
On the Bifurcations of a 3D Symmetric Dynamical System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The T-System, General Properties
- If is an equilibrium point of the system, then is also an equilibrium point of the system and they have both the same type of stability. The two points are called -conjugated [3] (p. 279). Consequently, twin bifurcations of the -conjugated equilibrium points occur.
- The set is the fixed-point subspace of (2). It is invariant under the flow of the system, so the orbits entirely lie in , or entirely lie outside of .
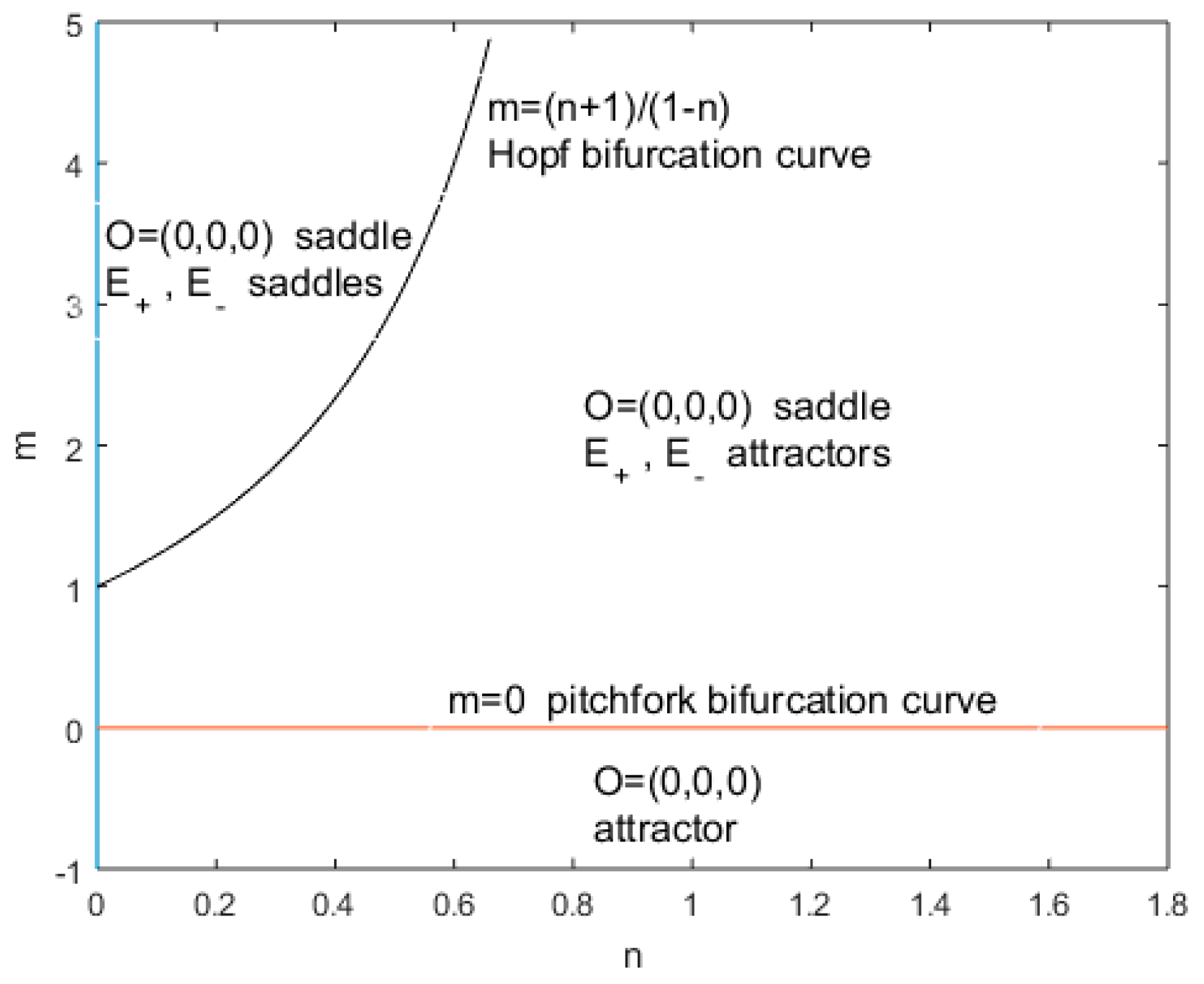
3. Equilibrium Points, Their Stability and Bifurcations
- (a)
- For all eigenvalues of the Jacobian matrix have negative real parts. So is an attractor.
