
Local and Global Stability of Certain Mixed Monotone Fractional Second Order Difference Equation with Quadratic Terms


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction and Preliminaries
- (a)
- is non-increasing in the first and non-decreasing in the second variable.
- (b)
- Equation (2) has no minimal period-two solutions in I.
- (i)
- Eventually, they are both monotonically increasing.
- (ii)
- Eventually, they are both monotonically decreasing.
- (iii)
- One of them is monotonically increasing, and the other is monotonically decreasing.
- (a)
- is non-increasing in both variables in ;
- (b)
- If is a solution of the systemthen .
- 1.
- There exists a solution of (5), called a full limiting sequence of , such that , and such that for every , is a limit point of . In particular
- 2.
- For every , there exists a subsequence of the solution such that
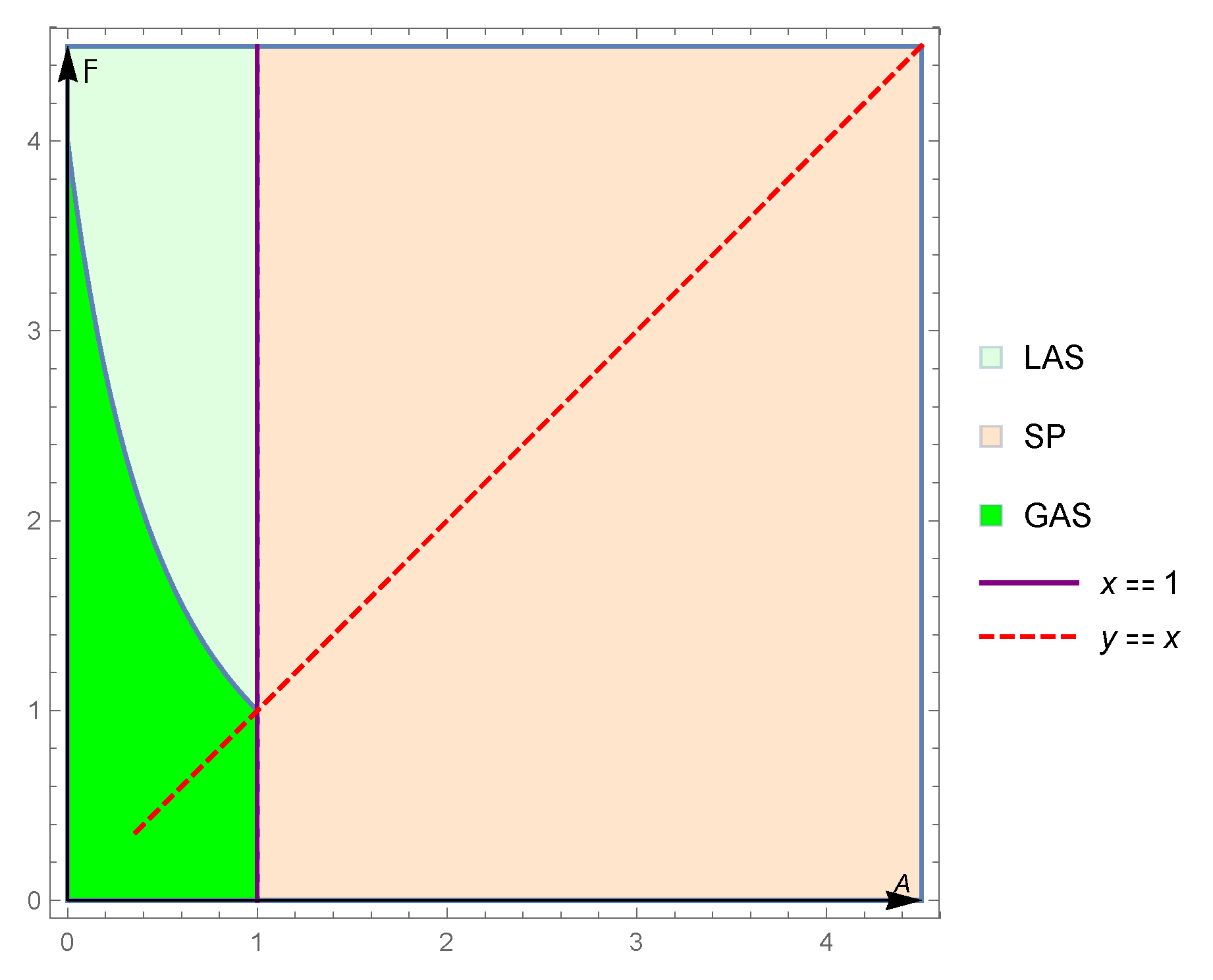
2. The Equilibrium Point and Linearized Stability
- (i)
- locally asymptotically stable (LAS) if ,
- (ii)
- a saddle point (SP) if ,
- (iii)
- a non-hyperbolic (NH) if , with eigenvaluesand we have
3. The Minimal Period-Two Solutions
4. Global Results
4.1. Case 1 ()
- 1.
- If , then:(a) if then ;(b) if then .
- 2.
- If , then:(a) if then ;(b) if then .
