
A Method for Solving Time-Fractional Initial Boundary Value Problems of Variable Order
 , , and
, , and
Abstract
:1. Introduction
2. Methodology
2.1. Implicit Finite Difference Scheme
2.2. Discretization
2.3. Development of the Scheme
| Algorithm 1 Fractional Model of Solving Time-Fractional Initial Boundary Value Problems. |
Initialize the coefficient matrix A and right-hand side matrix b with zeros; Calculate ; Initialize Solution; Implicit Scheme; Set ; Calculate the solution for time step ; Store the solution for different values of fractional-order ; Plot the surface solution plot. |
3. Stability Analysis
Stability of the Scheme
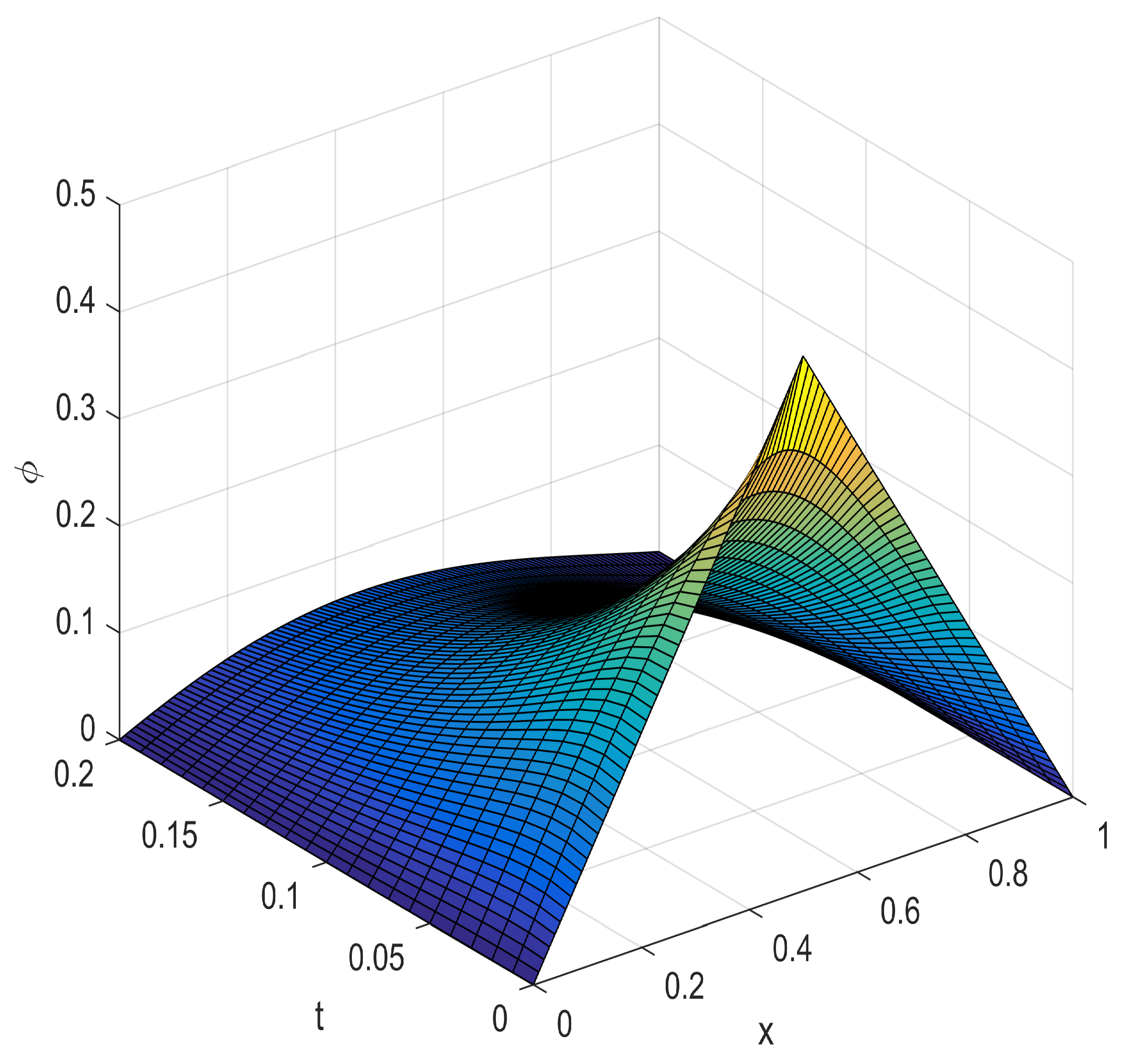
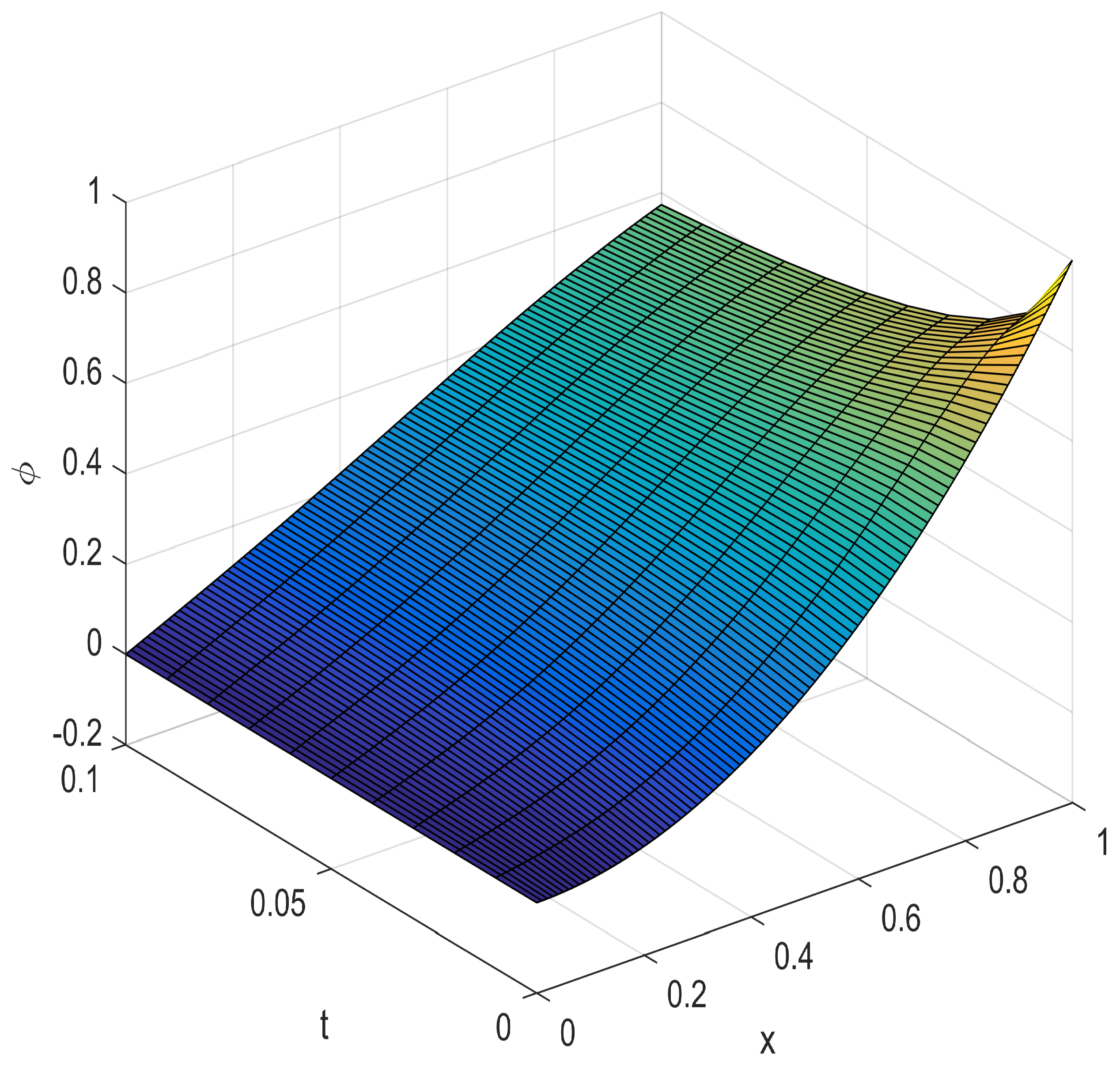
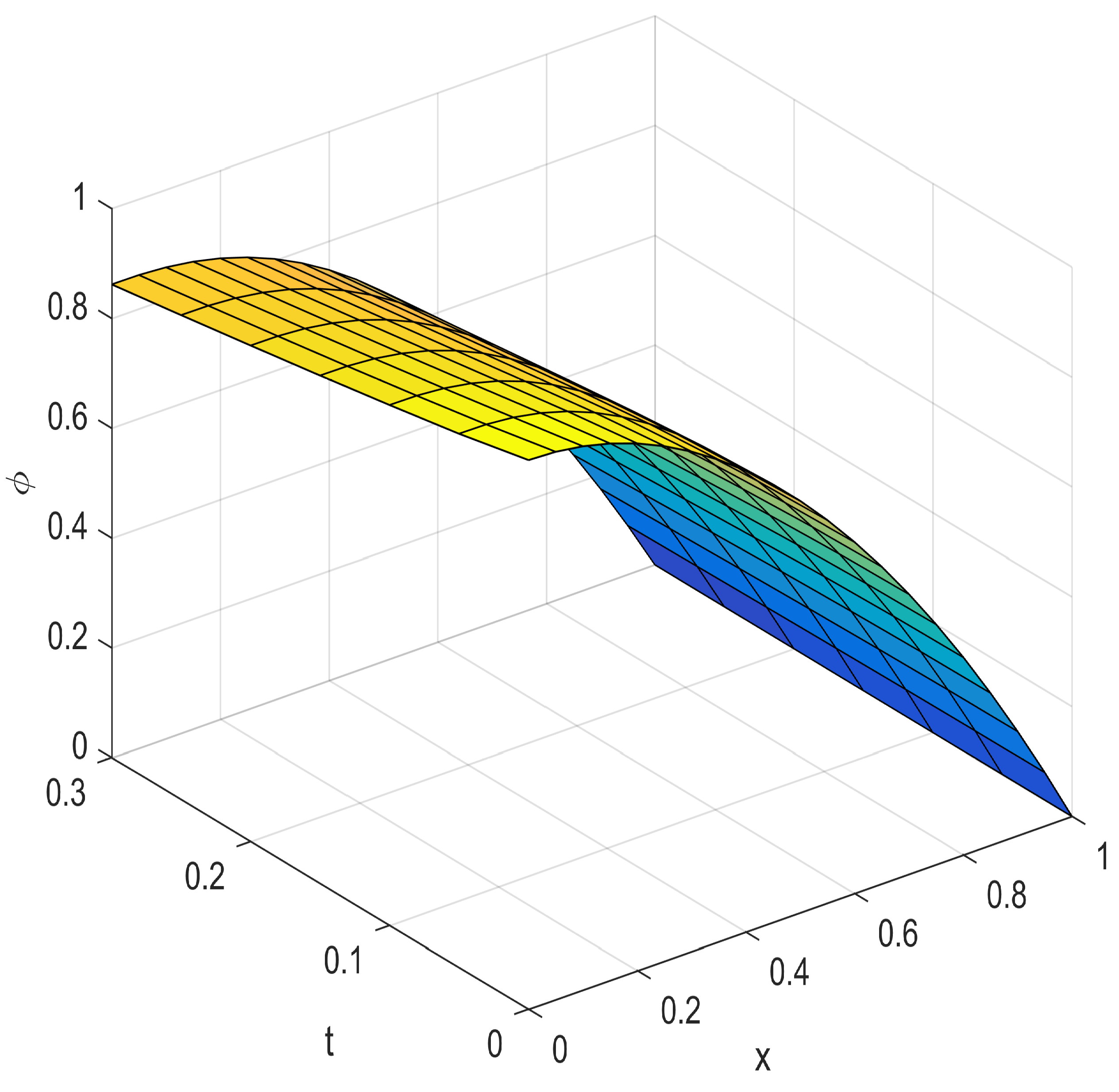
4. Numerical Experiments



5. Conclusions
6. Future Directions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lazarević, M.P.; Rapaić, M.R.; Šekara, T.B.; Mladenov, V.; Mastorakis, N. Introduction to fractional calculus with brief historical background. In Advanced Topics on Applications of Fractional Calculus on Control Problems, System Stability and Modeling; WSEAS Press: Attica, Greece, 2014. [Google Scholar]
- Calcagni, G. Geometry of fractional spaces. Adv. Theor. Math. Phys. 2012, 16, 549–644. [Google Scholar] [CrossRef]
- Sar, E.Y.; Giresunlu, I.B. Fractional differential equations. Pramana J. Phys. 2016, 87. [Google Scholar]
- Klafter, J.; Lim, S.C.; Metzler, R. (Eds.) Fractional Dynamics: Recent Advances; World Scientific: Singapre, 2012. [Google Scholar]
- Tarasov, V.E. On history of mathematical economics: Application of fractional calculus. Mathematics 2019, 7, 509. [Google Scholar] [CrossRef] [Green Version]
- Dalir, M.; Bashour, M. Applications of fractional calculus. Appl. Math. Sci. 2010, 4, 1021–1032. [Google Scholar]
