1. Introduction
For a long time, fractional calculus was considered to be a purely mathematical field with no real applications. Recently, however, this has changed. Think, for example, of all the problems where it is important to describe the behaviour and evolution of the function over a period of time and not just at a specific point in time. Think, for example, of materials with memory. Fractional calculus is, therefore, particularly important for studying and solving this type of problem.
Many researchers have found that fractional derivatives are suitable for mathematical modelling of physical problems such as diffusion in biological tissues [
1,
2,
3], propagation in porous media [
4], anomalous diffusion [
5,
6,
7], viscoelasticity [
8,
9,
10,
11], and earthquakes [
12]. Fractional calculus has also been considered for pandemic models [
13,
14,
15] or in finance [
16].
Since the fractional derivate involves an integral, many authors use quadrature formulae or discrete derivatives [
17] to approximate the fractional derivative. Others use Galerkin methods [
18,
19] or spectral methods [
20].
In our previous works [
21,
22], we proved that if we collocate the fractional differential problem in dyadic nodes and we use the B-splines as approximation functions, we obtain a collocation method that works very well. Moreover, the method takes advantage of the refinability and derivability properties of the B-splines in order to produce an accurate and efficient algorithm. Indeed, the fractional derivatives of the B-splines appearing in the collocation matrix satisfy a closed form involving fractional B-splines of lower orders. In this paper, we used this collocation method, generalised to a wider class of approximating refinable functions [
23], and we used this method to numerically solve a fractional dynamical system. By using these fractional functions instead of fractional B-splines, we have more degrees of freedom in the choice of the regularity. For all these reasons, the collocation method stands out as a particularly useful and attractive tool for the solution of fractional differential problems of different forms [
24].
The paper is structured as follows: In the first section, we describe the fractional dynamical systems and we define the fractional derivatives in several meaningful ways. In the second section, fractional refinable functions are introduced, as well as their main properties. The most-important property in the context of this paper, i.e., the fractional differential rule, is treated in the third section, as well as the way to differentiate the left-edge B-splines in the fractional sense. In the following section, a Multiresolution Analysis (MRA) on the semi-bounded interval
is introduced. The fractional collocation method is then introduced, specifying the entries of the collocation matrix, and a numerical test is provided in the last section. We compare one of the other results obtained using several B-splines and fractional B-splines in [
18,
21,
25,
26].
2. Fractional Dynamical Systems
Consider the following fractional dynamical system:
where
, and
.
In this context,
denotes the Caputo fractional derivative with respect to the time
t defined as
where
k is an integer such that
and
is the Riemann–Liouville integral operator given by
In the above equation,
denotes Euler’s gamma function:
Through the Gamma function, it is possible to define the generalised binomial coefficients:
If is a positive integer, the above definition and the usual definition of the binomial coefficient coincide, while they are infinitely supported if or zero if .
However, they decay to infinity as [
27]
We note that, when the homogeneous initial conditions are imposed on the function
, the Caputo definition (
2) coincides with the Riemann–Liouville definition:
which requires less regularity on
, and both reduce to the usual differential operator in the case of
[
28].
In the following, we will make use of
, and so, we will need the following theorem, already proven in [
22].
Theorem 1. Let γ be a real number such that then Proof. Denote
, then
. Therefore,
After changing the variable in the integral, we obtain
□
In the next section, we introduce a new collocation method, the multi-scale collocation method, which takes advantage of multi-scale techniques to produce an efficient and accurate algorithm.
3. Fractional Cardinal B-Splines and Fractional GP Functions
In the paper [
27], the extension of the class of the cardinal B-splines to the fractional ones is provided by introducing the concept of the fractional finite difference operator. The starting point is the definition of the classical cardinal B-spline, i.e., the B-spline on integer knots. Consider the truncated power function:
and the finite difference operator:
Then, the classical B-spline of integer-order
n is defined by the formula:
From this definition, the Fourier transform of
becomes
Due to the definition of generalised binomial coefficients, the definition (
4) can be extended to a real index
. Hence, using the fractional finite difference operator:
we can define the fractional B-spline of order
:
It is also easy to prove that
Thus, due to the finite fractional differential rule [
22]:
we can say that the fractional derivative of a B-spline is a fractional B-spline.
