
Control and Analysis of a Hybrid-Rotor Bearingless Switched Reluctance Motor with One-Phase Full-Period Suspension


Abstract
:1. Introduction
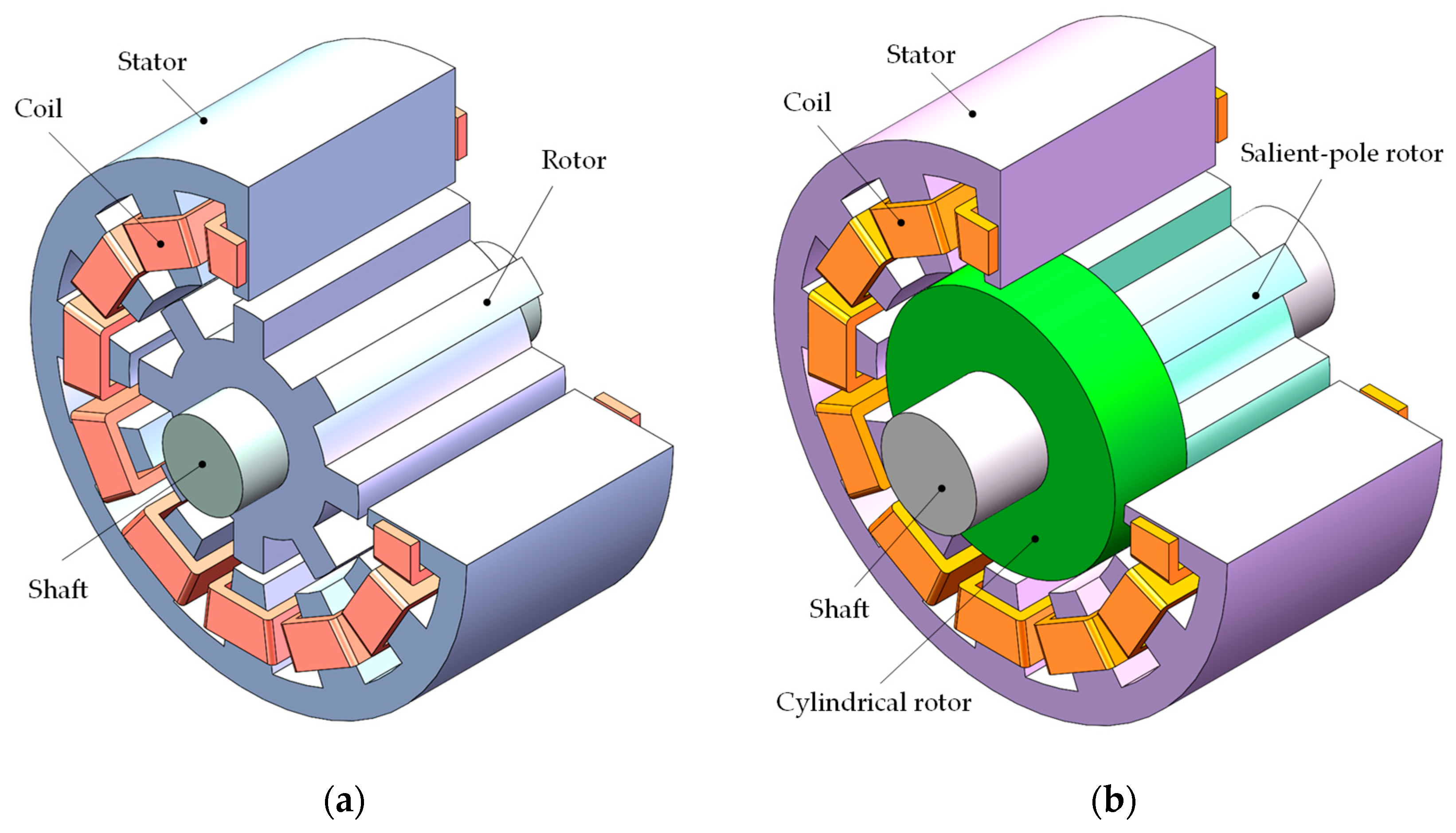
2. Structure and Operating Principle of the 12/8-Pole HBSRM
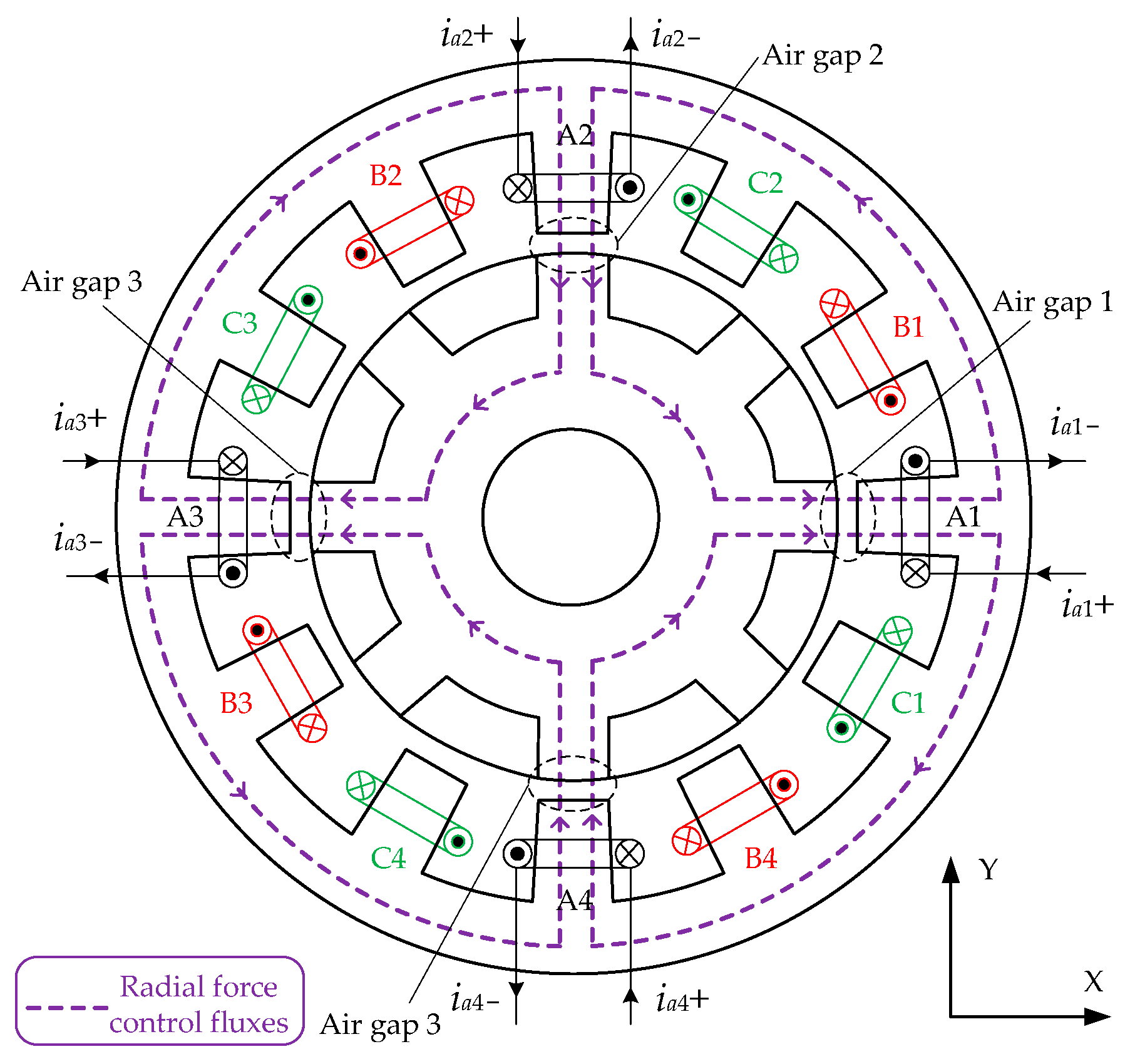
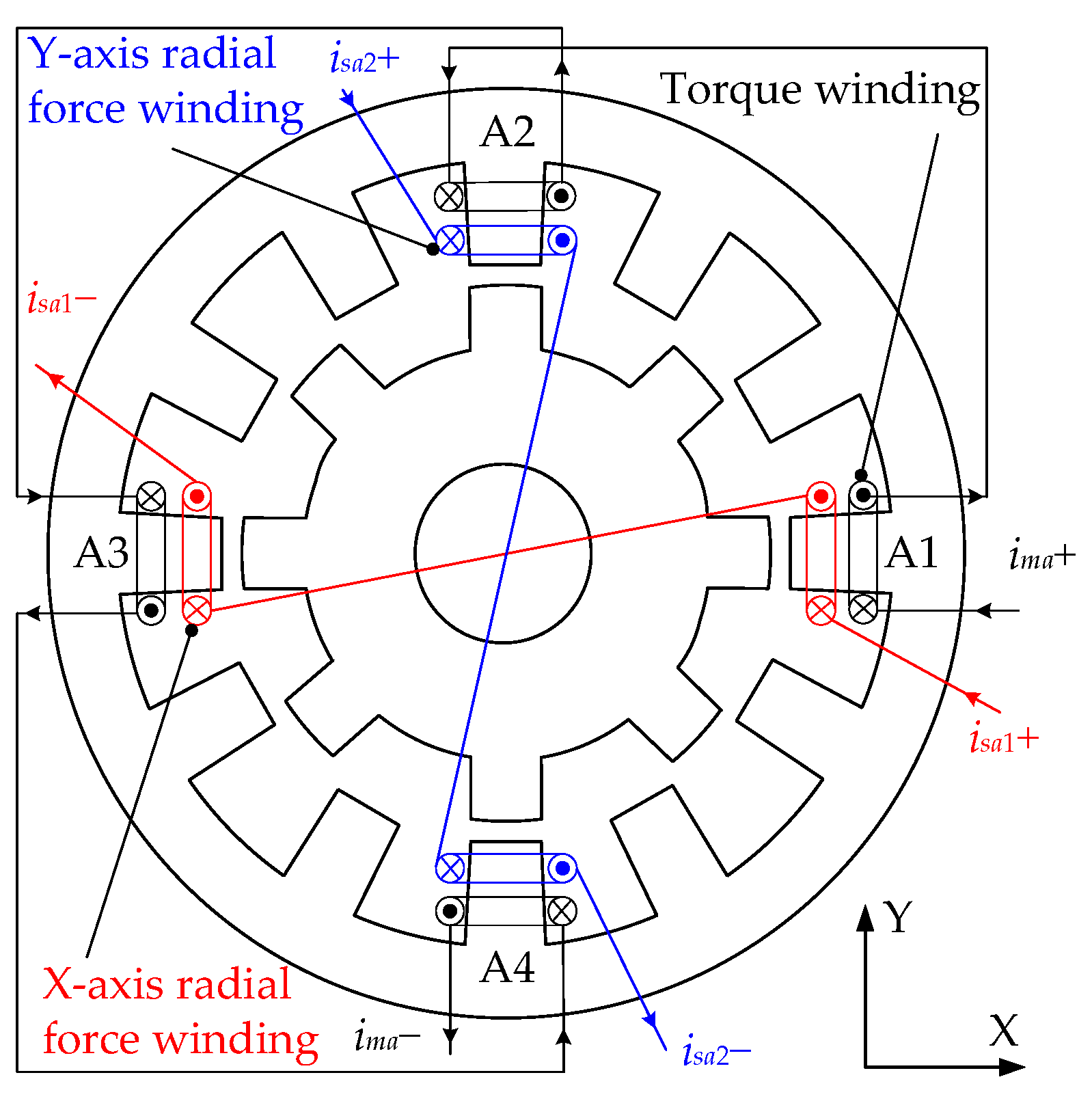
2.1. Structure and Radial Force Production
2.2. Analysis of A-Phase Full-Period Levitation Operations
3. Mathematical Models of the Radial Force and Torque
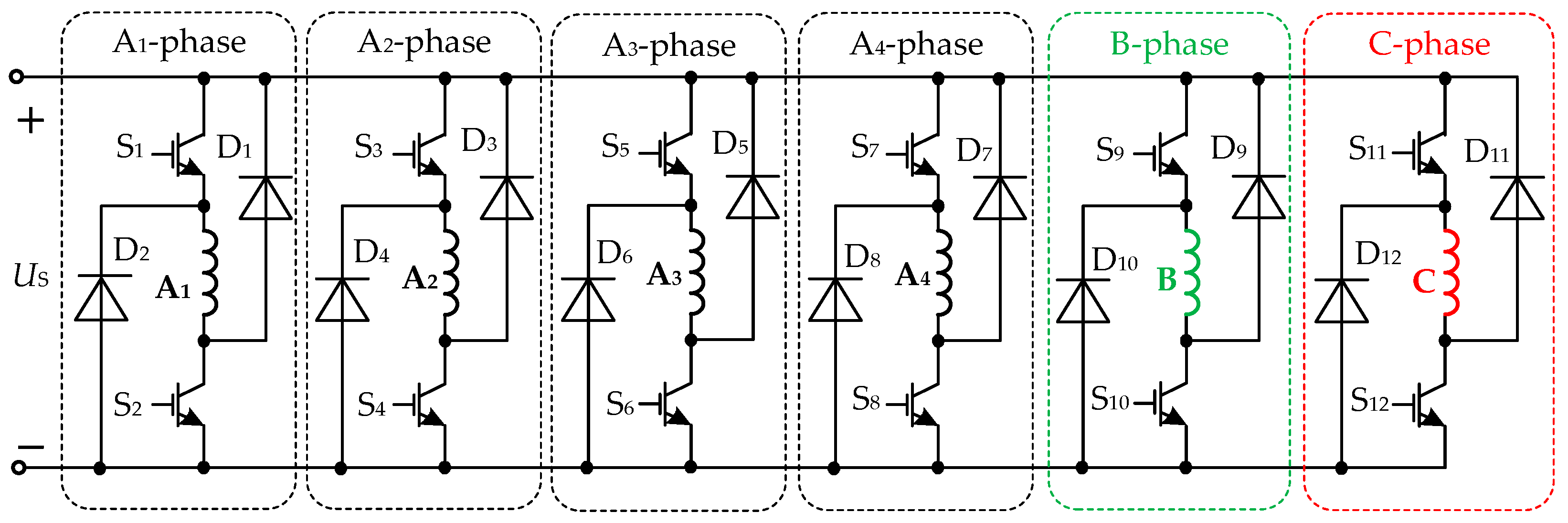
4. Control Strategy and Simulation Analysis
4.1. Control Strategy
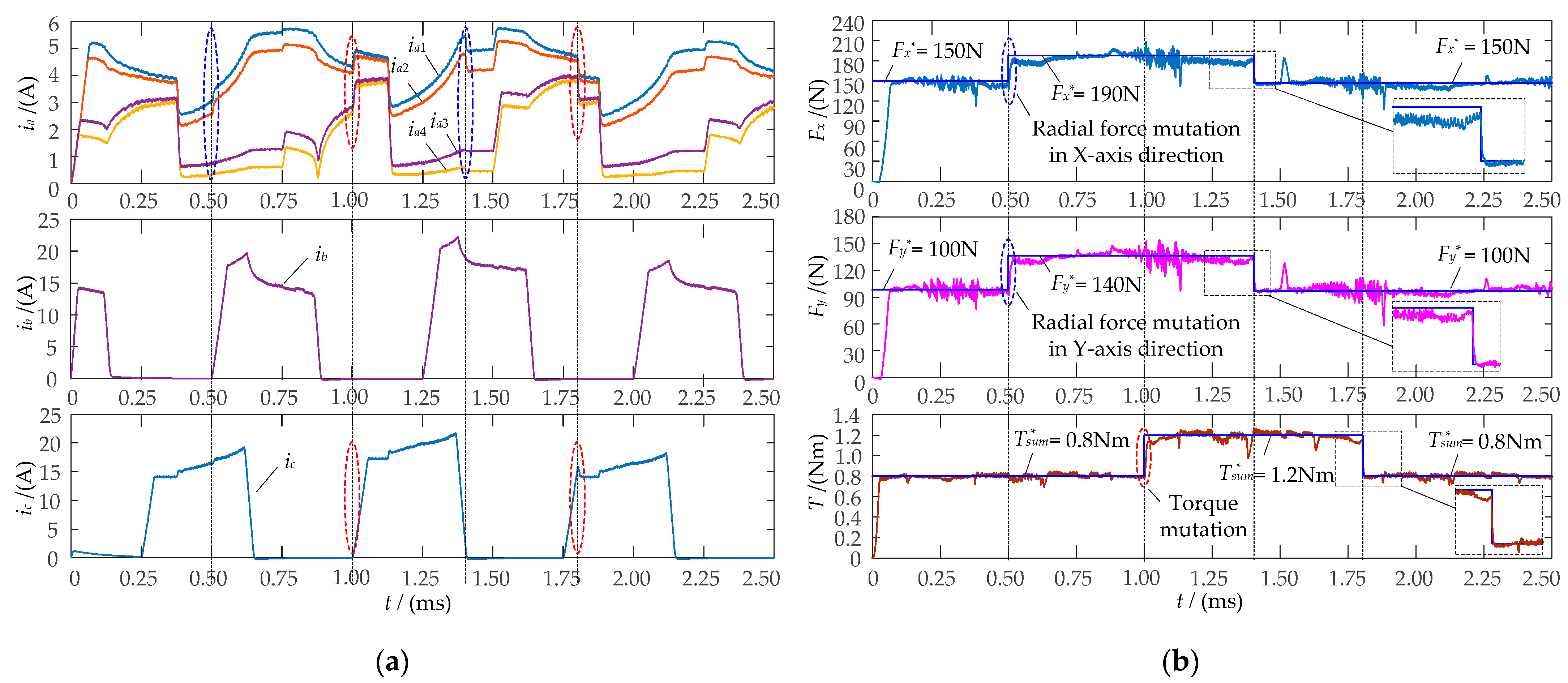
4.2. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sectors | Results of Current Calculations | Sectors | Results of Current Calculations |
|---|---|---|---|
| I | IV | ||
| II | V | ||
| III | VI |
References
- Huang, L.R.; Zhu, Z.Q.; Feng, J.H.; Guo, S.Y.; Li, Y.F.; Shi, J.X. Novel current profile of switched reluctance machines for torque density enhancement in low-speed applications. IEEE Trans. Ind. Electron. 2020, 67, 9623–9634. [Google Scholar] [CrossRef]
- Ghani, A.; Khalid, H.A.; Rehman, H. Saliency ratio-based torque enhancement of switched reluctance motors for electric bikes. Energies 2023, 16, 7320. [Google Scholar] [CrossRef]
