1. Introduction
The study of fixed points of mappings on complete metric spaces is a central topic in nonlinear analysis, and it has been considered from various perspectives. Many researchers have investigated the existence of fixed points of nonlinear mappings and their approximation techniques. They adopt a subset of Hilbert and Banach spaces as the domain of mappings. One of the most important results is Kirk’s fixed-point theorem for a nonexpansive mapping defined on a nonempty bounded closed convex subset of a reflexive Banach space having the normal structure [
1]. On the other hand, approximation schemes of fixed points have also been actively studied. A nonlinear ergodic theorem by Baillon [
2] can be regarded as an approximation scheme of a fixed point of nonexpansive mapping. The convergence of Mann’s type [
3] iterative scheme to a fixed point of a nonexpansive mapping was proved by Reich [
4]. Wittmann [
5] proved a strong convergence theorem of a Halpern’s type [
6] of iterative sequence in Hilbert spaces, and it was generalized to Banach spaces by Shioji and Takahashi [
7].
In 2004, Kirk [
8] proved the following remarkable theorem, a milestone in the history of fixed-point theory on geodesic spaces.
Theorem 1 (Kirk [
8])
. Let X be a Hadamard space and U a bounded open subset of X. Let be a nonexpansive mapping. Suppose that there exists such that for every boundary point x of U. Then T has a fixed point. This result is a fixed-point theorem for nonexpansive mapping on a complete geodesic space. After this work, many researchers have studied fixed-point theory in geodesic spaces. In particular, the techniques to approximate a fixed point of given nonexpansive or other types of mappings have been investigated, and they obtained many valuable results. Saejung [
9] got the convergence theorem of the iterative sequence generated by the Halpern scheme to the fixed point closest to a given anchor point. He, Fang, López, and Li [
10] showed a
-convergence theorem of the Mann type iterative sequence.
The shrinking projection method was first proposed by Takahashi, Takeuchi, and Kubota [
11]. There are many variations in projection methods, and it is one of the most critical schemes among them. For the recent works, see [
12,
13], for instance. This method has also been studied in the setting of complete geodesic space, and several convergence theorems were proved. Moreover, the following result was recently proved: a modified version of the shrinking projection method in a Hadamard space.
Theorem 2 (Kimura [
14])
. Let X be a Hadamard space and suppose that a subset is convex for any . Let a nonexpansive mapping with . Generate a sequence as follows: is given, , andfor . Then is Δ-convergent to . We will focus on this method in this study.
In a setting such as Banach or Hilbert spaces, some of approximate sequences mentioned above can be used to characterize the existence of a fixed point of a given mapping. In particular, the boundedness of a generated sequence often guarantees the existence of a fixed point; see [
15] and references therein.
However, in a practical calculation, it is challenging to show the boundedness of the sequence because we need to calculate infinitely many points to confirm it.
In this paper, we obtain an equivalent condition to the existence of a common fixed point of a family of nonexpansive mappings defined on a Hadamard space by generating an approximate sequence with an iterative process. Moreover, under the assumption that the space is bounded, we show that the generating process of the sequence will stop in finite steps if there is no common fixed point. We emphasize that judging the nonexistence of fixed points in a finite time is a significant advantage. As an application of our results, we also consider a convex minimization problem for a family of convex functions. The results characterize the existence of a common minimizer. We also consider the minimization problem on a given convex subset of the domain of the function.
2. Preliminaries
Let
be a metric space. We say
is a geodesic between
if
,
, and
for any
. If a geodesic
exists for any
, then
X is called a geodesic space. In particular,
X is said to be uniquely geodesic if for any
, a geodesic between them exists uniquely. In this case, the image of the geodesic
is denoted by
. In a uniquely geodesic space
X, the convex combination between two points is naturally defined; for
and
, we define
Using this notion, we can define the convexity of a subset of
X; we say
is convex if
for any
and
.
We usually define a CAT
space by using notions of geodesic triangles and comparison triangles on a model space. In this paper, we use the following definition which is equivalent to the original one. A uniquely geodesic space
X is called CAT
space if for any
and
, the inequality
holds. For the formal definition, see [
16,
17] for instance.
A Hadamard space is defined as a complete CAT(0) space. This space includes some essential classes of sets for studying nonlinear mappings and their fixed points, such as closed convex subsets of a Hilbert space, real Hilbert balls, -trees, and others. Notice that a closed convex subset of a Banach space is not necessarily a Hadamard space.