- Wharmby, A.W.; Bagley, R.L. Generalization of a theoretical basis for the application of fractional calculus to viscoelasticity. J. Rheol. 2013, 57, 1429. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, Y.; Baleanu, D.; Chen, W.; Chen, Y. A new collection of real world applications of fractional calculus in science and engineering. Commun. Nonlinear Sci. Numer. Simul. 2018, 64, 213–231. [Google Scholar] [CrossRef]
- Yilmaz, B. A new type electromagnetic curves in optical fiber and rotation of the polarization plane using fractional calculus. Optik 2021, 247, 168026. [Google Scholar] [CrossRef]
- Gonzalez-Lee, M.; Vazquez-Leal, H.; Morales-Mendoza, L.J.; Nakano-Miyatake, M.; Perez-Meana, H.; Laguna-Camacho, J.R. Statistical assessment of discrimination capabilities of a fractional calculus based image watermarking system for Gaussian watermarks. Entropy 2021, 23, 255. [Google Scholar] [CrossRef]
- Valério, D.; Machado, J.T.; Kiryakova, V. Some pioneers of the applications of fractional calculus. Fract. Calc. Appl. Anal. 2014, 17, 552–578. [Google Scholar] [CrossRef] [Green Version]
- Tarasov, V.E. (Ed.) Handbook of Fractional Calculus with Applications; De Gruyter: Berlin, Germany, 2019. [Google Scholar]
- Chávez-Vázquez, S.; Gómez-Aguilar, J.F.; Lavín-Delgado, J.E.; Escobar-Jiménez, R.F.; Olivares-Peregrino, V.H. Applications of fractional operators in robotics: A review. J. Intell. Robot. Syst. 2022, 104, 63. [Google Scholar] [CrossRef]
- Mishra, S.U.; Mishra, L.N.; Mishra, R.K.; Patnaik, S.R. Some applications of fractional calculus in technological development. J. Fract. Calc. Appl. 2019, 10, 228–235. [Google Scholar]
- Ionescu, C.; Lopes, A.; Copot, D.; Machado, J.T.; Bates, J.H. The role of fractional calculus in modeling biological phenomena: A review. Commun. Nonlinear Sci. Numer. Simul. 2017, 51, 141–159. [Google Scholar] [CrossRef]
- Katugampola, U.N. New approach to a generalized fractional integral. Appl. Math. Comput. 2011, 218, 860–865. [Google Scholar] [CrossRef]
- Ross, B. The development of fractional calculus 1695–1900. Hist. Math. 1977, 4, 75–89. [Google Scholar] [CrossRef] [Green Version]
