The Convergence of Symmetric Discretization Models for Nonlinear Schrödinger Equation in Dark Solitons’ Motion

Abstract
:1. Introduction
2. Different Discretization Models
2.1. The Space-Symmetric Discretization Models
- (1)
- Direct-discrete model (D-D model):
- (2)
- Ablowitz–Ladik model (A-L model):
2.2. The Time–Space Discretization Models
- (1)
- Crank-Nicolson method
- (2)
- New difference method
3. The Convergence of the Space-Symmetric Discretization Models
- (1)
- and exist, and ,
- (2)
- and
- (1)
- .
- (2)
- Suppose that , , and we obtain .
4. The Convergence of the Time–Space Discretization Models
- (1)
- [23];
- (2)
- .
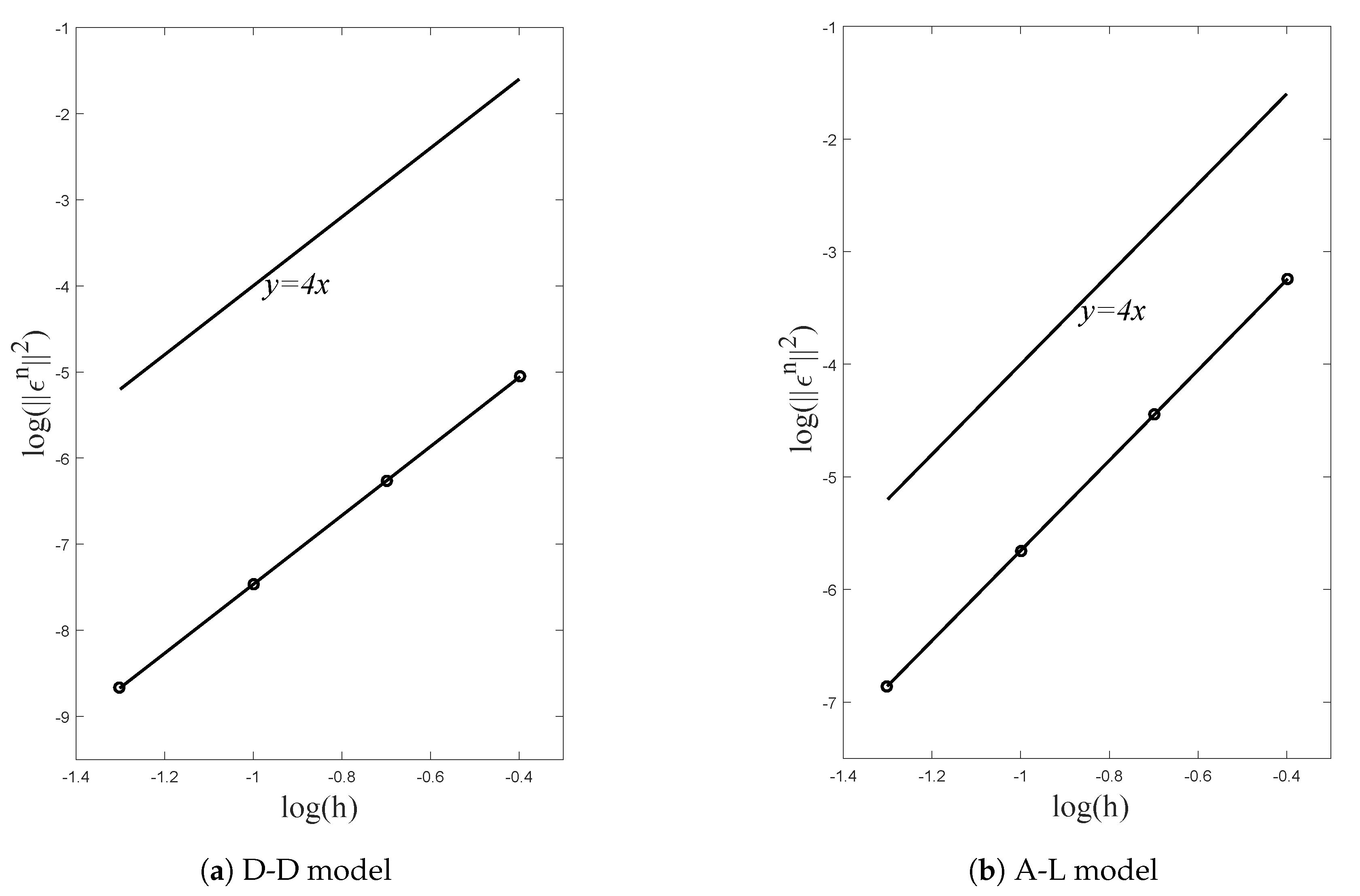
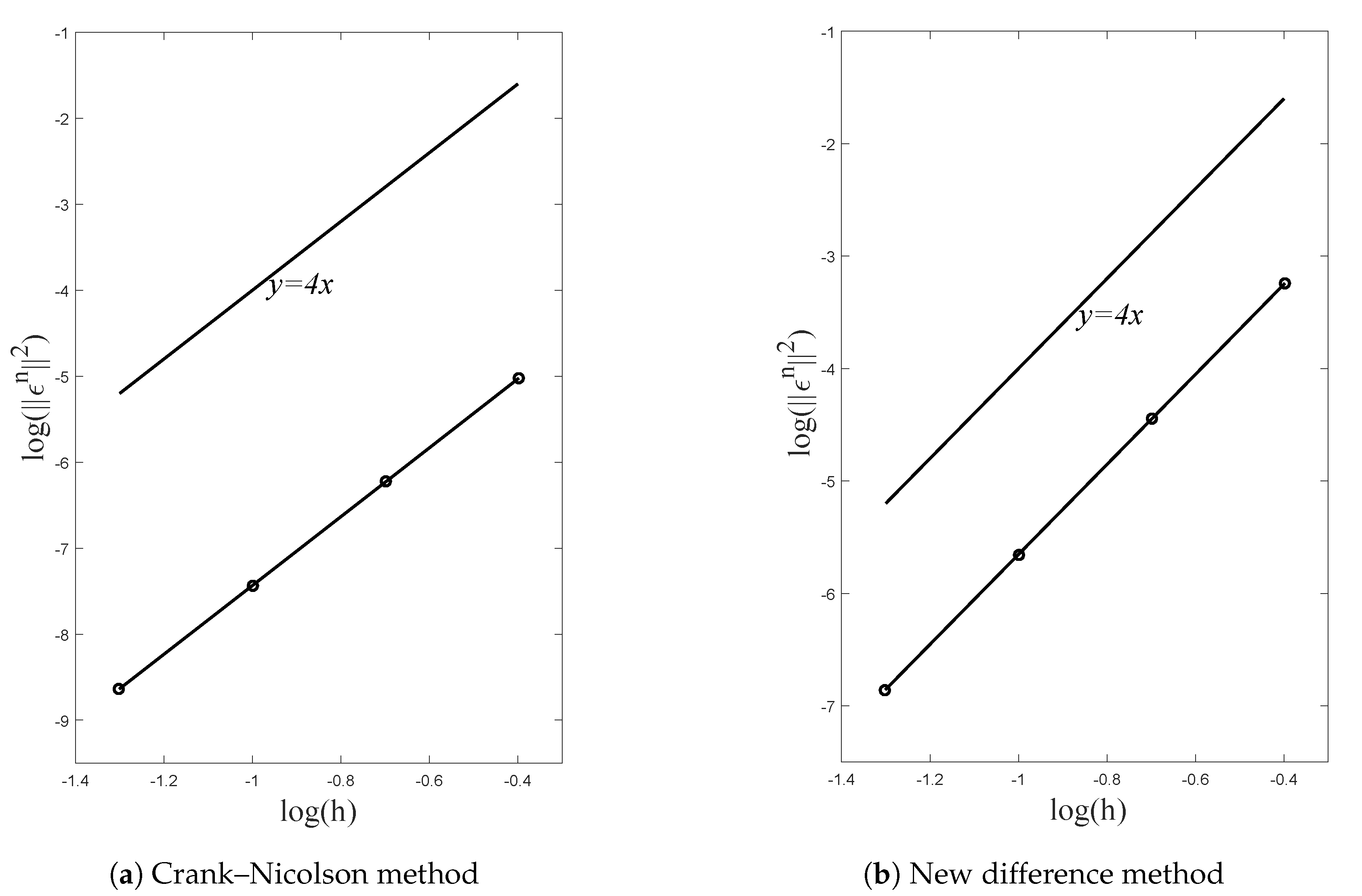
5. Numerical Experiments
5.1. Errors and Convergence Order
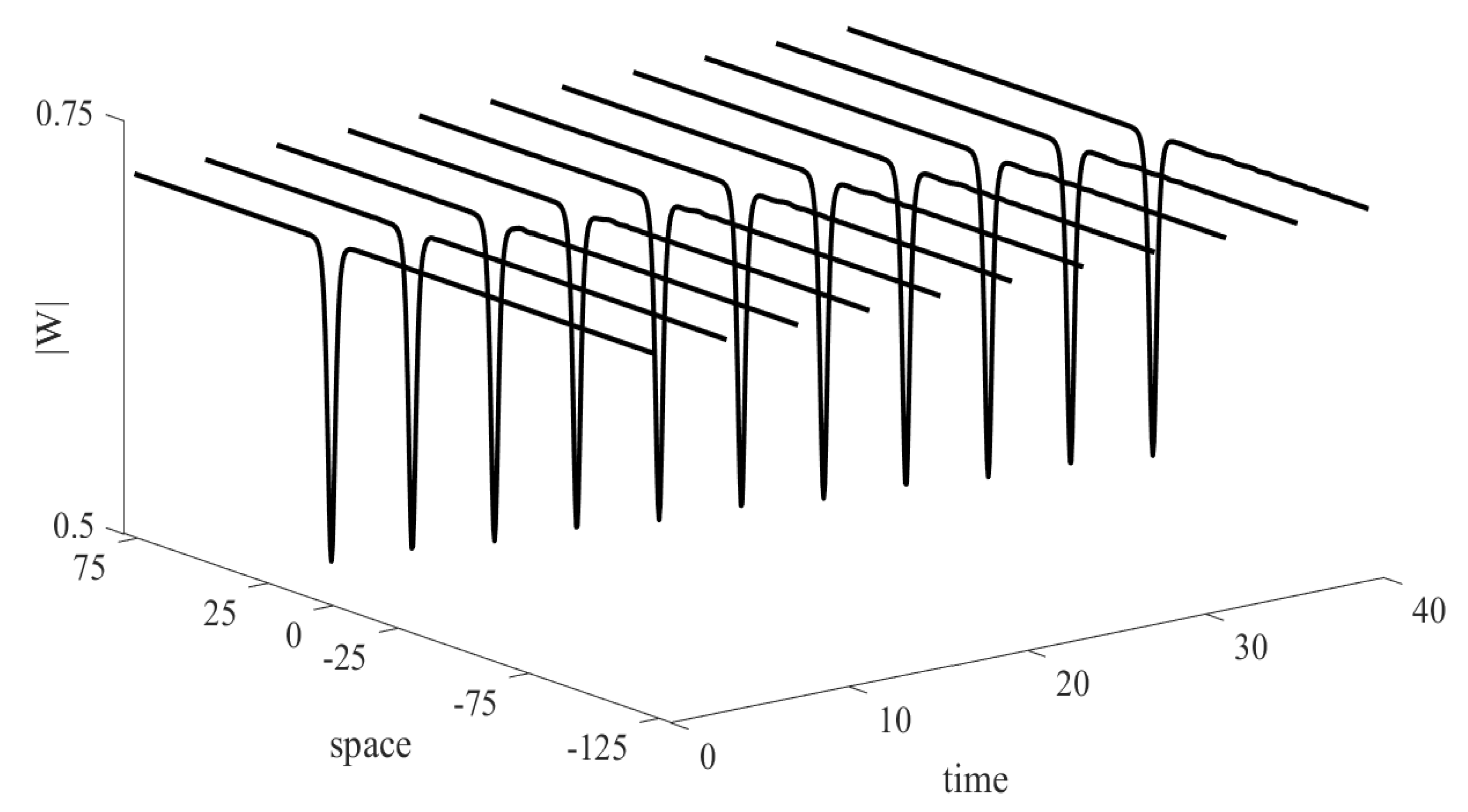
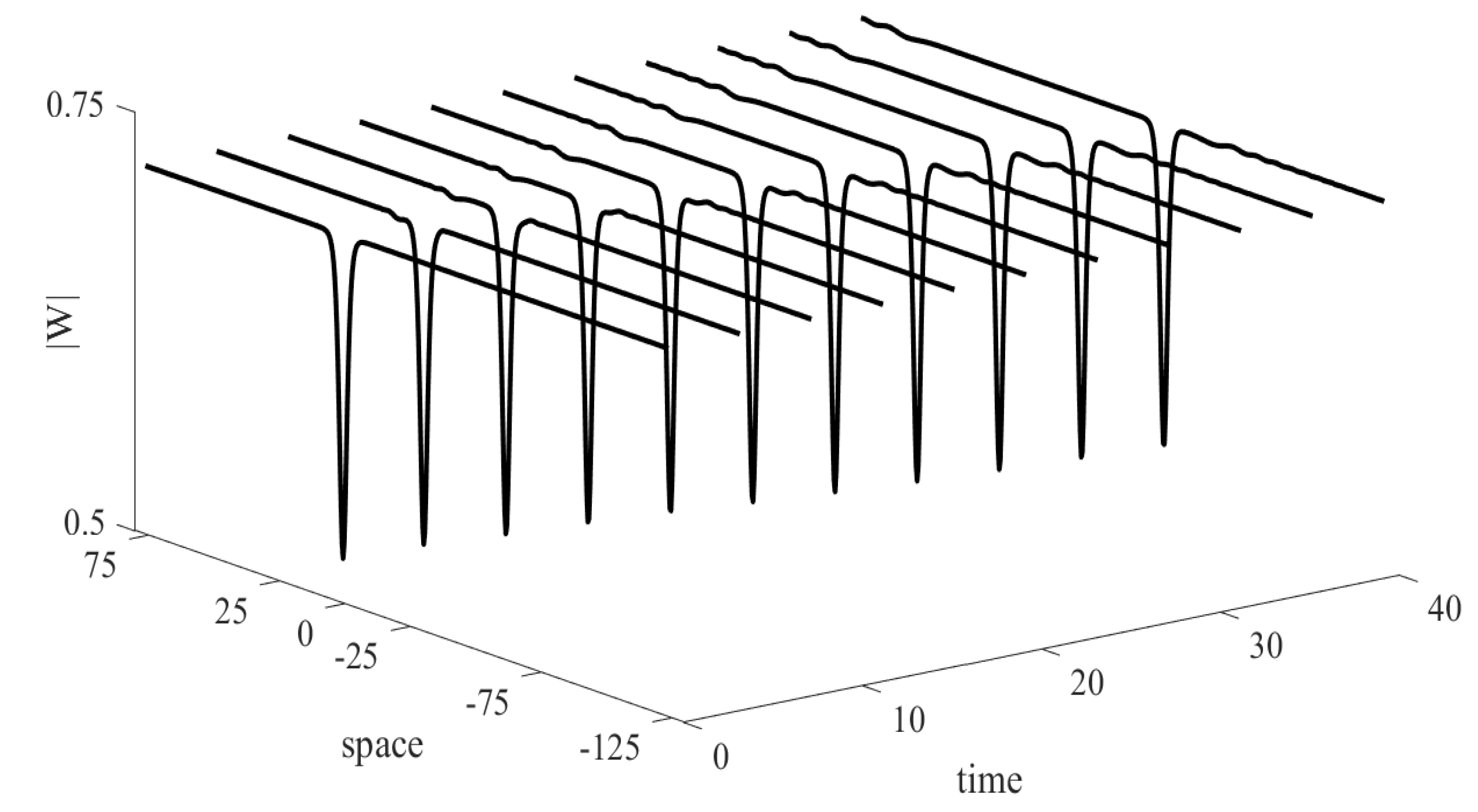
5.2. Numerical Simulation of Dark Solitons’ Motion
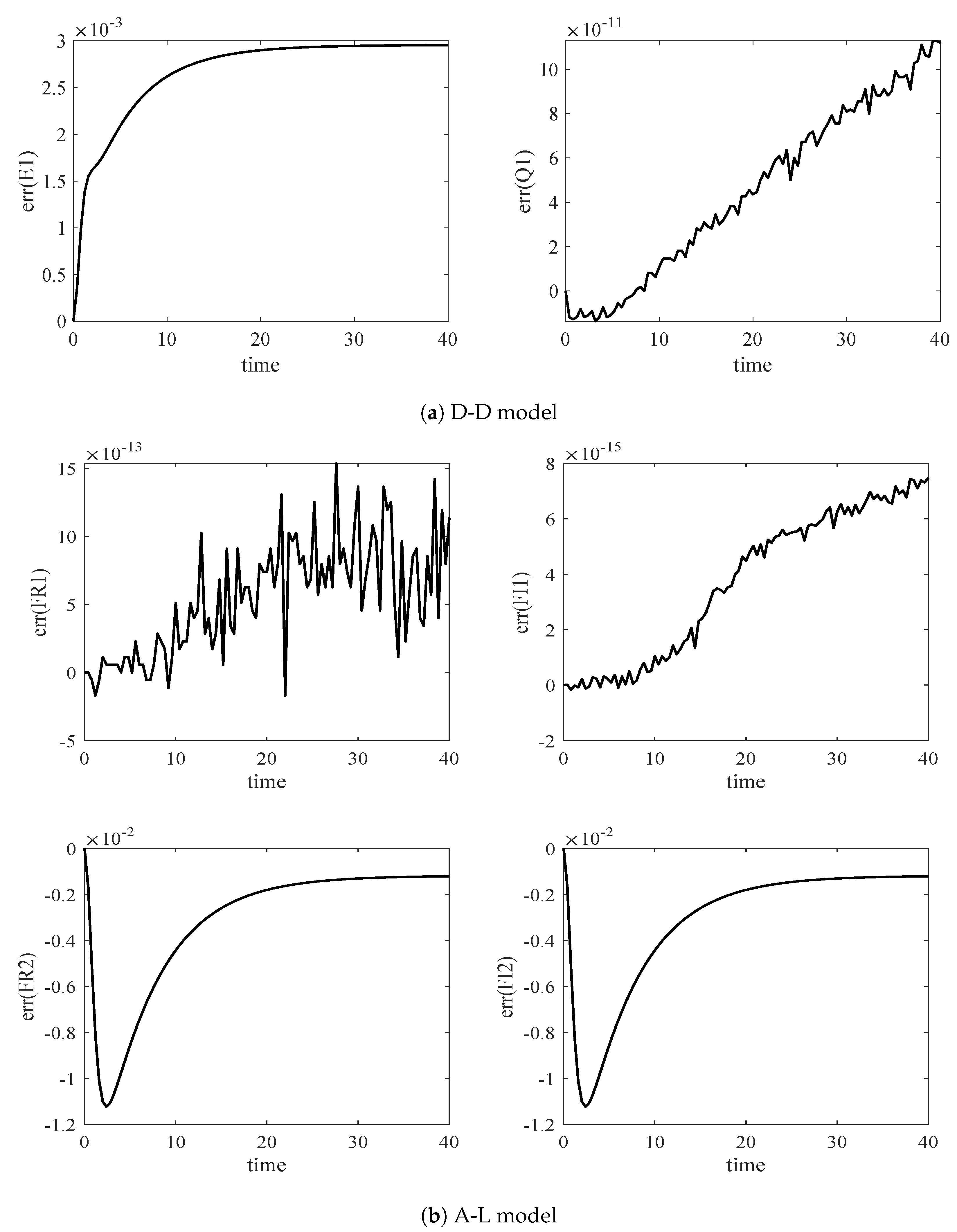
