
Vieta–Lucas Polynomials for the Brusselator System with the Rabotnov Fractional-Exponential Kernel Fractional Derivative





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Notations
2.1. Definitions of Fractional Derivatives
2.2. Shifting Vieta–Lucas Polynomials
- In Equation (4), the coefficients’ series are bounded, that is,
- The following inequality applies to the error estimate norm -norm):
- The following absolute error bound applies if :Here, and .
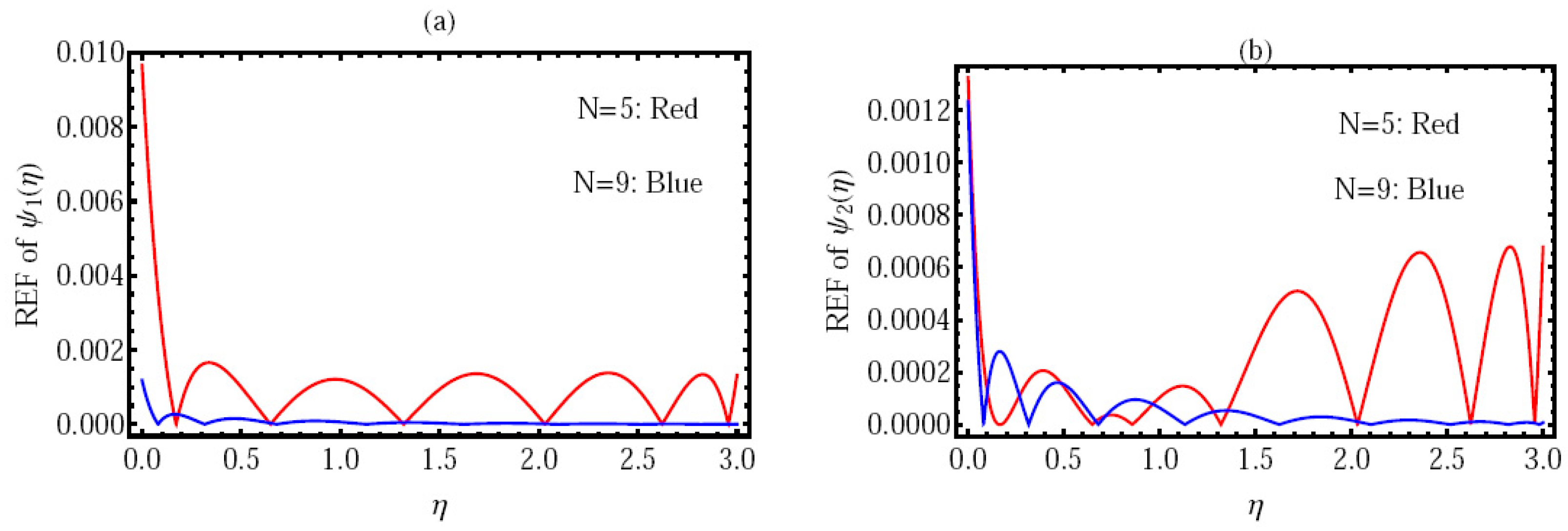
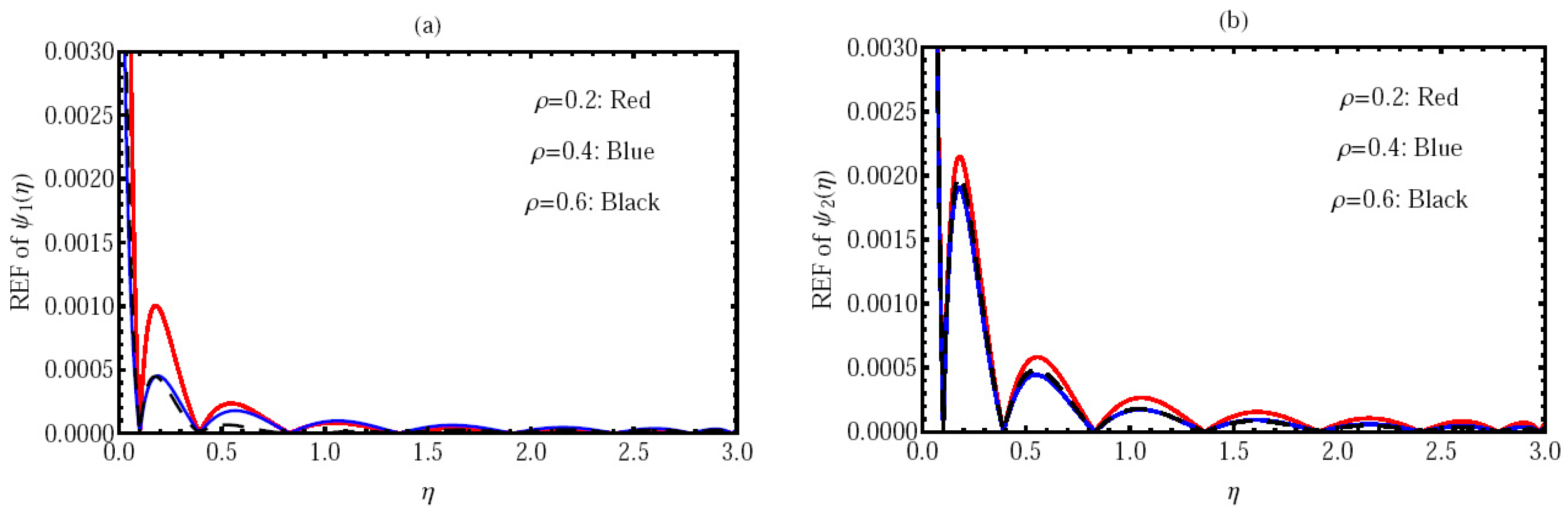
3. Numerical Implementation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kilbas, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon & Breach: New York, NY, USA, 1993. [Google Scholar]
- Diethelm, K. An algorithm for the numerical solution of differential equations of fractional order. Electron. Trans. Numer. Anal. 1997, 5, 1–6. [Google Scholar]
- Khader, M.M.; Adel, M. Numerical study of the fractional modeling on SIR equations with constant vaccination rate using GEM. Int. J. Nonlinear Sci. Numer. Simul. 2019, 20, 69–76. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Gao, W.; Ghanbari, B.; Baskonus, H.M. New numerical simulations for some real-world problems with Atangana-Baleanu fractional derivative. Chaos Solitons Fractals 2019, 128, 34–43. [Google Scholar] [CrossRef]
- Morales-Delgado, V.F.; Gomez-Aguilar, J.F.; Saad, K.M.; Escobar-Jimenez, R.F. Application of the Caputo-Fabrizio and Atangana-Baleanu fractional derivatives to the mathematical model of cancer chemotherapy effect. Math. Methods Appl. Sci. 2019, 42, 1167–1193. [Google Scholar] [CrossRef]
- Toufik, M.; Atangana, A. New numerical approximation of fractional derivative with the non-local and non-singular kernel: Application to chaotic models. Eur. Phys. J. Plus 2017, 132, 1–14. [Google Scholar] [CrossRef]
- Kumar, D.; Singh, J.; Baleanu, D. On the analysis of vibration equation involving a fractional derivative with Mittag-Leffler law. Math. Methods Appl. Sci. 2020, 43, 443–457. [Google Scholar] [CrossRef]