Let
X be a metric space. We say
is a fixed point of a mapping
if it satisfies
. The set of all fixed points of
T is denoted by
, that is,
A mapping
is said to be nonexpansive if
for all
. It is easy to see that
is always closed and convex if
X is a CAT(0) space.
Let
X be a Hadamard space and
be a nonempty closed convex subset of
X. It is known that, for
, there exists a unique
which is closest to
x in
C, that is,
Using this point, we define the metric projection
by
. We also know that
is a nonexpansive mapping with
.
For a bounded sequence
, we call
z an asymptotic center of
if
It is known that the asymptotic center of every bounded sequence in a Hadamard space is unique and it belongs to the closed convex hull of
.
A bounded sequence
is said to be
-convergent to
if every subsequence of
has an identical asymptotic center
. In a Hadamard space, we know that every bounded sequence has a
-convergent subsequence [
18].
For more details of Hadamard spaces and related notions, see [
17].
Let
X be a Hadamard space and
. We say
f is proper if
for some
.
f is said to be lower semicontinuous if
whenever
converges to
.
f is said to be convex if
for any
and
.
A point
is a minimizer of
f if
satisfies
The set of all minimizers of
f on a subset
is denoted by
.
3. Common Fixed Point Theorem
We consider the conditions equivalent to the existence of a common fixed point of a family of nonexpansive mappings in a Hadamard space. We begin with the following simple lemma.
Lemma 1. Let X be a Hadamard space and let be a sequence of nonempty closed convex subsets of X which is decreasing with respect to inclusion, that is, for all . Let be a sequence such that for every . If is bounded, then its asymptotic center belongs to .
Proof. Suppose that is bounded, and let be a unique asymptotic center of . Fix arbitrarily. Letting for , we have a sequence has the same asymptotic center as . From the property of , it follows that . Since is closed and convex, we have . Since is arbitrary, we obtain , the desired result. □
The following main result shows that we can characterize the existence of a common fixed point of given nonexpansive mappings by using the generating procedure of its approximate sequence.
Theorem 3. Let X be a Hadamard space and suppose that a subset of X is convex for any . Let be a family of nonexpansive mappings. Generate a sequence in X with a sequence of subsets of X by the following steps:
- Step 0.
, , and ;
- Step 1.
;
- Step 2.
(1) if , then let , increment n to 1, and go to Step 1;
(2) if , then and leave to be undefined for all , and terminate the generating process.
Then, the following conditions are equivalent:
- (a)
;
- (b)
.
Further, in this case, is well defined and Δ-convergent to some .
Proof. First we suppose
and show
. Since
for all
, the sequence
is well defined. Let
. Then, since a metric projection is nonexpansive and
, we have
for all
. It follows that a real sequence
is convergent to some non-negative number
, and that
is bounded. Let
. Since
, we have
which implies that
Letting
, we have
. Further, we obtain
as
. Thus we have
. Since
, from the definition of
, we have
for
. It implies
and thus
for every
.
On the other hand, since
is bounded, its asymptotic center is a unique point
. For each
, we have
By the uniqueness of the asymptotic center of
, we have
for every
, and hence
.
Next, we suppose that
and prove
. It is sufficient to show that
for every
. We prove this inclusion by induction. It is obvious for the case
. Suppose
and we consider the case
. Notice that, in this case,
is defined. Let
. Then, since each
is nonexpansive, we have
for each
. This fact and the assumption of induction imply
. Consequently, we obtain
and this is the desired result.
We now prove the latter part of the theorem. From the argument above, we have obtained the following:
is convergent to for each ;
is bounded;
the asymptotic center of belongs to .
Let
be an arbitrary subsequence of
. Since
is also bounded, there exists a unique asymptotic center
. We show that
is identical to the asymptotic center
of
. Since every
is a closed convex subset of
X for
, and
is a decreasing sequence with respect to inclusion, by Lemma 1, we have
Therefore, a sequence
has a limit
. It follows that
This inequality shows that
is an asymptotic center of
. From its uniqueness, we have
. Hence
is
-convergent to
. □
This result deals with a finite family of nonexpansive mappings, and we note that it can be generalized to the case of an arbitrary infinite family of mappings. We can change the proof for this case in a trivial way. However, in the view of practical calculations such as computer experiments, it is almost impossible to handle an infinite family of mappings.
4. The Case That the Underlying Space Is Bounded
In this section, we consider the case where the underlying space X is bounded. Notice that we do not assume the boundedness of X in Theorem 3. Thus, in the procedure in the theorem, might be empty even if every is nonempty, as in the following example.