- Sayed, E.; Abdalmagid, M.; Pietrini, G.; Sa’adeh, N.M.; Callegaro, A.D.; Goldstein, C.; Emadi, A. Review of electric machines in more-/hybrid-/turbo-electric aircraft. IEEE Trans. Transp. Electr. 2021, 7, 2976–3005. [Google Scholar] [CrossRef]
- Liaw, C.M.; Jhou, P.H.; Yang, C.W. Switched-reluctance motor drive for more electric aircraft with energy storage buffer. IEEE Trans. Aerosp Electron Syst. 2023, 59, 7423–7439. [Google Scholar] [CrossRef]
- Charl, P.; Winston, H.; Earl, G. Magnetic bearing controls for a high-speed, high-power switched reluctance machine (SRM) starter/generator. In Proceeding of SAE Power Systems Conference, San Diego, CA, USA, 31 October–2 November 2000; Society of Automotive Engineers: San Diego, CA, USA, 2000; pp. 3665–3671. [Google Scholar]
- Yang, R.; He, Z.Q.; Sugita, N.; Shinshi, T. Low-cost and compact disposable extracorporeal centrifugal blood pump utilizing a homopolar bearingless switched reluctance slice motor. IEEE Access 2023, 11, 24353–24366. [Google Scholar] [CrossRef]
- Yang, F.; Sun, Y.K.; Yuan, Y.; Huang, Y.H. A 5-degrees of freedom hybrid excitation bearingless motor for vehicle flywheel battery. Electron. Lett. 2021, 57, 909–911. [Google Scholar] [CrossRef]
