
A Human-like Inverse Kinematics Algorithm of an Upper Limb Rehabilitation Exoskeleton


Abstract
:1. Introduction
- A multiple-input multiple-output (MIMO) shoulder girdle motion prediction model is proposed. It can be used to estimate elevation/depression and protraction/retraction angles of the shoulder girdle based on the humerus orientation.
- An IK algorithm that integrates the gradient projection method and task priority is proposed and validated. It enables FREE to achieve human-like shoulder movement.
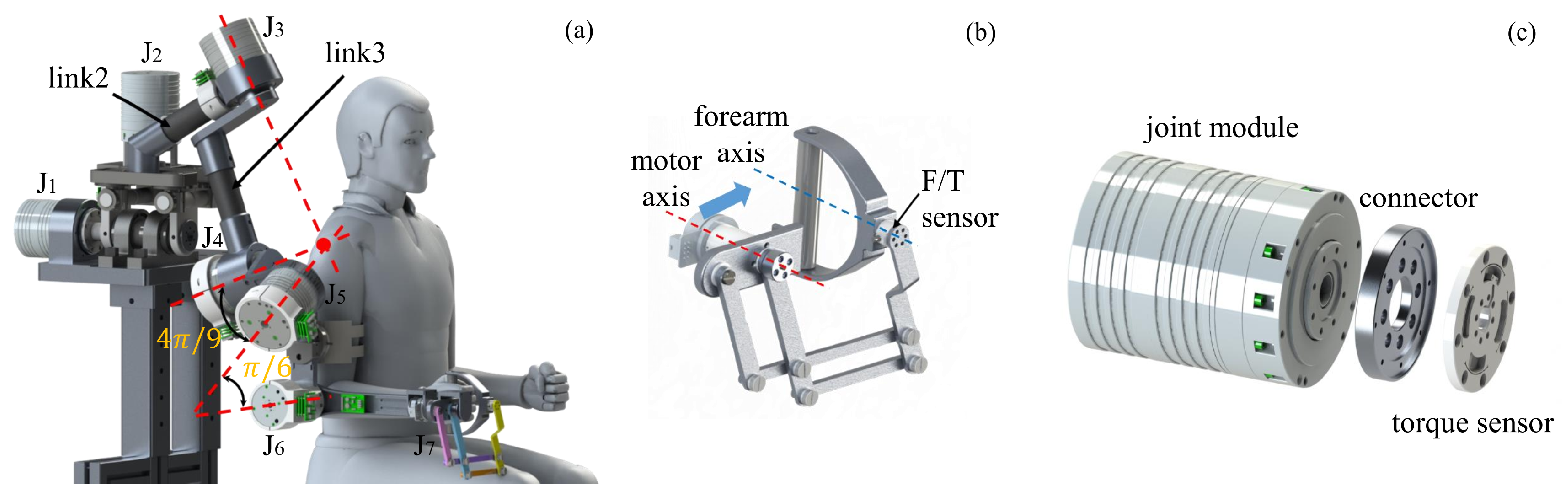
2. System Design
3. Kinematics Algorithm
3.1. Human Shoulder Kinematics
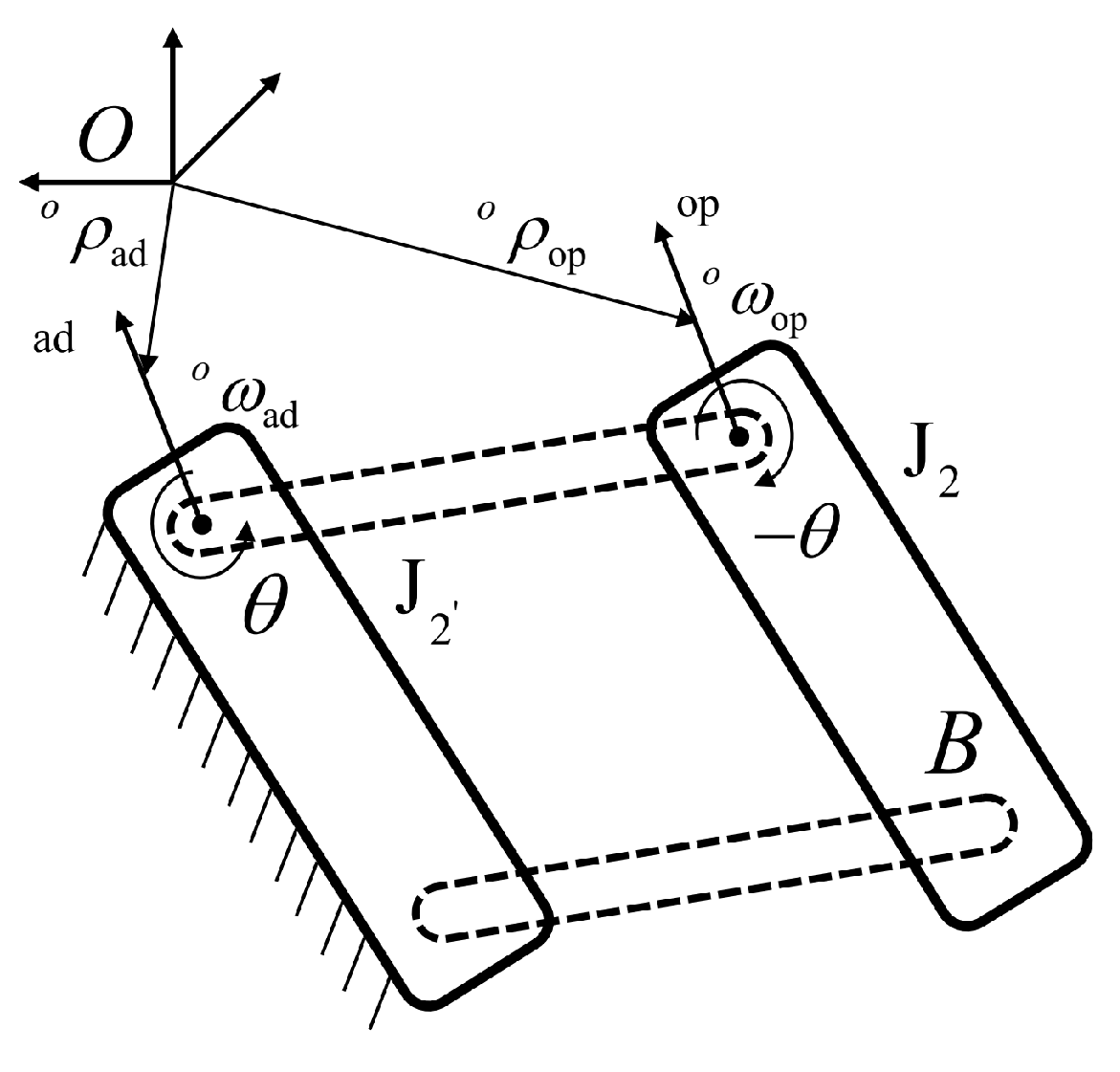
3.2. Robot Kinematics
| Algorithm 1 Constrained task-priority and projected-gradient IK algorithm (CTPPG-IK). |
|
3.3. Convert Generated Motion to Exoskeleton Motion
4. Experiments and Results
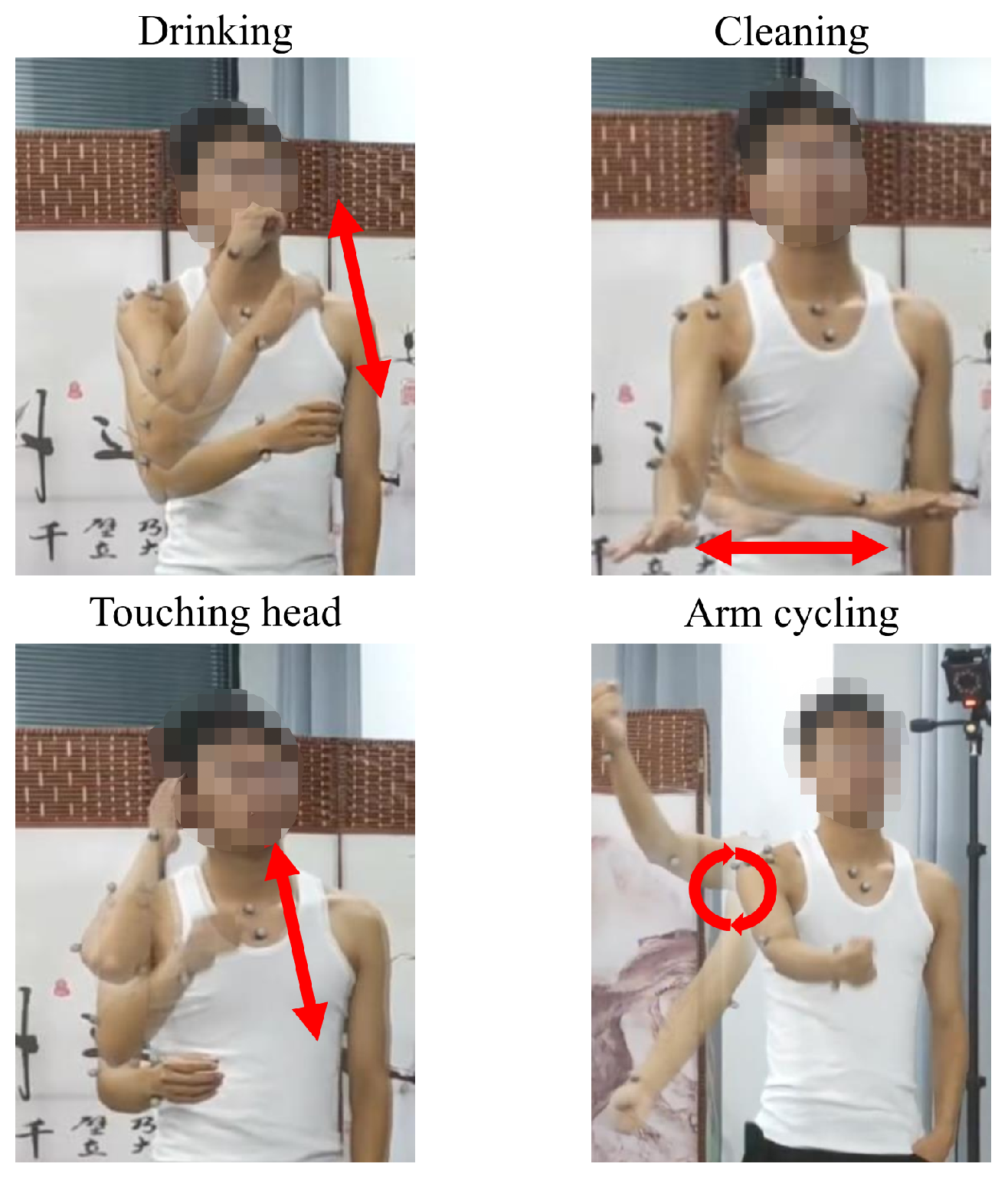
4.1. Experimental Protocol
4.2. Data Processing and Analysis Criteria
4.3. Results and Discussion
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Adamson, J.; Beswick, A.; Ebrahim, S. Is stroke the most common cause of disability? J. Stroke Cerebrovasc. Dis. 2004, 13, 171–177. [Google Scholar] [CrossRef]
- Kwakkel, G.; Veerbeek, J.M.; van Wegen, E.E.; Wolf, S.L. Constraint-induced movement therapy after stroke. Lancet Neurol. 2015, 14, 224–234. [Google Scholar] [CrossRef] [PubMed]
- Duret, C.; Grosmaire, A.G.; Krebs, H.I. Robot-assisted therapy in upper extremity hemiparesis: Overview of an evidence-based approach. Front. Neurol. 2019, 10, 412. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Shen, Y.; Rosen, J. Sensor reduction, estimation, and control of an upper-limb exoskeleton. IEEE Robot. Autom. Lett. 2021, 6, 1012–1019. [Google Scholar] [CrossRef]
- Wang, J.; Barry, O.R. Inverse optimal robust adaptive controller for upper limb rehabilitation exoskeletons with inertia and load uncertainties. IEEE Robot. Autom. Lett. 2021, 6, 2171–2178. [Google Scholar] [CrossRef]
