
A Novel Decomposition-Based Multi-Objective Evolutionary Algorithm with Dual-Population and Adaptive Weight Strategy

Abstract
:1. Introduction
2. Previous Knowledge
2.1. Problem Model
2.2. Dominance Relationship and Crowding Degree
2.3. Method of Decomposition
- Weighted Sum approach: The weight vector is used as a coefficient corresponding to the objective function one by one, and the mathematical formula is shown as below:where is the aggregate function that needs to be minimized. The idea of the decomposition method is simple, and it is only applicable to the regular Pareto front, and the effect is poor when dealing with problems with a complex Pareto front.
- Tchebycheff approach: The decomposition method formula of this method is shown as below:where is the aggregate function that needs to be minimized, and is a set of reference points satisfying . For any Pareto optimal solution x, there will be a set of weight vector which makes x become the optimal solution in the Tchebycheff equation. This method can be used to obtain different Pareto optimal solutions by changing the weight vector. Because this method has a good effect on most problems, has universality, and is easy to implement, so in the experimental part, this paper chooses the Tchebycheff decomposition method.
- Penalty-based Boundary Intersection approach: This method attempts to find the intersection point between a group of rays passing through the target space from an ideal point and the Pareto front. If these rays are uniformly distributed, then the intersection points found will be approximately uniformly distributed:where is the aggregate function that needs to be minimized, is the penalty parameter, and the meaning of is the same as the Tchebycheff approach. Let y be the projection point of on the ray, with as the origin and as the direction vector, then is the distance between y and , and is the distance between y and . When using this method, the penalty parameter is very important, and the setting of will directly determine the final performance of the algorithm. However, when solving practical problems, it is difficult to determine the size of parameter at the beginning, and so this method is not used in the experimental part of this paper.