- Saad, K.M.; Khader, M.M.; Gomez-Aguilar, J.F.; Baleanu, D. Numerical solutions of the fractional Fisher’s type equations with Atangana-Baleanu fractional derivative by using spectral collocation methods. Chaos 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Gusu, D.M.; Mohammed, P.O.; Wedajo, G.; Nonlaopon, K.; Hamed, Y.S. Solution of general fractional-order differential equations by using the spectral Tau method. Fractal Fract. 2022, 6, 7. [Google Scholar] [CrossRef]
- Youssri, Y.H.; Abd-Elhameed, W.M.; Ahmed, H.M. New fractional derivative expression of the shifted third-kind Chebyshev polynomials: Application to a type of nonlinear fractional pantograph differential equations. J. Funct. Spaces 2022, 2022, 3966135. [Google Scholar] [CrossRef]
- Doha, E.H.; Abd-Elhameed, W.M.; Ahmed, H.M. The coefficients of differentiated expansions of double and triple Jacobi polynomials. Bull. Iran. Math. Soc. 2012, 38, 739–766. [Google Scholar]
- Abd-Elhameed, W.M.; Youssri, Y.H. Connection formulae between generalized Lucas polynomials and some Jacobi polynomials: Application to certain types of fourth-order BVPs. Int. J. Appl. Comput. Math. 2020, 6, 1–19. [Google Scholar] [CrossRef]
- Agarwal, F.; El-Sayed, A.A. Vieta-Lucas polynomials for solving a fractional-order mathematical physics model. Adv. Differ. Equ. 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Adel, M.; Khader, M.M.; Assiri, T.A.; Kallel, W. Numerical simulation for COVID-19 model using a multidomain spectral relaxation technique. Symmetry 2023, 15, 931. [Google Scholar] [CrossRef]
- Alesemi, M. Numerical analysis of fractional-order parabolic equation involving Atangana-Baleanu derivative. Symmetry 2023, 15, 237. [Google Scholar] [CrossRef]
- Gafiychuk, V.; Datsko, B. Stability analysis and limit cycle in the fractional system with Brusselator nonlinearities. Phys. Lett. A 2008, 372, 4902–4904. [Google Scholar] [CrossRef]
- Wang, Y.; Li, C. Does the fractional Brusselator with efficient dimension less than 1 have a limit cycle? Phys. Lett. A 2007, 363, 414–419. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D. New fractional derivative with non-local and non-singular kernel. Therm. Sci. 2016, 20, 736–769. [Google Scholar] [CrossRef]