- Xu, K.; Li, W.; Ji, C.; Liu, B. Study on Control Technology of Tendon Bionic Driving Robot System. J. Bionic Eng. 2023, 20, 584–597. [Google Scholar] [CrossRef]
- Perry, J.C.; Powell, J.M.; Rosen, J. Isotropy of an Upper Limb Exoskeleton and the Kinematics and Dynamics of the Human Arm. Appl. Bionics Biomech. 2009, 6, 175–191. [Google Scholar] [CrossRef]
- Ergin, M.A.; Patoglu, V. ASSISTON-SE: A self-aligning shoulder-elbow exoskeleton. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012; pp. 2479–2485. [Google Scholar]
- Pan, J.; Astarita, D.; Baldoni, A.; Dell’Agnello, F.; Crea, S.; Vitiello, N.; Trigili, E. NESM-γ: An upper-limb exoskeleton with compliant actuators for clinical deployment. IEEE Robot. Autom. Lett. 2022, 7, 7708–7715. [Google Scholar] [CrossRef]
- He, L.; Xiong, C.; Liu, K.; Huang, J.; He, C.; Chen, W. Mechatronic design of a synergetic upper limb exoskeletal robot and wrench-based assistive control. J. Bionic Eng. 2018, 15, 247–259. [Google Scholar] [CrossRef]
- He, C.; Xiong, C.H.; Chen, Z.J.; Fan, W.; Huang, X.L.; Fu, C. Preliminary assessment of a postural synergy-based exoskeleton for post-stroke upper limb rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 1795–1805. [Google Scholar] [CrossRef]
- Xu, P.; Xia, D.; Li, J.; Zhou, J.; Xie, L. Execution and perception of upper limb exoskeleton for stroke patients: A systematic review. Intell. Serv. Robot. 2022, 15, 557–578. [Google Scholar] [CrossRef]
- Narayan, J.; Kalita, B.; Dwivedy, S.K. Development of robot-based upper limb devices for rehabilitation purposes: A systematic review. Augment. Hum. Res. 2021, 6, 1–33. [Google Scholar] [CrossRef]
- Zeiaee, A.; Zarrin, R.S.; Eib, A.; Langari, R.; Tafreshi, R. CLEVERarm: A Lightweight and Compact Exoskeleton for Upper-Limb Rehabilitation. IEEE Robot. Autom. Lett. 2021, 7, 1880–1887. [Google Scholar] [CrossRef]