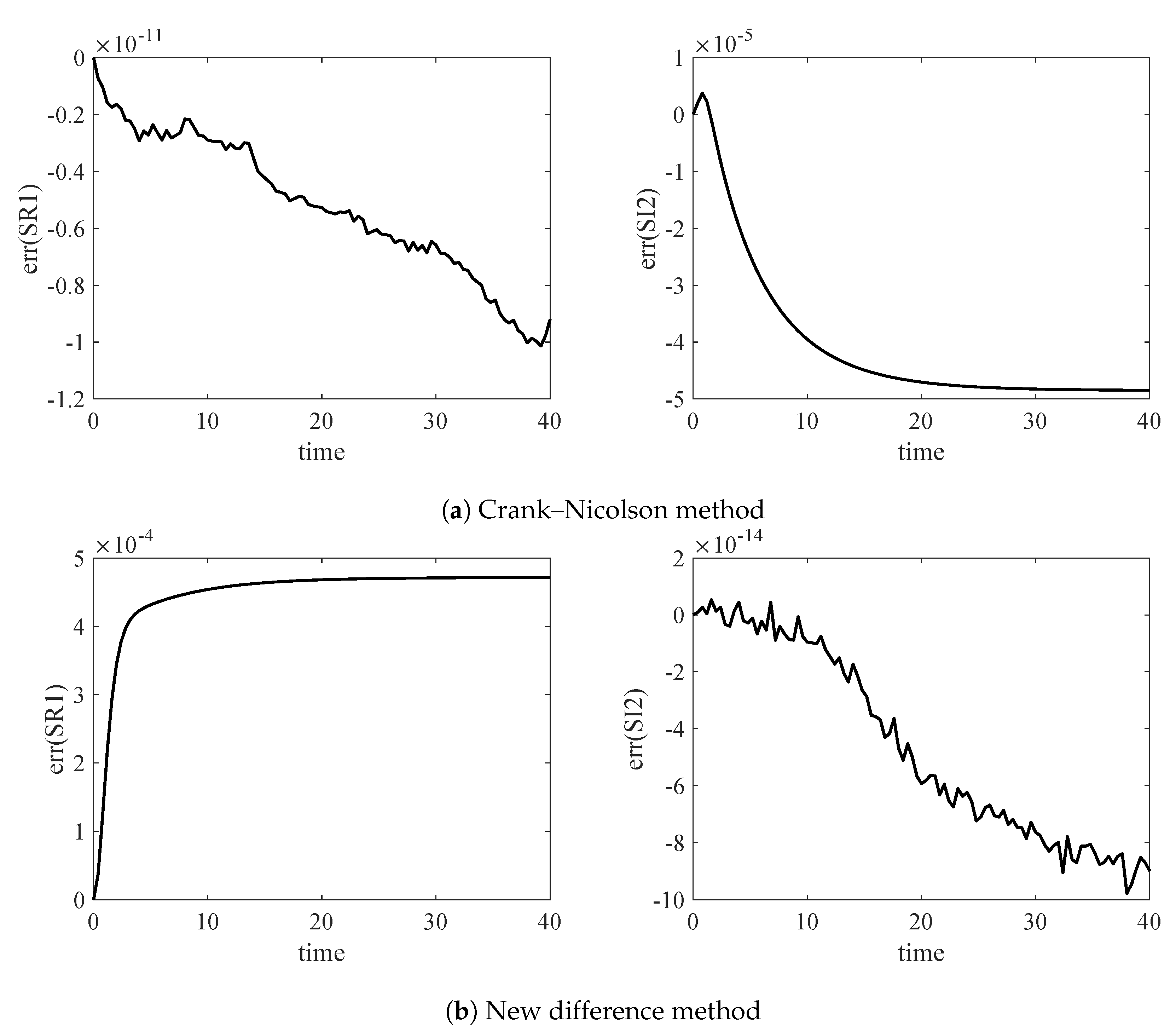
5.3. Preservation of Invariants
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ablowitz, M.J.; Segur, H. Solitons and the Inverse Scattering Transform; SIAM: Philadelphia, PA, USA, 1981. [Google Scholar]
- Dodd, R.K.; Eilbeck, J.C.; Gibbon, J.D.; Morris, H.C. Solitons and Nonlinear Wave Equations; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Hasegawa, A. Optical solitons in fibers. In Optical Solitons in Fibers; Springer: Berlin/Heidelberg, Germany, 1989; pp. 1–74. [Google Scholar]
- Konotop, V.V. Nonlinear Random Waves; World Scientific: Singapore, 1994. [Google Scholar]
- Konotop, V.; Vekslerchik, V. Randomly modulated dark soliton. J. Phys. A Math. Gen. 1991, 24, 767. [Google Scholar] [CrossRef]
- Zakharov, V.E.; Shabat, A.B. Interaction between solitons in a stable medium. Sov. Phys. JETP 1973, 37, 823–828. [Google Scholar]