- Kumar, S.; Gomez-Aguilar, J.F.; Lavin-Delgado, J.E.; Baleanu, D. Derivation of operational matrix of Rabotnov fractional-exponential kernel and its application to fractional Lienard equation. Alex. Eng. J. 2020, 56, 991–2997. [Google Scholar] [CrossRef]
- Horadam, A.F. Vieta Polynomials; The University of New England: Armidaie, VC, Australia, 2000. [Google Scholar]
- Zakaria, M.; Khader, M.M.; Al-Dayel, I.; Al-Tayeb, W. Solving fractional generalized Fisher-Kolmogorov-Petrovsky-Piskunov’s equation using compact finite different method together with spectral collocation algorithms. J. Math. 2022, 2022, 1901131. [Google Scholar]
- Jafari, H.; Abdelouahab, K.; Baleanu, D. Variational iteration method for a fractional-order Brusselator system. Abstr. Appl. Anal. 2014, 2014, 496323. [Google Scholar] [CrossRef]
- El-Hawary, H.M.; Salim, M.S.; Hussien, H.S. Ultraspherical integral method for optimal control problems governed by ordinary differential equations. J. Glob. Optim. 2003, 25, 283–303. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khader, M.M.; Macías-Díaz, J.E.; Saad, K.M.; Hamanah, W.M. Vieta–Lucas Polynomials for the Brusselator System with the Rabotnov Fractional-Exponential Kernel Fractional Derivative. Symmetry 2023, 15, 1619. https://doi.org/10.3390/sym15091619
Khader MM, Macías-Díaz JE, Saad KM, Hamanah WM. Vieta–Lucas Polynomials for the Brusselator System with the Rabotnov Fractional-Exponential Kernel Fractional Derivative. Symmetry. 2023; 15(9):1619. https://doi.org/10.3390/sym15091619
Chicago/Turabian StyleKhader, Mohamed M., Jorge E. Macías-Díaz, Khaled M. Saad, and Waleed M. Hamanah. 2023. "Vieta–Lucas Polynomials for the Brusselator System with the Rabotnov Fractional-Exponential Kernel Fractional Derivative" Symmetry 15, no. 9: 1619. https://doi.org/10.3390/sym15091619
APA StyleKhader, M. M., Macías-Díaz, J. E., Saad, K. M., & Hamanah, W. M. (2023). Vieta–Lucas Polynomials for the Brusselator System with the Rabotnov Fractional-Exponential Kernel Fractional Derivative. Symmetry, 15(9), 1619. https://doi.org/10.3390/sym15091619