- Gao, H.W.; Liu, Z.D.; Wang, X.N.; Li, D.Y.; Zhang, T.; Yu, J.H.; Wang, J.B. A novel motor structure with extended particle swarm optimization for space robot control. Sensors 2023, 23, 4126. [Google Scholar] [CrossRef]
- Takemoto, M.; Chiba, A.; Fukao, T. A method of determining advanced angle of square-wave currents in a bearingless switched motor. IEEE Trans. Ind. Applicat. 2001, 37, 1702–1709. [Google Scholar] [CrossRef]
- Takemoto, M.; Chiba, A.; Akagi, H.; Fukao, T. Radial force and torque of a bearingless switched reluctance motor operating in a region of magnetic saturation. IEEE Trans. Ind. Applicat. 2004, 40, 103–112. [Google Scholar] [CrossRef]
- Hao, Z.Y.; Zhu, T.; Cao, X.; Yu, Q.; Zhang, Q.Y. Direct displacement control for single-winding bearingless switched reluctance motor. IEEE Access 2020, 8, 211269. [Google Scholar] [CrossRef]
- Lo, Y.K.; Chiu, H.J.; Song, T.H. Elimination of voltage imbalance between the split capacitors in three-phase half-bridge switched-mode rectifiers. In Proceedings of the 4th IEEE International Conference on Power Electronics and Drive Systems, Denpasar, Indonesia, 22–25 October 2001; pp. 163–165. [Google Scholar]