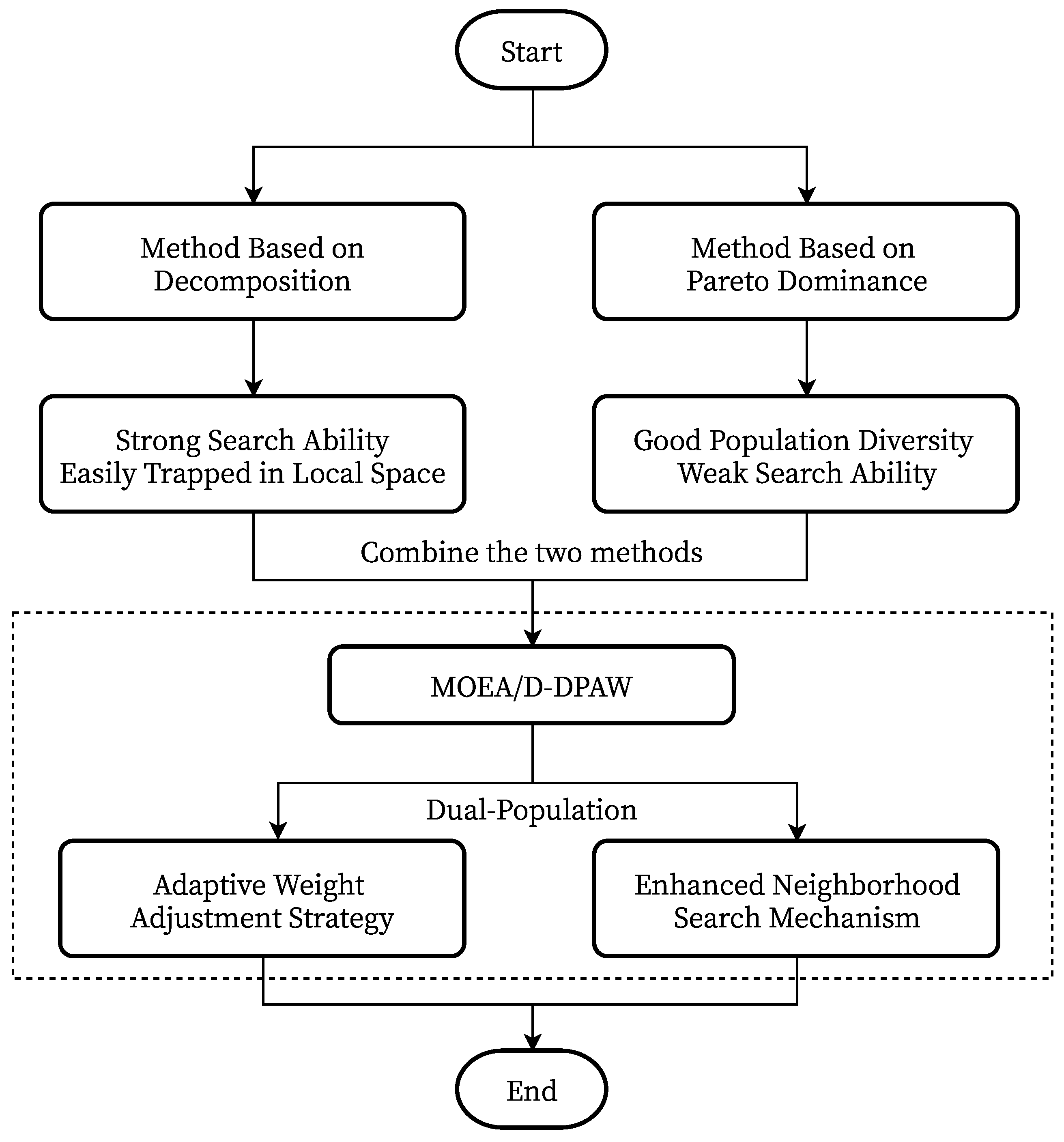
3. Proposed Algorithm
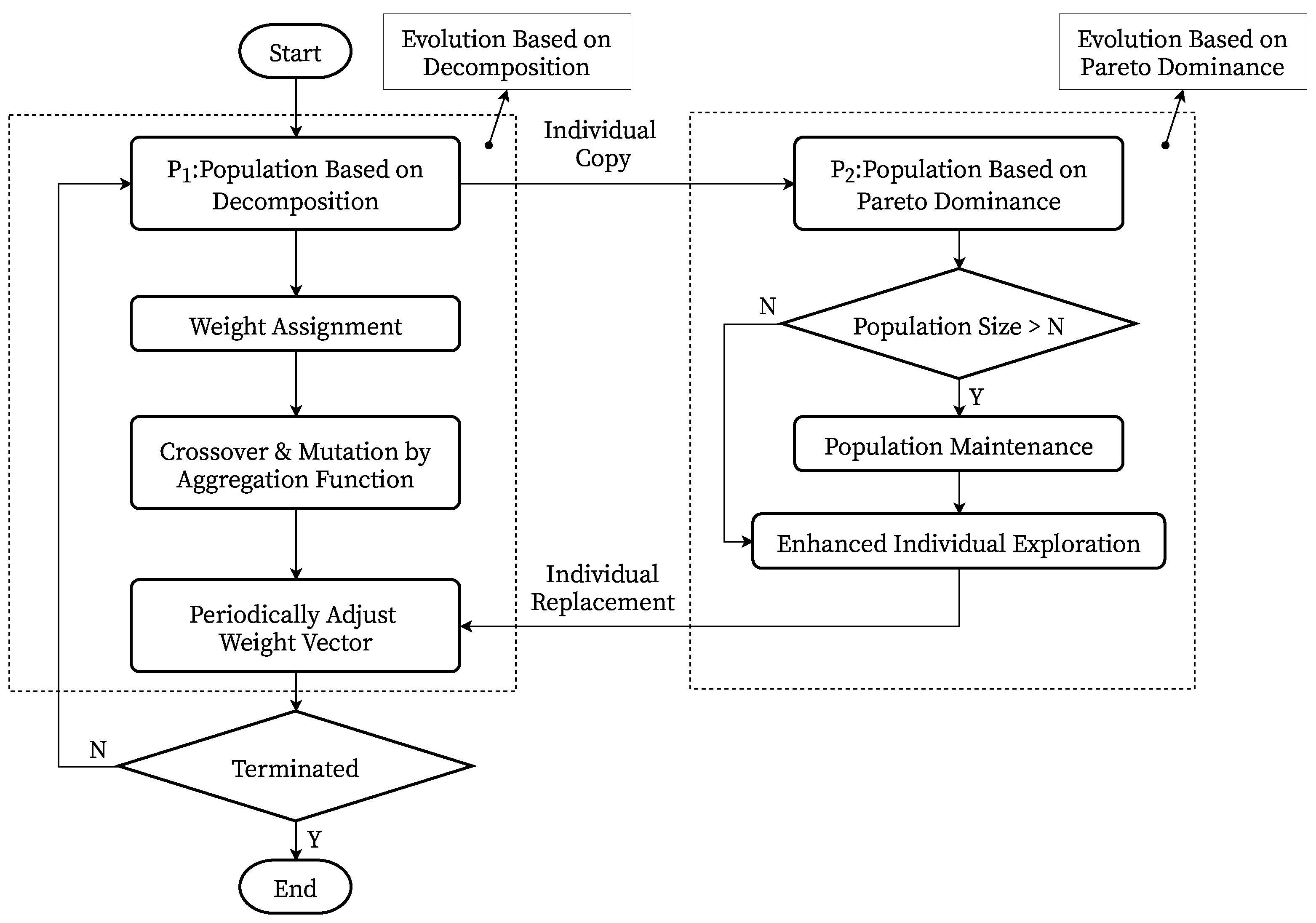
3.1. Framework
| Algorithm 1 MOEA/D-DPAW |
|
3.2. Adaptive Weight Strategy
| Algorithm 2 Adaptive Weight Strategy |
|
3.3. Enhanced Neighborhood Exploration Mechanism
| Algorithm 3 Enhanced Individual Exploration |
|
3.4. Computational Complexity
4. Experiment and Analysis
4.1. Experimental Setup
4.2. Method of Comparison
- AGEMOEA [25]: A method based on non-Euclidean distance is used to estimate the geometric structure of the Pareto frontier, and the diversity and population density are dynamically adjusted to achieve a good convergence effect.
- MOEA/D-URAW [26]: A variant of the MOEA/D algorithm, which uses a uniform random weight generation method and an adaptive weight method based on population sparsity to solve complex multi-objective optimization problems.
- NSGA-II-SDR [27]: A variant of the NSGA-II algorithm, based on the angle between the candidate solutions, proposes an adaptive niche technique that identifies only the best convergent candidate solutions as non-dominant solutions in each niche, thus better balancing the convergence and diversity of evolutionary multi-objective optimization.
- CMOPSO [28]: An improvement of the multi-objective particle swarm optimization algorithm, which uses a multi-objective particle swarm optimization algorithm based on competition mechanism. Particles are updated on the basis of each generation of population competition.
- MOEA/D-DAE [29]: A variant of the MOEA/D algorithm, which uses the detection escape strategy to detect the algorithm stagnation state by using the feasible ratio and the overall constraint violation change rate, and then adjusts the constraint violation weight in time to guide the population search out of the stagnation state.