- (b)
- For the eigenvalues are . So is not hyperbolic and , .
- (c)
- For there are three equilibrium points.
- (d)
- For the characteristic polynomial of is . Because it results that is not hyperbolic. □
3.1. The Pitchfork Bifurcation
- (a)
- it is -symmetric, at it has a fixed equilibrium with the simple eigenvalue and the corresponding eigenvector .
- (b)
- the eigenvector belongs to the .
3.2. The Hopf Bifurcation of
4. The Singular Bifurcation
4.1. The Dynamics of the Unperturbed System
4.2. Fast-Slow Oscillations in the Perturbed System
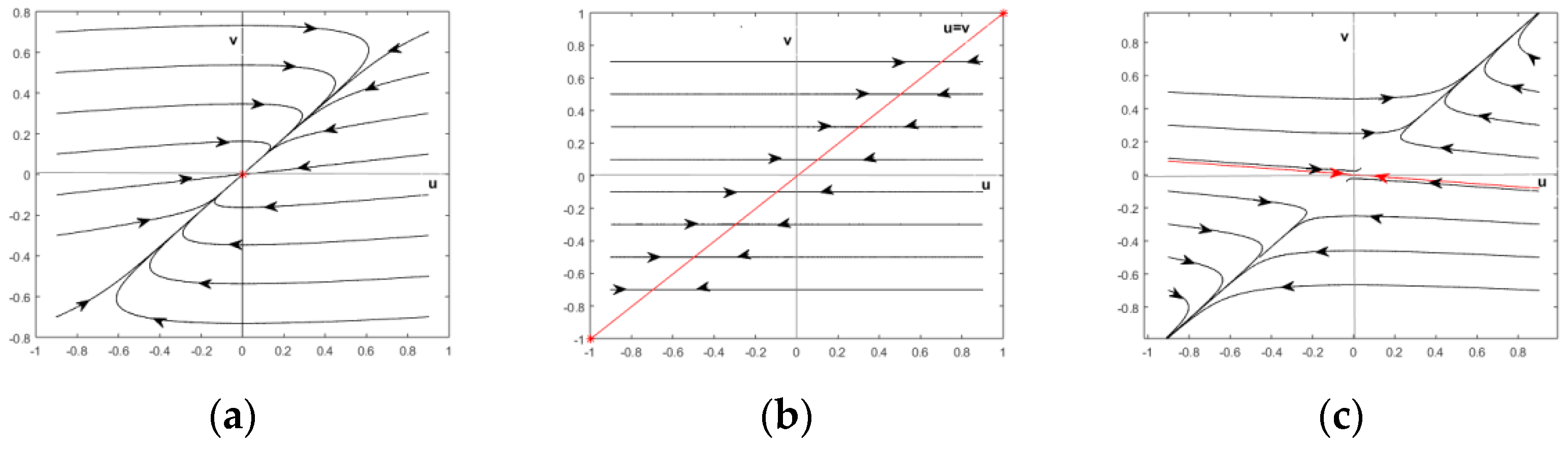
4.2.1. The Dynamics of the Fast Subsystem
- (a)
- The plane is invariant with respect to the flow of (5), for all .
- (b)
- For , is the global attractor for the system (5) restricted to the plane .
- (c)
- For , is a saddle point for the system (5) restricted to the plane . The stable manifold of is and the unstable manifold is where are the solutions of the equation . All orbits starting from the plane are unbounded, excepting those starting from the stable manifold of .
- (d)
- For the line is formed by non-hyperbolic equilibrium points and it is the global attractor of the system (5) restricted to the plane .
