
Analysis of Finite Solution Spaces of Second-Order ODE with Dirac Delta Periodic Forcing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Motivations
1.2. Contributions
2. Analysis of ODE with Periodic DD Forcing
Convergence Analysis
3. Numerical Analysis
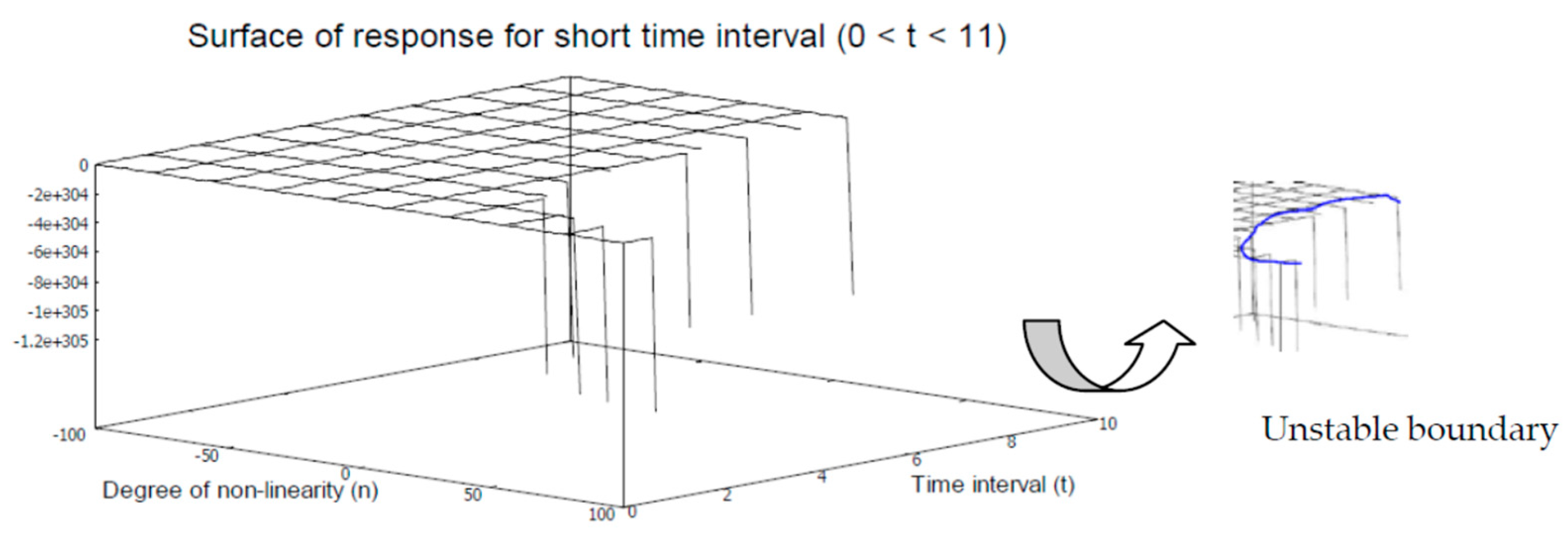
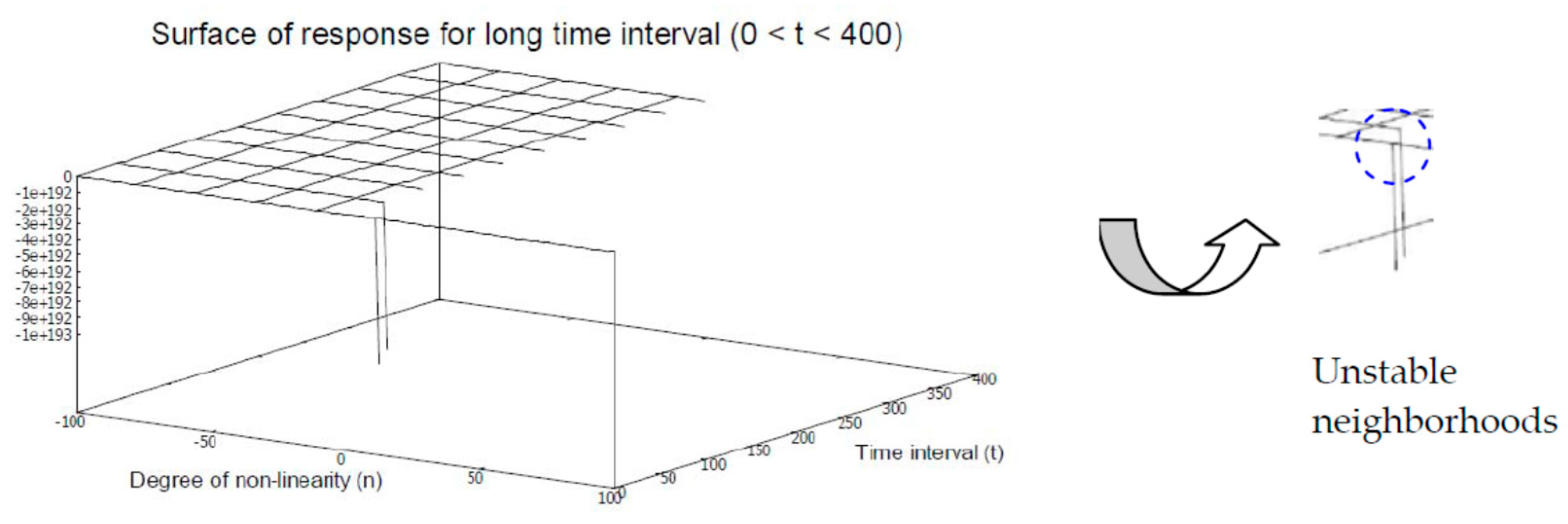
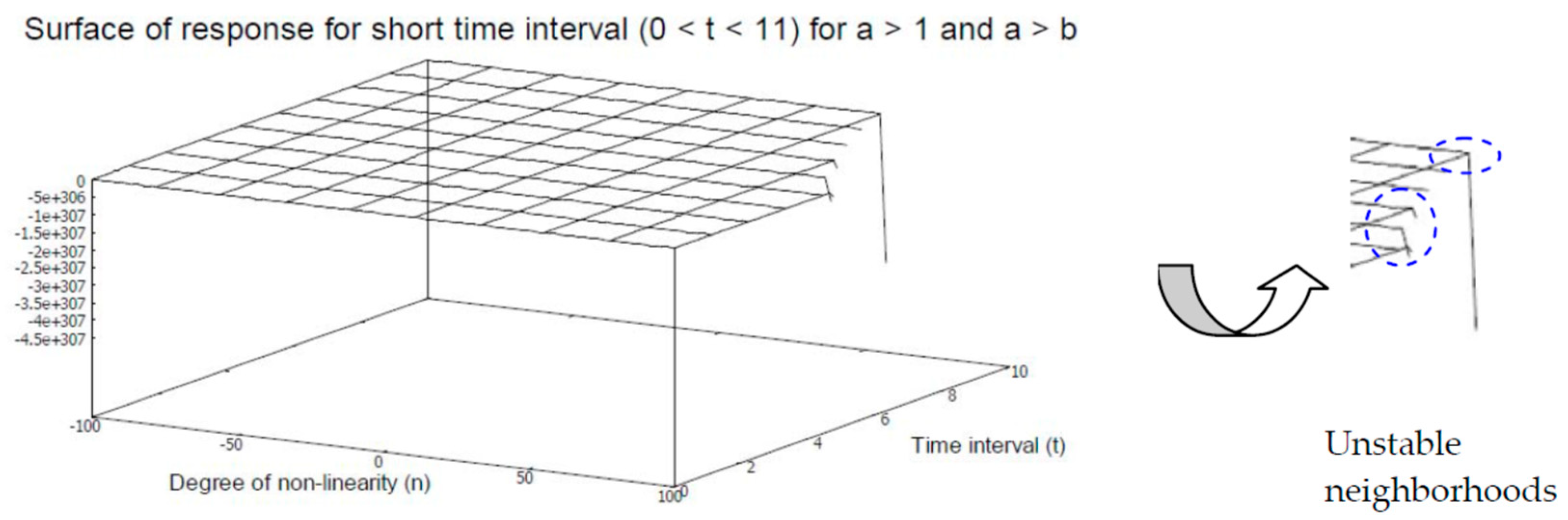
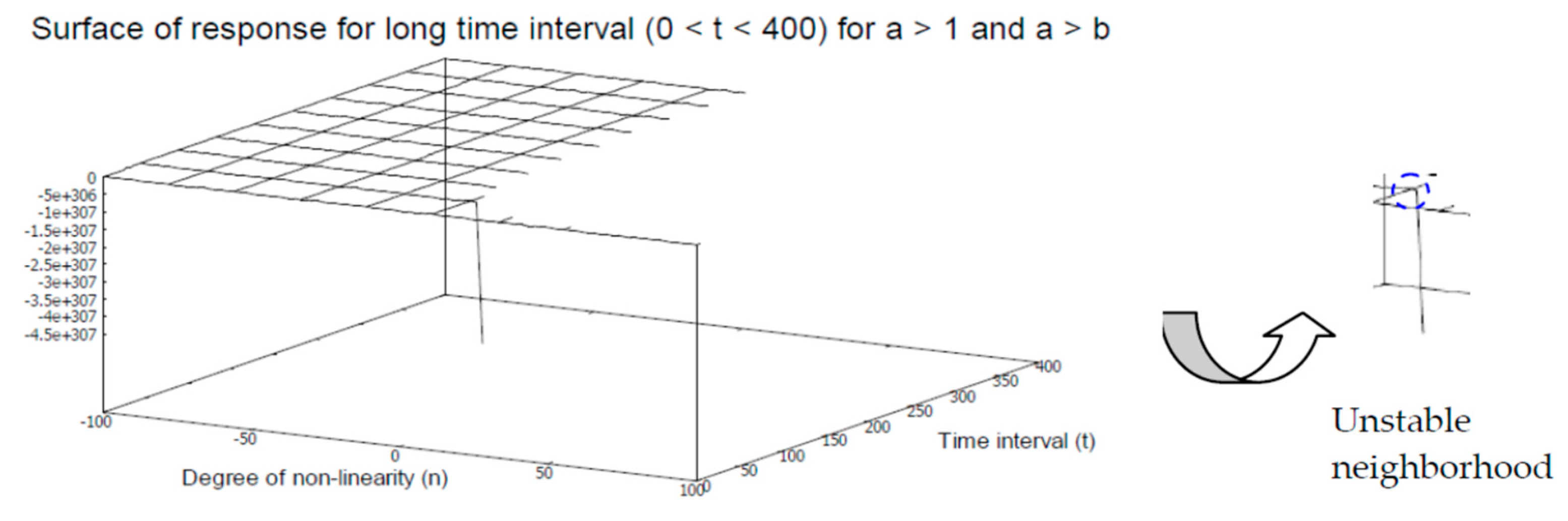
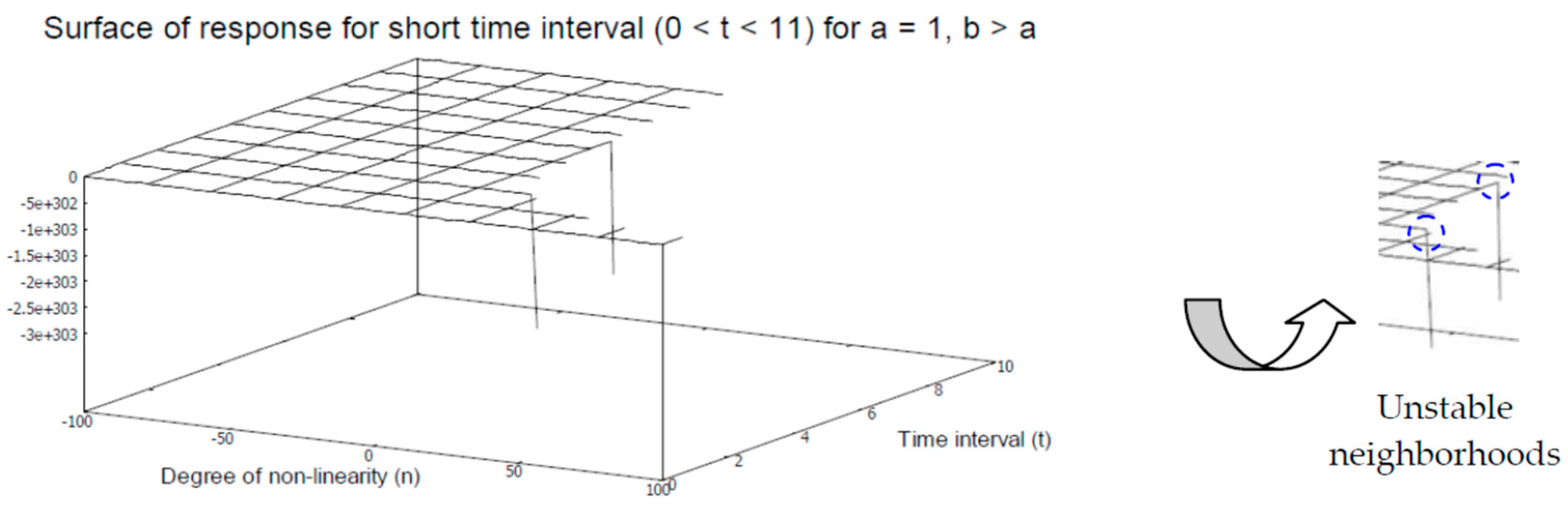
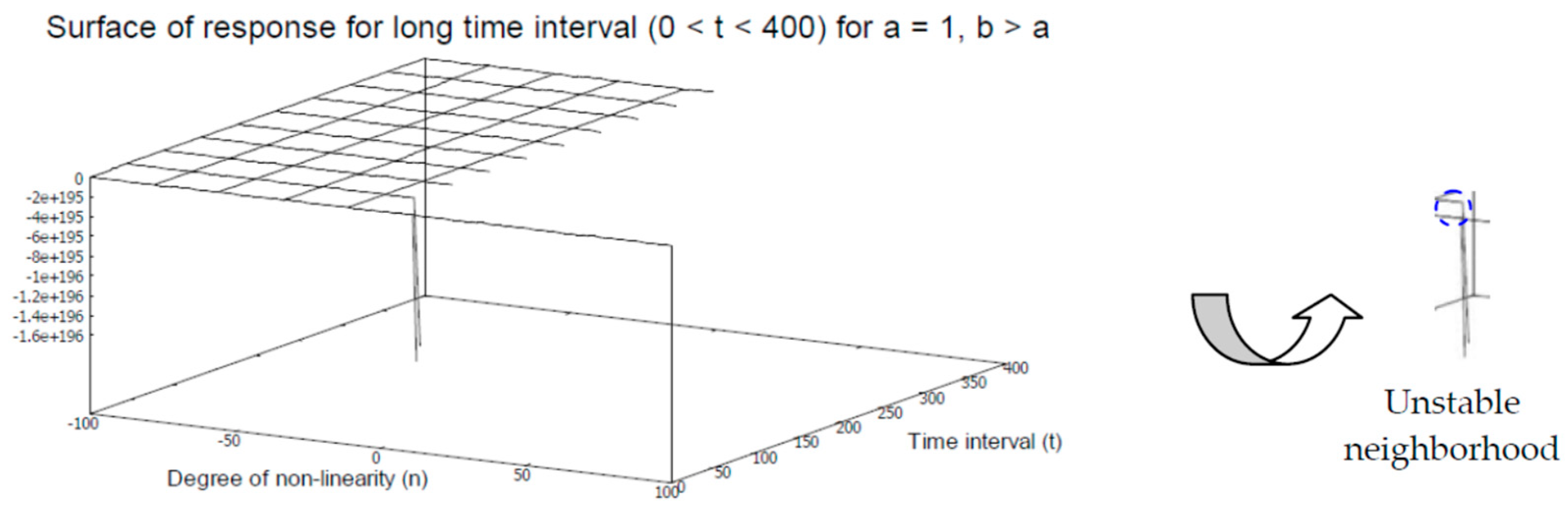
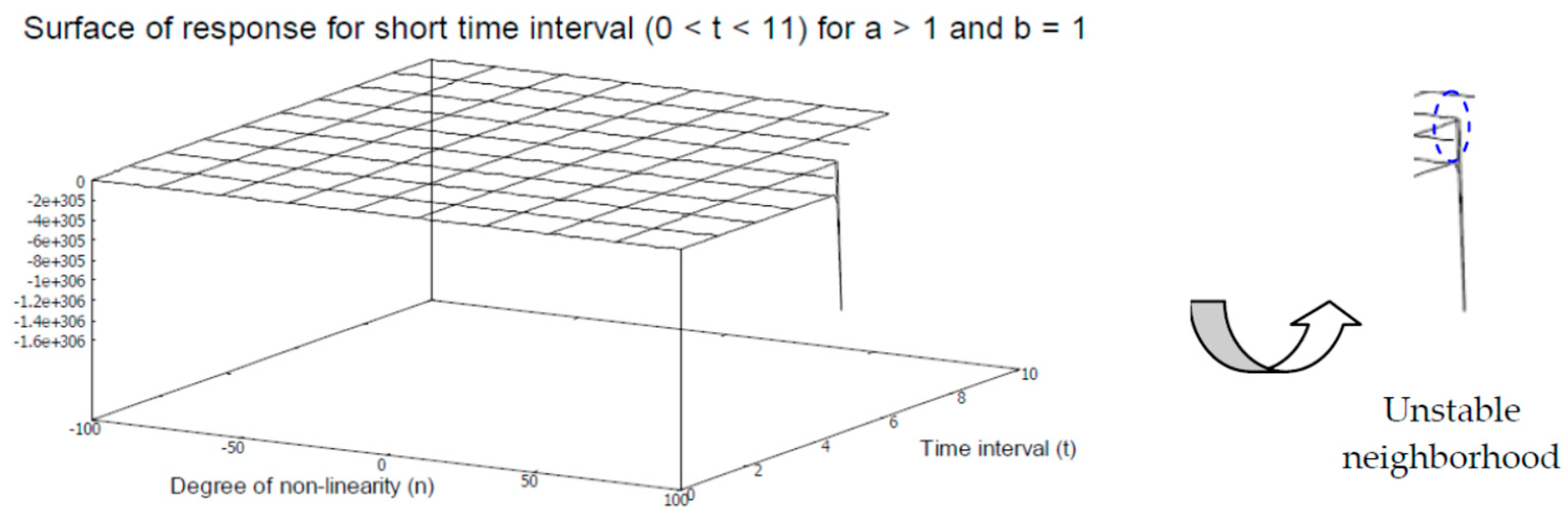
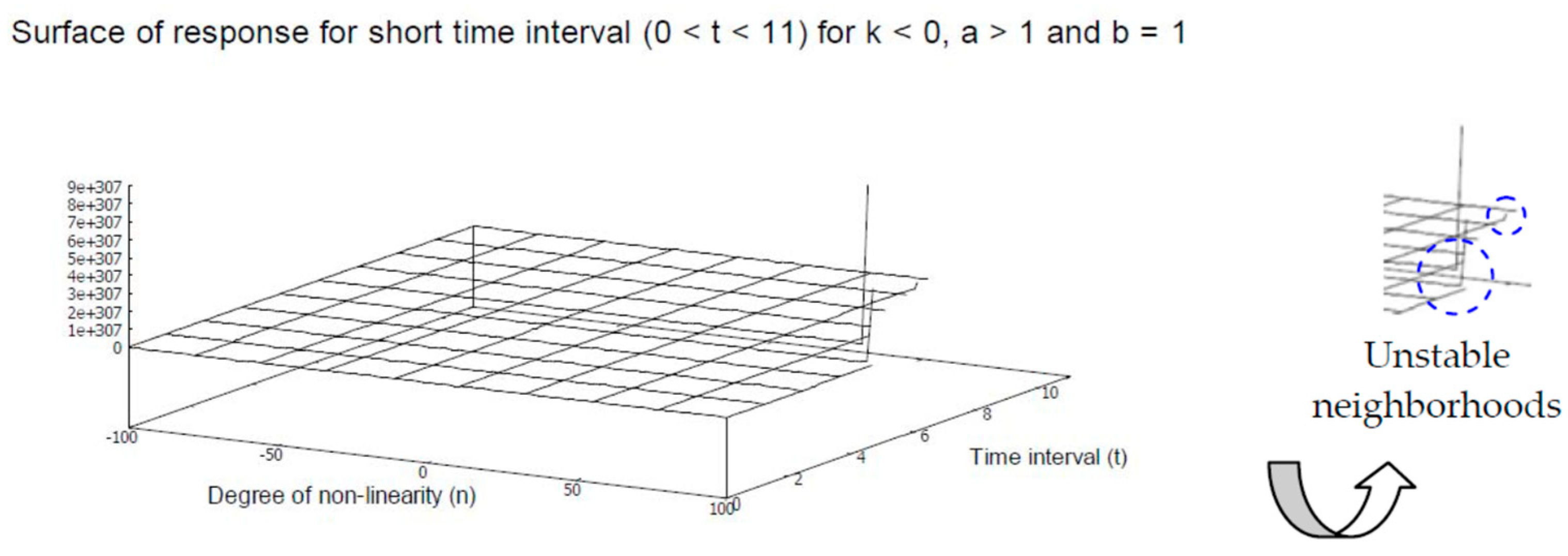
3.1. Response Profiles for and
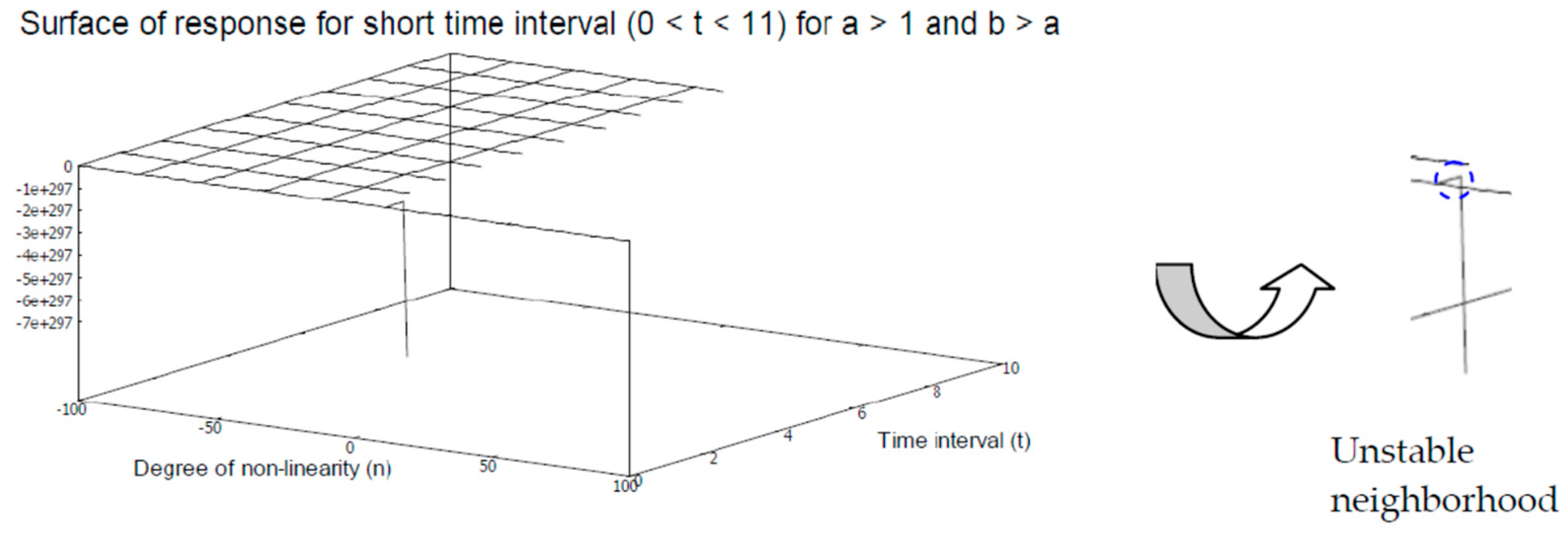
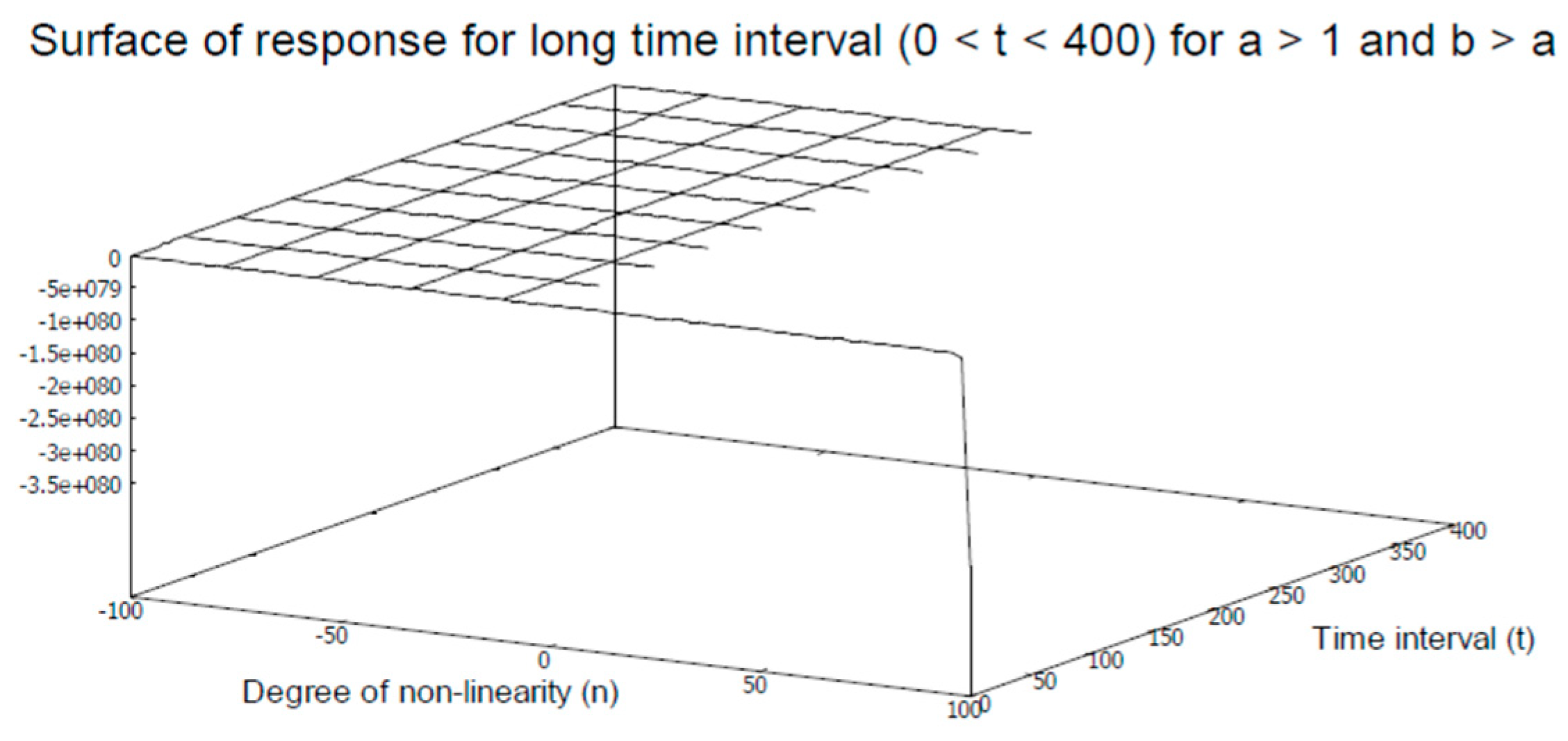
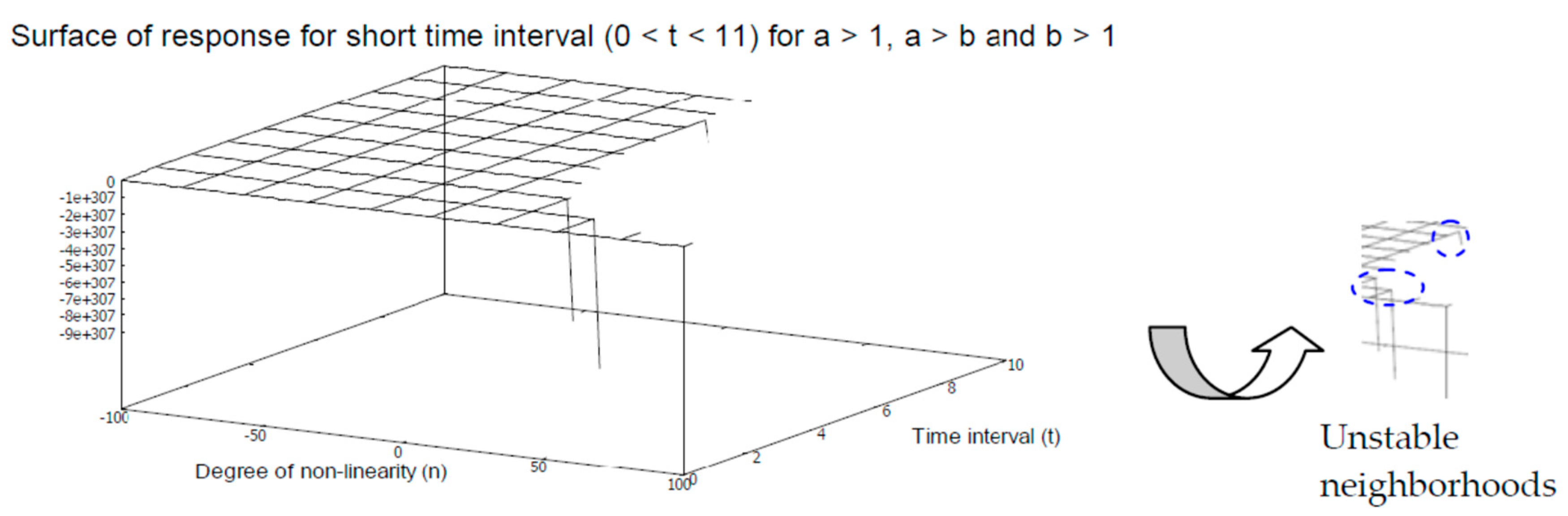
