




Extinction and Ergodic Stationary Distribution of COVID-19 Epidemic Model with Vaccination Effects


Abstract
:1. Introduction
2. Models Formulation
3. The Qualitative Analysis for the Positive Solution
4. Extinction
5. Extinction
6. The Stationary Distribution of the Disease
Stationary Distribution
- 1.
- In both sides, open input U and in its neighbor, the smallest eigenvalue of A(t) has bounds that are separate.
- 2.
- If the average time τ (at which a curve starts from x going to the set U) is of finiteness, and for every compact subset . Next, if is an integrating function having measurement π, then
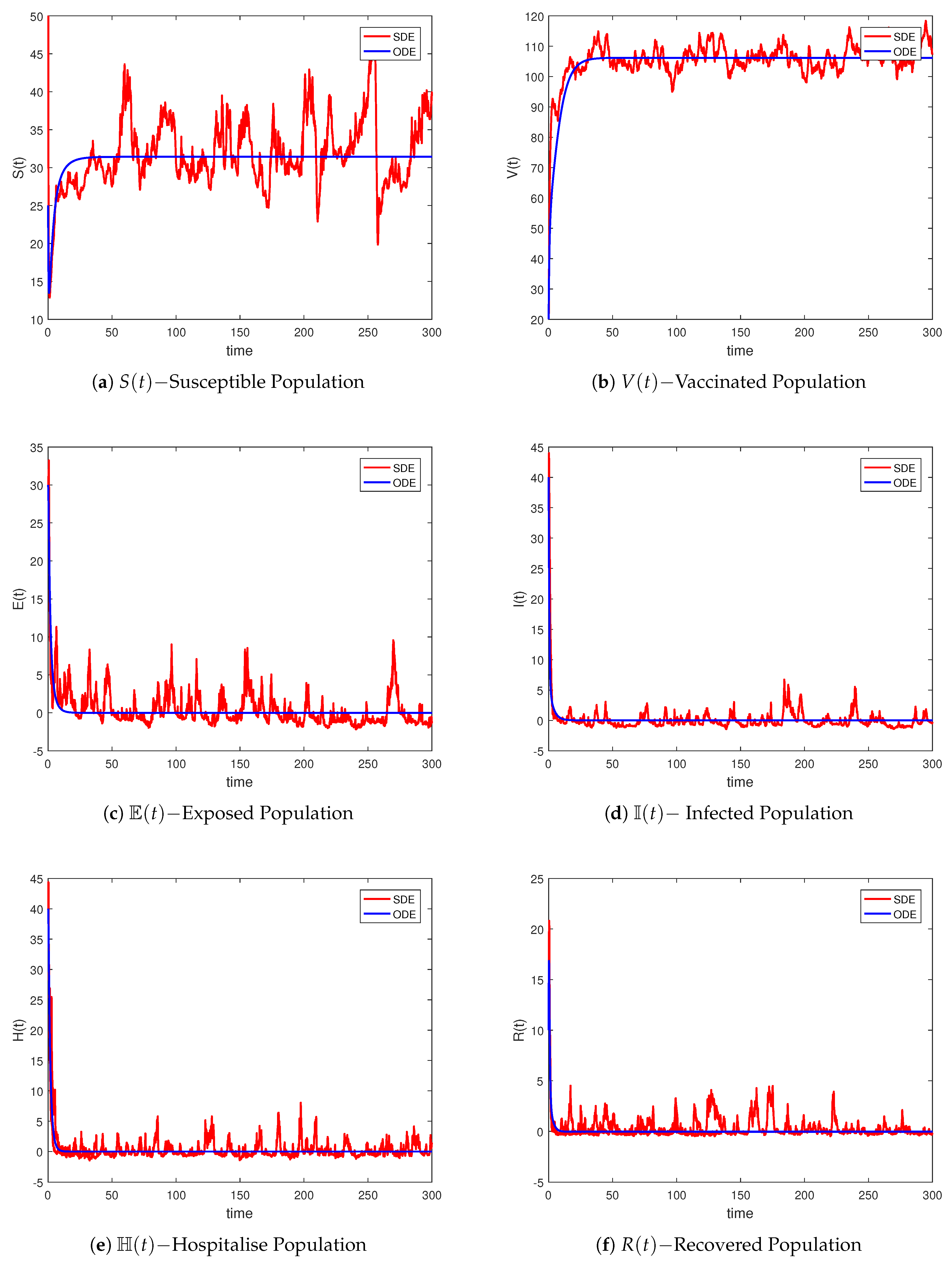
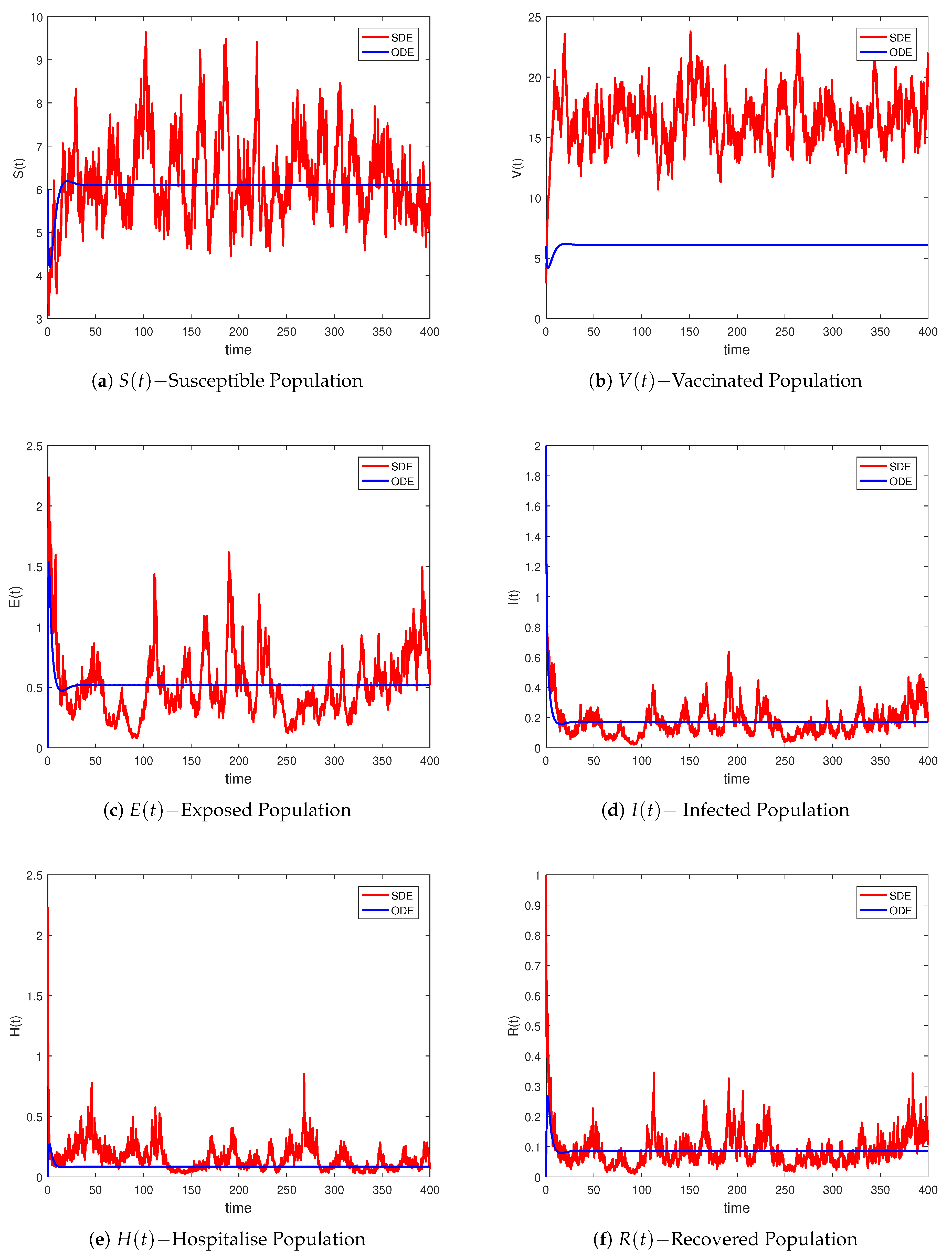
7. Numerical Simulations
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, C.; Wang, Y.; Li, X.; Ren, L.; Zhao, J.; Hu, Y.; Zhang, L. Clinical features of patients infected with 2019 novel coronavirus in Wuhan, China. Lancet 2020, 395, 497–506. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ding, Y.; Jiao, J.; Zhang, Q.; Zhang, Y.; Ren, X. Stationary Distribution and Extinction in a Stochastic SIQR Epidemic Model Incorporating Media Coverage and Markovian Switching. Symmetry 2021, 13, 1122. [Google Scholar] [CrossRef]
- Atangana, A. Modelling the spread of COVID-19 with new fractal-fractional operators: Can the lockdown save mankind before vaccination? Chaos Solitons Fractals 2020, 136, 109860. [Google Scholar] [CrossRef] [PubMed]
- Tul, A.Q.; Anjum, N.; Zeb, A.; Djilali, S.; Khan, Z.A. On the analysis of Caputo fractional order dynamics of Middle East Lungs Coronavirus (MERS-CoV) model. Alex. Eng. J. 2022, 61, 5123–5131. [Google Scholar]
