
Macroscopic and Multi-Scale Models for Multi-Class Vehicular Dynamics with Uneven Space Occupancy: A Case Study



Abstract
:1. Introduction
1.1. State of the Art
- Different driving modes (e.g., autonomous vs. classic);
- Different origins and destinations;
- Different lengths (i.e., space occupied);
- Different velocities/flux functions;
- Reserved roads or reserved entry/exit lanes.
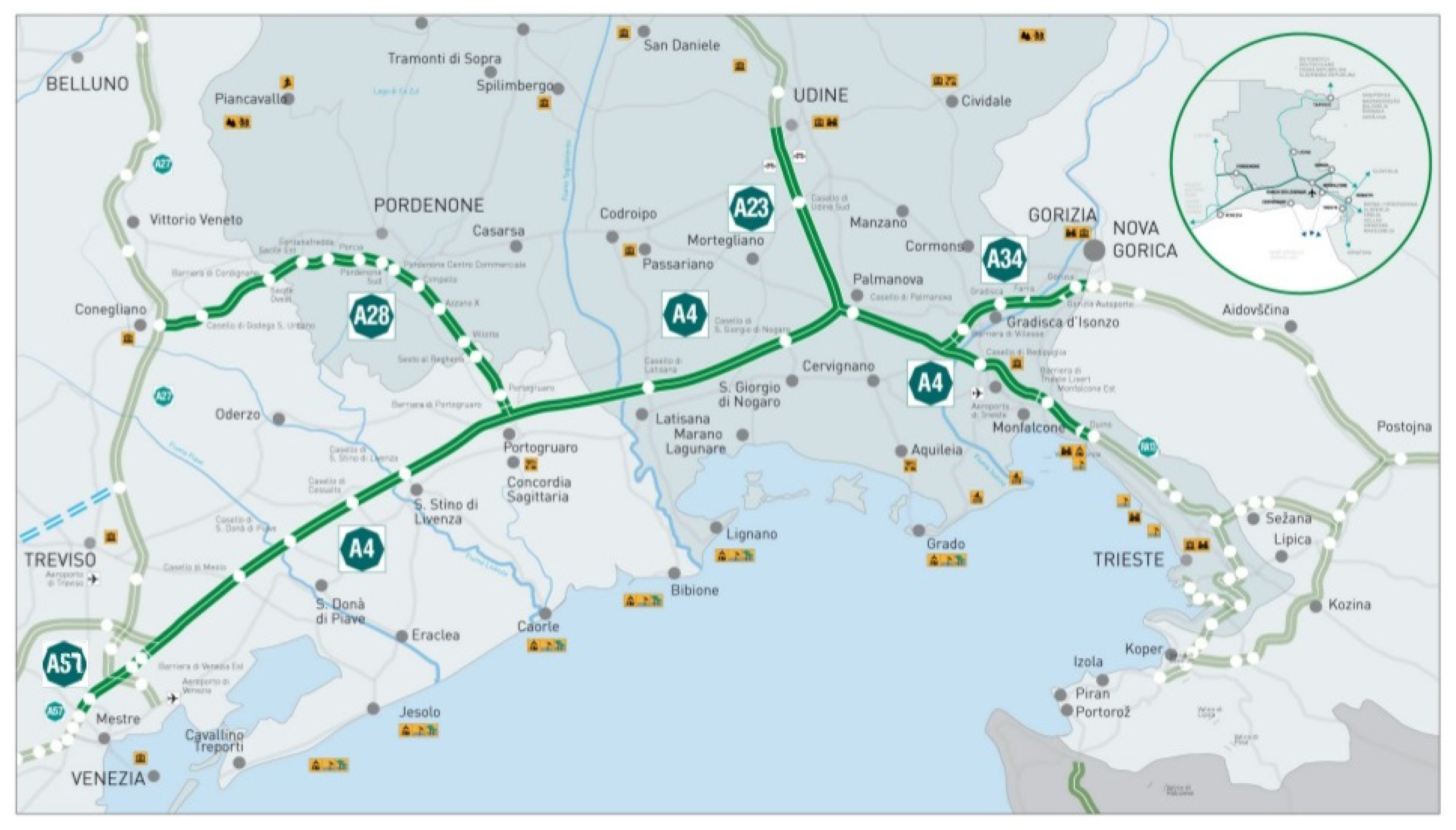
1.2. Case Study
1.3. Our Contribution
- The first model is purely macroscopic. Both cars and truck are described by two coupled first-order LWR-based models. Fundamental diagrams are shaped in order to allow cars to move even in the presence of fully congested trucks. Considering that the fundamental diagram of each class is influenced by the presence of the other class, in the case of unstable (rapidly varying) traffic conditions of one class, we observe a scattered behavior in the fundamental diagram of the other class. Numerical results will show that this feature allows the model to catch, at least in part, some second-order (inertial) phenomena in traffic behavior, such as stop and go waves.
- The second model is multi-scale. Cars are described by a first-order LWR-based model, while trucks are described by a second-order microscopic follow-the-leader model. For trucks, we consider the microscopic model used in [3], inspired, in turn, by a model originally proposed in [33] and specifically designed to reproduce stop and go waves. The choice of second-order model for trucks is crucial, since inertia effects are not at all negligible for those vehicles, while they are less important in car dynamics. Finally, note that, since trucks are confined to only one lane and cannot overtake, their dynamics perfectly matches the constituting assumptions of the follow-the-leader model.