- Sanz-Serna, J. Methods for the numerical solution of the nonlinear Schrödinger equation. Math. Comput. 1984, 43, 21–27. [Google Scholar] [CrossRef]
- Zhang, L. A high accurate and conservative finite difference scheme for nonlinear Schrödinger equation. Acta Math. Appl. Sin. 2005, 28, 178–186. [Google Scholar]
- Fei, Z.; Pérez-García, V.M.; Vázquez, L. Numerical simulation of nonlinear Schrödinger systems: A new conservative scheme. Appl. Math. Comput. 1995, 71, 165–177. [Google Scholar] [CrossRef]
- Xu, Y.; Shu, C. Local discontinuous Galerkin methods for nonlinear Schrödinger equations. J. Comput. Phys. 2005, 205, 72–97. [Google Scholar] [CrossRef]
- Bratsos, A.; Ehrhardt, M.; Famelis, I.T. A discrete Adomian decomposition method for discrete nonlinear Schrödinger equations. Appl. Math. Comput. 2008, 197, 190–205. [Google Scholar] [CrossRef]
- He, J.H. Homotopy perturbation method: A new nonlinear analytical technique. Appl. Math. Comput. 2003, 135, 73–79. [Google Scholar] [CrossRef]
- Akrivis, G.D. Finite difference discretization of the cubic Schrödinger equation. IMA J. Numer. Anal. 1993, 13, 115–124. [Google Scholar] [CrossRef]
- Borhanifar, A.; Abazari, R. Numerical study of nonlinear Schrödinger and coupled Schrödinger equations by differential transformation method. Opt. Commun. 2010, 283, 2026–2031. [Google Scholar] [CrossRef]
- Zhu, B.; Tang, Y.; Zhang, R.; Zhang, Y. Symplectic simulation of dark solitons motion for nonlinear Schrödinger equation. Numer. Algorithms 2019, 81, 1485–1503. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, M.; Zhu, B.; Feng, Q. Symplectic schemes and symmetric schemes for nonlinear Schrödinger equation in the case of dark solitons motion. Int. J. Model. Simul. Sci. 2021, 12, 2150056. [Google Scholar] [CrossRef]
- Feng, Q.; Huang, J.; Nie, N.; Shang, Z.; Tang, Y. Implementing arbitrarily high-order symplectic methods via Krylov deferred correction technique. Int. J. Model. Simul. Sci. 2010, 1, 277–301. [Google Scholar] [CrossRef]