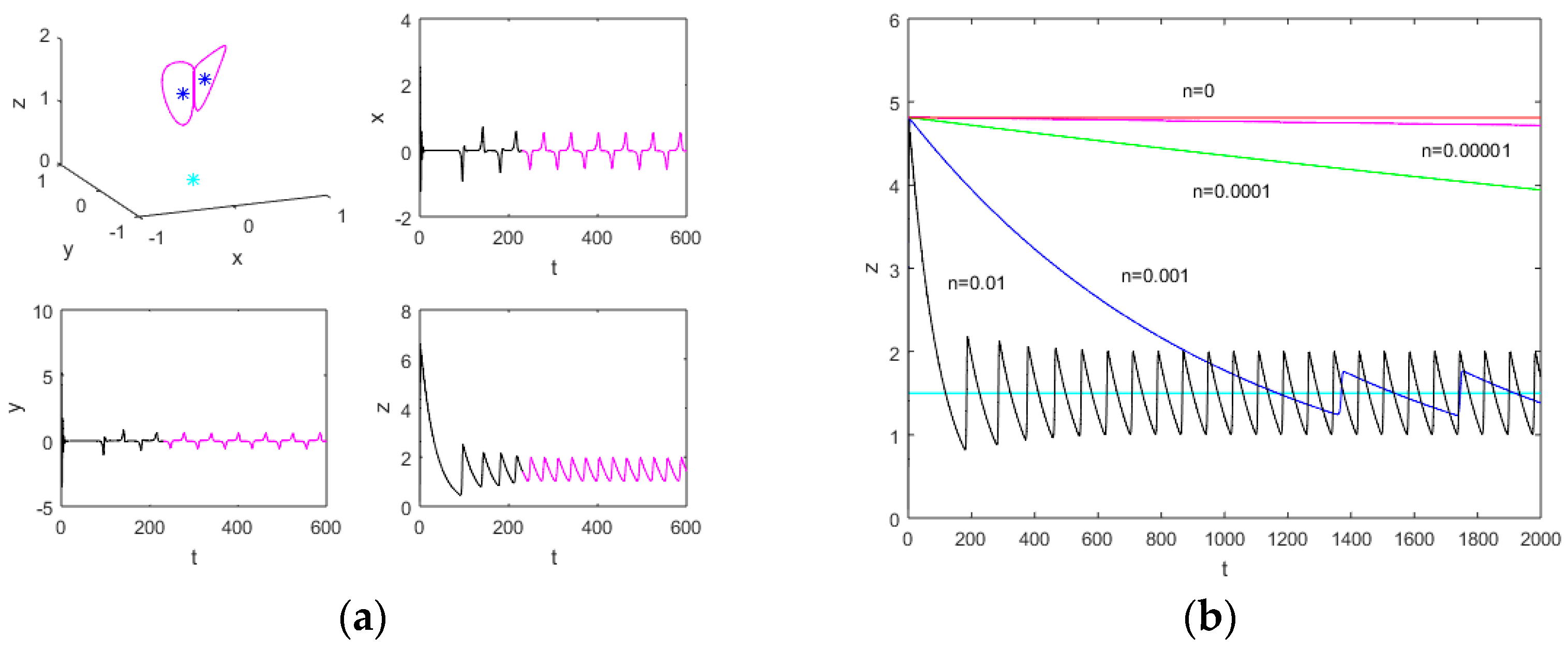
4.2.2. The Dynamics of the Slow Subsystem
4.2.3. The Mechanism of the Fast-Slow Oscillations
4.3. From Stable Equilibria to Fast Slow Oscillations
5. Singularly Perturbed System and Local Bifurcations
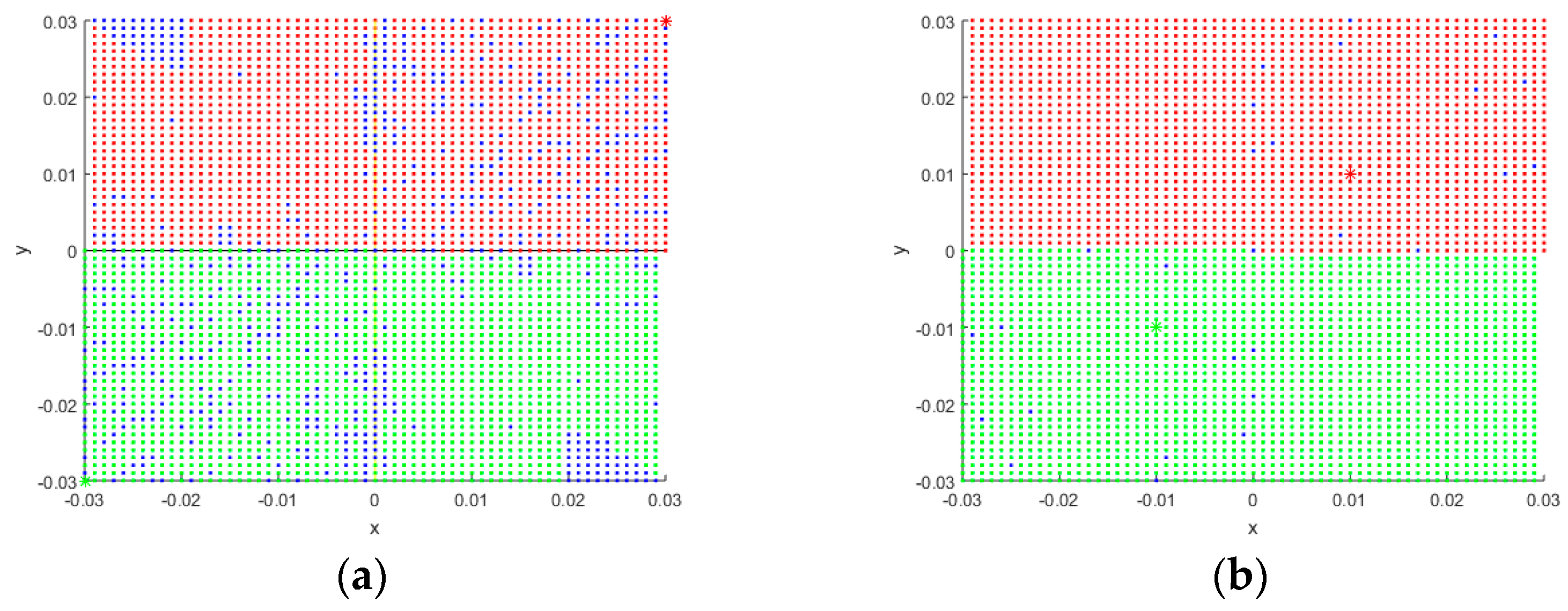
5.1. Singularly Perturbed System and Pitchfork Bifurcation
5.2. Singularly Perturbed System and Hopf bifurcation.
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Tigan, G. Analysis of a dynamical system derived from the Lorenz system. Sci. Bull. Politehnica Univ. Timisoara Tomul. 2005, 50, 61–72. [Google Scholar]
- Golubitsky, M.; Stewart, I. Progress in mathematics from equilibrium to chaos in phase space and physical space. In The Symmetry Perspective; Birkhäuser Verlag: Basel, Switzerland, 2002; Volume 200. [Google Scholar]
- Kusnetsov, Y.A. Elements of Applied Bifurcation Theory; Springer: New York, NY, USA, 1998. [Google Scholar]
- Jafary, S.; Sprott, J.C. Simple chaotic flows with a line equilibrium. Chaos Solitons Fractals 2013, 57, 79–84. [Google Scholar] [CrossRef]
- Pham, V.T.; Jafari, S.; Volos, C.; Kapitaniak, T. A gallery of chaotic systems with an infinite number of equilibrium points. Chaos Solitons Fractals 2016, 93, 58–63. [Google Scholar] [CrossRef]
- Marwan, M.; Tuwankotta, J.M. Infinitely many equilibria and some codimension one bifurcations in a subsystem of a two-preys one predator dynamical system. J. Phys. Conf. Ser. 2019, 1245, 012063. [Google Scholar] [CrossRef]
- Moysis, L.; Volos, C.; Pham, V.T.; Goudos, S.; Stouboulos, I.; Gupta, M.K.; Mishra, V.K. Analysis of a chaotic system with line equilibrium and its application to secure communications using a descriptor observer. Technologies 2019, 7, 76. [Google Scholar] [CrossRef] [Green Version]