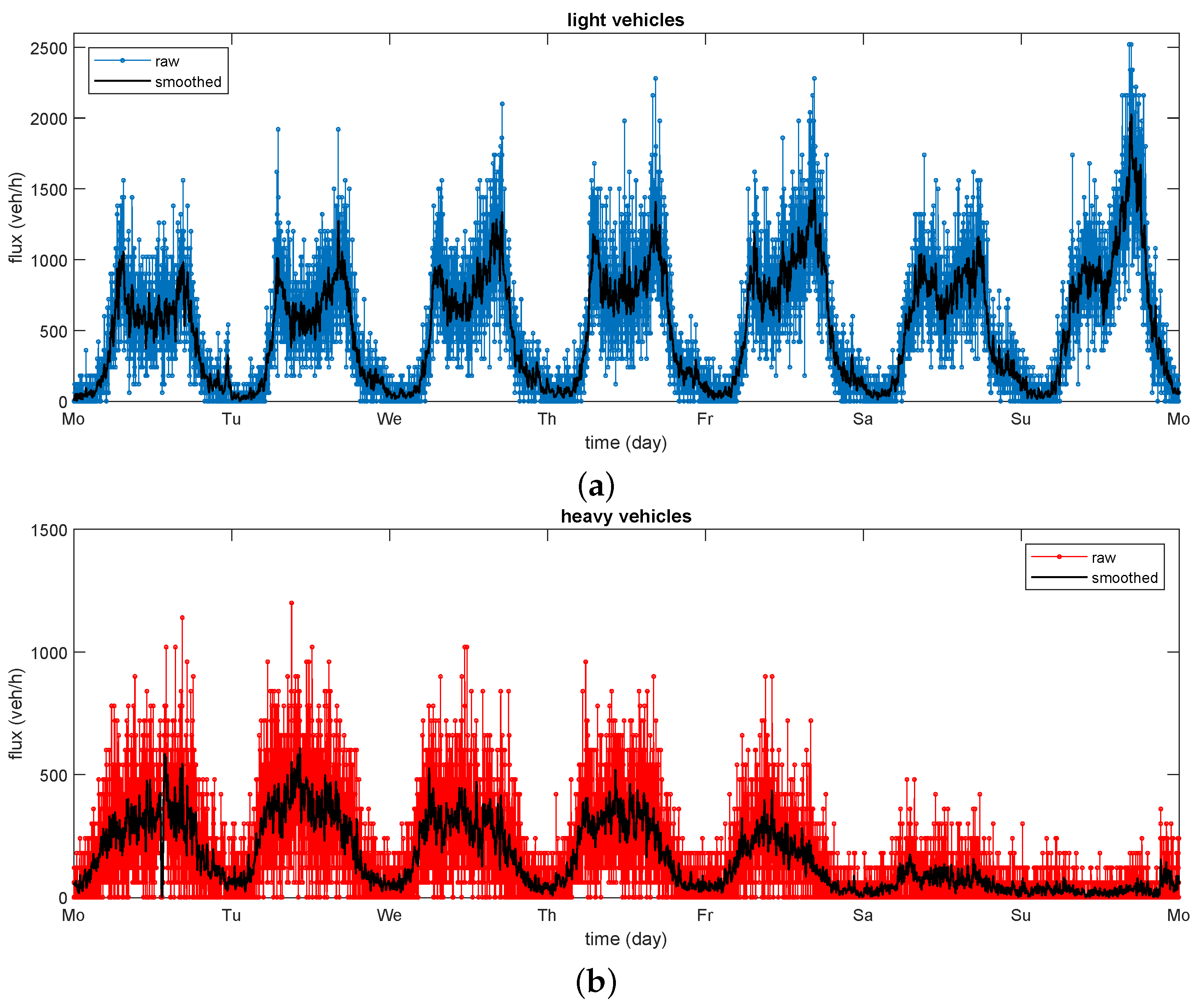
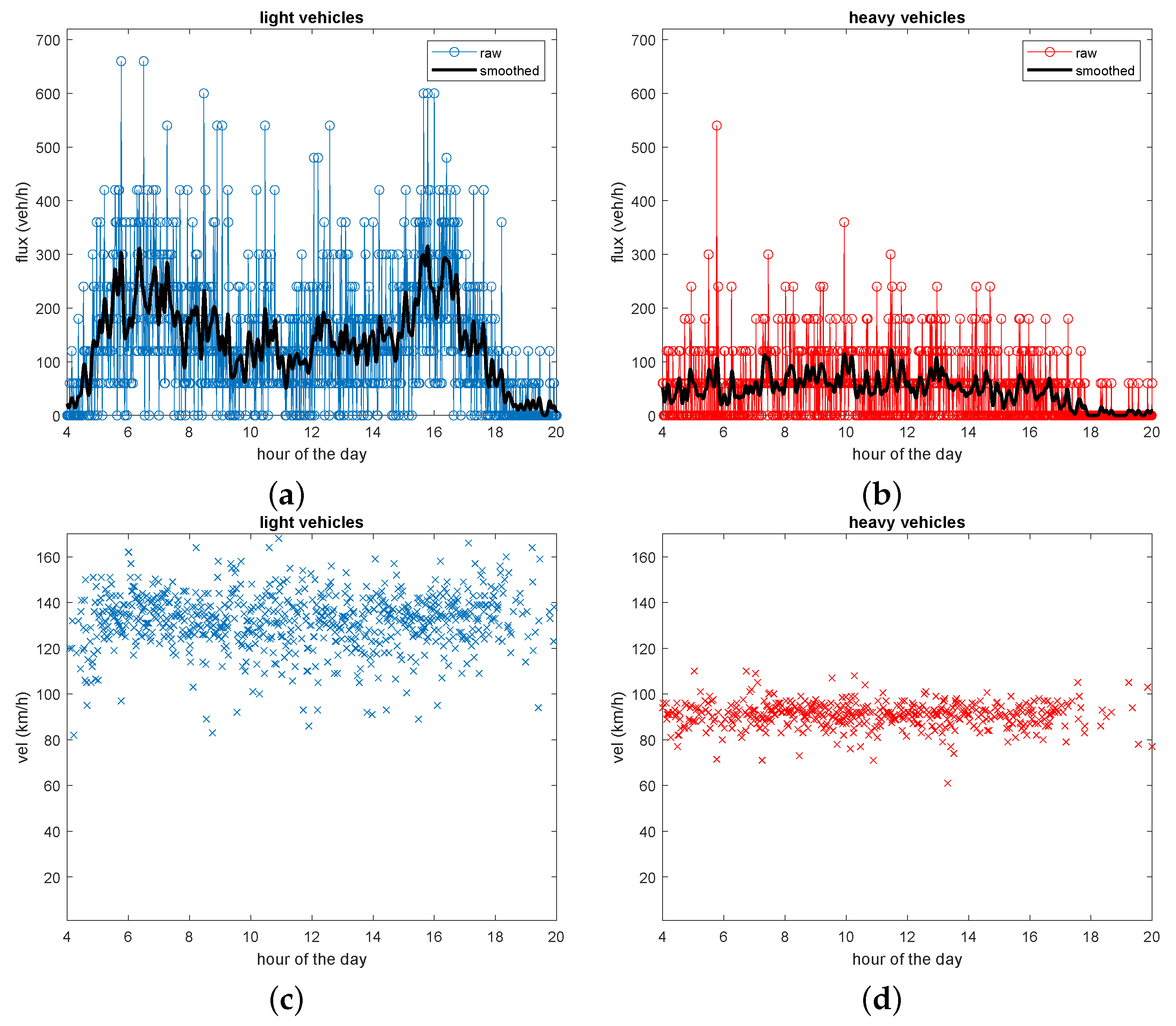
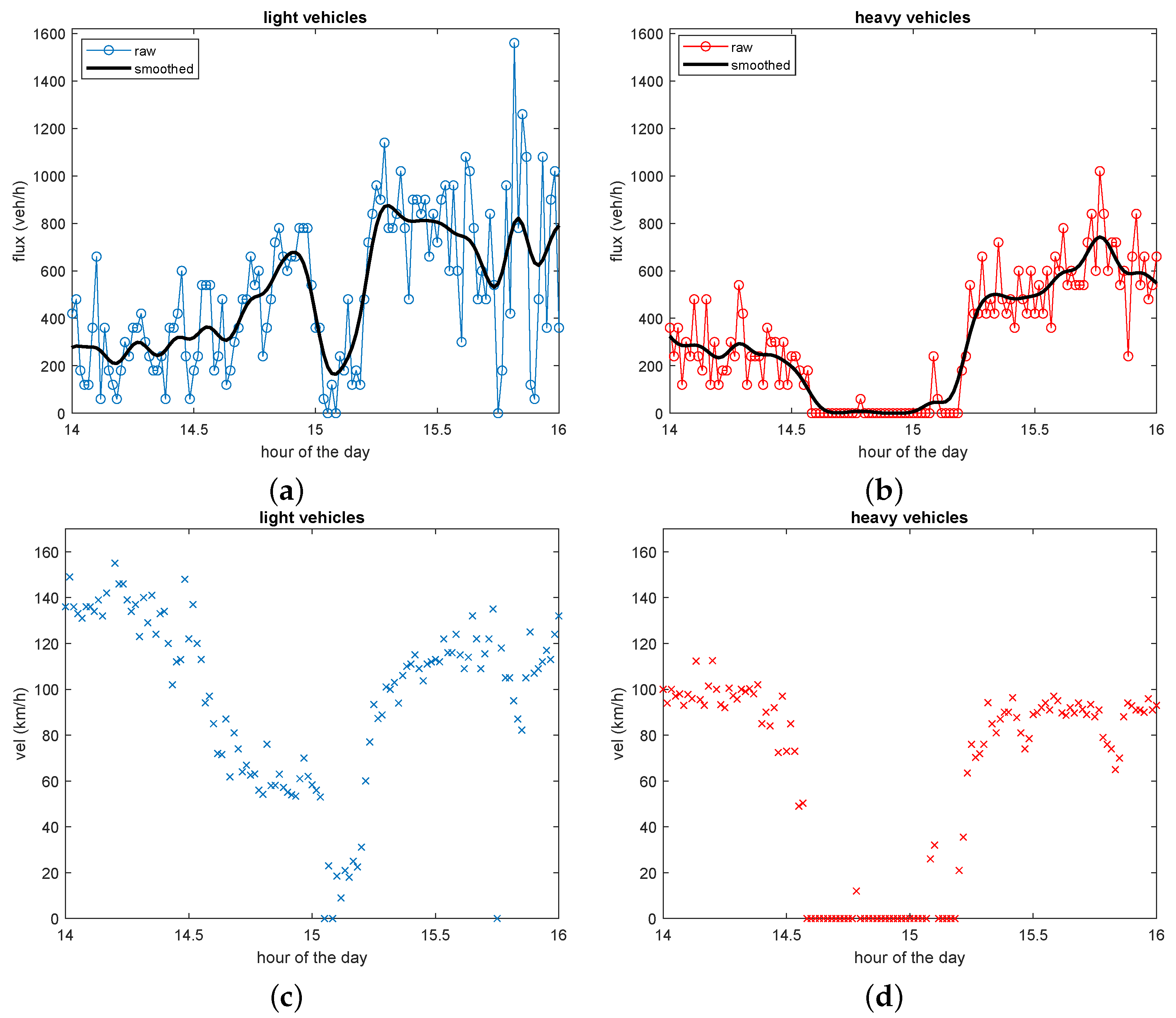
2. Dataset
3. Models
3.1. Macroscopic Model
- (L1)
- for all and iff , whereis the maximum admissible car density given the truck density ;
- (L2)
- is a decreasing function with respect to and ;
- (L3)
- and for all ;
- (L4)
- is concave with respect to for any . We definewhich represents, as usual, the interface between freeflow and congested regimes;
- (L5)
- is a decreasing function with respect to for any .
- (H1)