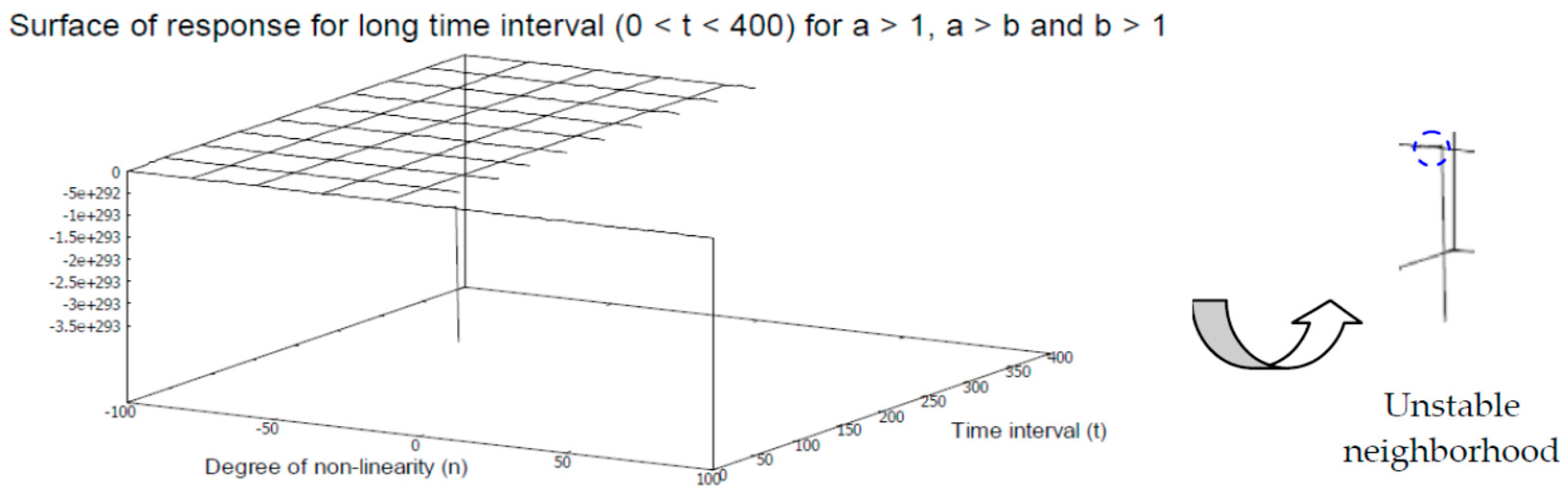
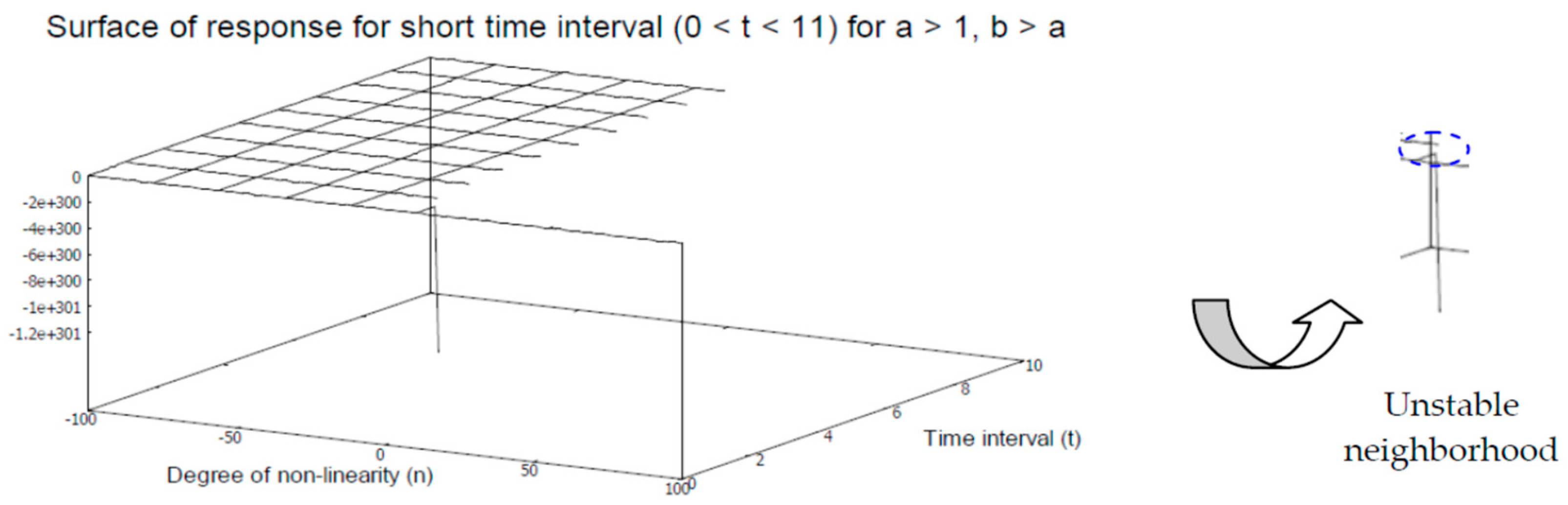
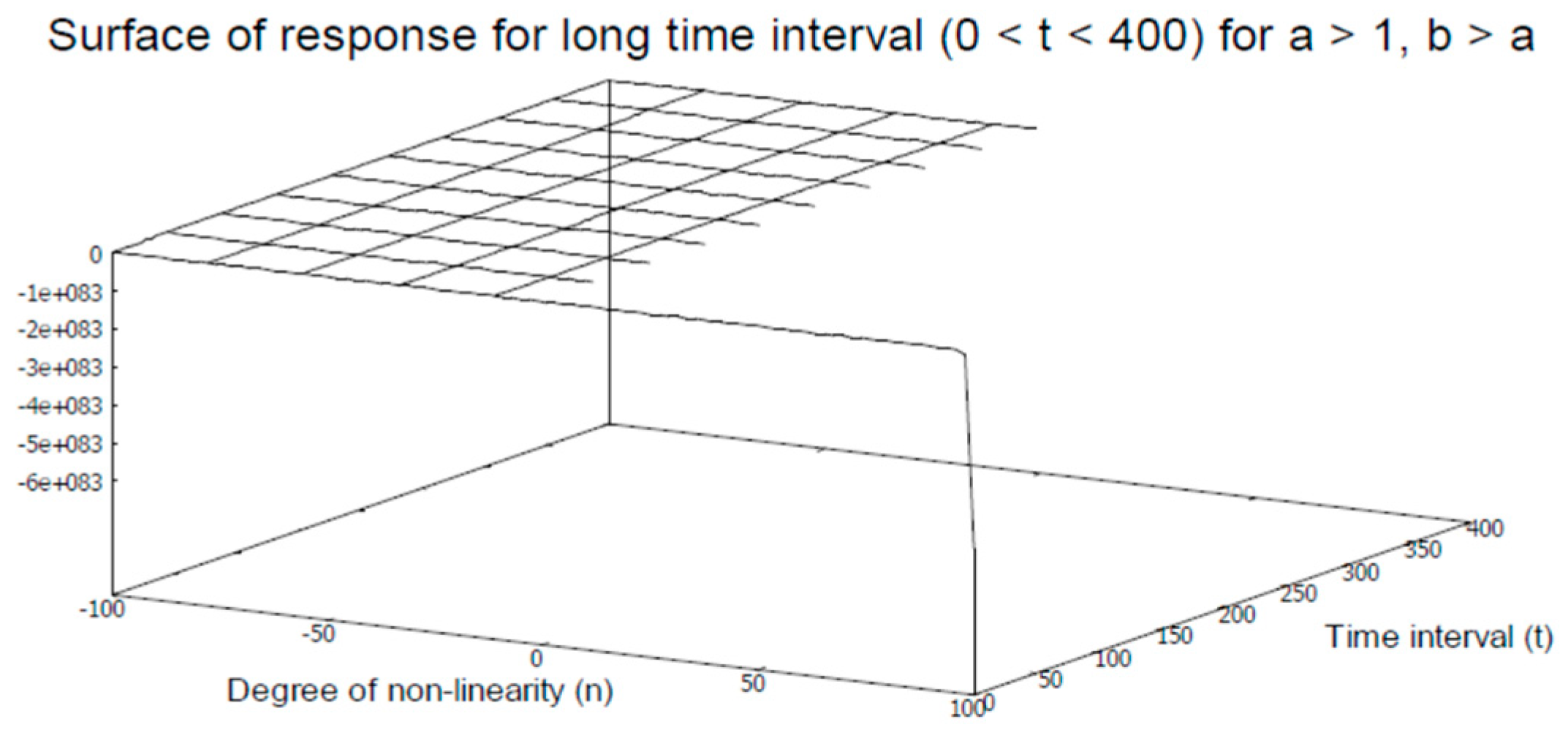
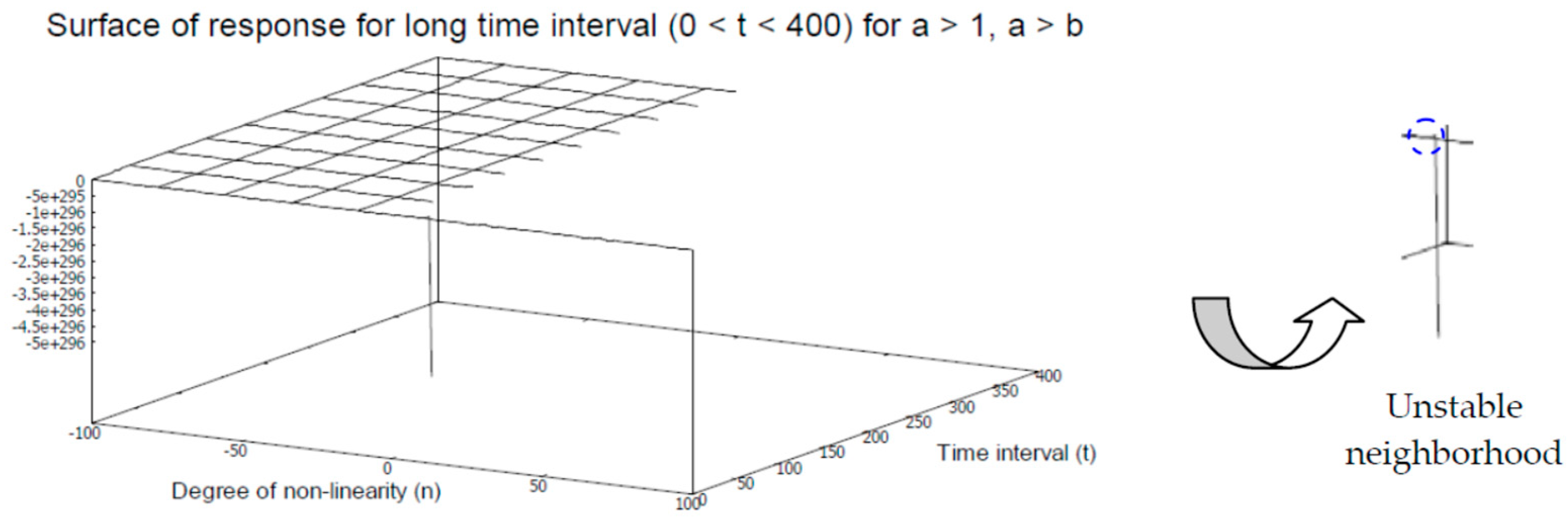
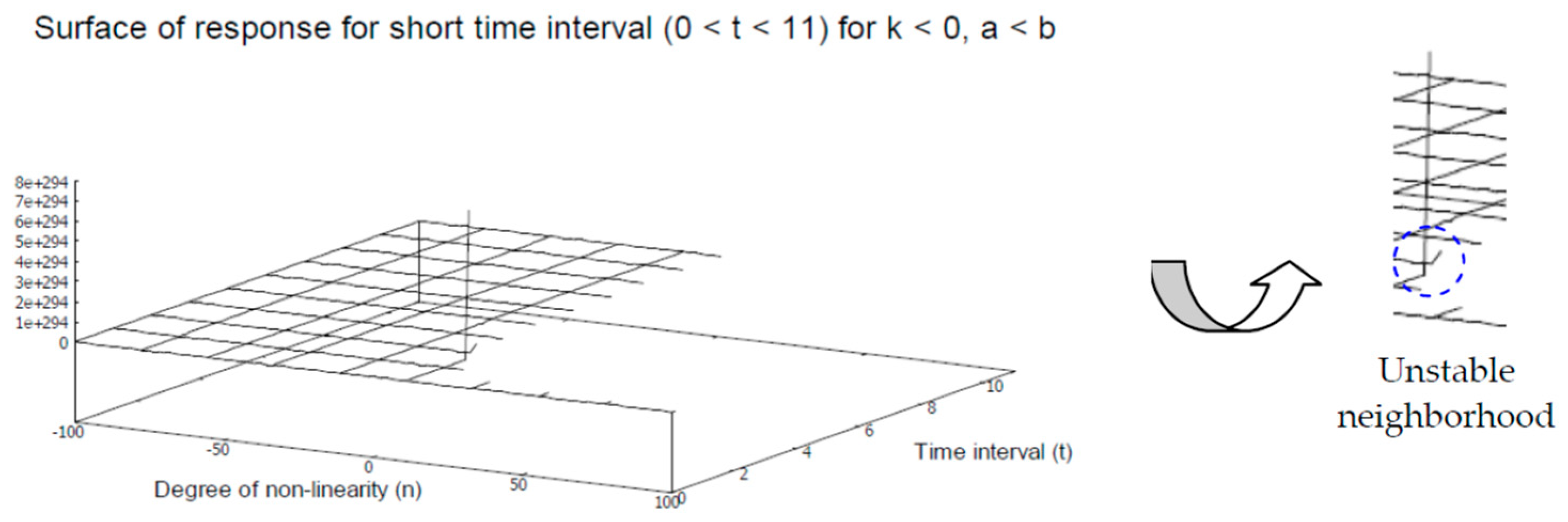
3.2. Response Profiles for and
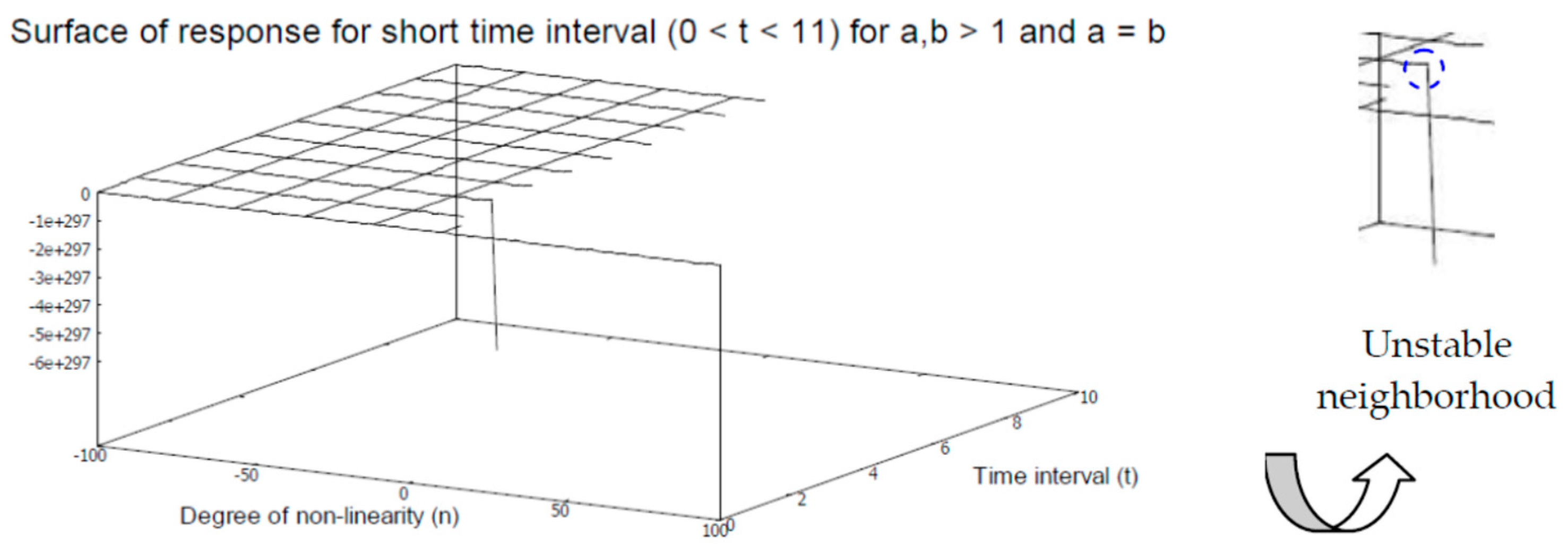
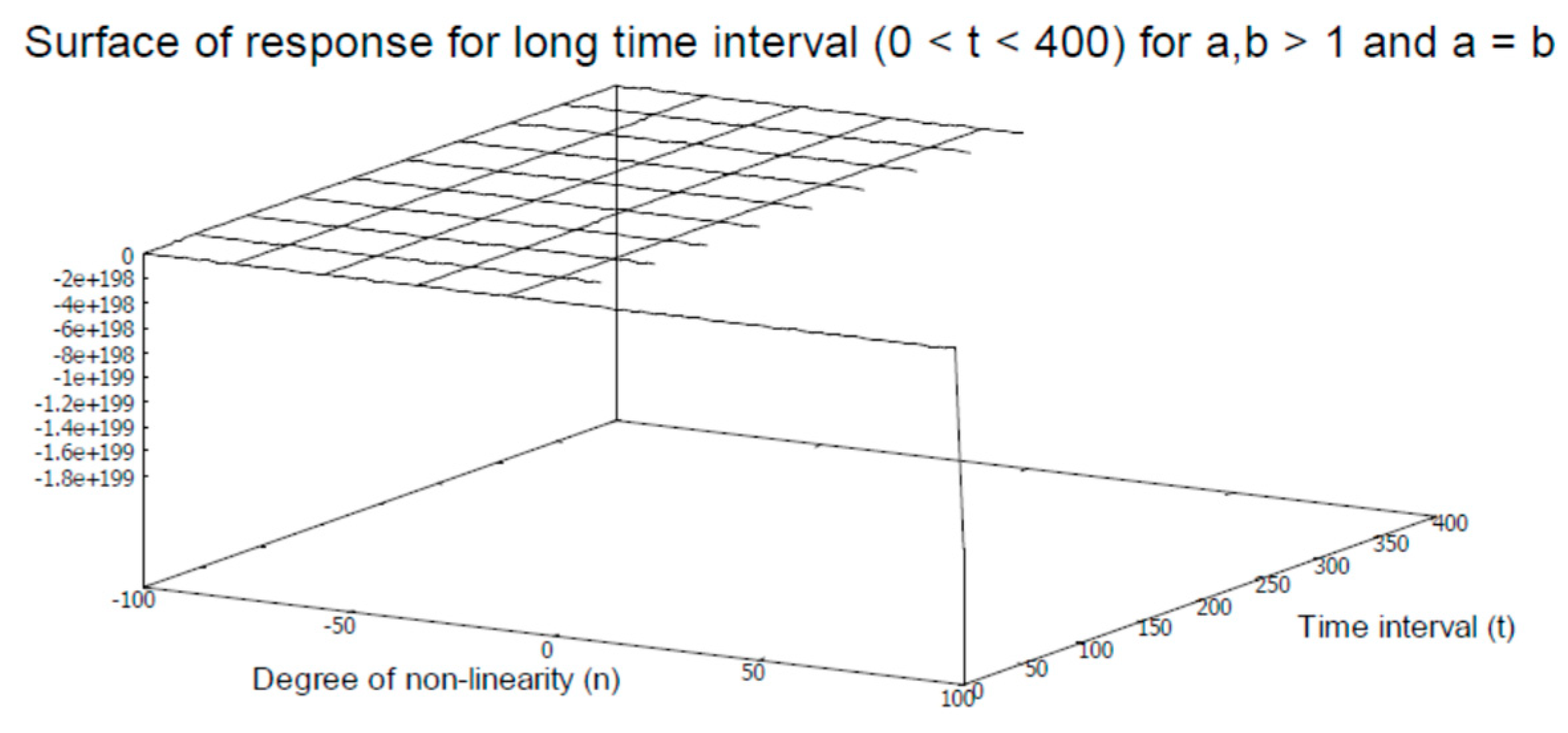
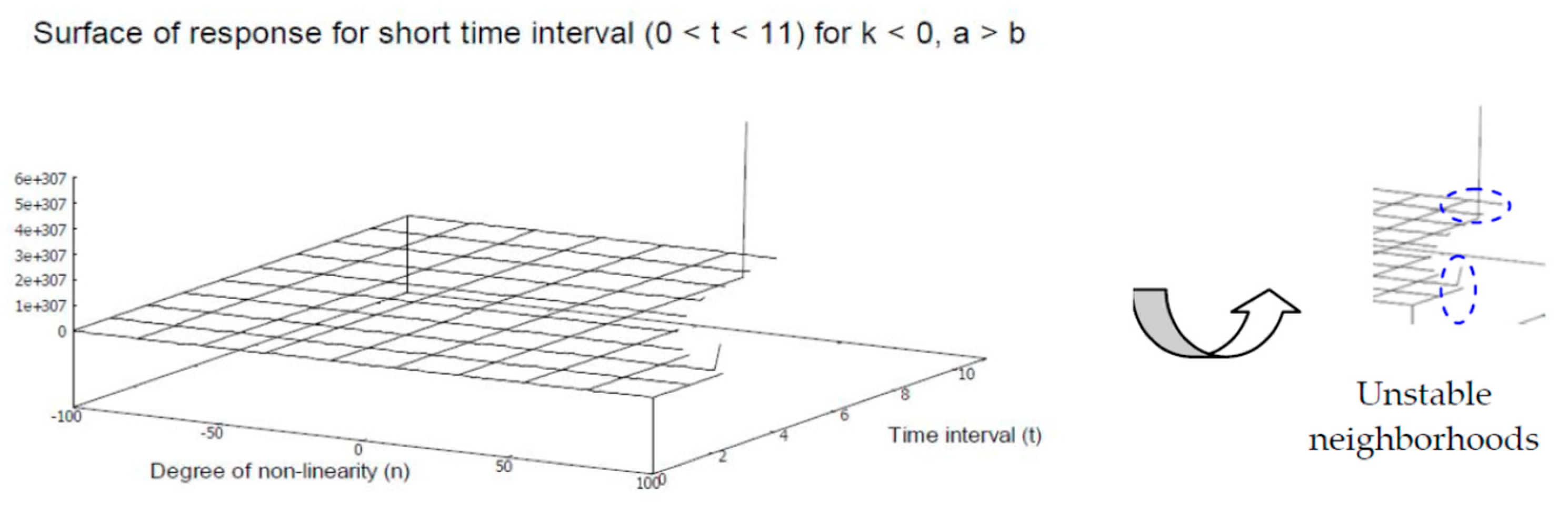
3.3. Response Profiles for and
3.4. Local Response Profiles for
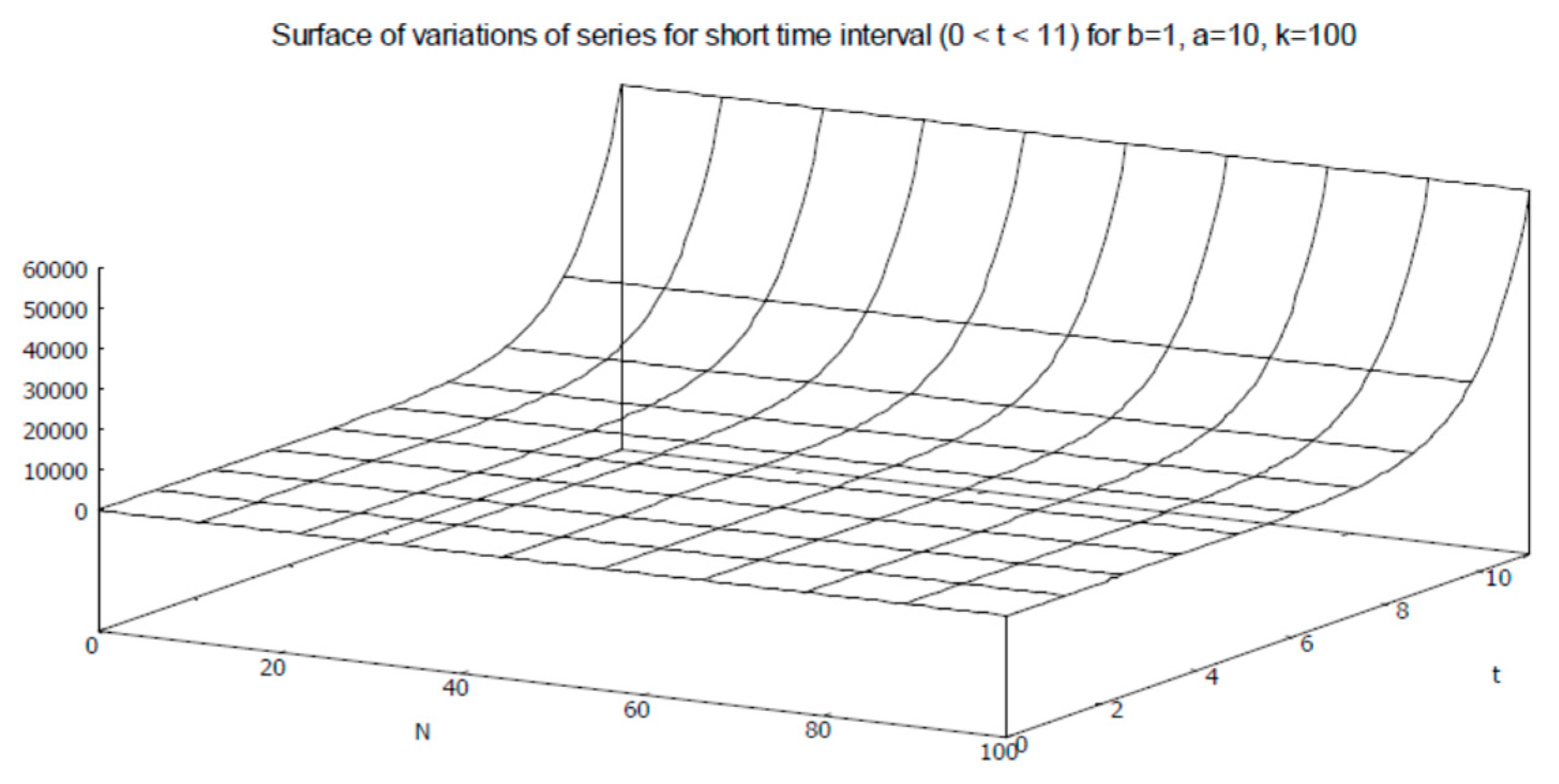
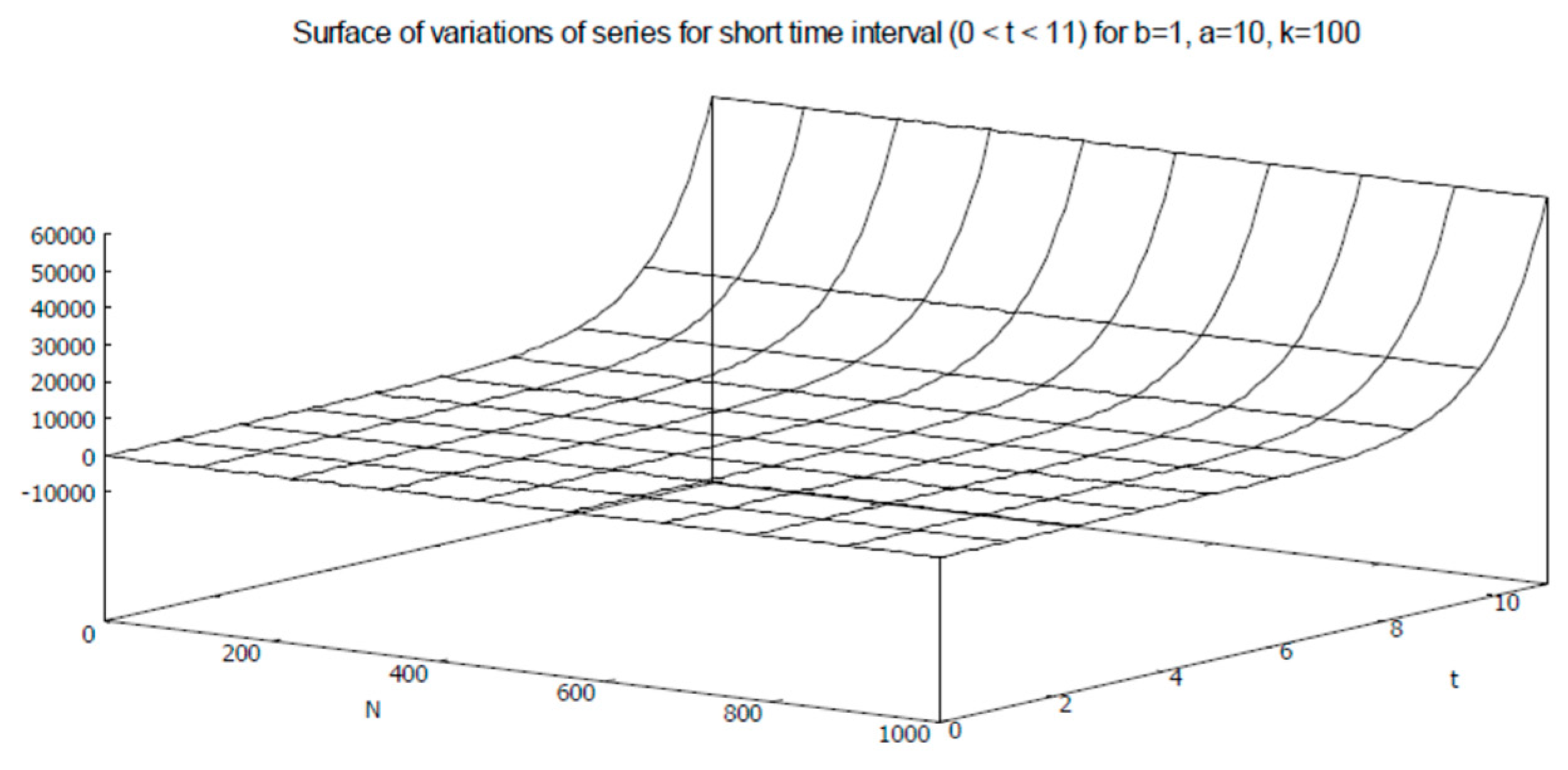
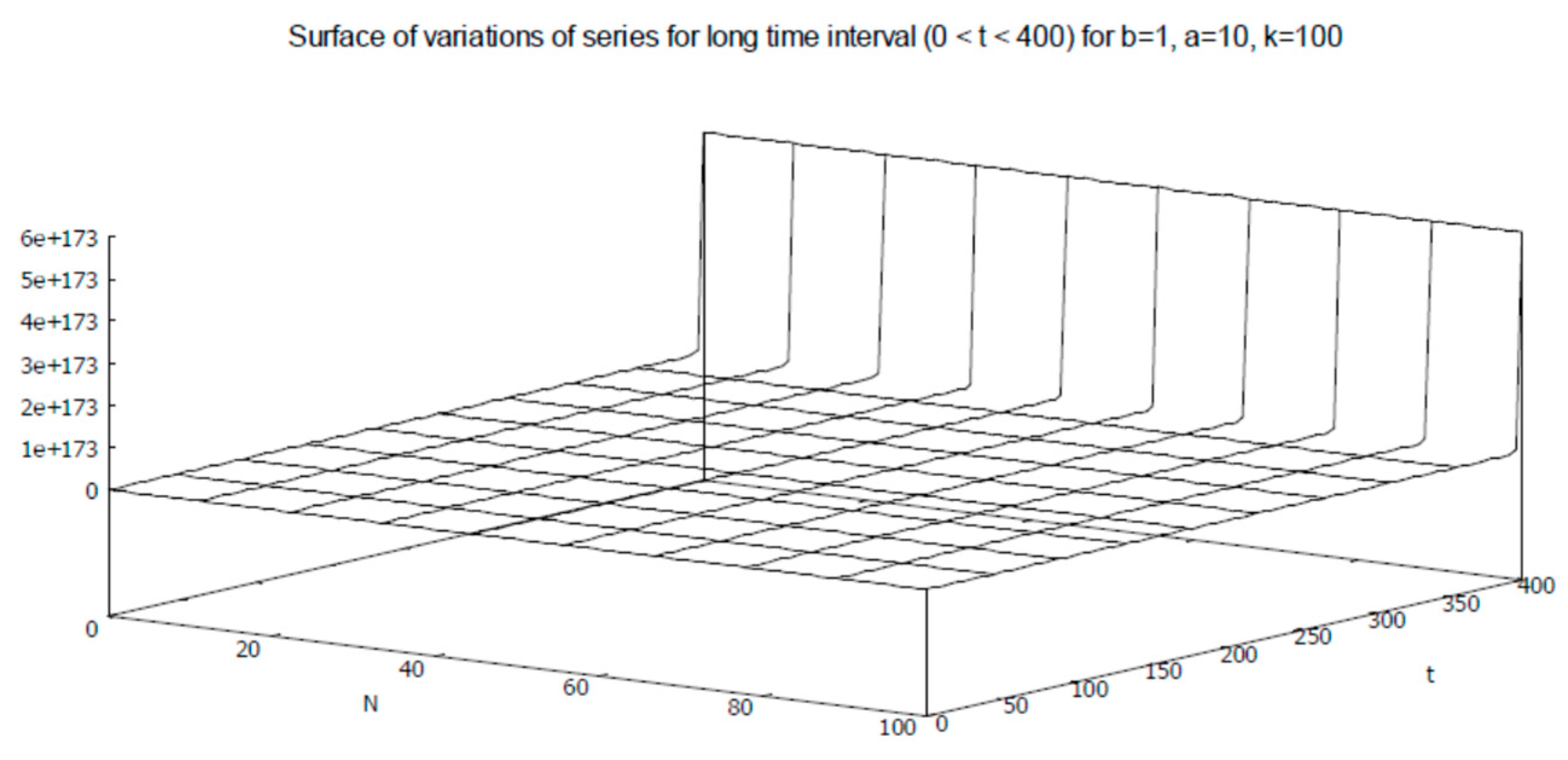
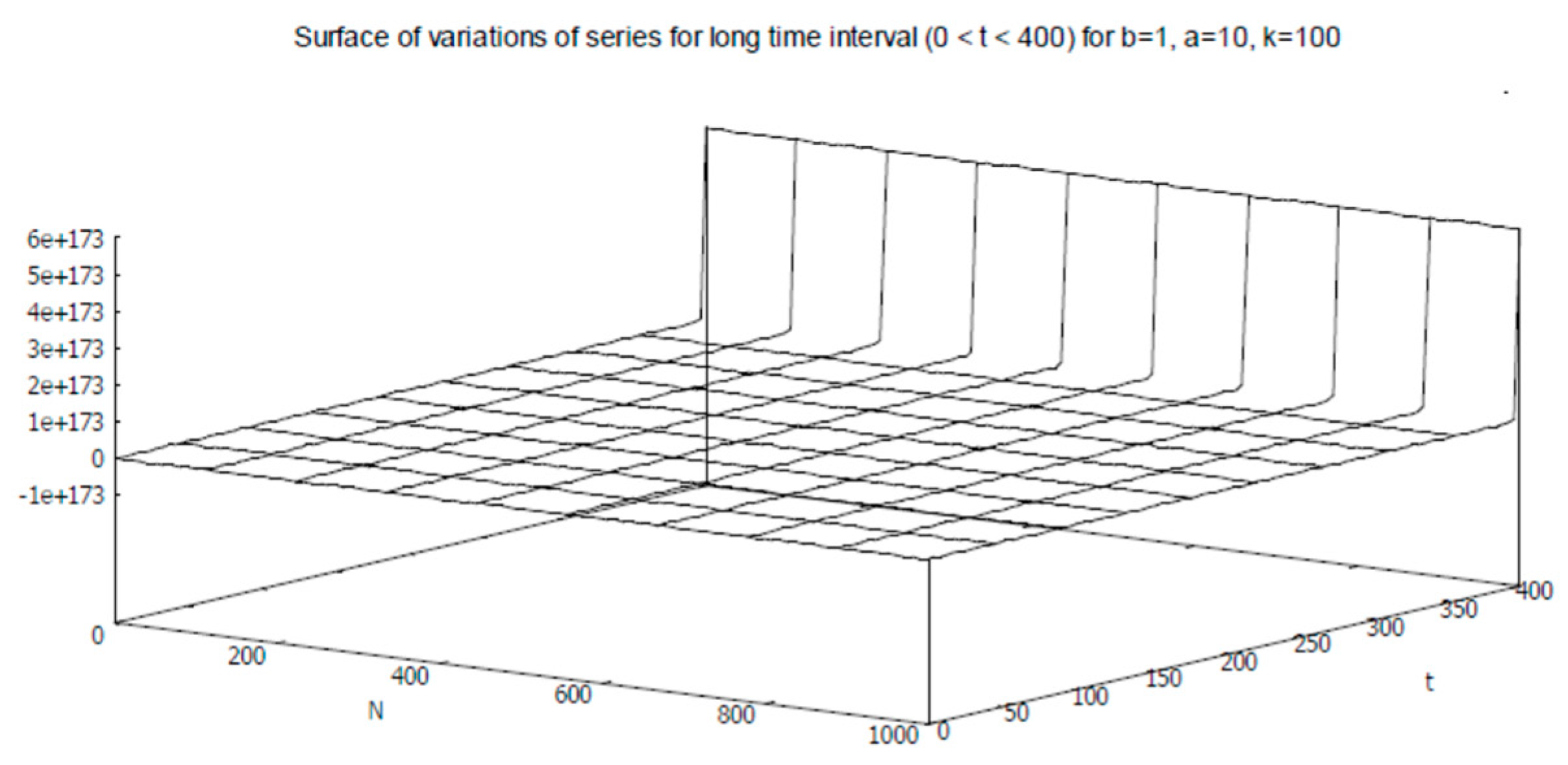
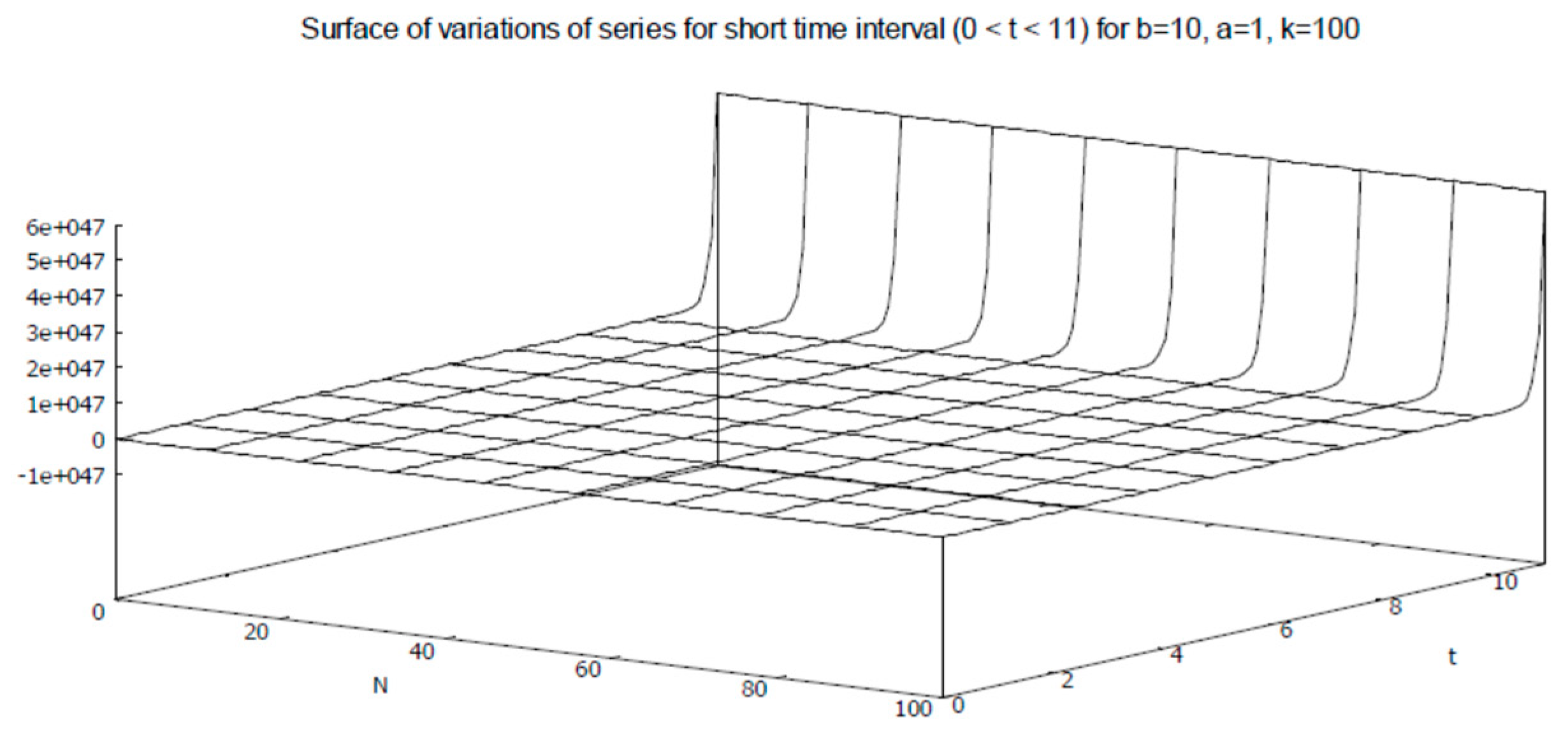
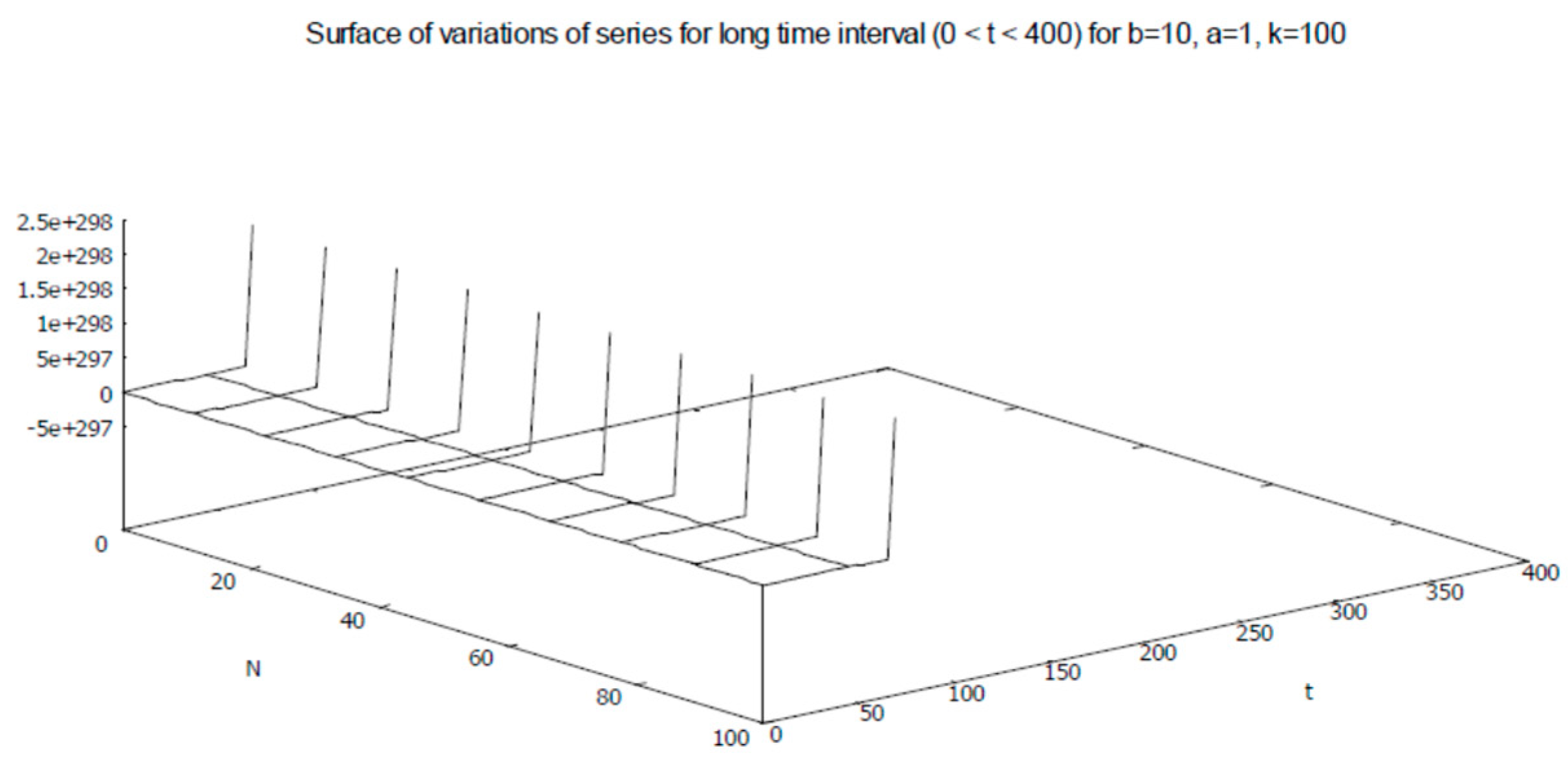
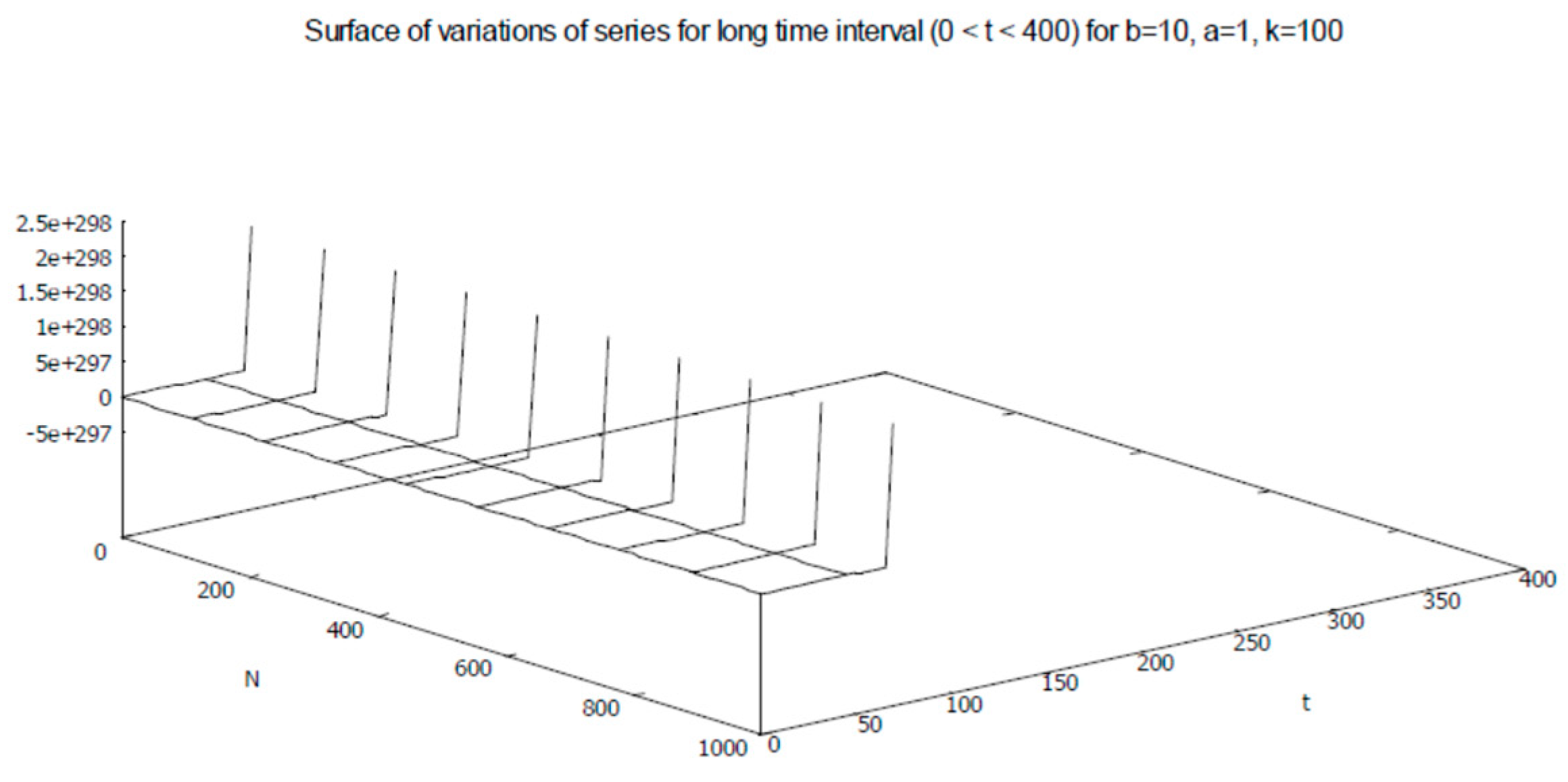