- Yang, G.; Deng, Z.Q.; Cao, X.; Wang, X.L. Optimal winding arrangements of a bearingless switched reluctance motor. IEEE Trans. Power Electr. 2008, 23, 3056–3066. [Google Scholar] [CrossRef]
- Chen, L.; Hofmann, W. Speed regulation technique of one bearingless 8/6 switched reluctance motor with simpler single winding structure. IEEE Trans. Ind. Electron. 2012, 59, 2592–2600. [Google Scholar] [CrossRef]
- Yang, Y.F.; Zhang, G.X.; Wang, F.G. Design and analysis of a new bearingless switched reluctance motor. Int. J. Appl. Electrom. 2023, 71, 91–102. [Google Scholar] [CrossRef]
- Zhu, T.; Cao, X.; Yu, Q.; Deng, Z.Q.; Hao, Z.Y. Direct torque control with phase commutation optimization for single-winding bearingless switched reluctance motor. IEEE Trans. Power Electr. 2022, 37, 13238–13249. [Google Scholar] [CrossRef]
- Cao, X.; Deng, Z.Q.; Yang, G.; Wang, X.L. Independent control of average torque and radial force in bearingless switched-reluctance motors with hybrid excitations. IEEE Trans. Power Electr. 2009, 24, 1376–1385. [Google Scholar] [CrossRef]
- Guan, Z.; Zhang, F.; Ahn, J.W. High speed direct current compensation control for 8/10 bearingless SRM. In Proceeding of the IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 1934–1939. [Google Scholar]