- for all and iff , whereis the maximum admissible truck density given the car density ;
- (H2)
- is a decreasing function with respect to and ;
- (H3)
- and for all ;
- (H4)
- is concave with respect to for any . We definewhich represents, as usual, the interface between freeflow and congested regimes;
- (H5)
- is a decreasing function with respect to for any .
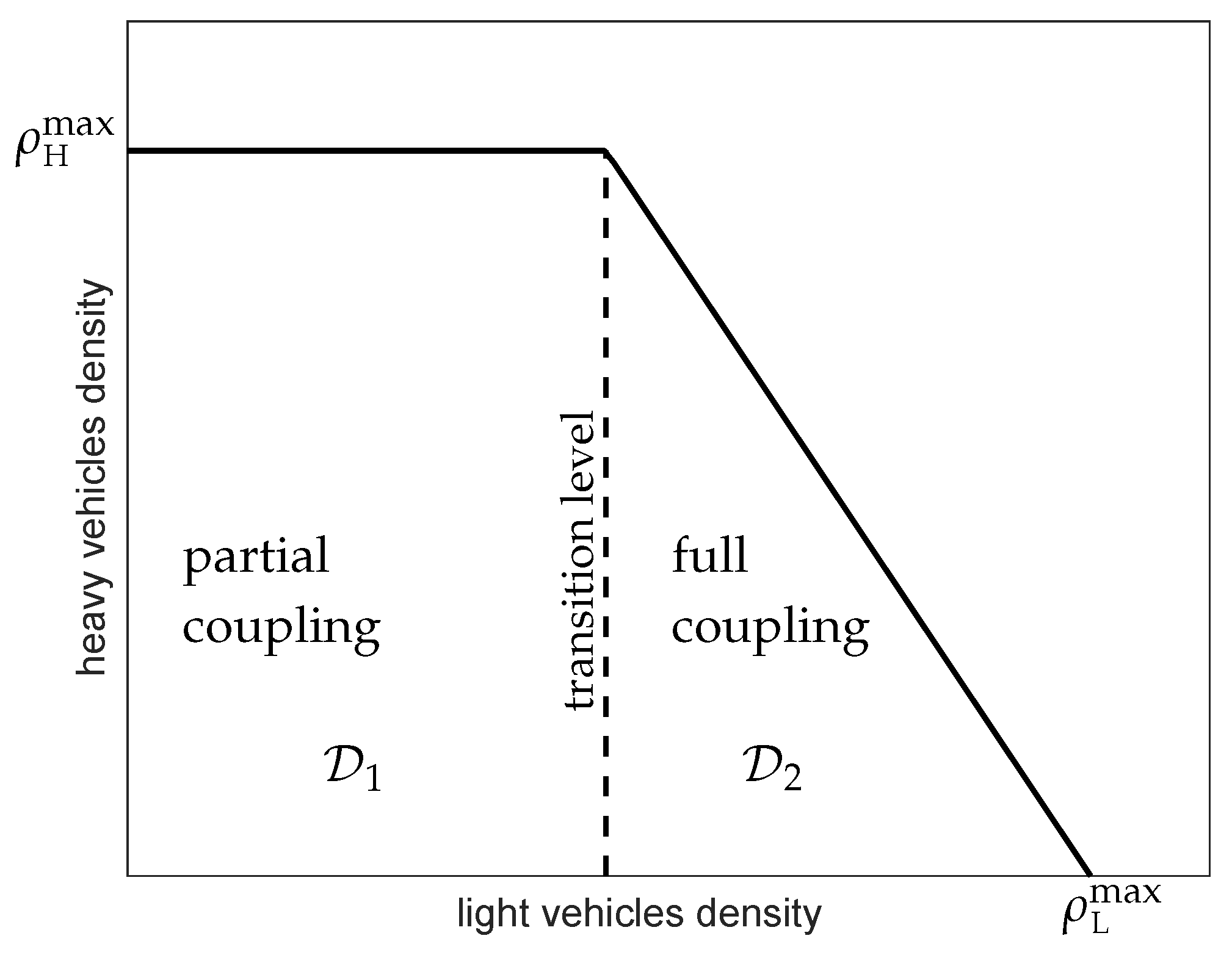
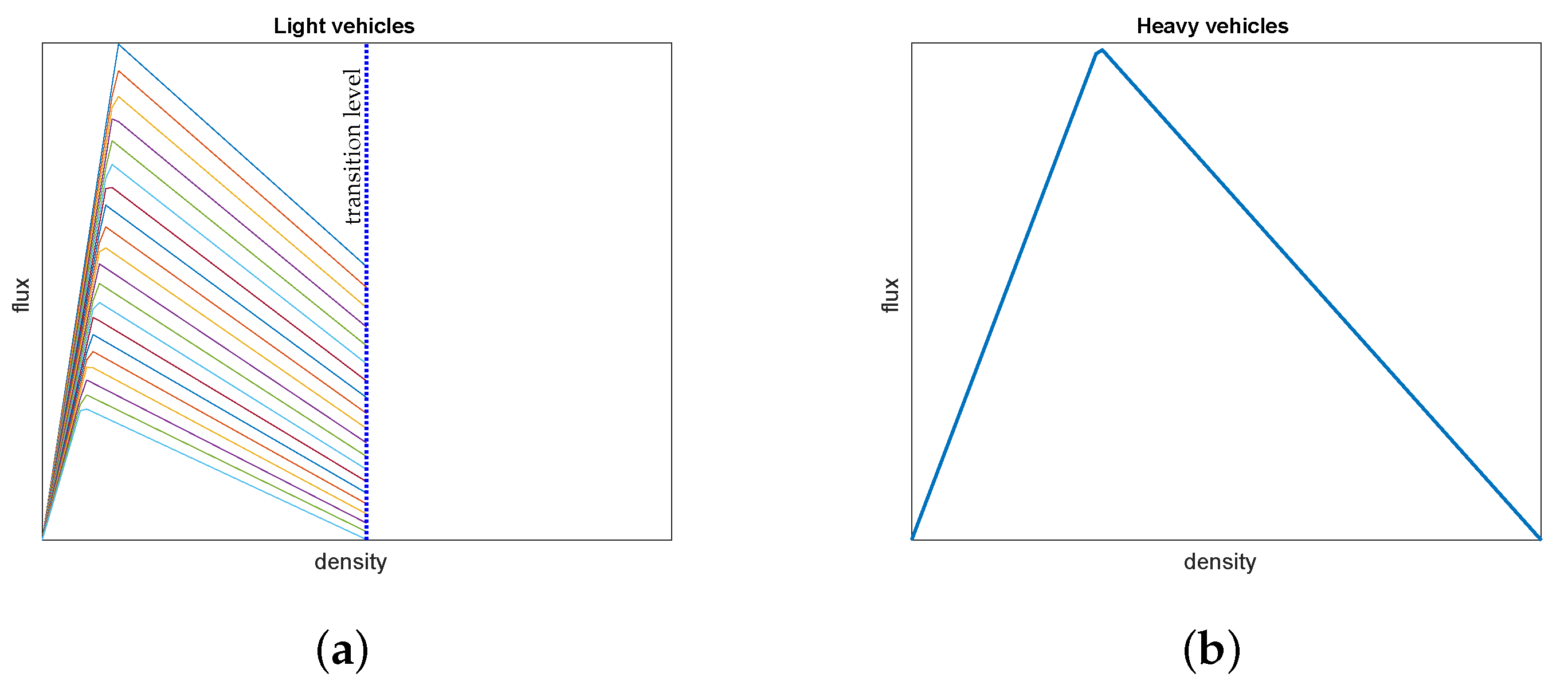
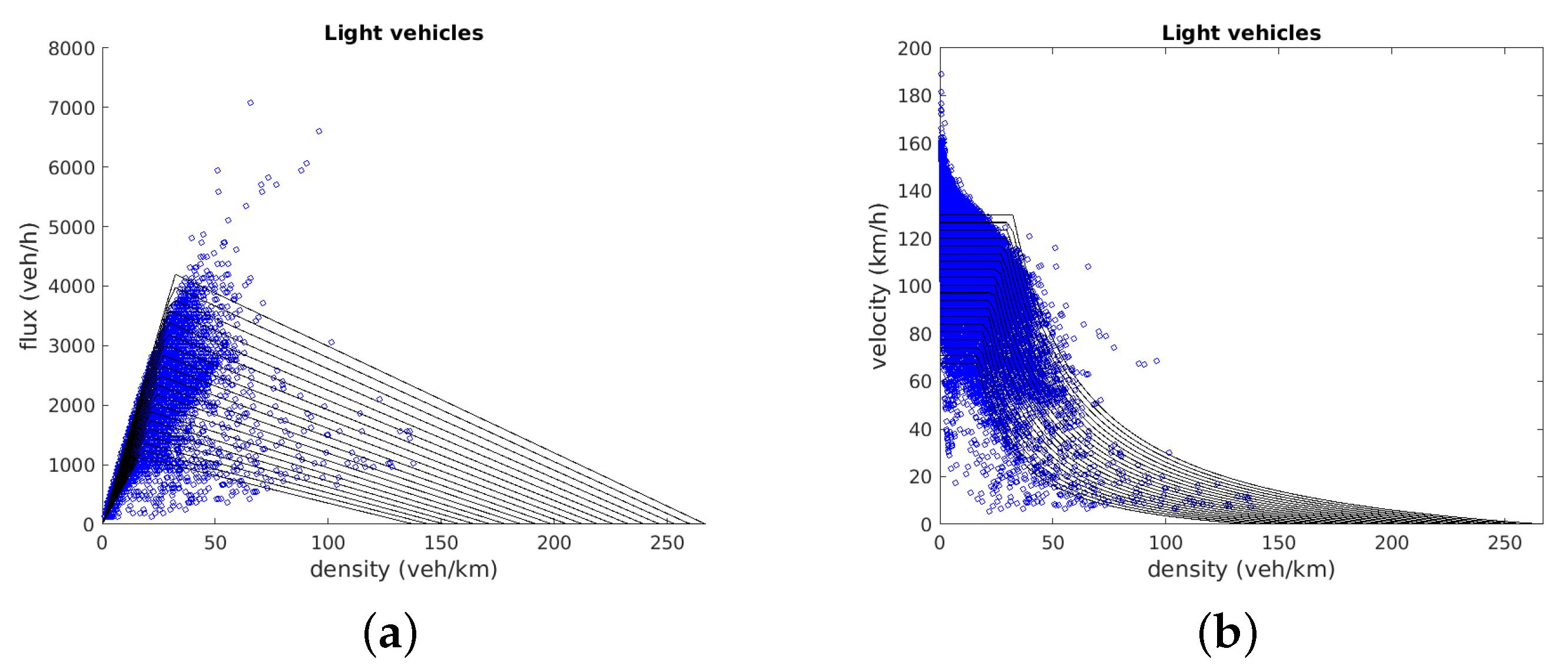
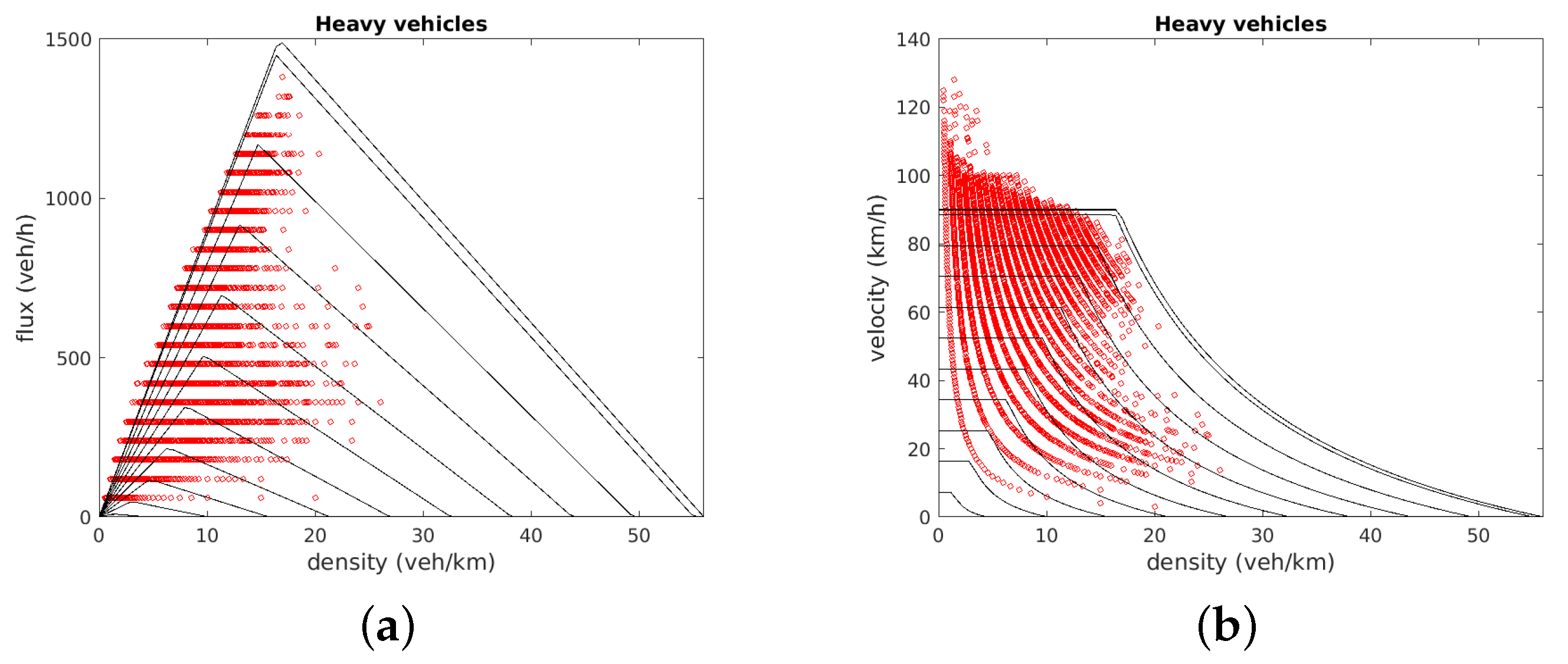
- In this phase, we assume that cars are mainly in the fast lane and do not affect the truck dynamics. Trucks are then independent from cars.For trucks, we choose a triangular fundamental diagram withwhere is the maximum speed of trucks, see Figure 6b.Cars do not interfere with trucks but adapt their dynamics to the presence of them. Moreover, for cars, we choose (a family of) triangular fundamental diagrams, see Figure 6a. Specifically, we setwhere is the maximum speed of cars given the truck density. We also define as the maximum speed of cars in the absence of trucks. Then, and are continuous linear decreasing functions of .