- Baleanu, D.; Diethelm, K.; Scalas, E.; Trujillo, J.J. Fractional Calculus: Models and Numerical Methods; World Scientific: London, UK, 2012. [Google Scholar]
- Chen, C.; Liu, F.; Burrage, K. Finite difference methods and a Fourier analysis for the fractional reaction–subdiffusion equation. Appl. Math. Comput. 2008, 198, 754–769. [Google Scholar] [CrossRef] [Green Version]
- Birajdar, G.A.; Dhaigude, D.B. An implicit numerical method for semi-linear fractional diffusion equation. In Proceedings of the International Conference on Mathematical Sciences, Chennai, India, 17–19 July 2014. [Google Scholar]
- Zhang, H.M.; Liu, F. Numerical simulation of the Riesz fractional diffusion equation with a nonlinear source term. J. Appl. Math. Comput. 2008, 26, 1–14. [Google Scholar]
- Liu, F.; Shen, S.; Anh, V.; Turner, I. Analysis of a discrete non-Markovian random walk approximation for the time-fractional diffusion equation. Anziam J. 2004, 46, C488–C504. [Google Scholar] [CrossRef]
- Lin, Y.; Xu, C. Finite difference/spectral approximations for the time-fractional diffusion equation. J. Comput. Phys. 2007, 225, 1533–1552. [Google Scholar] [CrossRef]
- Zhuang, P.; Liu, F. Implicit difference approximation for the two-dimensional space-time-fractional diffusion equation. J. Appl. Math. Comput. 2007, 25, 269–282. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, P.; Liu, F.; Anh, V.; Turner, I. New solution and analytical techniques of the implicit numerical method for the anomalous subdiffusion equation. Siam J. Numer. Anal. 2008, 46, 1079–1095. [Google Scholar] [CrossRef] [Green Version]
- Murio, D.A. Implicit finite difference approximation for time-fractional diffusion equations. Comput. Math. Appl. 2008, 56, 1138–1145. [Google Scholar] [CrossRef]
- Sweilam, N.H.; Khader, M.M.; Mahdy, A.M. Crank-Nicolson finite difference method for solving time-fractional diffusion equation. J. Fract. Calc. Appl. 2012, 2, 1–9. [Google Scholar]
- Birajdar, G.A. Stability of nonlinear fractional diffusion equation. Lib. Math. 2016, 36, 1–12. [Google Scholar]