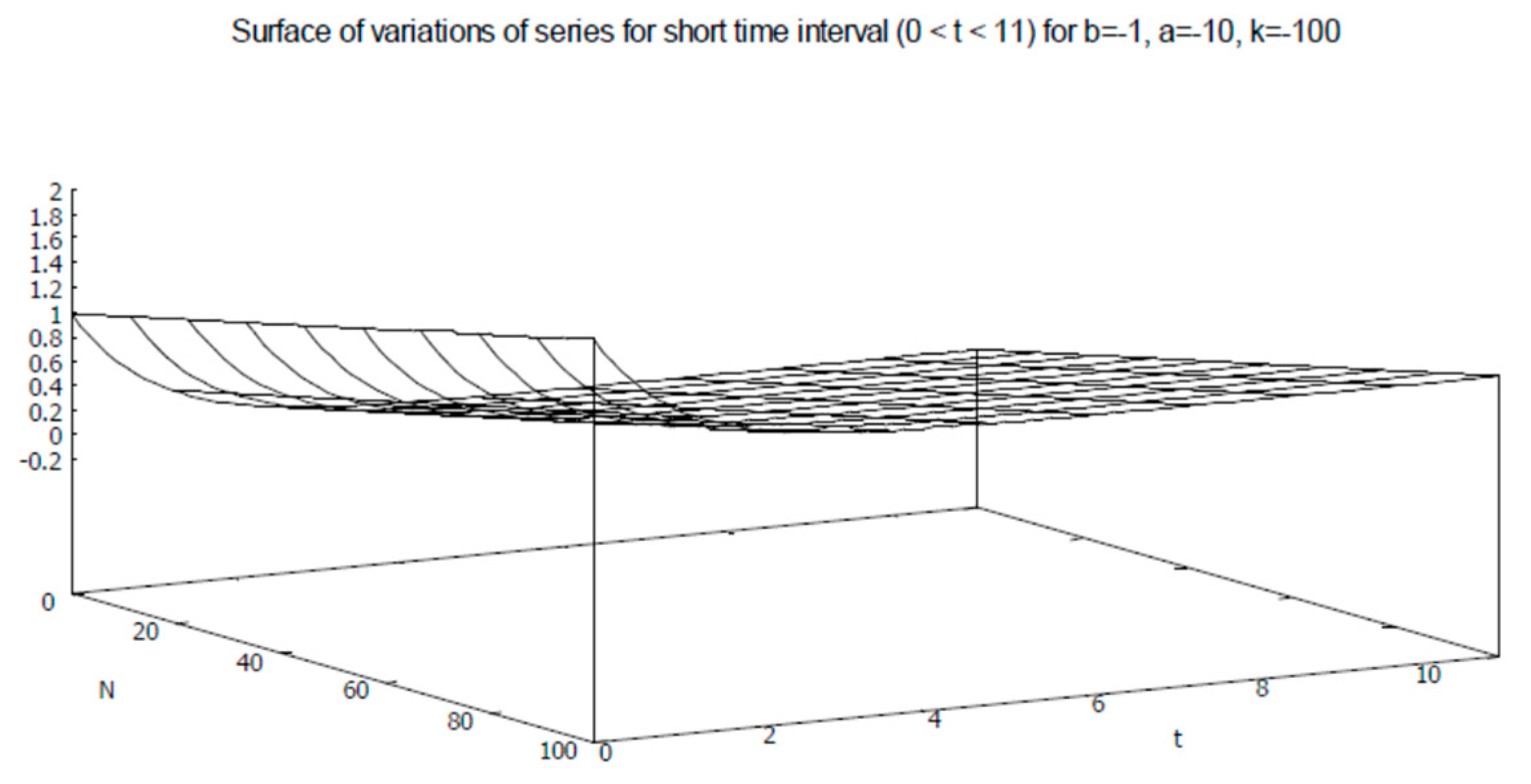
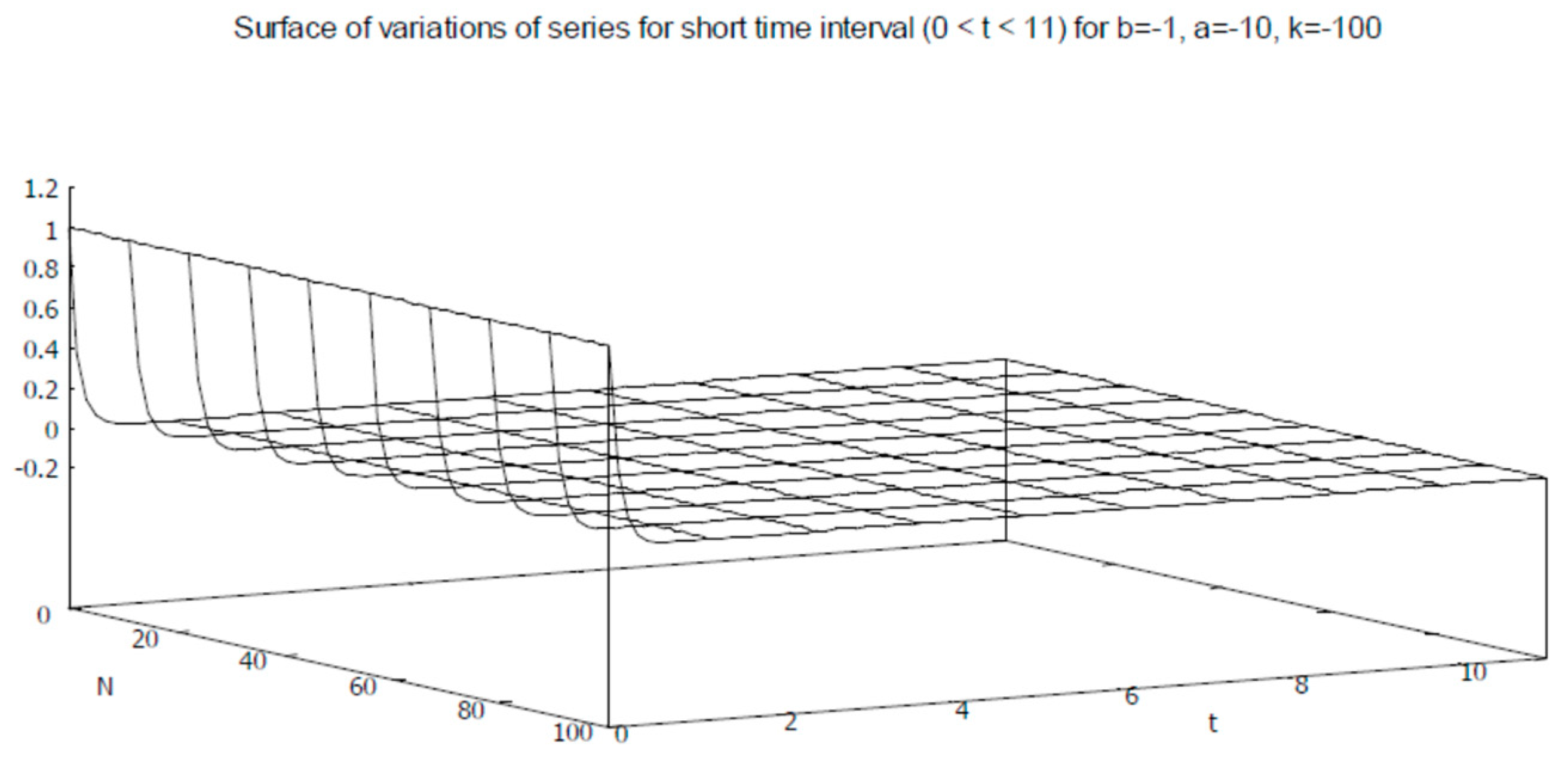
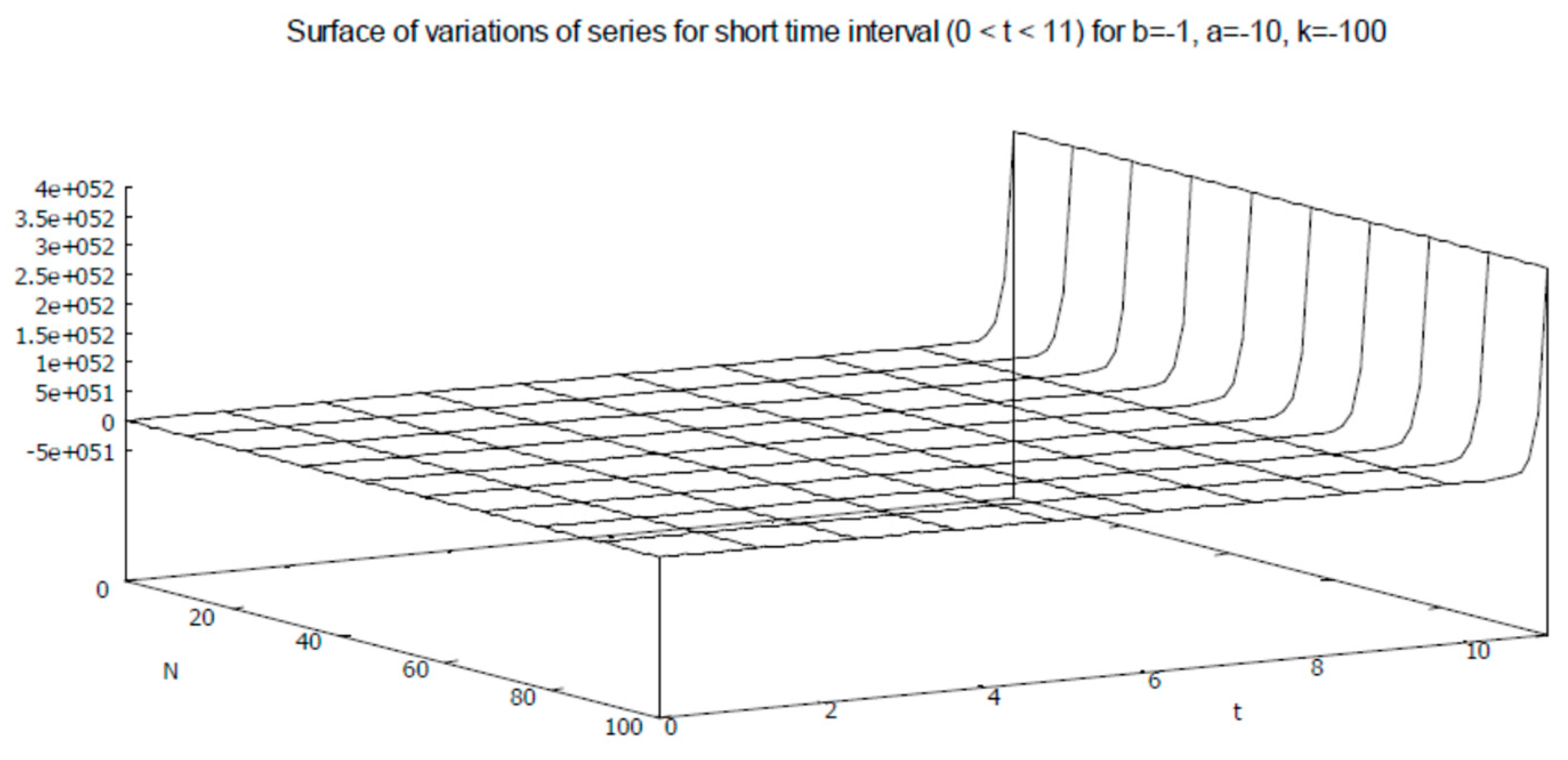
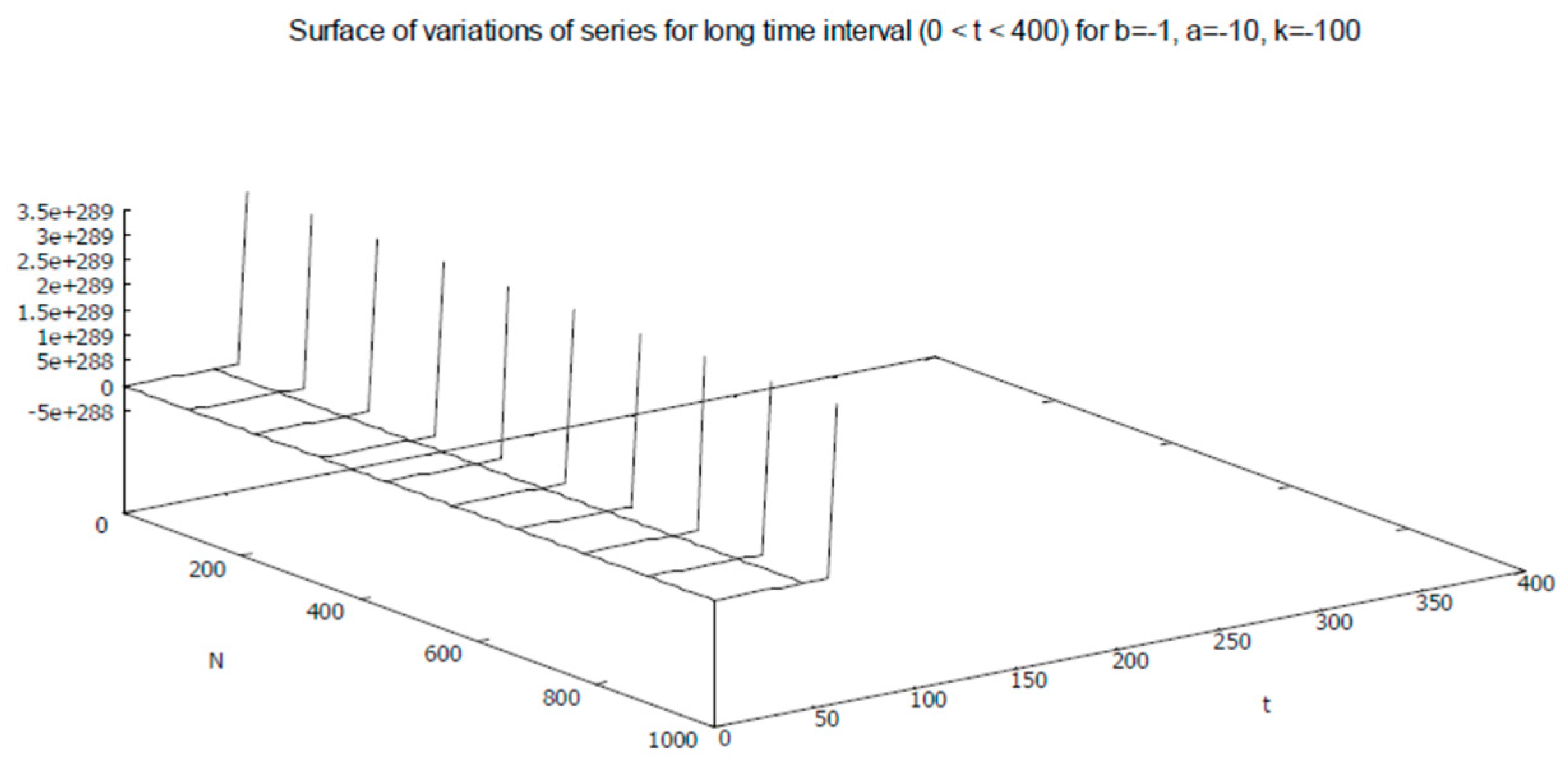
3.5. Evaluations of Variations of Sum of Series
4. Applicational Prospects
5. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Precup, R.; Rodríguez-López, J. Positive solutions for ϕ-Laplace equations with discontinuous state-dependent forcing terms. Nonlinear Anal. Model. Control 2019, 24, 447–461. [Google Scholar] [CrossRef]
- Brauer, F. Nonlinear Differential Equations with Forcing Terms. Proc. Am. Math. Soc. 1964, 15, 758–765. [Google Scholar] [CrossRef]
- Walsh, J.; Widiasih, E. A discontinuous ODE model of the glacial cycles with diffusive heat transport. Mathematics 2020, 8, 316. [Google Scholar] [CrossRef] [Green Version]