4.3. Performance Metric
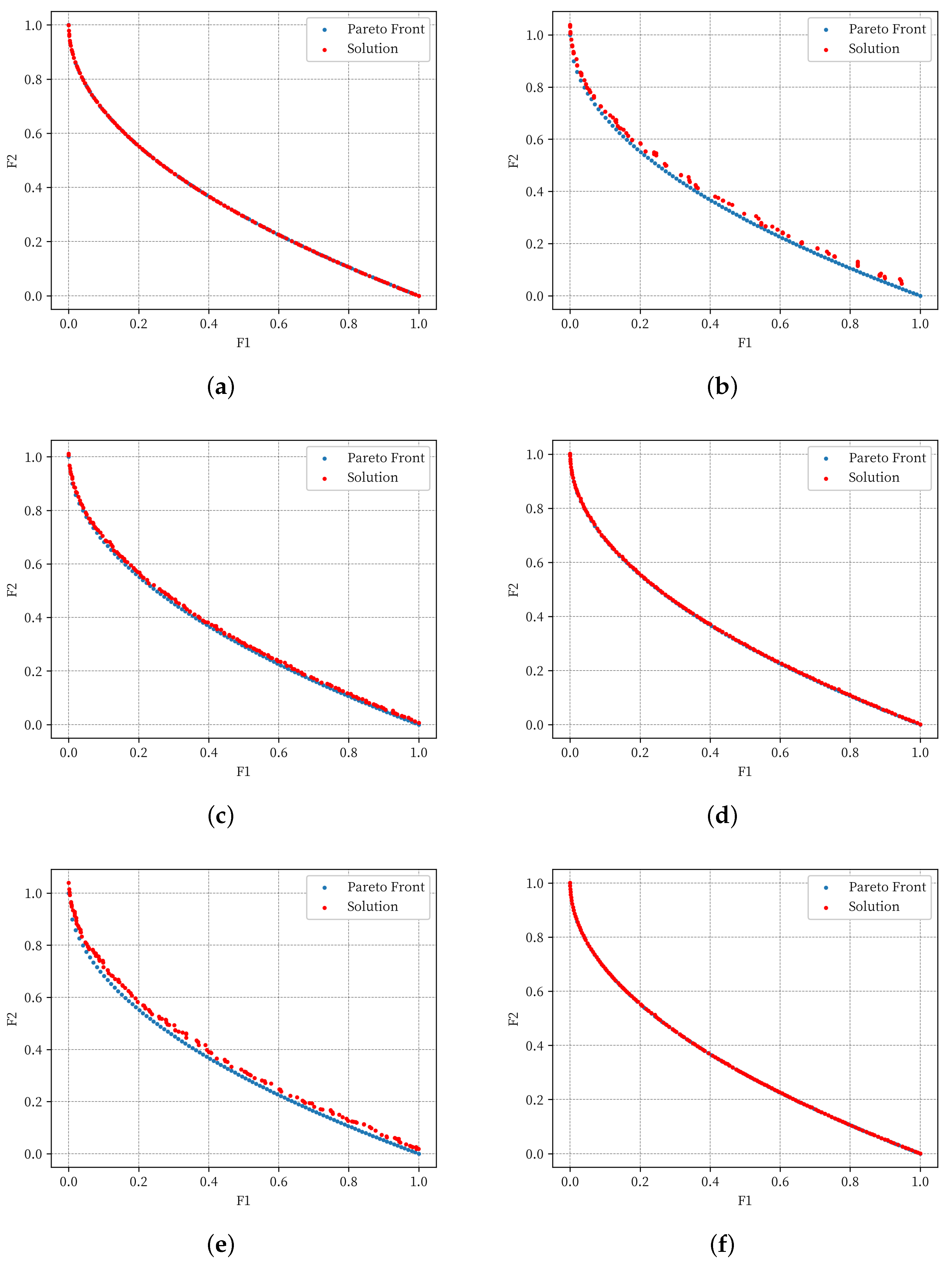
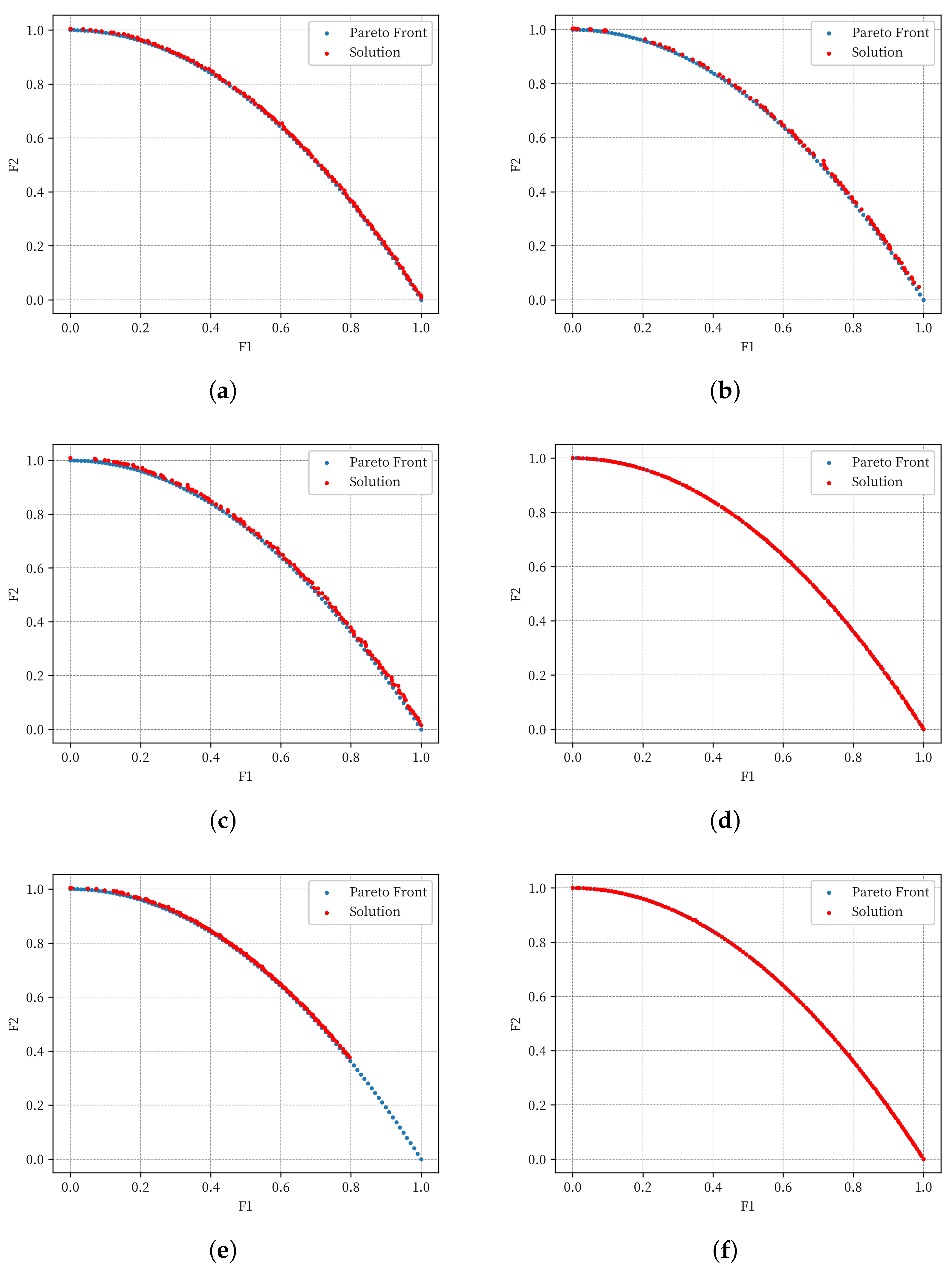
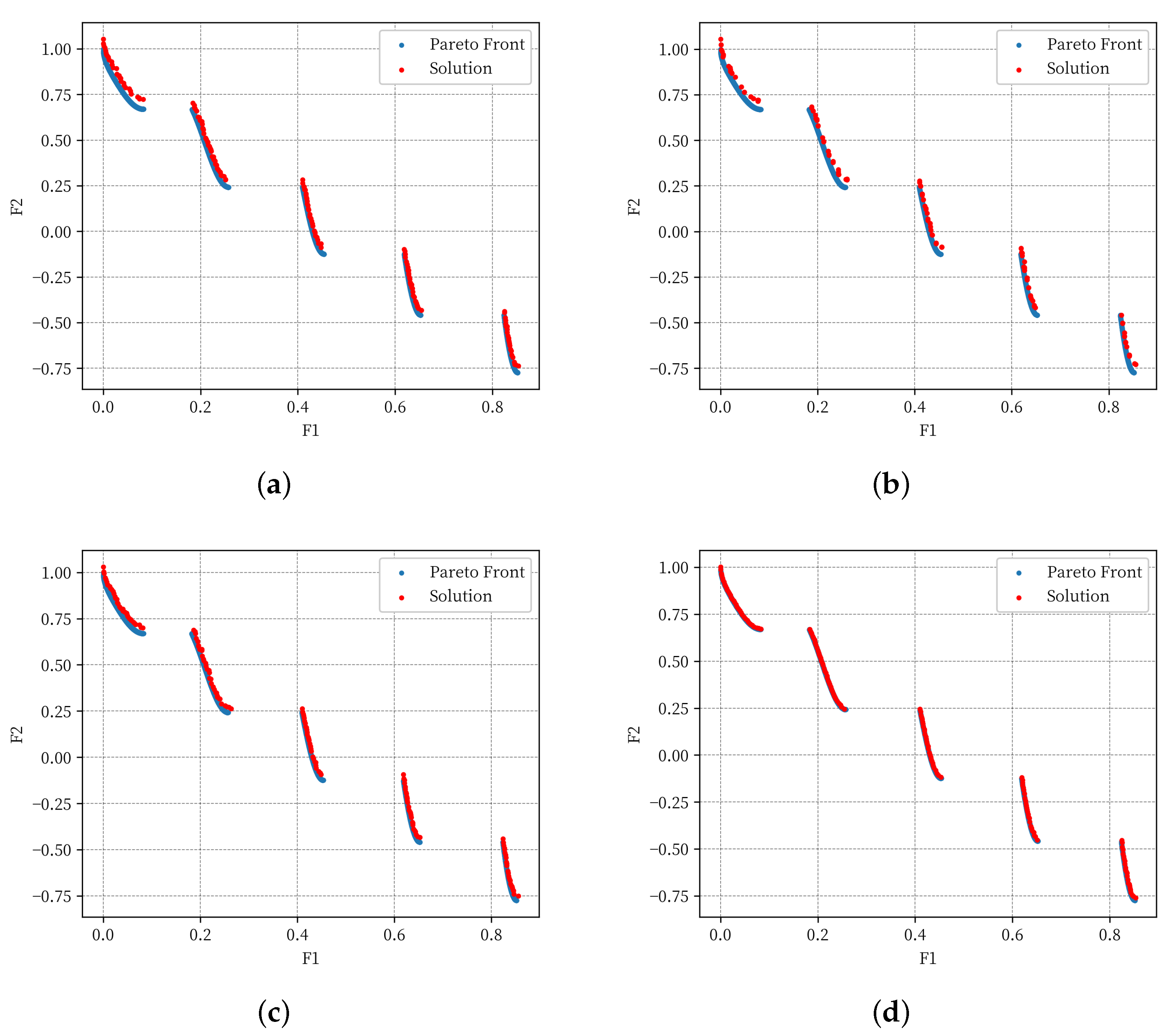
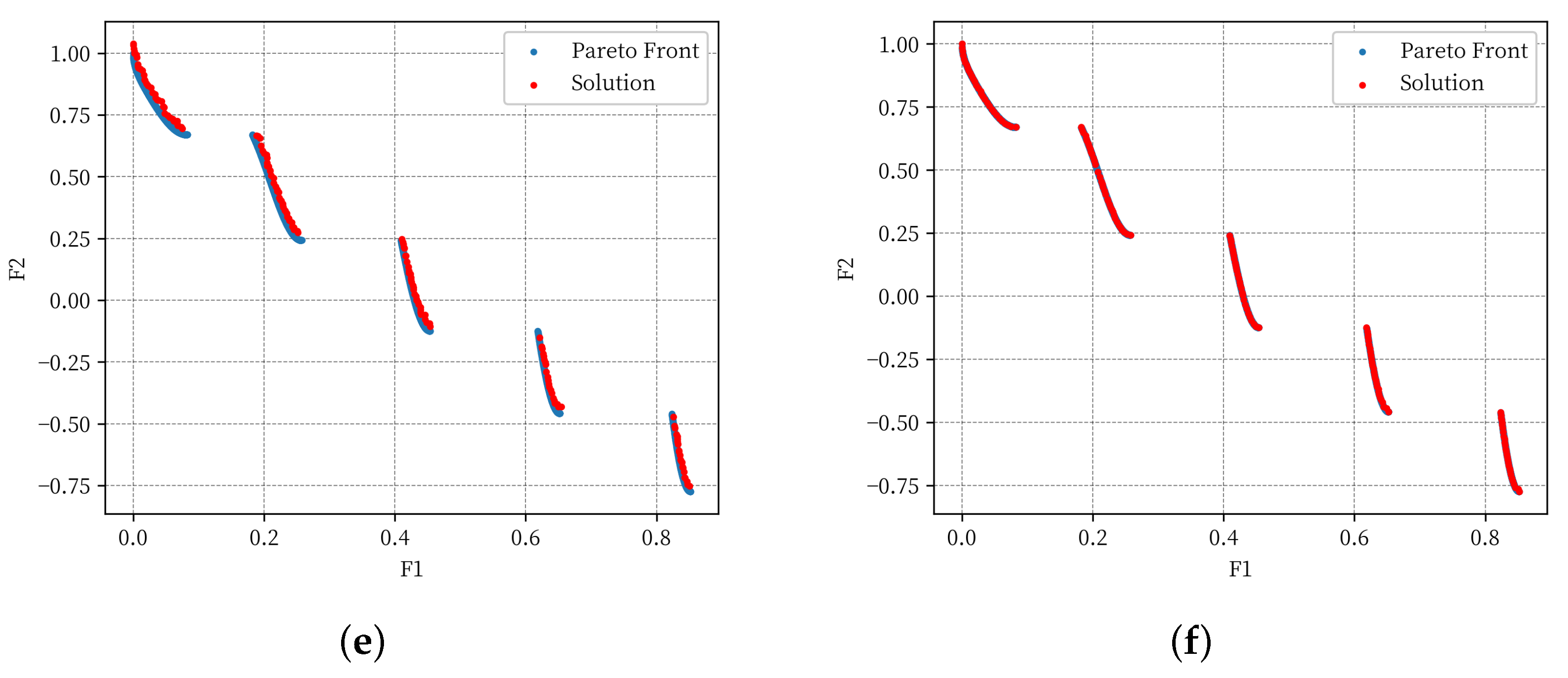
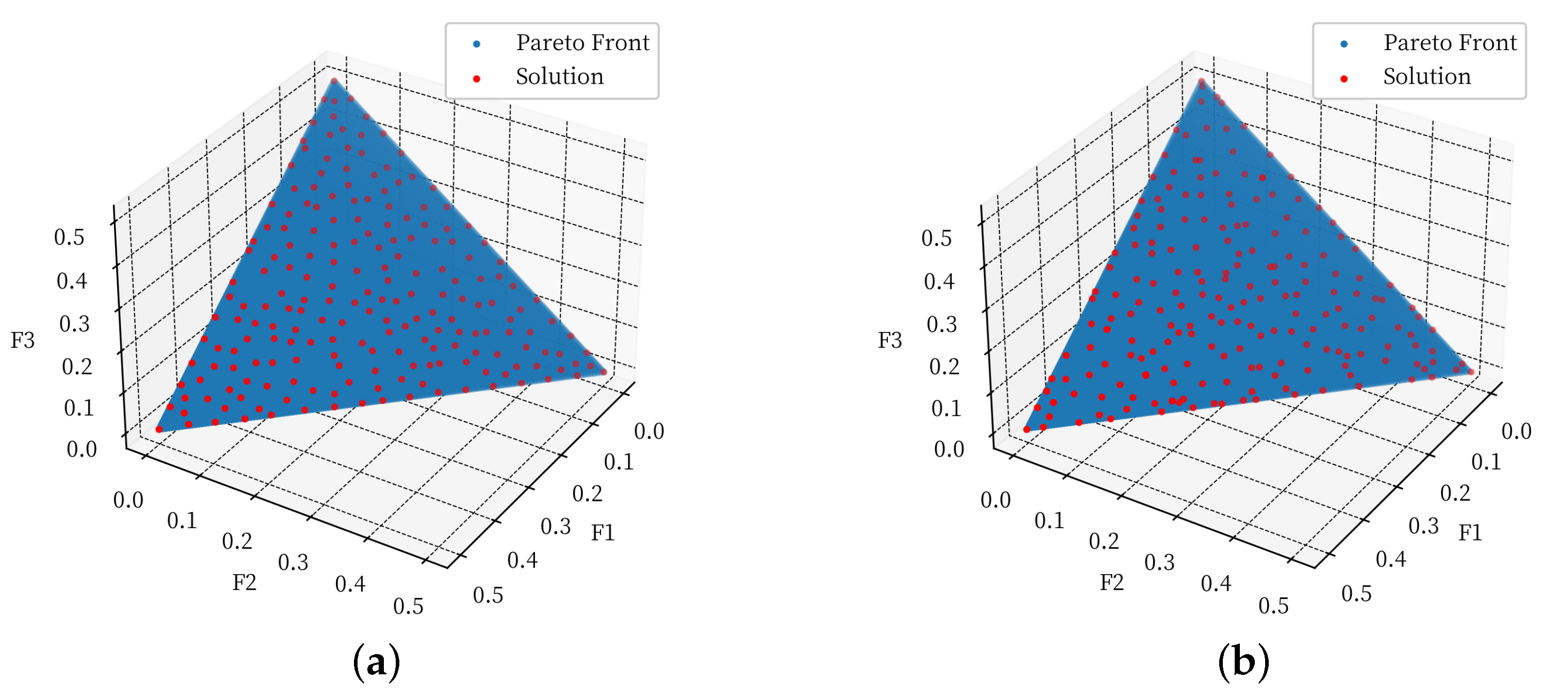
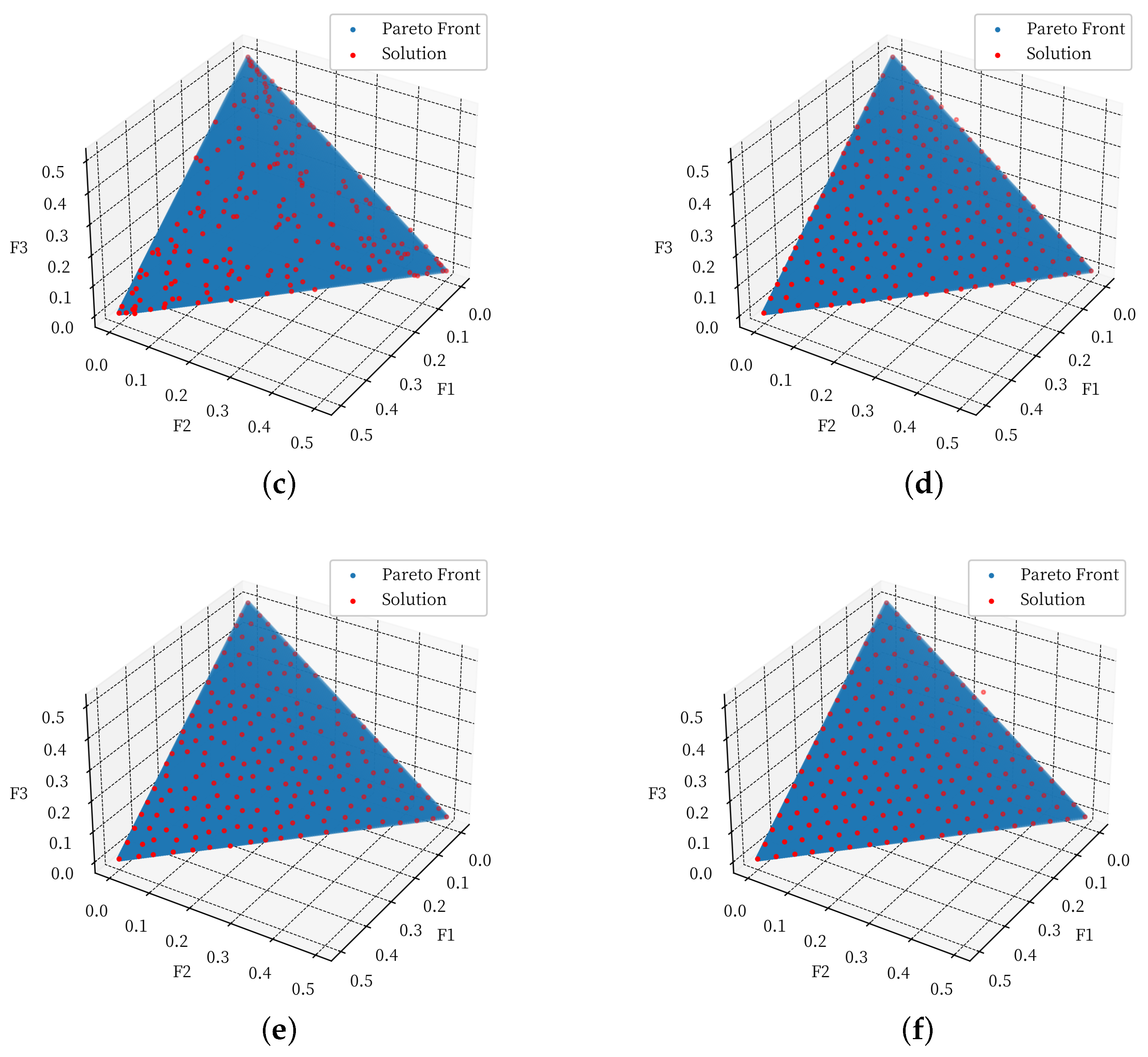
4.4. Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Deb, K.; Jain, H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints. IEEE Trans. Evol. Comput. 2013, 18, 577–601. [Google Scholar] [CrossRef]
- Yuan, M.; Li, Y.; Zhang, L.; Pei, F. Research on intelligent workshop resource scheduling method based on improved NSGA-II algorithm. Robot. Comput. Integr. Manuf. 2021, 71, 102141. [Google Scholar] [CrossRef]
- Pan, L.; Xu, W.; Li, L.; He, C.; Cheng, R. Adaptive simulated binary crossover for rotated multi-objective optimization. Swarm Evol. Comput. 2021, 60, 100759. [Google Scholar] [CrossRef]
- Yi, J.H.; Deb, S.; Dong, J.; Alavi, A.H.; Wang, G.G. An improved NSGA-III algorithm with adaptive mutation operator for Big Data optimization problems. Future Gener. Comput. Syst. 2018, 88, 571–585. [Google Scholar] [CrossRef]
- Cui, Z.; Chang, Y.; Zhang, J.; Cai, X.; Zhang, W. Improved NSGA-III with selection-and-elimination operator. Swarm Evol. Comput. 2019, 49, 23–33. [Google Scholar] [CrossRef]
- Gu, Z.M.; Wang, G.G. Improving NSGA-III algorithms with information feedback models for large-scale many-objective optimization. Future Gener. Comput. Syst. 2020, 107, 49–69. [Google Scholar] [CrossRef]