- Bao, H.; Ding, R.; Hua, M.; Wu, H.; Chen, B. Initial-Condition Effects on a Two-Memristor-Based Jerk System. Mathematics 2022, 10, 411. [Google Scholar] [CrossRef]
- Chen, B.; Cheng, X.; Bao, H.; Chen, M.; Xu, Q. Extreme Multistability and Its Incremental Integral Reconstruction in a Non-Autonomous Memcapacitive Oscillator. Mathematics 2022, 10, 754. [Google Scholar] [CrossRef]
- Krupa, M.; Szmolyan, P. Relaxation oscillation and canard explosion. J. Differ. Equ. 2001, 174, 312–368. [Google Scholar] [CrossRef] [Green Version]
- Fenichel, N. Geometric Singular Perturbations Theory for Ordinary Differential Equations. J. Differ. Equ. 1979, 31, 53–98. [Google Scholar] [CrossRef] [Green Version]
- Alvarez, M.J.; Ferragut, A.; Jarque, X. A survey on the blow up technique. Int. J. Bifurc. Chaos 2011, 21, 3103–3118. [Google Scholar] [CrossRef] [Green Version]
- De Maesschalck, P.; Schecter, S. The entry-exit function and geometric singular perturbation theory. J. Differ. Equ. 2016, 260, 6697–6715. [Google Scholar] [CrossRef]
- Hsu, T.H.; Ruan, S. Relaxation oscillations and the entry-exit functions in multidimensional slow-fast systems. SIAM J. Math. Anal. 2021, 53, 3717–3758. [Google Scholar] [CrossRef]
- Liu, W. Exchange Lemmas for singular perturbation problems with certains turning points. J. Differ. Equ. 2000, 167, 134–180. [Google Scholar] [CrossRef] [Green Version]
- Van Groder, R.A.; Roy Choudhury, S. Analytical Hopf bifurcation and stability analysis of T-system. Commun. Theor. Phys. 2011, 55, 609–616. [Google Scholar] [CrossRef]
- Tigan, G.; Constantinescu, D. Heteroclinic orbits in T and Lu systems. Chaos Solitons Fractals 2009, 42, 20–23. [Google Scholar] [CrossRef]