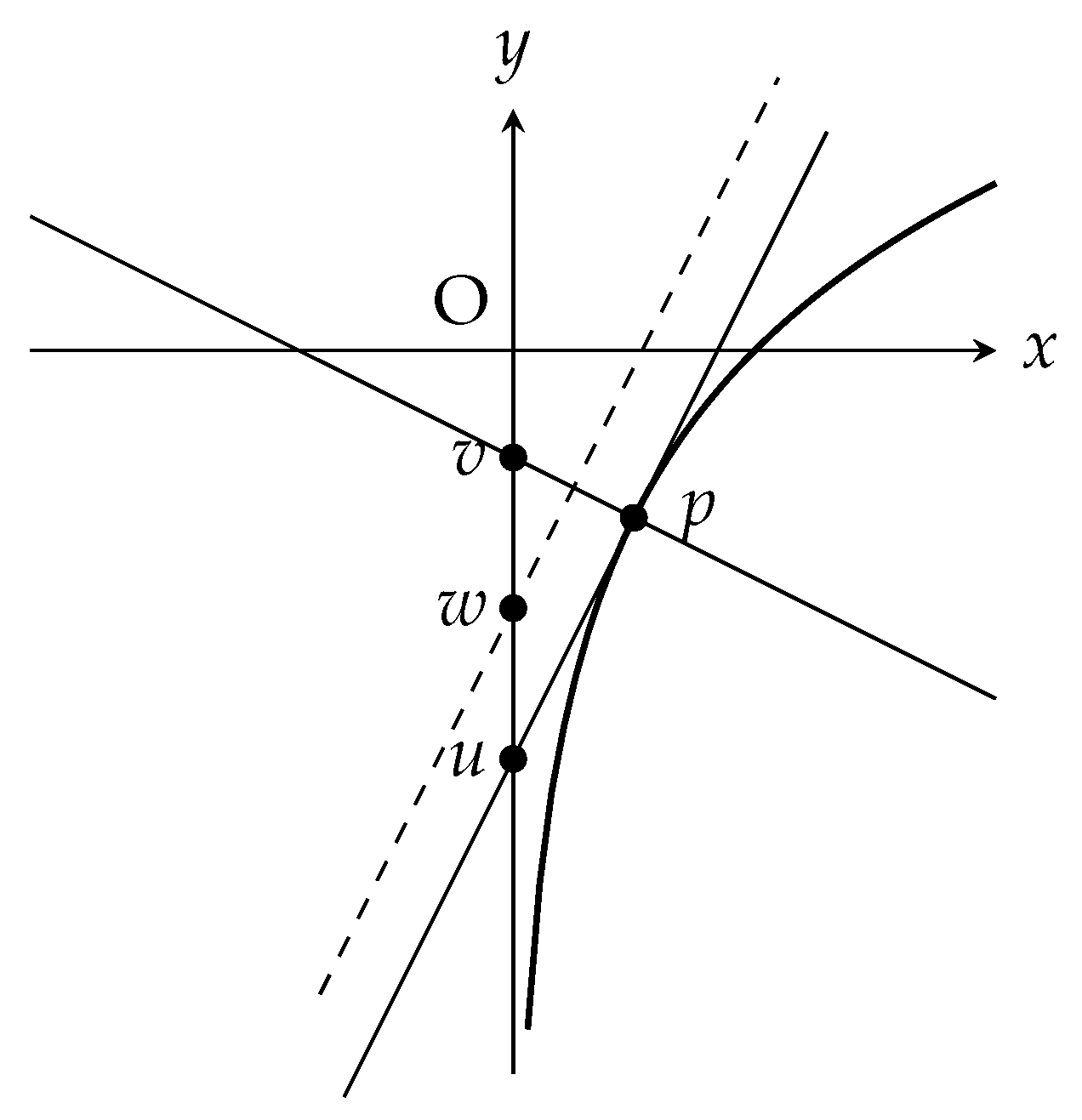
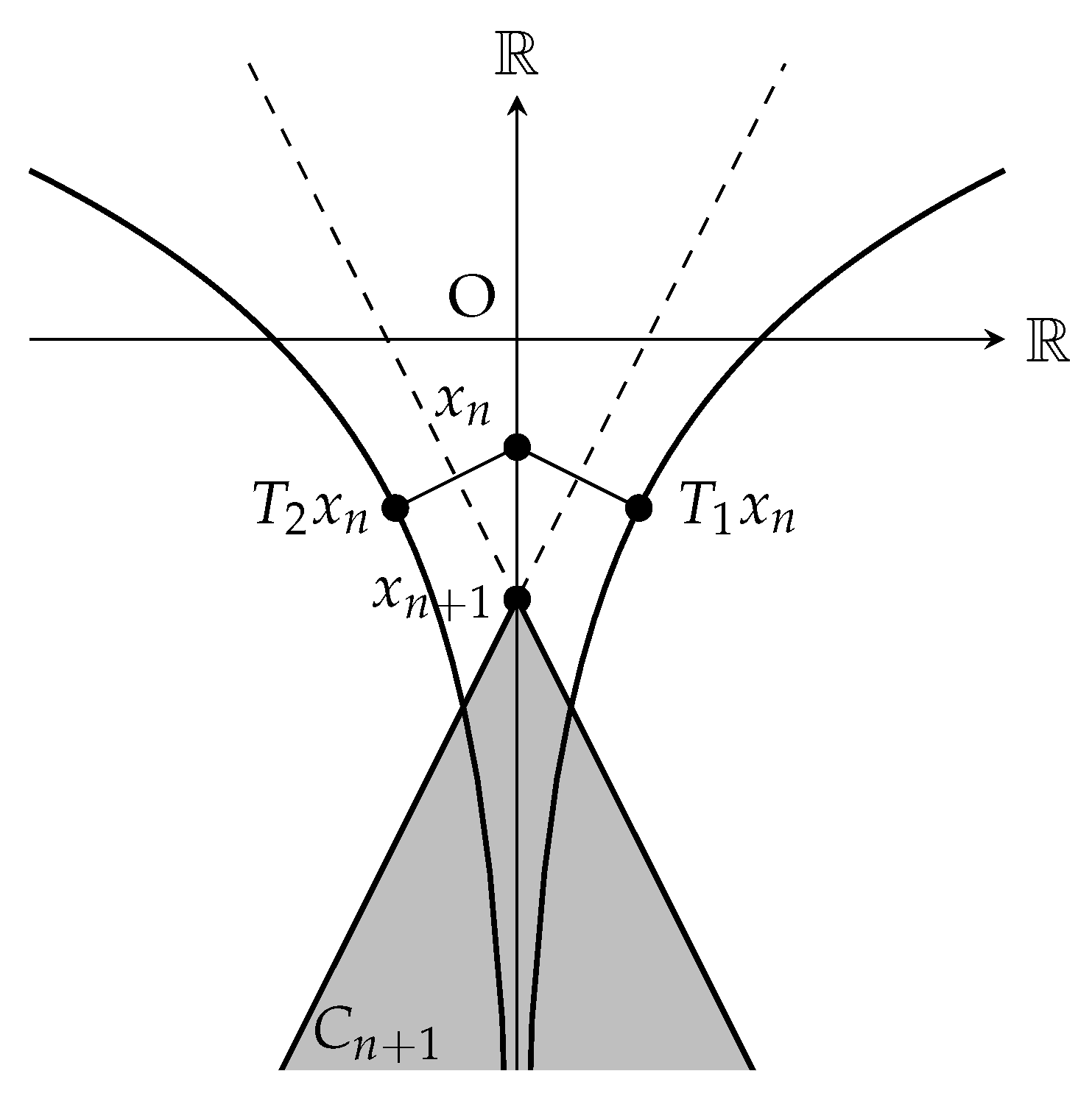
Example 1. Consider the graph of the function defined by for . Then, the tangent line of the curve at the point on the graph intersects with the y-axis at , and the normal line at p intersects with the y-axis at . The midpoint of u and v is ; see Figure 1. Using this fact, we consider the following procedure. Let and be the metric projections ontorespectively. If the initial point lies on the y-axis and we generate the sequence by the scheme in Theorem 3, then, by symmetry, every will be on y-axis if it is defined. Now, we assume that are defined and lie on the y-axis with descent order; lies below for . LetThen, by symmetry, we haveFurther, from the calculations above, can be expressed by . Since the points lie above , by the simple calculation, we obtainThis set forms a cone with the apex at , and therefore we have ; see Figure 2. Thus is on the y-axis again, and we also have From these facts, the sequence generated by this procedure with the initial point has the following properties:
Since every is defined and lies on the y-axis with descent order, the second property above implies thatas . Thus we have Suppose that the underlying space X is bounded. In this case, Kirk’s fixed-point theorem guarantees that each nonexpansive mapping has a fixed point. However, we do not know whether a finite family of mapping has a common fixed point or not.
The following result shows that we can obtain the non-existence of a common fixed point of within a finite repeating time.