- Sun, Y.; Yen, G.G.; Yi, Z. IGD indicator-based evolutionary algorithm for many-objective optimization problems. IEEE Trans. Evol. Comput. 2018, 23, 173–187. [Google Scholar] [CrossRef] [Green Version]
- Hong, W.; Tang, K.; Zhou, A.; Ishibuchi, H.; Yao, X. A scalable indicator-based evolutionary algorithm for large-scale multiobjective optimization. IEEE Trans. Evol. Comput. 2018, 23, 525–537. [Google Scholar] [CrossRef]
- Yuan, J.; Liu, H.L.; Ong, Y.S.; He, Z. Indicator-Based Evolutionary Algorithm for Solving Constrained Multiobjective Optimization Problems. IEEE Trans. Evol. Comput. 2021, 26, 379–391. [Google Scholar] [CrossRef]
- Li, W.; Zhang, T.; Wang, R.; Ishibuchi, H. Weighted indicator-based evolutionary algorithm for multimodal multiobjective optimization. IEEE Trans. Evol. Comput. 2021, 25, 1064–1078. [Google Scholar] [CrossRef]
- Li, H.R.; He, F.Z.; Yan, X.H. IBEA-SVM: An indicator-based evolutionary algorithm based on pre-selection with classification guided by SVM. Appl. Math. J. Chin. Univ. 2019, 34, 1–26. [Google Scholar] [CrossRef]
- García, J.L.L.; Monroy, R.; Hernández, V.A.S.; Coello, C.A.C. COARSE-EMOA: An indicator-based evolutionary algorithm for solving equality constrained multi-objective optimization problems. Swarm Evol. Comput. 2021, 67, 100983. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, H. MOEA/D: A multiobjective evolutionary algorithm based on decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, G.G.; Li, K.; Yeh, W.C.; Jian, M.; Dong, J. Enhancing MOEA/D with information feedback models for large-scale many-objective optimization. Inf. Sci. 2020, 522, 1–16. [Google Scholar] [CrossRef]