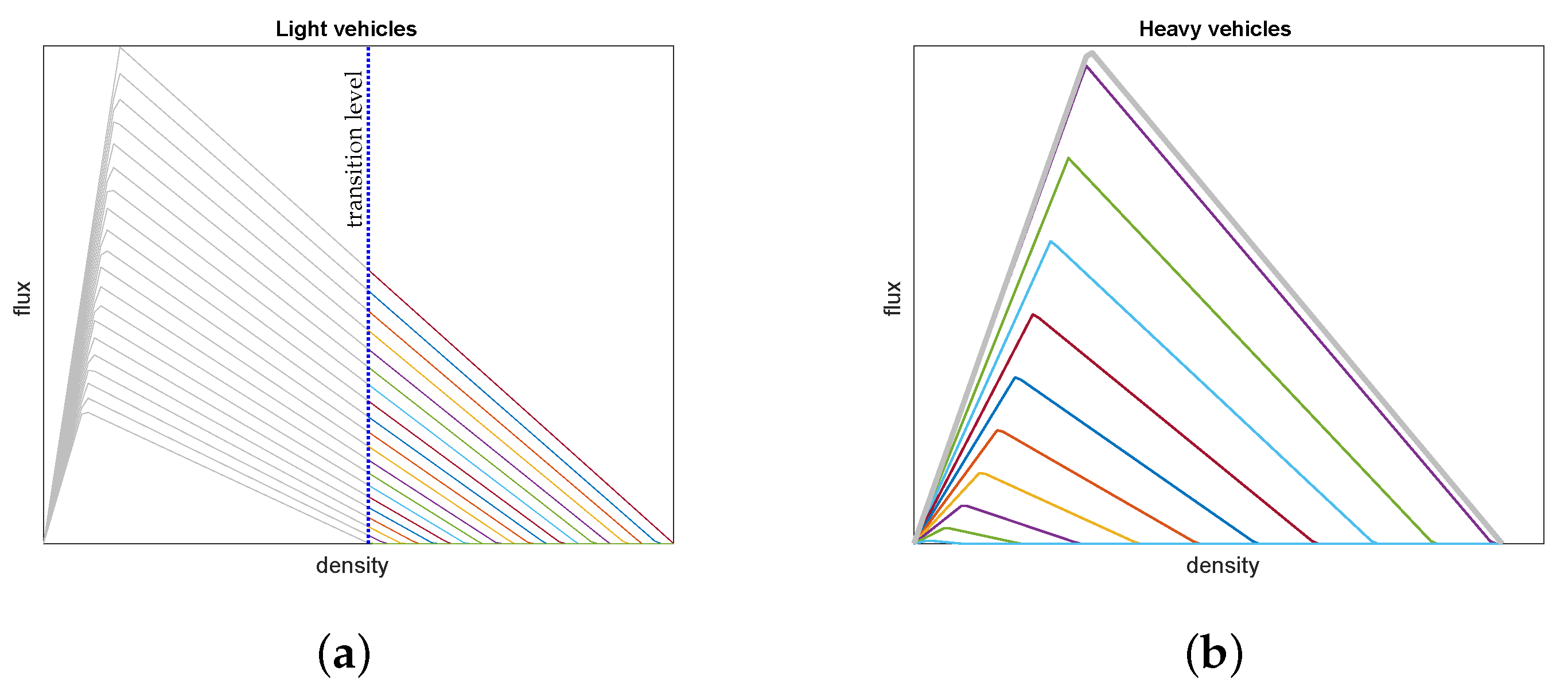
- The full coupling phase is in place when , see Figure 5. In this case, we assume that there are too many cars to find it convenient to be confined to the fast lane. For this reason, they invade the slow lane, thus influencing the dynamics of trucks. The two equations in system (9) are then fully coupled.As before, we choose for both classes a family of triangular fundamental diagrams which extend, by continuity, those defined in , as shown in Figure 7.