- Kim, B.; Deshpande, A.D. An upper-body rehabilitation exoskeleton Harmony with an anatomical shoulder mechanism: Design, modeling, control, and performance evaluation. Int. J. Robot. Res. 2017, 36, 414–435. [Google Scholar] [CrossRef]
- Yang, X.; Huang, T.H.; Hu, H.; Yu, S.; Zhang, S.; Zhou, X.; Carriero, A.; Yue, G.; Su, H. Spine-inspired continuum soft exoskeleton for stoop lifting assistance. IEEE Robot. Autom. Lett. 2019, 4, 4547–4554. [Google Scholar] [CrossRef]
- Burdet, E.; Franklin, D.W.; Milner, T.E. Human Robotics: Neuromechanics and Motor Control; MIT Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Brahmi, B.; Saad, M.; Rahman, M.H.; Ochoa-Luna, C. Cartesian trajectory tracking of a 7-DOF exoskeleton robot based on human inverse kinematics. IEEE Trans. Syst. Man. Cybern. Syst. 2017, 49, 600–611. [Google Scholar] [CrossRef]
- Kim, H.; Miller, L.M.; Byl, N.; Abrams, G.M.; Rosen, J. Redundancy resolution of the human arm and an upper limb exoskeleton. IEEE Trans. Biomed. Eng. 2012, 59, 1770–1779. [Google Scholar]
- Jung, Y.; Bae, J. Kinematic analysis of a 5-dof upper-limb exoskeleton with a tilted and vertically translating shoulder joint. IEEE/ASME Trans. Mechatronics 2014, 20, 1428–1439. [Google Scholar] [CrossRef]
- Wu, K.Y.; Su, Y.Y.; Yu, Y.L.; Lin, C.H.; Lan, C.C. A 5-degrees-of-freedom lightweight elbow-wrist exoskeleton for forearm fine-motion rehabilitation. IEEE/ASME Trans. Mechatronics 2019, 24, 2684–2695. [Google Scholar] [CrossRef]
- Lauretti, C.; Cordella, F.; Ciancio, A.; Trigili, E.; Catalan, J.; Badesa, F.; Crea, S.; Pagliara, S.; Sterzi, S.; Vitiello, N.; et al. Learning by demonstration for motion planning of upper-limb exoskeletons. Front. Neurorobot. 2018, 12, 5. [Google Scholar] [CrossRef]