- Cao, Z.; Liu, C.; Wang, Z.; Jia, H. An Improved MOEA/D Framework with Multoperator Strategies for Multi-objective Optimization Problems with a Large Scale of Variables. In Proceedings of the 2021 IEEE Congress on Evolutionary Computation (CEC), Kraków, Poland, 28 June–1 July 2021; pp. 2164–2170. [Google Scholar]
- Wang, W.X.; Li, K.S.; Tao, X.Z.; Gu, F.H. An improved MOEA/D algorithm with an adaptive evolutionary strategy. Inf. Sci. 2020, 539, 1–15. [Google Scholar] [CrossRef]
- Xie, Y.; Yang, S.; Wang, D.; Qiao, J.; Yin, B. Dynamic Transfer Reference Point-Oriented MOEA/D Involving Local Objective-Space Knowledge. IEEE Trans. Evol. Comput. 2022, 26, 542–554. [Google Scholar] [CrossRef]
- Chen, L.; Pang, L.M.; Ishibuchi, H. New Solution Creation Operator in MOEA/D for Faster Convergence. In Proceedings of the International Conference on Parallel Problem Solving from Nature, Dortmund, Germany, 10–14 September 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 234–246. [Google Scholar]
- Zhang, Y.; He, L.; Yang, J.; Zhu, G.; Jia, X.; Yan, W. Multi-objective optimization design of a novel integral squeeze film bearing damper. Machines 2021, 9, 206. [Google Scholar] [CrossRef]
- Akbari, V.; Naghashzadegan, M.; Kouhikamali, R.; Afsharpanah, F.; Yaïci, W. Multi-Objective Optimization of a Small Horizontal-Axis Wind Turbine Blade for Generating the Maximum Startup Torque at Low Wind Speeds. Machines 2022, 10, 785. [Google Scholar] [CrossRef]