- Dhaigude, D.B.; Birajdar, G.A.; Nikam, V.R. Adomain decomposition method for fractional Benjamin-Bona-Mahony-Burger’s equations. Int. J. Appl. Math. Mech. 2012, 8, 42–51. [Google Scholar]
- Dhaigude, D.B.; Birajdar, G.A. Numerical solution of system of fractional partial differential equations by discrete Adomian decomposition method. J. Frac. Cal. Appl. 2012, 3, 1–11. [Google Scholar]
- Dhaigude, D.B.; Birajdar, G.A. Numerical solution of fractional partial differential equations by discrete Adomian decomposition method. Adv. Appl. Math. Mech. 2014, 6, 107–119. [Google Scholar] [CrossRef]
- Mehmood, Y.; Shafqat, R.; Sarris, I.E.; Bilal, M.; Sajid, T.; Akhtar, T. Numerical Investigation of MWCNT and SWCNT Fluid Flow along with the Activation Energy Effects over Quartic Auto Catalytic Endothermic and Exothermic Chemical Reactions. Mathematics 2022, 10, 4636. [Google Scholar] [CrossRef]
- Boulares, H.; Benchaabane, A.; Pakkaranang, N.; Shafqat, R.; Panyanak, B. Qualitative properties of positive solutions of a kind for fractional pantograph problems using technique fixed point theory. Fractal Fract. 2022, 6, 593. [Google Scholar] [CrossRef]
- Abuasbeh, K.; Shafqat, R. Fractional Brownian motion for a system of fuzzy fractional stochastic differential equation. J. Math. 2022, 2022, 3559035. [Google Scholar] [CrossRef]
- Abuasbeh, K.; Shafqat, R.; Alsinai, A.; Awadalla, M. Analysis of Controllability of Fractional Functional Random Integroevolution Equations with Delay. Symmetry 2023, 15, 290. [Google Scholar] [CrossRef]
- Abuasbeh, K.; Shafqat, R.; Alsinai, A.; Awadalla, M. Analysis of the Mathematical Modelling of COVID-19 by Using Mild Solution with Delay Caputo Operator. Symmetry 2023, 15, 286. [Google Scholar] [CrossRef]
- Alnahdi, A.S.; Shafqat, R.; Niazi, A.U.K.; Jeelani, M.B. Pattern Formation Induced by Fuzzy Fractional-Order Model of COVID-19. Axioms 2022, 11, 313. [Google Scholar] [CrossRef]