- Filippov, A.F. Differential Equations with Discontinuous Righthand Sides; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Hajek, O. Discontinuous differential equations. J. Diff. Eqn. 1979, 32, 149–170. [Google Scholar] [CrossRef] [Green Version]
- Eich-Soellner, E.; Führer, C. Integration of ODEs with Discontinuities. In Numerical Methods in Multibody Dynamics; Chapter 6; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 1998. [Google Scholar]
- Gear, C.W.; Osterby, O. Solving Ordinary Differential Equations with Discontinuities. ACM Trans. Math. Softw. 1984, 10, 23–44. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Browning, G. Discontinuous forcing generating rough initial conditions in 4DVAR data assimilation. J. Atmos. Sci. 2000, 57, 1646–1656. [Google Scholar] [CrossRef]
- Moreau, J.J.; Panagiotopoulos, P.D.; Strang, G. (Eds.) Topics in Nonsmooth Mechanics; Birkhäuser Verlag: Basel, Switzerland, 1988. [Google Scholar]
- Brogliato, B. Nonsmooth Impact Mechanics. In Models, Dynamics and Control; Springer: London, UK, 1996. [Google Scholar]
- Akhmet, M. Principles of Discontinuous Dynamical Systems; Springer: New York, NY, USA, 2010. [Google Scholar]
- Nedeljkov, M.; Oberguggenberger, M. Ordinary differential equations with delta function terms. Publ. de L’institut Mathématique 2012, 91, 125–135. [Google Scholar] [CrossRef]