- Jiang, R.; Ci, S.; Liu, D.; Cheng, X.; Pan, Z. A hybrid multi-objective optimization method based on NSGA-II algorithm and entropy weighted TOPSIS for lightweight design of dump truck carriage. Machines 2021, 9, 156. [Google Scholar] [CrossRef]
- Qi, Y.; Ma, X.; Liu, F.; Jiao, L.; Sun, J.; Wu, J. MOEA/D with adaptive weight adjustment. Evol. Comput. 2014, 22, 231–264. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tian, Y.; Cheng, R.; Zhang, X.; Jin, Y. PlatEMO: A MATLAB platform for evolutionary multi-objective optimization [educational forum]. IEEE Comput. Intell. Mag. 2017, 12, 73–87. [Google Scholar] [CrossRef] [Green Version]
- Panichella, A. An adaptive evolutionary algorithm based on non-Euclidean geometry for many-objective optimization. In Proceedings of the GECCO ’19: Genetic and Evolutionary Computation Conference, Prague, Czech Republic, 13–17 July 2019; pp. 595–603. [Google Scholar]
- Farias, L.R.; Araújol, A.F. Many-objective evolutionary algorithm based on decomposition with random and adaptive weights. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 3746–3751. [Google Scholar]
- Tian, Y.; Cheng, R.; Zhang, X.; Su, Y.; Jin, Y. A strengthened dominance relation considering convergence and diversity for evolutionary many-objective optimization. IEEE Trans. Evol. Comput. 2018, 23, 331–345. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Zheng, X.; Cheng, R.; Qiu, J.; Jin, Y. A competitive mechanism based multi-objective particle swarm optimizer with fast convergence. Inf. Sci. 2018, 427, 63–76. [Google Scholar] [CrossRef]