- Zhu, Y. Implicit difference schemes for the generalized non-linear Schrödinger system. J. Comput. Math. 1983, 1, 116–129. [Google Scholar]
- Guo, B. The convergence of numerical method for nonlinear Schrodinger equation. J. Comput. Math. 1986, 4, 121–130. [Google Scholar]
- Zhang, L.; Chang, Q. A conservative numerical scheme for a class of nonlinear Schrödinger equation with wave operator. Appl. Math. Comput. 2003, 145, 603–612. [Google Scholar] [CrossRef]
- Xie, S.; Li, G.; Yi, S. Compact finite difference schemes with high accuracy for one-dimensional nonlinear Schrödinger equation. Comput. Methods Appl. Mech. Eng. 2009, 198, 1052–1060. [Google Scholar] [CrossRef]
- Wang, T.C.; Guo, B.L. Unconditional convergence of two conservative compact difference schemes for non-linear Schrödinger equation in one dimension. Sci. Sin. Math. 2011, 41, 207–233. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Wang, S. A compact finite difference scheme for the nonlinear Schrödinger equation with wave operator. Appl. Math. Comput. 2012, 219, 3187–3197. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Zhang, T. A new numerical scheme for the nonlinear Schrödinger equation with wave operator. J. Appl. Math. Comput. 2017, 54, 109–125. [Google Scholar] [CrossRef]
- Tang, Y.; Vázquez, L.; Zhang, F.; Pérez-García, V. Symplectic methods for the nonlinear Schrödinger equation. Comput. Math. with Appl. 1996, 32, 73–83. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Pérez-García, V.M.; Vázquez, L. Symplectic methods for the Ablowitz-Ladik model. Appl. Math. Comput. 1997, 82, 17–38. [Google Scholar] [CrossRef]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Tang, Y.; Cao, J.; Liu, X.; Sun, Y. Symplectic methods for the Ablowitz–Ladik discrete nonlinear Schrödinger equation. J. Phys. Math. Theor. 2007, 40, 24–25. [Google Scholar] [CrossRef]