- Kumar, V.; Singh, S.K.; Kumar, V.; Jamshed, W.; Nisar, K.S. Thermal and thermo-hydraulic behaviour of alumina-graphene hybrid nanofluid in minichannel heat-sink: An experimental study. Int. J. Energy Res. 2021, 45, 20700–20714. [Google Scholar] [CrossRef]
- Cola, V.S.D.; Cuomo, S.; Severino, G. Remarks on the approximation of Dirac delta functions. Results Appl. Math. 2021, 12, 100200. [Google Scholar] [CrossRef]
- Indelman, P. Steady-state source flow in heterogeneous porous media. Trans. Porous Media 2001, 45, 105–127. [Google Scholar] [CrossRef]
- Cveticanin, L. Strongly Nonlinear Oscillators, 233 Undergraduate Lecture Notes in Physics/L. Cveticanin; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Taqqu, M.; Willinger, W.; Sherman, R. Proof of a fundamental result in self–similar traffic modelling. Comput. Commun. Rev. 1997, 27, 5–23. [Google Scholar] [CrossRef]
- Medykovsky, M.; Droniuk, I.; Nazarkevich, M.; Fedevych, O. Modelling the perturbation of traffic based on Ateb-functions. In International Conference on Computer Networks; Springer: Lwowek Slaski, Poland, 2013; pp. 38–44. [Google Scholar]
- Vrabel, R. Non-resonant non-hyperbolic singularly perturbed Neumann problem. Axioms 2022, 11, 394. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Xu, Z. Adaptive Stabilization for Cascaded PDE-ODE Systems with a Wide Class of Input Disturbances; IEEE: Piscataway, NJ, USA, 2019; Volume 7, pp. 29563–29574. [Google Scholar]






























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bagchi, S. Analysis of Finite Solution Spaces of Second-Order ODE with Dirac Delta Periodic Forcing. Axioms 2023, 12, 85. https://doi.org/10.3390/axioms12010085
Bagchi S. Analysis of Finite Solution Spaces of Second-Order ODE with Dirac Delta Periodic Forcing. Axioms. 2023; 12(1):85. https://doi.org/10.3390/axioms12010085
Chicago/Turabian StyleBagchi, Susmit. 2023. "Analysis of Finite Solution Spaces of Second-Order ODE with Dirac Delta Periodic Forcing" Axioms 12, no. 1: 85. https://doi.org/10.3390/axioms12010085
APA StyleBagchi, S. (2023). Analysis of Finite Solution Spaces of Second-Order ODE with Dirac Delta Periodic Forcing. Axioms, 12(1), 85. https://doi.org/10.3390/axioms12010085