- Xu, Z.; Lee, D.H.; Ahn, J.W. Suspending force control of a novel 12/14 hybrid stator pole type BSRM. In Proceeding of the 15th International Conference on Electrical Machines and Systems, Sapporo, Japan, 21–24 October 2012; pp. 1–5. [Google Scholar]
- Xu, Z.Y.; Huang, C.; Wang, H.J.; Lee, D.H.; Zhang, F.G. Mathematical model of stepped rotor type 12/14 bearingless switched reluctance motor based on maxwell stress method. Energy Rep. 2023, 9, 556–566. [Google Scholar] [CrossRef]
- Zhu, Z.Y.; Jiang, Y.J.; Zhu, J.; Guo, X. Performance comparison of 12/12 pole with 8/10 and 12/14 pole bearingless switched reluctance machine. Electron. Lett. 2019, 55, 327–329. [Google Scholar] [CrossRef]
- Morrison, C.R.; Siebert, M.W.; Ho, E.J. Electromagnetic forces in a hybrid magnetic-bearing switched-reluctance motor. IEEE Trans. Magn. 2008, 44, 4626–4638. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Chen, M.; Yang, Y.; Liu, C.Z.; Gao, H. A full-period mathematical model for a hybrid-rotor bearingless switched reluctance motor. Symmetry 2021, 13, 2383. [Google Scholar] [CrossRef]













| Parameter | Value |
|---|---|