- Guo, B.; Pascual, P.J.; Rodriguez, M.J.; Vázquez, L. Numerical solution of the sine-Gordon equation. Appl. Math. Comput. 1986, 18, 1–14. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h | Order | ||
|---|---|---|---|
| 0.4 | 0.00005 | 8.804684 | |
| 0.2 | 0.00005 | 0.546416 | 4.01416 |
| 0.1 | 0.00005 | 0.034090 | 4.00359 |
| 0.05 | 0.00005 | 0.002130 | 4.00086 |
| h | Order | ||
|---|---|---|---|
| 0.4 | 0.00005 | 5.709740 | |
| 0.2 | 0.00005 | 0.354637 | 4.01251 |
| 0.1 | 0.00005 | 0.022128 | 4.00330 |
| 0.05 | 0.00005 | 0.001382 | 4.00083 |
| h | Order | ||
|---|---|---|---|
| 0.4 | 0.008 | 9.490216 | |
| 0.2 | 0.004 | 0.589315 | 4.01295 |
| 0.1 | 0.002 | 0.036771 | 4.00331 |
| 0.05 | 0.001 | 0.002297 | 4.00083 |
| h | Order | ||
|---|---|---|---|
| 0.4 | 0.008 | 5.730127 | |
| 0.2 | 0.004 | 0.355952 | 4.01223 |
| 0.1 | 0.002 | 0.022211 | 4.00323 |
| 0.05 | 0.001 | 0.001388 | 4.00082 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Luo, Q.; Feng, Q. The Convergence of Symmetric Discretization Models for Nonlinear Schrödinger Equation in Dark Solitons’ Motion. Symmetry 2023, 15, 1229. https://doi.org/10.3390/sym15061229
Li Y, Luo Q, Feng Q. The Convergence of Symmetric Discretization Models for Nonlinear Schrödinger Equation in Dark Solitons’ Motion. Symmetry. 2023; 15(6):1229. https://doi.org/10.3390/sym15061229
Chicago/Turabian StyleLi, Yazhuo, Qian Luo, and Quandong Feng. 2023. "The Convergence of Symmetric Discretization Models for Nonlinear Schrödinger Equation in Dark Solitons’ Motion" Symmetry 15, no. 6: 1229. https://doi.org/10.3390/sym15061229
APA StyleLi, Y., Luo, Q., & Feng, Q. (2023). The Convergence of Symmetric Discretization Models for Nonlinear Schrödinger Equation in Dark Solitons’ Motion. Symmetry, 15(6), 1229. https://doi.org/10.3390/sym15061229