- Kumar, S.; Kumar, A.; Baleanu, D. Two analytical methods for time-fractional nonlinear coupled Boussinesq–Burger’s equations arise in propagation of shallow water waves. Nonlinear Dyn. 2016, 85, 699–715. [Google Scholar] [CrossRef]
- Lin, R.; Liu, F.; Anh, V.; Turner, I. Stability and convergence of a new explicit finite-difference approximation for the variable-order nonlinear fractional diffusion equation. Appl. Math. Comput. 2009, 212, 435–445. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, P.; Liu, F.; Anh, V.; Turner, I. Numerical methods for the variable-order fractional advection-diffusion equation with a nonlinear source term. Siam J. Numer. Anal. 2009, 47, 1760–1781. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Chen, W.; Chen, Y. Variable-order fractional differential operators in anomalous diffusion modeling. Phys. Stat. Mech. Its Appl. 2009, 388, 4586–4592. [Google Scholar] [CrossRef]
- Chen, C.M.; Liu, F.; Turner, I.; Anh, V.; Chen, Y. Numerical approximation for a variable-order nonlinear reaction–subdiffusion equation. Numer. Algorithms 2013, 63, 265–290. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.M.; Liu, F.; Anh, V.; Turner, I. Numerical methods for solving a two-dimensional variable-order anomalous subdiffusion equation. Math. Comput. 2012, 81, 345–366. [Google Scholar] [CrossRef]
- Sun, H.; Chen, W.; Li, C.; Chen, Y. Finite difference schemes for variable-order time-fractional diffusion equation. Int. J. Bifurc. Chaos 2012, 22, 1250085. [Google Scholar] [CrossRef] [Green Version]
- Diaz, G.; Coimbra, C.F. Nonlinear dynamics and control of a variable-order oscillator with application to the van der Pol equation. Nonlinear Dyn. 2009, 56, 145–157. [Google Scholar] [CrossRef]
- Soon, C.M.; Coimbra, C.F.; Kobayashi, M.H. The variable viscoelasticity oscillator. Ann. Phys. 2005, 14, 378–389. [Google Scholar] [CrossRef]
- Oderinu, R.A.; Owolabi, J.A.; Taiwo, M. Approximate solutions of linear time-fractional differential equations. J. Math. Comput. Sci. 2023, 29, 60–72. [Google Scholar]