| Outer diameter of stator | 105 mm |
| Inner diameter of stator | 52.5 mm |
| Stator yoke | 6.5 mm |
| Outer diameter of salient rotor | 52 mm |
| Salient rotor yoke | 6 mm |
| Shaft diameter | 25 mm |
| Stator pole arc angle | 15° |
| Salient rotor pole arc angle | 15° |
| Number of stator poles | 12 |
| Number of salient rotor poles | 8 |
| Number of winding turns | 60 |
| Number of parallel winding turns | 2 |
| Length of salient rotor stack | 75.0 mm |
| Length of cylindrical rotor stack | 25.0 mm |
| Silicon steel sheet grade | 35DW270 |
| Three Types of 12/8-Pole Structures | Power Converters Required | Power Devices Required | |||
|---|---|---|---|---|---|
| Asymmetric Half-Bridge Circuits | Three-Phase Half-Bridge Circuits | Power Switches | Diodes | Total | |
| Single-winding BSRM | 12 | 0 | 24 | 24 | 48 |
| Double-winding BSRM | 3 | 2 | 18 | 6 | 24 |
| Single-winding HBSRM in the paper | 6 | 0 | 12 | 12 | 24 |
| Sectors | Ta | Tb | Tc | Tsum |
|---|---|---|---|---|
| I | + | + | 0 | Tsum = |Ta|+|Tb| |
| II | + | 0 | 0 | Tsum = |Ta| |
| III | + | 0 | + | Tsum = |Ta|+|Tc| |
| IV | − | 0 | + | Tsum = −|Ta|+|Tc| |
| V | − | + | + | Tsum = −|Ta|+|Tb|+|Tc| |
| VI | − | + | 0 | Tsum = −|Ta|+|Tb| |