- Deng, M.; Li, Z.; Kang, Y.; Chen, C.P.; Chu, X. A learning-based hierarchical control scheme for an exoskeleton robot in human–robot cooperative manipulation. IEEE Trans. Cybern. 2018, 50, 112–125. [Google Scholar] [CrossRef]
- Averta, G.; Della Santina, C.; Valenza, G.; Bicchi, A.; Bianchi, M. Exploiting upper-limb functional principal components for human-like motion generation of anthropomorphic robots. J. Neuroeng. Rehabil. 2020, 17, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Keemink, A.; van Oort, G.; Wessels, M.; Stienen, A. Differential inverse kinematics of a redundant 4R exoskeleton shoulder joint. IEEE Trans. Neural Syst. Rehabil. Eng. A Publ. IEEE Eng. Med. Biol. Soc. 2018, 26, 817–829. [Google Scholar] [CrossRef]
- Dalla Gasperina, S.; Ghonasgi, K.; de Oliveira, A.C.; Gandolla, M.; Pedrocchi, A.; Deshpande, A. A novel inverse kinematics method for upper-limb exoskeleton under joint coordination constraints. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 3404–3409. [Google Scholar]
- Sadeghian, H.; Villani, L.; Keshmiri, M.; Siciliano, B. Task-space control of robot manipulators with null-space compliance. IEEE Trans. Robot. 2013, 30, 493–506. [Google Scholar] [CrossRef]
- Zaplana, I.; Basanez, L. A novel closed-form solution for the inverse kinematics of redundant manipulators through workspace analysis. Mech. Mach. Theory 2018, 121, 829–843. [Google Scholar] [CrossRef]
- Marić, F.; Giamou, M.; Hall, A.W.; Khoubyarian, S.; Petrović, I.; Kelly, J. Riemannian optimization for distance-geometric inverse kinematics. IEEE Trans. Robot. 2021, 38, 1703–1722. [Google Scholar] [CrossRef]
- Zarrin, R.S.; Zeiaee, A.; Langari, R.; Buchanan, J.J.; Robson, N. Towards autonomous ergonomic upper-limb exoskeletons: A computational approach for planning a human-like path. Robot. Auton. Syst. 2021, 145, 103843. [Google Scholar] [CrossRef]
- Jackson, P.; Newmann, D. Essentials of Kinesiology for the Physical Therapist Assistant; Elsevier Health Sciences: Amsterdam, The Netherlands, 2009; pp. 227–271. [Google Scholar]