4.2. Case 2 ()
4.3. Case
- (a)
- if , then ,
- (b)
- if , then .
- (a)
- then by Lemma 9, , for , so for . Namely, if the subsequence is increasing and bounded above by and the subsequence is decreasing and bounded below by .
- (b)
- then by Lemma 9, , for , so for . Namely, if the subsequence is decreasing and bounded below by and the subsequence is increasing and bounded above by .
- (c)
- then by Lemma 9 for , .
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baleanu, D.; Sajjadi, S.S.; Jajarmi, A.; Defterli, Ö. On a nonlinear dynamical system with both chaotic and non-chaotic behaviours: A new fractional analysis and control. Adv. Differ. Equ. 2021, 234, 1–7. [Google Scholar]
- Baleanu, D.; Sajjadi, S.S.; Asad, J.H.; Jajarmi, A.; Estiri, E. Hyperchaotic behaviours, optimal control, and synchronization of a nonautonomous cardiac conduction system. Adv. Differ. Equ. 2021, 157, 1–24. [Google Scholar]
- Khalid, M.; Samikhan, F. Stability analysis of deterministic mathematical model for Zika virus. Br. J. Math. Comput. Sci. 2016, 19, 1–10. [Google Scholar] [CrossRef]
- Rezapour, S.; Mohammadi, H.; Jajarmi, A. A new mathematical model for Zika virus transmission. Adv. Differ. Equ. 2020, 589. [Google Scholar] [CrossRef]
- Kostrov, Y.; Kudlak, Z. On a second-order rational difference equation with a quadratic term. Int. J. Differ. Equ. 2016, 11, 179–202. [Google Scholar]
- Hrustić, S.; Kulenović, M.R.S.; Moranjkić, S.; Nurkanović, Z. Global dynamics of perturbation of certain rational difference equation. Turk. J. Math. 2019, 43, 894–915. [Google Scholar] [CrossRef]
- Nurkanović, Z.; Nurkanović, M.; Garić-Demirović, M. Stability and Neimark-Sacker Bifurcation of Certain Mixed Monotone Rational Second-Order Difference Equation. Qual. Theory Dyn. Syst. 2021, 20, 1–41. [Google Scholar] [CrossRef]
- Bektašević, J.; Kulenović, M.R.S.; Pilav, P. Asymptotic approximations of a stable and unstable manifolds of a two-dimensional quadratic map. J. Comp. Anal. Appl. 2016, 21, 35–51. [Google Scholar]
- Kulenović, M.R.S.; Merino, O. A global attractivity result for maps with invariant boxes. Discret. Contin. Dyn. Syst.-B 2006, 6, 97–110. [Google Scholar] [CrossRef]
- Camouzis, E.; Ladas, G. When does local asymptotic stability imply global attractivity in rational equations. J. Differ. Equ. Appl. 2006, 14, 863–885. [Google Scholar] [CrossRef]
- Kulenović, M.R.S.; Merino, O. Discrete Dynamical Systems and Difference Equations with Mathematica; Chapman and Hall/CRC: Boca Raton, FL, USA; London, UK, 2002. [Google Scholar]
- Kulenović, M.R.S.; Ladas, G. Dynamics of Second Order Rational Difference Equations with Open Problems and Conjectures; Chapman and Hall/CRC: Boca Raton, FL, USA; London, UK, 2001. [Google Scholar]
- Grove, E.A.; Ladas, G. Periodicities in nonlinear difference equations. In Advances in Discrete Mathematics and Applications; Chapman and Hall/CRC: Boca Raton, FL, USA; London, UK, 2005. [Google Scholar]
- Elaydi, S. Discrete Chaos; Chapman and Hall/CRC: Boca Raton, FL, USA; London, UK; New York, NY, USA, 2000. [Google Scholar]
- Garić-Demirović, M.; Hrustić, S.; Moranjkić, S. Global dynamics of certain non-symmetric second-order difference equation with quadratic terms. Sarajevo J. Math. 2019, 15, 155–167. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garić-Demirović, M.; Hrustić, S.; Nurkanović, Z. Local and Global Stability of Certain Mixed Monotone Fractional Second Order Difference Equation with Quadratic Terms. Axioms 2021, 10, 288. https://doi.org/10.3390/axioms10040288
Garić-Demirović M, Hrustić S, Nurkanović Z. Local and Global Stability of Certain Mixed Monotone Fractional Second Order Difference Equation with Quadratic Terms. Axioms. 2021; 10(4):288. https://doi.org/10.3390/axioms10040288
Chicago/Turabian StyleGarić-Demirović, Mirela, Sabina Hrustić, and Zehra Nurkanović. 2021. "Local and Global Stability of Certain Mixed Monotone Fractional Second Order Difference Equation with Quadratic Terms" Axioms 10, no. 4: 288. https://doi.org/10.3390/axioms10040288
APA StyleGarić-Demirović, M., Hrustić, S., & Nurkanović, Z. (2021). Local and Global Stability of Certain Mixed Monotone Fractional Second Order Difference Equation with Quadratic Terms. Axioms, 10(4), 288. https://doi.org/10.3390/axioms10040288