm | 38.62 | 0.12453 | 7.8 | 15 |
| Algorithm in this article (, ) | 30.75 | 0.09630 | 4.3 | 11 |
| Algorithm in this article (, ) | 31.08 | 0.10361 | 2.4 | 8 |
| Algorithm in this article (, ) | 33.43 | 0.11497 | 2.1 | 9 |
| Different Algorithms | Path Length (cm) | Algorithm Time (s) | Dangerous Node Proportion (%) | Number of Turns (Number) |
|---|---|---|---|---|
| Traditional A* algorithm | 38.62 | 0.12453 | 7.8 | 15 |
| Reference [37] algorithm | 33.26 | 0.11004 | 6.7 | 12 |
| Reference [38] algorithm | 36.47 | 0.11046 | 6.9 | 13 |
| Algorithm in this article | 31.08 | 0.10361 | 2.4 | 8 |
| Different Algorithms | Proportion of Different Obstacles (%) | Path Length (cm) | Algorithm Time (s) | Dangerous Node Proportion (%) | Number of Turns (Number) |
|---|---|---|---|---|---|
| Traditional A* algorithm | p = 10% | 34.57 | 0.08761 | 6.3 | 11 |
| p = 20% | 38.62 | 0.12453 | 7.8 | 15 | |
| p = 30% | 45.18 | 0.27164 | 12.4 | 23 | |
| p = 40% | 50.09 | 0.38542 | 18.3 | 31 | |
| Reference [37] algorithm | p = 10% | 30.81 | 0.07732 | 5.1 | 10 |
| p = 20% | 33.26 | 0.11004 | 6.7 | 12 | |
| p = 30% | 38.07 | 0.26458 | 9.4 | 22 | |
| p = 40% | 45.93 | 0.37946 | 16.3 | 30 | |
| Reference [38] algorithm | p = 10% | 33.19 | 0.08845 | 5.7 | 9 |
| p = 20% | 36.47 | 0.11046 | 6.9 | 13 | |
| p = 30% | 44.84 | 0.25431 | 10.8 | 21 | |
| p = 40% | 49.33 | 0.33546 | 17.6 | 29 | |
| Algorithm in this article | p = 10% | 30.05 | 0.06213 | 1.1 | 6 |
| p = 20% | 31.08 | 0.10361 | 2.4 | 8 | |
| p = 30% | 34.16 | 0.24687 | 5.9 | 11 | |
| p = 40% | 41.67 | 0.33418 | 14.3 | 15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Tang, W.; Zhang, D.; Fan, D.; Jiang, J.; Lu, Y. Map Construction and Path Planning Method for Mobile Robots Based on Collision Probability Model. Symmetry 2023, 15, 1891. https://doi.org/10.3390/sym15101891
Li J, Tang W, Zhang D, Fan D, Jiang J, Lu Y. Map Construction and Path Planning Method for Mobile Robots Based on Collision Probability Model. Symmetry. 2023; 15(10):1891. https://doi.org/10.3390/sym15101891
Chicago/Turabian StyleLi, Jingwen, Wenkang Tang, Dan Zhang, Dayong Fan, Jianwu Jiang, and Yanling Lu. 2023. "Map Construction and Path Planning Method for Mobile Robots Based on Collision Probability Model" Symmetry 15, no. 10: 1891. https://doi.org/10.3390/sym15101891
APA StyleLi, J., Tang, W., Zhang, D., Fan, D., Jiang, J., & Lu, Y. (2023). Map Construction and Path Planning Method for Mobile Robots Based on Collision Probability Model. Symmetry, 15(10), 1891. https://doi.org/10.3390/sym15101891