- Ali, I.; Khan, S.U. Threshold of Stochastic SIRS Epidemic Model from Infectious to Susceptible Class with Saturated Incidence Rate Using Spectral Method. Symmetry 2022, 14, 1838. [Google Scholar] [CrossRef]
- Anwarud, D.; Li, Y.; Shah, M.A. The complex dynamics of hepatitis B infected individuals with optimal control. J. Syst. Sci. Complex. 2021, 34, 1301–1323. [Google Scholar]
- Allen, L.J.S. An introduction to stochastic epidemic models. In Mathematical Epidemiology; Springer: Berlin/Heidelberg, Germany, 2008; pp. 81–130. [Google Scholar]
- Lei, Q.; Yang, Z. Dynamical behaviours of a stochastic SIRI epidemic model. Appl. Anal. 2016, 96, 1–13. [Google Scholar]
- Özdemir, N.; Agrawal, O.P.; Karadeniz, D.; İskender, B.B. Fractional optimal control problem of an axis-symmetric diffusion-wave propagation. Phys. Scr. 2009, T136, 014024. [Google Scholar] [CrossRef]
- Din, A.; Yassine, S. Long-term bifurcation and stochastic optimal control of a triple-delayed Ebola illness model with vaccination and quarantine strategies. Fractal Fract. 2022, 6, 578. [Google Scholar] [CrossRef]
- Khan, A.; Yassine, S. Stochastic modeling of the Monkeypox 2022 epidemic with cross-infection hypothesis in a highly disturbed environment. Math. Biosci. Eng. 2022, 19, 13560–13581. [Google Scholar] [CrossRef] [PubMed]
- Din, A.; Li, Y.; Tahir, K.; Gul, Z. Mathematical analysis of spread and control of the novel corona virus (COVID-19) in China. Chaos Solitons Fractals 2020, 141, 110286. [Google Scholar] [CrossRef] [PubMed]
- Din, A.; Li, Y.; Abdullahi, Y. Delayed hepatitis B epidemic model with stochastic analysis. Chaos Solitons Fractals 2021, 146, 110839. [Google Scholar] [CrossRef]
