
A Novel Investigation of Non-Periodic Snap BVP in the

 , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
2. Preliminaries
| Algorithm 1: MATLAB lines for getting the qth —integral of function . |
|
| Algorithm 2: MATLAB lines for getting qth -Caputo derivative of function . |
|
- 1.
- ;
- 2.
- ;
- 3.
- ;
- 4.
- ;
- 5.
- , .
3. Existence-Uniqueness Results
- Step 1:
- The continuity of the operator is obtained by applying the dominated convergence theorem and noting that the function is jointly continuous.
- Step 2:
- We show that is uniformly bounded, whereis an open ball with radius . For , we easily deduce thatThen, for any and , we can obtainandSimilarly, we haveandFrom the above inequalities, we obtainindependently of the element , which implies that is uniformly bounded.
- Step 3:
- Now, we show that is equicontinuous. Let such thatand , we deduceandSimilarly, we haveAdditionally, we haveFrom the above inequalities, we obtainas independently of , which implies that is equicontinuous. Using the Arzelà–Ascoli theorem, we deduce that is compact on . If there exist and such that , thenwhich draws a contradiction.
4. Stability Criterion
- (i)
- Definition 2 ⇒ Definition 1, if ;
- (ii)
- Definition 3 ⇒ Definition 4, if =;
- (iii)
- Definition 3 ⇒ Definition 1, if .
- (i)
- , ,
- (ii)
- .
- (i)
- ,
- (ii)
- .
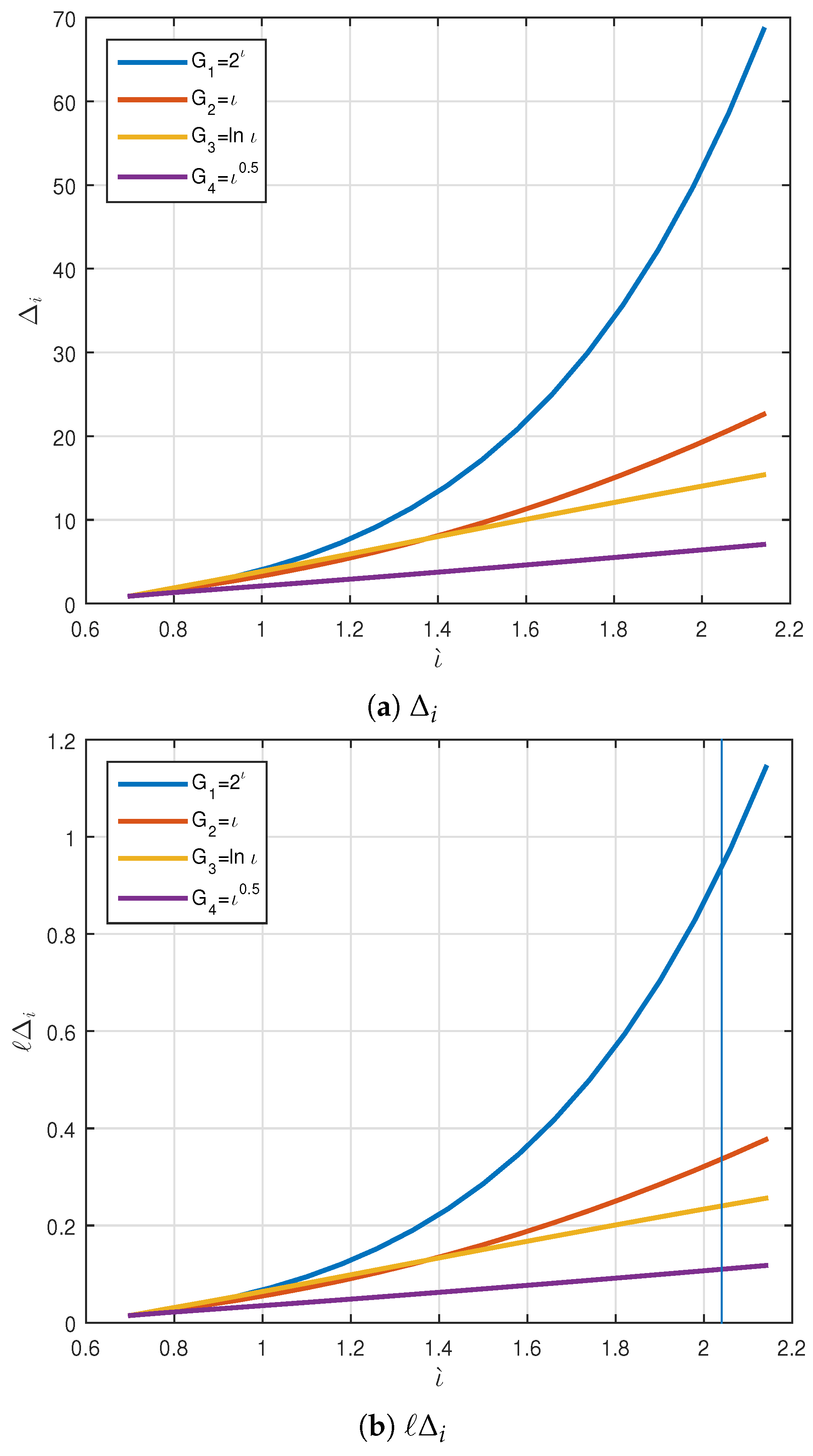
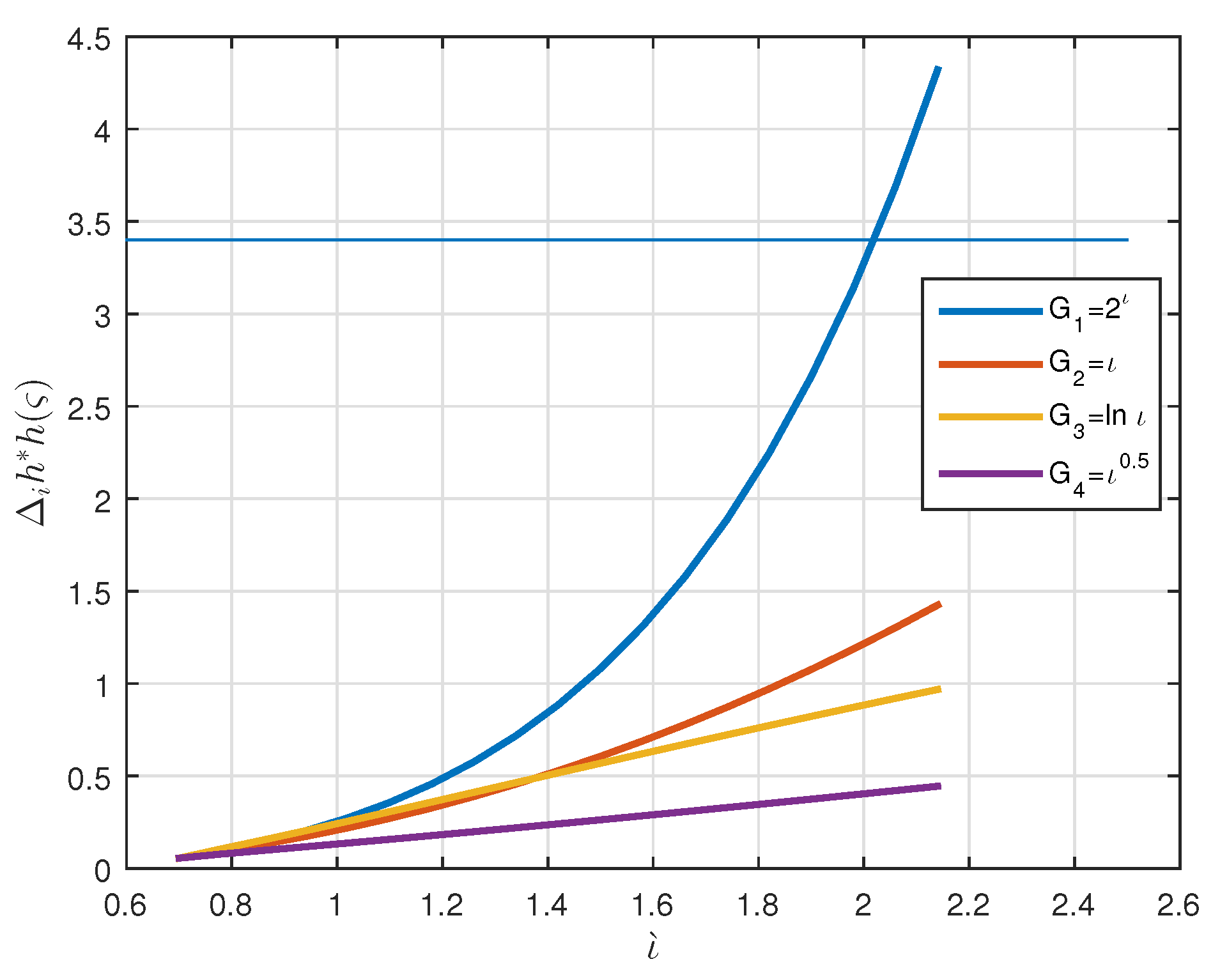
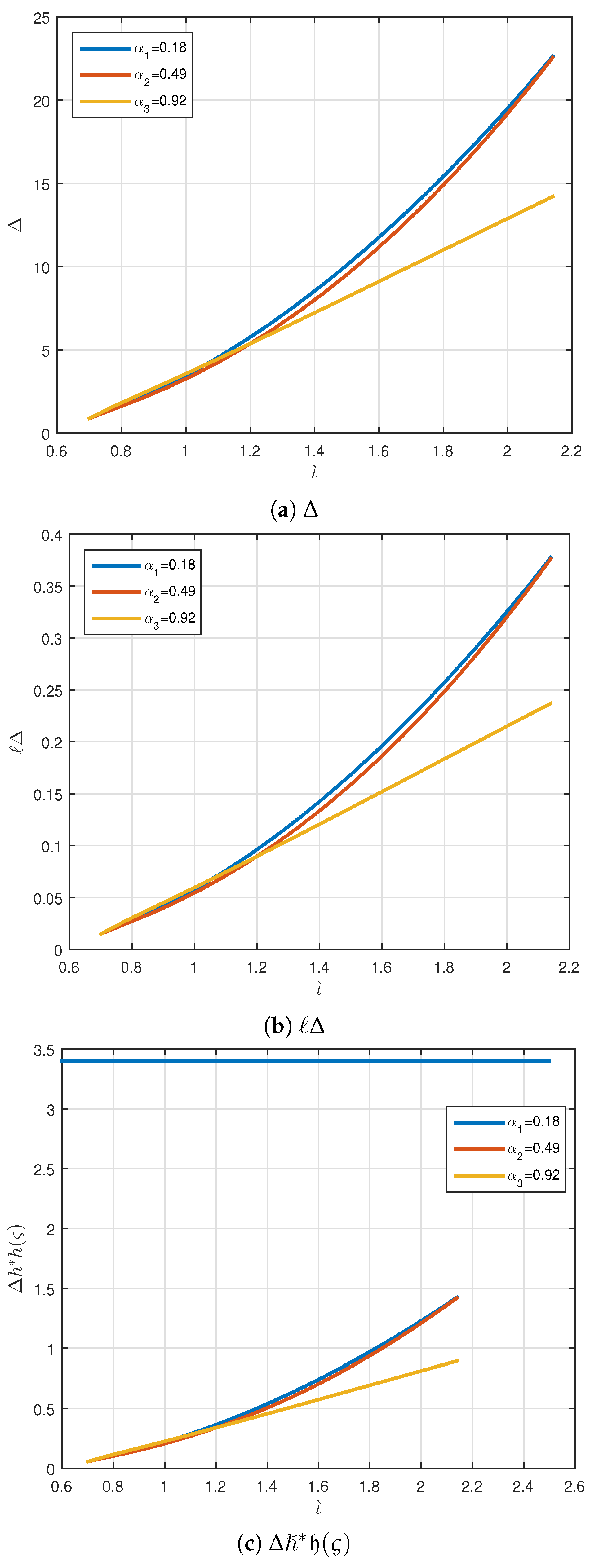
5. Numerical Applications
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gottlieb, H.P.W. Harmonic balance approach to periodic solutions of nonlinear jerk equations. J. Sound Vib. 2004, 271, 671–683. [Google Scholar] [CrossRef]