Theorem 4. Let X be a bounded Hadamard space, and suppose that a subset of X is convex for any . Let be a family of nonexpansive mappings, and let be a sequence generated by the process in Theorem 3. Then, the following hold:
- (i)
If , then is Δ-convergent to ;
- (ii)
if , then there exists such that .
Proof. (i) is a direct result of Theorem 3. For (ii), we show its contrapositive; we suppose that is nonempty for all and obtain . Take a sequence such that for all . Since is bounded, it follows from Lemma 1 that its unique asymptotic center belongs to . Thus is nonempty, and hence is also nonempty by Theorem 3. This is the desired result. □
5. Applications to a Convex Minimization Problem
In this section, we attempt to apply the results discussed in the previous sections to the problem of finding a common minimizer of a family of convex functions.
Let
be a proper lower semicontinuous convex function defined on a Hadamard space
X. Then, for each
, there exists unique
such that
Using this point, we define the resolvent
of
f by
. Namely,
is a unique minimizer of the function
. It is known [
19] that
satisfies the following inequality:
for
. Moreover, since the inequality
holds for all
, we have
for
, and thus
is nonexpansive. See also [
16,
20,
21].
The resolvent operator has the following important property: the set of minimizers of f is identical to the set of fixed points of . From this fact, we can apply our results to find a common minimizer of a given family of convex functions.
Theorem 5. Let X be a Hadamard space and suppose that a subset of X is convex for any . Let be a family of proper, lower semicontinuous convex functions on X, and be the resolvent operator of for . Generate a sequence in X with a sequence of subsets of X by the following steps:
- Step 0.
, , and ;
- Step 1.
;
- Step 2.
(1) if , then let , increment n to 1, and go to Step 1;
(2) if , then and leave to be undefined for all , and terminate the generating process.
Then, the following conditions are equivalent:
- (a)
;
- (b)
.
Further, in this case, is well defined and Δ-convergent to some .
Proof. From the properties of a resolvent operator, we have
for every
. Therefore, the condition (a) is equivalent to
Applying Theorem 3 with this fact, we have the condition (a) if and only if (b), which is the desired result. The latter part of the theorem is also deduced directly. □
Next, we consider the problem of finding a minimizer of a single function
f on a given closed convex subset
D. If
f minimizes at some point
in
D, then it is a solution to the common fixed-point problem of the resolvent operator
of
f and the metric projection
onto
D. On the other hand, if every minimizer of
f does not belong to
D, then a minimizing point of
f on
D must be another point that belongs to
D. In this case, we have
From this observation, we obtain the following result related to the convex minimization problem on a given convex set.
Theorem 6. Let X be a Hadamard space and suppose that a subset of X is convex for any . Let be a proper, lower semicontinuous convex function on X, and be the resolvent operator of f. Let D be a nonempty closed convex subsets of X. Generate a sequence in X with a sequence of subsets of X by the following steps:
- Step 0.
, , and ;
- Step 1.
;
- Step 2.
(1) if , then let , increment n to 1, and go to Step 1;
(2) if , then and leave to be undefined for all , and terminate the generating process.
Then, the following conditions are equivalent:
- (a)
f minimizes at a point in D;
- (b)
.
Further, in this case, the sequence is well defined and Δ-convergent to some .
Furthermore, if we assume that X is bounded, then D is also bounded and thus always has a minimizer, that is, . We can use Theorem 4 to check whether this minimizer is also a global minimizer of f.
Theorem 7. Let X be a bounded Hadamard space, and suppose that a subset of X is convex for any . Let be a proper lower semicontinuous convex function on X, and let be a sequence generated by the process in Theorem 5. Then, the following hold:
- (i)
If f minimizes at some point in D, then is Δ-convergent to ;
- (ii)
If f does not minimize at any point in D, then there exists such that .
6. Conclusions
In this paper, we study the existence of a common fixed point of a family of nonexpansive mapping defined on a Hadamard space. Using an iterative scheme by a projection method, we obtained an equivalent condition to the existence of a common fixed point.
The sequence of subsets in Theorem 3 may have an empty intersection even if each is not empty. We showed this fact in Example 1. However, if the whole space is bounded, then implies that some is empty. This fact tells us that the generating process of the iterative sequence will stop in finite steps if there is no common fixed point. Therefore, the advantage of this method is that we can find the emptiness of a common fixed point of mappings can be revealed in a finite time.
These results can be applied to convex minimization problems. We discussed this problem and obtained several results deduced from our main results.



{kind=link}
{kind=link}