- Alia, A.; Abbasb, M.; Akramc, T. New group iterative schemes for solving the two-dimensional anomalous fractional sub-diffusion equation. J. Math. Comput. Sci. 2021, 22, 119–127. [Google Scholar] [CrossRef]
- Guo, T.; Nikan, O.; Avazzadeh, Z.; Qiu, W. Efficient alternating direction implicit numerical approaches for multi-dimensional distributed-order fractional integro differential problems. Comput. Appl. Math. 2022, 41, 236. [Google Scholar] [CrossRef]
- Akram, T.; Abbas, M.; Ali, A. A numerical study on time-fractional Fisher equation using an extended cubic B-spline approximation. J. Math. Comput. Sci. 2021, 22, 85–96. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Techniques | Formulation | Benefits and Drawbacks |
|---|---|---|
| Cubic B-spline approximation for the numerical solution of the time-fractional Fisher equation. | The time-fractional derivative is approximated in Caputo’s sense while the space dimension is calculated using a new extended cubic B-spline. | Unconditionally stable and convergent. Applied to non-linear time-fractional partial differential equation. |
| Efficient ADI numerical methods for multi-dimensional fractional integro-differential problems. | The Riemann–Liouville fractional integral and distributed-order fractional derivative are discretized using the second-order convolution quadrature and weighted Grünwald formula. Spatial discretization is achieved through a centered finite difference technique. | The method is computationally efficient and convergent. Stability of this method is not verified. |
| New group iterative methods developed for solving the two-dimensional sub-diffusion equation with fractional derivatives and specific boundary conditions. | New iterative schemes using a combination of standard and rotated five-point approximations are developed for numerical solution of two-dimensional fractional sub-diffusion equations. | Computationally efficient. Stability analysis of the method is not provided. |