- Elsonbaty, A.R.; El-Sayed, A.M. Further nonlinear dynamical analysis of simple jerk system with multiple attractors. Nonlinear Dynam. 2017, 87, 1169–1186. [Google Scholar] [CrossRef]
- Rahman, M.S.; Hasan, A.S.M.Z. Modified harmonic balance method for the solution of nonlinear jerk equations. Results Phys. 2018, 8, 893–897. [Google Scholar] [CrossRef]
- Prakash, P.; Singh, J.P.; Roy, B.K. Fractional-order memristor-based chaotic jerk system with no equilibrium point and its fractional-order backstepping control. IFAC-Papers Online 2018, 51, 1–6. [Google Scholar] [CrossRef]
- Rezapour, S.; Thabet, S.T.M.; Matar, M.M.; Alzabut, J.; Etemad, S. Some Existence and Stability Criteria to a Generalized FBVP Having Fractional Composite p-Laplacian Operator. J. Funct. Spaces 2021, 2021, 9554076. [Google Scholar] [CrossRef]
- Matar, M.M.; Ahmad, M.; Zada, A.; Etemad, S.; Rezapour, S. On the existence and stability of two positive solutions of a hybrid differential system of arbitrary fractional order via Avery–Anderson–Henderson criterion on cones. Adv. Differ. Equ. 2021, 2021, 423. [Google Scholar] [CrossRef]
- Ragusa, M.A. Quasilinear equations with discontinuous coefficients. Commun. Appl. Anal. 2005, 9, 337–341. [Google Scholar]
- Sanaullah, K.; Ullah, S.; Arif, M.F.; Abodayeh, K.; Fayyaz, R. Self-adaptive predictorcorrector approach for general variational inequalities using a fixed-point formulation. J. Funct. Spaces 2022, 2022, 2478644. [Google Scholar] [CrossRef]