3.2. Multi-Scale Model
3.2.1. Microscopic Model for Heavy Vehicles
3.2.2. Full Model
3.3. Extension of the Models to General Road Networks
3.3.1. Any Number of Lanes
3.3.2. Junctions
4. Numerical Approximation and Calibration
4.1. Macroscopic Model
4.2. Multi-Scale Model
5. Numerical Results
5.1. Macroscopic Model
5.1.1. Test 1A: Creeping
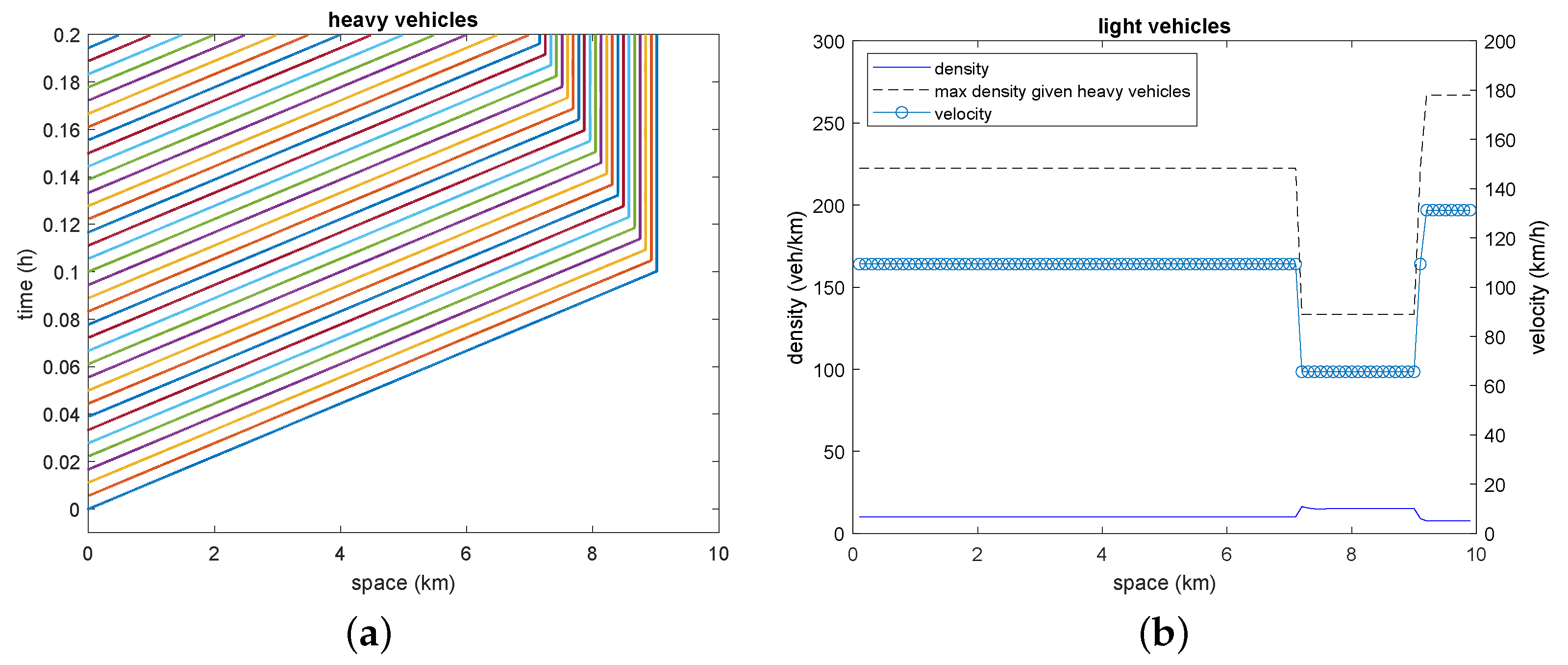
5.1.2. Test 2A: Cars’ Congestion Affects Truck Dynamics
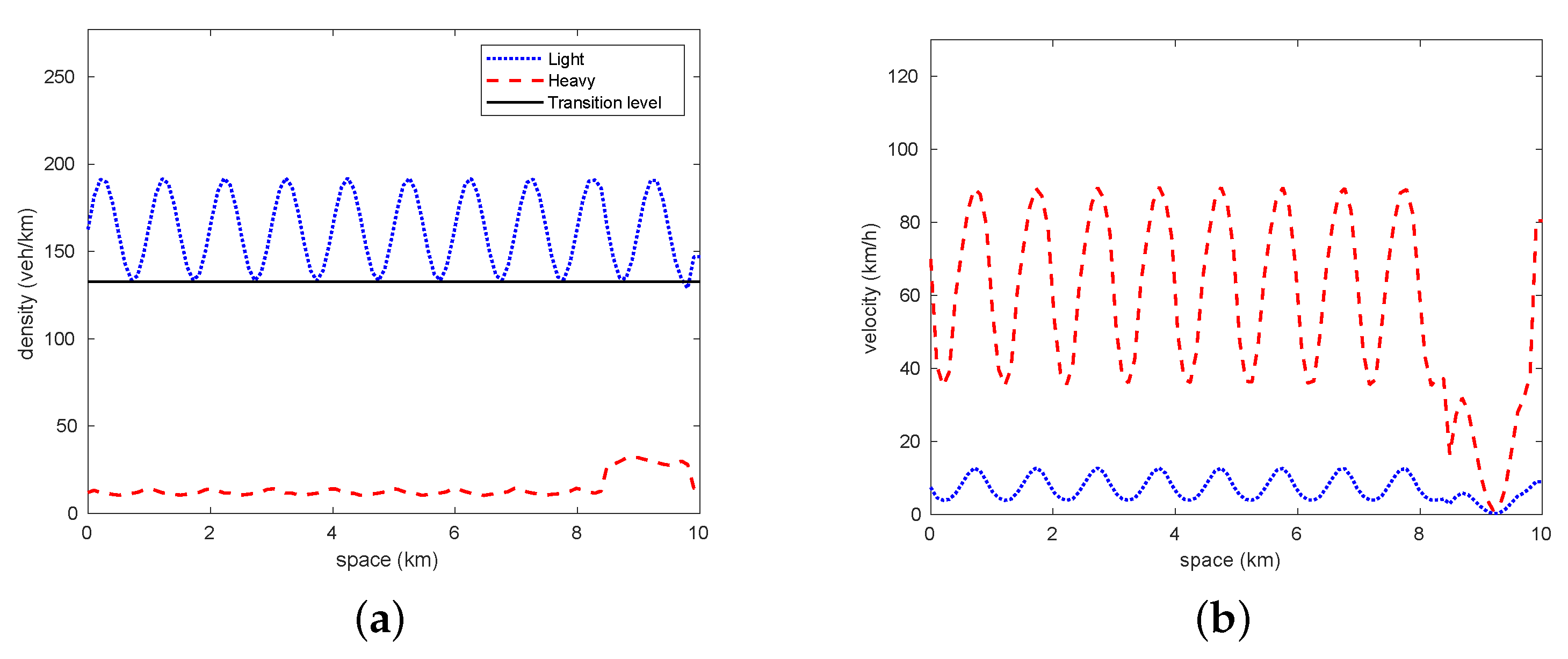
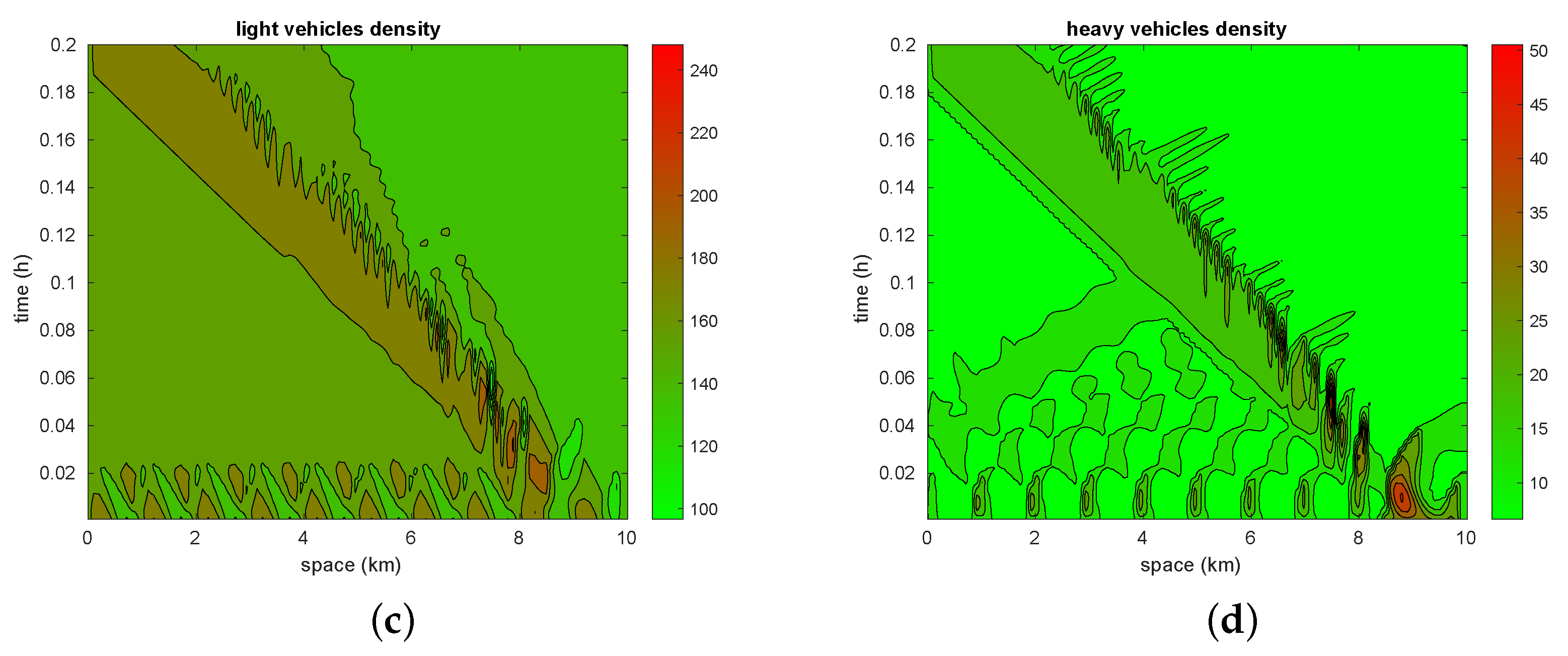
5.1.3. Test 3A: Stop and Go Wave
5.2. Multi-Scale Model
5.2.1. Test 1B: Creeping Effect
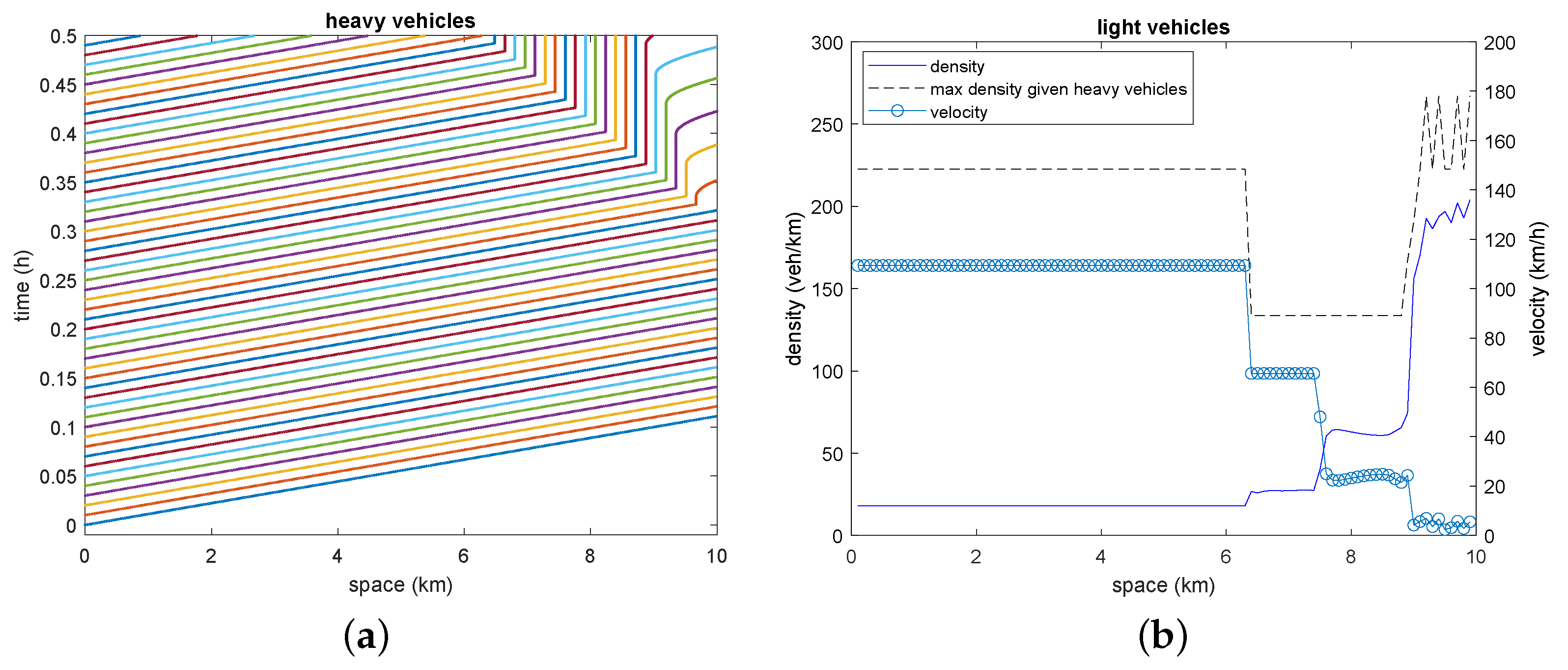
5.2.2. Test 2B: Cars’ Congestion Affects Truck Dynamics
5.2.3. Test 3B: Merge
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lighthill, M.J.; Whitham, G.B. On kinematic waves II. A theory of traffic flow on long crowded roads. Proc. R. Soc. Lond. Ser. A 1955, 229, 317–345. [Google Scholar] [CrossRef]
- Richards, P.I. Shock waves on the highway. Oper. Res. 1956, 4, 42–51. [Google Scholar] [CrossRef]
- Cristiani, E.; Iacomini, E. An interface-free multi-scale multi-order model for traffic flow. Discret. Contin. Dyn. Syst. Ser. B 2019, 24, 6189–6207. [Google Scholar] [CrossRef] [Green Version]
- Garavello, M.; Piccoli, B. Traffic Flow on Networks; American Institute of Mathematical Sciences: Springfield, MO, USA, 2006. [Google Scholar]
- Coclite, G.M.; Garavello, M.; Piccoli, B. Traffic flow on a road network. SIAM J. Math. Anal. 2005, 36, 1862–1886. [Google Scholar] [CrossRef] [Green Version]
- Holden, H.; Risebro, H. A mathematical model of traffic flow on a network of unidirectional roads. SIAM J. Math. Anal. 1995, 26, 999–1017. [Google Scholar] [CrossRef] [Green Version]
- Bressan, A.; Nguyen, K.T. Conservation law models for traffic flow on a network of roads. Netw. Heterog. Media 2015, 10, 255–293. [Google Scholar] [CrossRef]
- Garavello, M.; Goatin, P. The Cauchy problem at a node with buffer. Discret. Contin. Dyn. Syst. Ser. A 2012, 32, 1915–1938. [Google Scholar] [CrossRef]
- Herty, M.; Lebacque, J.P.; Moutari, S. A novel model for intersections of vehicular traffic flow. Netw. Heterog. Media 2009, 4, 813–826. [Google Scholar] [CrossRef]
- Bretti, G.; Briani, M.; Cristiani, E. An easy-to-use algorithm for simulating traffic flow on networks: Numerical experiments. Discret. Contin. Dyn. Syst. Ser. S 2014, 7, 379–394. [Google Scholar] [CrossRef] [Green Version]
- Briani, M.; Cristiani, E. An easy-to-use algorithm for simulating traffic flow on networks: Theoretical study. Netw. Heterog. Media 2014, 9, 519–552. [Google Scholar] [CrossRef] [Green Version]
- Hilliges, M.; Weidlich, W. A phenomenological model for dynamic traffic flow in networks. Transp. Res. Part B 1995, 29, 407–431. [Google Scholar] [CrossRef]
- Briani, M.; Cristiani, E.; Iacomini, E. Sensitivity analysis of the LWR model for traffic forecast on large networks using Wasserstein distance. Commun. Math. Sci. 2018, 16, 123–144. [Google Scholar] [CrossRef] [Green Version]