| Approximate solutions of linear time-fractional differential equations. The method is suitable for specific boundary conditions. | The numerical approach for solving linear time-fractional differential equations (of Caputo type) was studied and a theorem was established to demonstrate the Kamal transform of the nth-order Caputo derivatives. | High-accuracy solutions for linear time-fractional differential equations are obtained through the proposed numerical scheme. Stability analysis of the scheme is not provided. The method is only applicable to linear time-fractional differential equations. |
| Proposed | The central finite difference method is used for approximating the second-order spatial derivative and the forward difference for approximating the Caputo derivative of variable order in time. | Applicable to both linear and semi-linear equations. The stability of the scheme is verified. The method is not restricted to specific boundary conditions. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abuasbeh, K.; Kanwal, A.; Shafqat, R.; Taufeeq, B.; Almulla, M.A.; Awadalla, M. A Method for Solving Time-Fractional Initial Boundary Value Problems of Variable Order. Symmetry 2023, 15, 519. https://doi.org/10.3390/sym15020519
Abuasbeh K, Kanwal A, Shafqat R, Taufeeq B, Almulla MA, Awadalla M. A Method for Solving Time-Fractional Initial Boundary Value Problems of Variable Order. Symmetry. 2023; 15(2):519. https://doi.org/10.3390/sym15020519
Chicago/Turabian StyleAbuasbeh, Kinda, Asia Kanwal, Ramsha Shafqat, Bilal Taufeeq, Muna A. Almulla, and Muath Awadalla. 2023. "A Method for Solving Time-Fractional Initial Boundary Value Problems of Variable Order" Symmetry 15, no. 2: 519. https://doi.org/10.3390/sym15020519
APA StyleAbuasbeh, K., Kanwal, A., Shafqat, R., Taufeeq, B., Almulla, M. A., & Awadalla, M. (2023). A Method for Solving Time-Fractional Initial Boundary Value Problems of Variable Order. Symmetry, 15(2), 519. https://doi.org/10.3390/sym15020519