- Mohammadi, H.; Baleanu, D.; Etemad, S.; Rezapour, S. Criteria for existence of solutions for a Liouville–Caputo boundary value problem via generalized Gronwall’s inequality. J. Inequalities Appl. Vol. 2021, 2021, 36. [Google Scholar] [CrossRef]
- Yin, T.C. Algorithmic and analytical approach to the proximal split feasibility problem and fixed point problem. Filomat 2022, 36, 439–448. [Google Scholar] [CrossRef]
- Hajiseyedazizi, S.N.; Samei, M.E.; Alzabut, J.; Chu, Y. On multi-step methods for singular fractional q–integro-differential equations. Open Math. 2021, 19, 1378–1405. [Google Scholar] [CrossRef]
- Vanterler da, C. Sousa, J.; Capelas de Oliveira, E. On the Ulam-Hyers-Rassias stability for nonlinear fractional differential equations using the ψ-Hilfer operator. J. Fixed Point Theory Appl. 2018, 20, 96. [Google Scholar] [CrossRef]
- Matar, M.M.; Abbas, M.I.; Alzabut, J.; Kaabar, M.K.A.; Etemad, S.; Rezapour, S. Investigation of the p-Laplacian nonperiodic nonlinear boundary value problem via generalized Caputo fractional derivatives. Adv. Differ. Equ. 2021, 2021, 68. [Google Scholar] [CrossRef]
- Liu, C.; Chang, J.R. The periods and periodic solutions of nonlinear jerk equations solved by an iterative algorithm based on a shape function method. Appl. Math. Lett. 2020, 102, 106151. [Google Scholar] [CrossRef]
- Samei, M.E.; Matar, M.M.; Etemad, S.; Rezapour, S. On the generalized fractional snap boundary problems via G-Caputo operators: Existence and stability analysis. Adv. Differ. Equ. 2021, 2021, 498. [Google Scholar] [CrossRef]