- Nef, T.; Mihelj, M.; Riener, R. ARMin: A robot for patient-cooperative arm therapy. Med Biol. Eng. Comput. 2007, 45, 887–900. [Google Scholar] [CrossRef]
- Klopčar, N.; Lenarčič, J. Bilateral and unilateral shoulder girdle kinematics during humeral elevation. Clin. Biomech. 2006, 21, S20–S26. [Google Scholar] [CrossRef]
- Xu, S.; An, X.; Qiao, X.; Zhu, L.; Li, L. Multi-output least-squares support vector regression machines. Pattern Recognit. Lett. 2013, 34, 1078–1084. [Google Scholar] [CrossRef]
- Nakamura, Y.; Hanafusa, H. Inverse kinematic solutions with singularity robustness for robot manipulator control. J. Dyn. Syst. Meas. Control 1986, 108, 163–171. [Google Scholar] [CrossRef]
- Liegeois, A. Automatic supervisory control of the configuration and behavior of multibody mechanisms. IEEE Trans. Syst. Man. Cybern. 1977, 7, 868–871. [Google Scholar]
- Nakamura, Y.; Hanafusa, H.; Yoshikawa, T. Task-priority based redundancy control of robot manipulators. Int. J. Robot. Res. 1987, 6, 3–15. [Google Scholar] [CrossRef]
- Wu, G.; Van der Helm, F.C.; Veeger, H.D.; Makhsous, M.; Van Roy, P.; Anglin, C.; Nagels, J.; Karduna, A.R.; McQuade, K.; Wang, X.; et al. ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion Part II: Shoulder, elbow, wrist and hand. J. Biomech. 2005, 38, 981–992. [Google Scholar] [CrossRef] [PubMed]
- Phuoc, L.M.; Martinet, P.; Lee, S.; Kim, H. Damped least square based genetic algorithm with Ggaussian distribution of damping factor for singularity-robust inverse kinematics. J. Mech. Sci. Technol. 2008, 22, 1330–1338. [Google Scholar] [CrossRef]
- Zhou, Y.; Tang, W.; Zhang, J. Algorithm for multi-joint redundant robot inverse kinematics based on the bayesian-BP neural network. In Proceedings of the 2008 International Conference on Intelligent Computation Technology and Automation (ICICTA), Changsha, China, 20–22 October 2008; Volume 1, pp. 173–178. [Google Scholar]