- Zhu, Q.; Zhang, Q.; Lin, Q. A constrained multiobjective evolutionary algorithm with detect-and-escape strategy. IEEE Trans. Evol. Comput. 2020, 24, 938–947. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AGEMOEA | MOEA/D-URAW | NSGA-II-SDR | CMOPSO | MOEA/D-DAE | MOEA/D-DPAW | |
|---|---|---|---|---|---|---|
| ZDT1 | − | − | − | − | − | |
| ZDT2 | − | − | − | + | − | |
| ZDT3 | − | − | − | − | = | |
| ZDT4 | − | − | − | = | − | |
| ZDT6 | − | − | − | + | + | |
| UF1 | − | − | − | − | − | |
| UF2 | − | − | − | − | − | |
| UF3 | − | = | = | + | = | |
| UF4 | = | − | − | − | − | |
| UF5 | + | − | − | = | + | |
| UF6 | − | − | − | − | − | |
| UF7 | − | − | + | + | = | |
| +/−/≈ | 1/10/1 | 0/11/1 | 1/10/1 | 4/6/2 | 2/7/3 |
| AGEMOEA | MOEA/D-URAW | NSGA-II-SDR | CMOPSO | MOEA/D-DAE | MOEA/D-DPAW | |
|---|---|---|---|---|---|---|
| ZDT1 | − | − | − | = | = | |
| ZDT2 | − | − | − | = | = | |
| ZDT3 | − | = | − | = | = | |
| ZDT4 | = | − | − | = | = | |
| ZDT6 | − | − | − | = | = | |
| UF1 | = | − | = | + | + | |
| UF2 | − | − | − | − | − | |
| UF3 | − | − | = | + | + | |
| UF4 | = | − | − | − | − | |
| UF5 | − | − | − | − | − | |
| UF6 | − | − | − | − | − | |
| UF7 | = | − | + | + | − | |
| +/−/≈ | 0/8/4 | 0/11/1 | 1/9/2 | 3/4/5 | 2/5/5 |
| AGEMOEA | MOEA/D-URAW | NSGA-II-SDR | CMOPSO | MOEA/D-DAE | MOEA/D-DPAW | |
|---|---|---|---|---|---|---|
| DTLZ1 | = | − | − | + | + | |
| DTLZ2 | − | − | − | = | − | |
| DTLZ3 | + | − | − | + | + | |
| DTLZ4 | − | − | − | − | − | |
| DTLZ5 | − | − | − | − | − | |
| DTLZ6 | − | − | − | + | + | |