- Fan, S.; Work, D.B. A heterogeneous multiclass traffic flow model with creeping. SIAM J. Appl. Math. 2015, 75, 813–835. [Google Scholar] [CrossRef]
- van Wageningen-Kessels, F. Framework to assess multiclass continuum traffic flow models. Transp. Res. Rec. 2016, 2553, 150–160. [Google Scholar] [CrossRef] [Green Version]
- (Sean) Qian, Z.; Li, J.; Li, X.; Zhang, M.; Wang, H. Modeling heterogeneous traffic flow: A pragmatic approach. Transp. Res. Part B 2017, 99, 183–204. [Google Scholar] [CrossRef]
- Ferrara, A.; Sacone, S.; Siri, S. Freeway Traffic Modelling and Control; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Kessels, F. Traffic Flow Modelling; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Agarwal, A.; Lämmel, G. Modeling seepage behavior of smaller vehicles in mixed traffic conditions using an agent based simulation. Transp. Dev. Econ. 2016, 2, 8. [Google Scholar] [CrossRef] [Green Version]
- Benzoni-Gavage, S.; Colombo, R.M. An n-populations model for traffic flow. Eur. Jnl Appl. Math. 2003, 14, 587–612. [Google Scholar] [CrossRef]
- Balzotti, C.; Göttlich, S. A two-dimensional multi-class traffic flow model. Netw. Heterog. Media 2021, 16, 69–90. [Google Scholar] [CrossRef]
- Fan, S.; Seibold, B. Data-fitted first-order traffic models and their second-order generalizations. Comparison by trajectory and sensor data. Transp. Res. Rec. 2013, 2391, 32–43. [Google Scholar] [CrossRef]
- Fan, S.; Herty, M.; Seibold, B. Comparative model accuracy of a data-fitted generalized Aw-Rascle-Zhang model. Netw. Heterog. Media 2014, 9, 239–268. [Google Scholar] [CrossRef]
- Klar, A.; Günther, M.; Wegener, R.; Materne, T. Multivalued fundamental diagrams and stop and go waves for continuum traffic flow equations. SIAM J. Appl. Math. 2004, 64, 468–483. [Google Scholar] [CrossRef]
- Herty, M.; Illner, R. Coupling of non-local driving behaviour with fundamental diagrams. Kinet. Relat. Models 2012, 5, 843–855. [Google Scholar] [CrossRef]
- Ni, D.; Hsieh, H.K.; Jiang, T. Modeling phase diagrams as stochastic processes with application in vehicular traffic flow. Appl. Math. Model. 2018, 53, 106–117. [Google Scholar] [CrossRef]
- Paipuri, M.; Leclercq, L. Bi-modal macroscopic traffic dynamics in a single region. Transp. Res. Part B 2020, 133, 257–290. [Google Scholar] [CrossRef]
- Puppo, G.; Semplice, M.; Tosin, A.; Visconti, G. Fundamental diagrams in traffic flow: The case of heterogeneous kinetic models. Commun. Math. Sci. 2016, 14, 643–669. [Google Scholar] [CrossRef] [Green Version]
- Visconti, G.; Herty, M.; Puppo, G.; Tosin, A. Multivalued fundamental diagrams of traffic flow in the kinetic Fokker–Planck limit. Multiscale Model. Simul. 2017, 15, 1267–1293. [Google Scholar] [CrossRef]
- Wang, H.; Ni, D.; Chen, Q.Y.; Li, J. Stochastic modeling of the equilibrium speed-density relationship. J. Adv. Transp. 2013, 47, 126–150. [Google Scholar] [CrossRef] [Green Version]