- Luo, S.; Chu, D.; Li, Q.; He, Y. Inverse kinematics solution of 6-DOF manipulator based on multi-objective full-parameter optimization PSO algorithm. Front. Neurorobot. 2022, 16, 791796. [Google Scholar] [CrossRef]
- Mayorga, R.V.; Sanongboon, P. Inverse kinematics and geometrically bounded singularities prevention of redundant manipulators: An Artificial Neural Network approach. Robot. Auton. Syst. 2005, 53, 164–176. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | ||
| 0 | 0 | |||
| 2 | rotates with | |||
| 3 | 0 | 0 | ||
| 4 | 0 | 0 | ||
| 5 | 0 | −0.563 | ||
| 6 | 0 | 0.508 | ||
| 7 | 0 | 0.333 | ||
| Motion | Algorithm | |||
|---|---|---|---|---|
| Cleaning | J-IK | 1.52 × | 1.47 × | 2.77 × |
| CTPPG-IK | 2.84 × | 6.65 × | 7.58 × | |
| Drinking | J-IK | 2.47 × | 1.27 × | 3.19 × |
| CTPPG-IK | 1.61 × | 4.15 × | 1.46 × | |
| Arm | J-IK | 2.98 × | 1.79 × | 3.66 × |
| Cycling | CTPPG-IK | 2.07 × | 3.04 × | 1.89 × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pei, S.; Wang, J.; Guo, J.; Yin, H.; Yao, Y. A Human-like Inverse Kinematics Algorithm of an Upper Limb Rehabilitation Exoskeleton. Symmetry 2023, 15, 1657. https://doi.org/10.3390/sym15091657
Pei S, Wang J, Guo J, Yin H, Yao Y. A Human-like Inverse Kinematics Algorithm of an Upper Limb Rehabilitation Exoskeleton. Symmetry. 2023; 15(9):1657. https://doi.org/10.3390/sym15091657
Chicago/Turabian StylePei, Shuo, Jiajia Wang, Junlong Guo, Hesheng Yin, and Yufeng Yao. 2023. "A Human-like Inverse Kinematics Algorithm of an Upper Limb Rehabilitation Exoskeleton" Symmetry 15, no. 9: 1657. https://doi.org/10.3390/sym15091657
APA StylePei, S., Wang, J., Guo, J., Yin, H., & Yao, Y. (2023). A Human-like Inverse Kinematics Algorithm of an Upper Limb Rehabilitation Exoskeleton. Symmetry, 15(9), 1657. https://doi.org/10.3390/sym15091657