- Yassine, S.; Khan, A.; Din, A.; Kiouach, D.; Rajasekar, S.P. Determining the global threshold of an epidemic model with general interference function and high-order perturbation. AIMS Math. 2022, 7, 19865–19890. [Google Scholar]
- Alzahrani, E.O.; Khan, M.A. Modeling the dynamics of Hepatitis E with optimal control. Chaos Solitons Fractals 2018, 116, 287–301. [Google Scholar] [CrossRef]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Olver, P.J. Equivalence, Invariants, and Symmetry; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Zhang, T.; Ding, T.; Gao, N.; Song, Y. Dynamical behavior of a stochastic SIRC model for influenza A. Symmetry 2020, 12, 745. [Google Scholar] [CrossRef]
- Gaeta, G.; Rodriguez-Quintero, N. Lie-point symmetries and stochastic differential equations. J. Phys. A Math. Gen. 1999, 32, 8485–8505. [Google Scholar] [CrossRef]
- Gaeta, G. Lie-point symmetries and stochastic differential equations: II. J. Phys. A Math. Gen. 2000, 33, 4883–4902. [Google Scholar] [CrossRef]
- Zhang, X.-B.; Wang, X.-D.; Huo, H. Extinction and stationary distribution of a stochastic SIRS epidemic model with standard incidence rate and partial immunity. Phys. Stat. Mech. Appl. 2019, 531, 121548. [Google Scholar] [CrossRef]
- Din, A.; Saida, A.; Amina, A. A stochastically perturbed co-infection epidemic model for COVID-19 and hepatitis B virus. Nonlinear Dyn. 2022, 28, 1–25. [Google Scholar] [CrossRef] [PubMed]
- Khasminskii, R. Stochastic Stability of Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 66. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Rate of recruitment. | |
| Rate of infection effectively | |
| Vaccinated population in percentage. | |
| effect of Vaccination | |
| Rate of natural death | |