| DTLZ7 | − | − | − | − | − | |
| UF8 | − | − | − | − | − | |
| UF9 | = | − | − | − | − | |
| UF10 | = | − | − | − | = | |
| +/−/≈ | 1/6/3 | 0/10/0 | 0/10/0 | 3/6/1 | 3/6/1 |
| AGEMOEA | MOEA/D-URAW | NSGA-II-SDR | CMOPSO | MOEA/D-DAE | MOEA/D-DPAW | |
|---|---|---|---|---|---|---|
| DTLZ1 | + | − | − | + | + | |
| DTLZ2 | − | − | − | − | − | |
| DTLZ3 | + | − | − | − | + | |
| DTLZ4 | − | − | − | − | − | |
| DTLZ5 | = | = | − | + | + | |
| DTLZ6 | = | − | = | + | + | |
| DTLZ7 | − | − | − | + | + | |
| UF8 | − | − | − | − | − | |
| UF9 | = | − | − | − | − | |
| UF10 | + | − | + | − | = | |
| +/−/≈ | 3/4/3 | 0/9/1 | 1/8/1 | 4/6/0 | 5/4/1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, Q.; Kang, X. A Novel Decomposition-Based Multi-Objective Evolutionary Algorithm with Dual-Population and Adaptive Weight Strategy. Axioms 2023, 12, 100. https://doi.org/10.3390/axioms12020100
Ni Q, Kang X. A Novel Decomposition-Based Multi-Objective Evolutionary Algorithm with Dual-Population and Adaptive Weight Strategy. Axioms. 2023; 12(2):100. https://doi.org/10.3390/axioms12020100
Chicago/Turabian StyleNi, Qingjian, and Xuying Kang. 2023. "A Novel Decomposition-Based Multi-Objective Evolutionary Algorithm with Dual-Population and Adaptive Weight Strategy" Axioms 12, no. 2: 100. https://doi.org/10.3390/axioms12020100
APA StyleNi, Q., & Kang, X. (2023). A Novel Decomposition-Based Multi-Objective Evolutionary Algorithm with Dual-Population and Adaptive Weight Strategy. Axioms, 12(2), 100. https://doi.org/10.3390/axioms12020100