- Algaba, A.; Fernandez-Sanchez, F.; Merino, M.; Rodríguez-Luis, A. On Shilnikov analysis on homoclinic and heteroclinic orbits of the T-system. J. Comput. Nonlinear Dyn. 2013, 8, 027001. [Google Scholar] [CrossRef]
- Zhang, R. Bifurcation analysis for T-system with delayed feedback and its applications to control of chaos. Nonlinear Dyn. 2013, 72, 629–641. [Google Scholar] [CrossRef]
- Liu, X.; Hong, L.; Yang, L. Fractional-order complex T-system: Bifurcations, chaos control and synchronization. Nonlinear Dyn. 2014, 75, 589–602. [Google Scholar] [CrossRef]
- Perko, L. Differential Equations and Dynamical Systems; Springer: New York, NY, USA, 2001. [Google Scholar]
- Constantinescu, D.; Tigan, G.; Zhang, X. Coexistence of Chaotic Attractor and Unstable Limit Cycles in a 3D Dynamical System. Available online: https://open-research-europe.ec.europa.eu/articles/1-50/v1 (accessed on 17 May 2021).
- Kuehen, C. Multiple Time Scale Dynamics; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Benoit, E. Linear Dynamic Bifurcation with Noise. In Proceedings of the Dynamic Bifurcations (Luminy, 1990), Lecture Notes in Math. 1493, Luminy, France, 5–10 March 1990; Springer: New York, NY, USA, 1991; pp. 131–150. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Constantinescu, D. On the Bifurcations of a 3D Symmetric Dynamical System. Symmetry 2023, 15, 923. https://doi.org/10.3390/sym15040923
Constantinescu D. On the Bifurcations of a 3D Symmetric Dynamical System. Symmetry. 2023; 15(4):923. https://doi.org/10.3390/sym15040923
Chicago/Turabian StyleConstantinescu, Dana. 2023. "On the Bifurcations of a 3D Symmetric Dynamical System" Symmetry 15, no. 4: 923. https://doi.org/10.3390/sym15040923
APA StyleConstantinescu, D. (2023). On the Bifurcations of a 3D Symmetric Dynamical System. Symmetry, 15(4), 923. https://doi.org/10.3390/sym15040923