| Rate of sign reported by lab | |
| Recovery rate from | |
| COVID-19 death rate | |
| Transferred rate from to to | |
| COVID-19 death rate | |
| recovered rate of |
| Parameters | Source | ||
|---|---|---|---|
| 1.50 | 3.50 | assumed | |
| 0.02 | 0.30 | assumed | |
| 0.07 | 0.03 | assumed | |
| 0.01 | 0.03 | assumed | |
| 0.01 | 0.05 | assumed | |
| 0.02 | 0.04 | assumed | |
| 0.05 | 0.10 | assumed | |
| 0.35 | 0.20 | assumed | |
| 0.05 | 0.30 | assumed | |
| 0.55 | 0.40 | assumed | |
| 0.15 | 0.50 | assumed | |
| 50.0 | 4.00 | assumed | |
| 20.0 | 3.00 | assumed | |
| 30.0 | 1.00 | assumed | |
| 40.0 | 2.00 | assumed | |
| 40.0 | 2.00 | assumed | |
| 10.0 | 1.00 | assumed | |
| 1.25 | 1.20 | assumed | |
| 1.23 | 1.25 | assumed | |
| 1.35 | 1.15 | assumed | |
| 1.20 | 1.05 | assumed | |
| 1.15 | 1.22 | assumed | |
| 1.10 | 1.15 | assumed |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Batool, H.; Li, W.; Sun, Z. Extinction and Ergodic Stationary Distribution of COVID-19 Epidemic Model with Vaccination Effects. Symmetry 2023, 15, 285. https://doi.org/10.3390/sym15020285
Batool H, Li W, Sun Z. Extinction and Ergodic Stationary Distribution of COVID-19 Epidemic Model with Vaccination Effects. Symmetry. 2023; 15(2):285. https://doi.org/10.3390/sym15020285
Chicago/Turabian StyleBatool, Humera, Weiyu Li, and Zhonggui Sun. 2023. "Extinction and Ergodic Stationary Distribution of COVID-19 Epidemic Model with Vaccination Effects" Symmetry 15, no. 2: 285. https://doi.org/10.3390/sym15020285
APA StyleBatool, H., Li, W., & Sun, Z. (2023). Extinction and Ergodic Stationary Distribution of COVID-19 Epidemic Model with Vaccination Effects. Symmetry, 15(2), 285. https://doi.org/10.3390/sym15020285