| Sectors | Given Values | Unknown Currents | No. of Constraints | Current Constraint Equations | ||
|---|---|---|---|---|---|---|
| I | 1 | |||||
| II | — | 0 | — | |||
| III | 1 | |||||
| IV | 1 | |||||
| V | , | 2 | , | |||
| VI | 1 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Wu, X.; Zhang, W.; Yang, Y.; Liu, C. Control and Analysis of a Hybrid-Rotor Bearingless Switched Reluctance Motor with One-Phase Full-Period Suspension. Symmetry 2024, 16, 369. https://doi.org/10.3390/sym16030369
Liu Z, Wu X, Zhang W, Yang Y, Liu C. Control and Analysis of a Hybrid-Rotor Bearingless Switched Reluctance Motor with One-Phase Full-Period Suspension. Symmetry. 2024; 16(3):369. https://doi.org/10.3390/sym16030369
Chicago/Turabian StyleLiu, Zeyuan, Xingcheng Wu, Wenfeng Zhang, Yan Yang, and Chengzi Liu. 2024. "Control and Analysis of a Hybrid-Rotor Bearingless Switched Reluctance Motor with One-Phase Full-Period Suspension" Symmetry 16, no. 3: 369. https://doi.org/10.3390/sym16030369
APA StyleLiu, Z., Wu, X., Zhang, W., Yang, Y., & Liu, C. (2024). Control and Analysis of a Hybrid-Rotor Bearingless Switched Reluctance Motor with One-Phase Full-Period Suspension. Symmetry, 16(3), 369. https://doi.org/10.3390/sym16030369