- Fan, S.; Sun, Y.; Piccoli, B.; Seibold, B.; Work, D.B. A collapsed generalized Aw-Rascle-Zhang model and its model accuracy. arXiv 2017, arXiv:1702.03624. [Google Scholar]
- Bretti, G.; Cristiani, E.; Lattanzio, C.; Maurizi, A.; Piccoli, B. Two algorithms for a fully coupled and consistently macroscopic PDE-ODE system modeling a moving bottleneck on a road. Math. Eng. 2018, 1, 55–83. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, H.M. A unified follow-the-leader model for vehicle, bicycle and pedestrian traffic. Transp. Res. Part B 2017, 105, 315–327. [Google Scholar] [CrossRef]
- Colombo, R.M. Hyperbolic phase transitions in traffic flow. SIAM J. Appl. Math. 2002, 63, 708–721. [Google Scholar] [CrossRef]
- Colombo, R.M.; Goatin, P.; Piccoli, B. Road networks with phase transitions. J. Hyperbolic Differ. Eq. 2010, 7, 85–106. [Google Scholar] [CrossRef] [Green Version]
- Delle Monache, M.L.; Chi, K.; Chen, Y.; Goatin, P.; Han, K.; Qiu, J.; Piccoli, B. Three-phase fundamental diagram from three-dimensional traffic data. Axioms 2021, 10, 17. [Google Scholar] [CrossRef]
- Cristiani, E.; Sahu, S. On the micro-to-macro limit for first-order traffic flow models on networks. Netw. Heterog. Media 2016, 11, 395–413. [Google Scholar] [CrossRef] [Green Version]
- Calvert, S.C.; van Wageningen-Kessels, F.L.M.; Hoogendoorn, S.P. Capacity drop through reaction times in heterogeneous traffic. J. Traffic Transp. Eng. 2018, 5, 96–104. [Google Scholar] [CrossRef]
- Colombo, R.M.; Marcellini, F. A traffic model aware of real time data. Math. Models Methods Appl. Sci. 2016, 26, 445–467. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Light Vehicles | Heavy Vehicles | |
|---|---|---|
| veh. length + safety dist. (km) | ||
| max max density (veh/km) | ||
| min max density (veh/km) | ||
| max max speed (km/h) | ||
| min max speed (km/h) | ||
| max max flux (veh/h) | ||
| min max flux (veh/h) |
| km | ||
| km | ||
| km | ||
| 90 | km/h | |
| h | ||
| h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Briani, M.; Cristiani, E.; Ranut, P. Macroscopic and Multi-Scale Models for Multi-Class Vehicular Dynamics with Uneven Space Occupancy: A Case Study. Axioms 2021, 10, 102. https://doi.org/10.3390/axioms10020102
Briani M, Cristiani E, Ranut P. Macroscopic and Multi-Scale Models for Multi-Class Vehicular Dynamics with Uneven Space Occupancy: A Case Study. Axioms. 2021; 10(2):102. https://doi.org/10.3390/axioms10020102
Chicago/Turabian StyleBriani, Maya, Emiliano Cristiani, and Paolo Ranut. 2021. "Macroscopic and Multi-Scale Models for Multi-Class Vehicular Dynamics with Uneven Space Occupancy: A Case Study" Axioms 10, no. 2: 102. https://doi.org/10.3390/axioms10020102
APA StyleBriani, M., Cristiani, E., & Ranut, P. (2021). Macroscopic and Multi-Scale Models for Multi-Class Vehicular Dynamics with Uneven Space Occupancy: A Case Study. Axioms, 10(2), 102. https://doi.org/10.3390/axioms10020102