- Abbas, M.I.; Ghaderi, M.; Rezapour, S.; Thabet, S.T.M. On a Coupled System of Fractional Differential Equations via the Generalized Proportional Fractional Derivatives. J. Funct. Spaces 2022, 2022, 4779213. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science: North-Holland Mathematics Studies; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach Science Publishers: Basel, Switzerland; Philadelphia, PA, USA, 1993. [Google Scholar]
- Almeida, R. A Caputo fractional derivative of a function with respect to another function. Commun. Nonlinear Sci. Numer. Simul. 2017, 44, 460–481. [Google Scholar] [CrossRef]
- Almeida, R.; Malinowska, A.B.; Teresa, M.; Monteiro, T. Fractional differential equations with a Caputo derivative with respect to a kernel function and their applications. Math. Methods Appl. Sci. 2018, 41, 336–352. [Google Scholar] [CrossRef]
- Hyers, D. On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 1941, 27, 222–224. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Berhail, A.; Tabouche, N.; Matar, M.M.; Samei, M.E.; Kaabar, M.K.A.; Yue, X.-G.
A Novel Investigation of Non-Periodic Snap BVP in the
Wang X, Berhail A, Tabouche N, Matar MM, Samei ME, Kaabar MKA, Yue X-G.
A Novel Investigation of Non-Periodic Snap BVP in the
Wang, Xiaofeng, Amel Berhail, Nora Tabouche, Mohammed M. Matar, Mohammad Esmael Samei, Mohammed K. A. Kaabar, and Xiao-Guang Yue.
2022. "A Novel Investigation of Non-Periodic Snap BVP in the
Wang, X., Berhail, A., Tabouche, N., Matar, M. M., Samei, M. E., Kaabar, M. K. A., & Yue, X. -G.
(2022). A Novel Investigation of Non-Periodic Snap BVP in the