It easy to prove that the Fourier transform of
becomes
A similar theory can be developed for the fractional derivatives of a class of refinable functions compactly supported in
, called Gori–Pitolli (GP) refinable functions, depending on a real parameter
. These functions are denoted by
. Their fractional derivatives are fractional GP refinable functions, i.e., GP refinable functions with non-integer-order
:
(see
Figure 1). See [
23,
25,
26,
29] for more details.
In
Figure 1a, the fractional GP functions are plotted for
= 2:0.25:6 and
. It is possible to see the continuous dependence of the family on the index
and the interpolation with the fractional B-splines of [
27] when
.
Instead, when , each B-spline looks like the corresponding one of degrees less than 2.
The same observations can be made for
Figure 1b, where
; here, the fractional functions are more similar to the fractional B-splines.
In both cases, the support of the fractional GP function looks like , where .
4. Multiresolution Analysis on and on
Let be a sequence of closed subspaces of . The sequence forms a multiresolution analysis (MRA) of if:
- (i)
;
- (ii)
;
- (iii)
;
- (iv)
, ;
- (v)
There exists an -stable basis in .
An MRA can be generated by a refinable function, i.e., a function defined through a refinement mask
and a refinement equation, as follows:
Suitable conditions on the mask coefficients
ensure the existence of a unique function
solution to (
6), which belongs to
and such that their integer translates
form an
-stable basis in
(see [
30] for details). As a consequence, the refinable function
generates all the spaces
through dilation and translation, i.e.,
Let
denote the restriction of
to the semi-infinite interval
. Thus,
is generated by suitable functions
, i.e., with
:
It is possible to prove that
still generate an MRA on
[
22].
5. The Fractional Derivative of B-Splines
In this section, we want to analyse the application of the fractional relation (
5) to the B-splines in
, in particular for the left-edge functions. Let
be the support of the cardinal B-spline
. Let us consider
Note that, for the
whose support is entirely contained in
I, the index
k is greater than or equal to zero, while the left-edge B-splines have index
. Thus, the following two theorems state the adapted differentiation relation for both types. First, we state a theorem for the exact calculation of some integrals involved in the integration of the B-splines derivative. By (
6), we have
and for the derivative,
If the index
, we have the left-edge B-splines. To determine the fractional derivative of these functions, for
and
, we use the difference between the whole integral
, which is known, and the part before zero,
:
where
By summing and subtracting the index
k and using the change of the variable
, we obtain the following equation:
Therefore, (
7) can be rewritten as
The calculus of the fractional derivatives can be reduced to evaluating .
Theorem 2. For , for the B-splines with all the support in , one haswhile for the left B-splines,whereby the second term has the following recurrence relation: Proof. For the B-splines contained in
, we have
By summing and subtracting
k and by setting
, we have
Since
, we have
This is the first thesis.
As for the second thesis, we remember that
is written as
Putting it in (
7) and setting
, we obtain
which is the sum of only the first
terms.
The integration rules for rational functions are
□
6. The Fractional Collocation Method
Let j be fixed, and for simplicity, we ignore the dependence of j.
In the theory, we are looking for a vector of approximating functions in
, i.e.,
which solves the differential problem (
1) on a set of
collocation points.
In practice, since
have a fast decay, the series reduces to a finite number of terms:
where
and
are given by
and
Let
be the coefficient matrix and
Therefore, we can rewrite (
8) in matrix form:
Using the linearity of
and (
8), we obtain
where
If we choose as collocation points the
dyadic nodes that are defined by
,
, then
By (
9) and (
10), (
11) becomes
Using the Kronecker product, we obtain the following linear algebraic system:
where
denotes the vectorisation of the matrix X, formed by stacking the columns of X into a single column vector.
In the next section, we will solve a specific test problem numerically.
7. Numerical Results
In the test, we used the cubic B-spline as an approximation function.
Therefore, we define the spaces:
where
is the set of admissible indices
k and
is the initial multiresolution scale.
It is not difficult to prove that these spaces produce an MRA on
. See [
25] for more details.
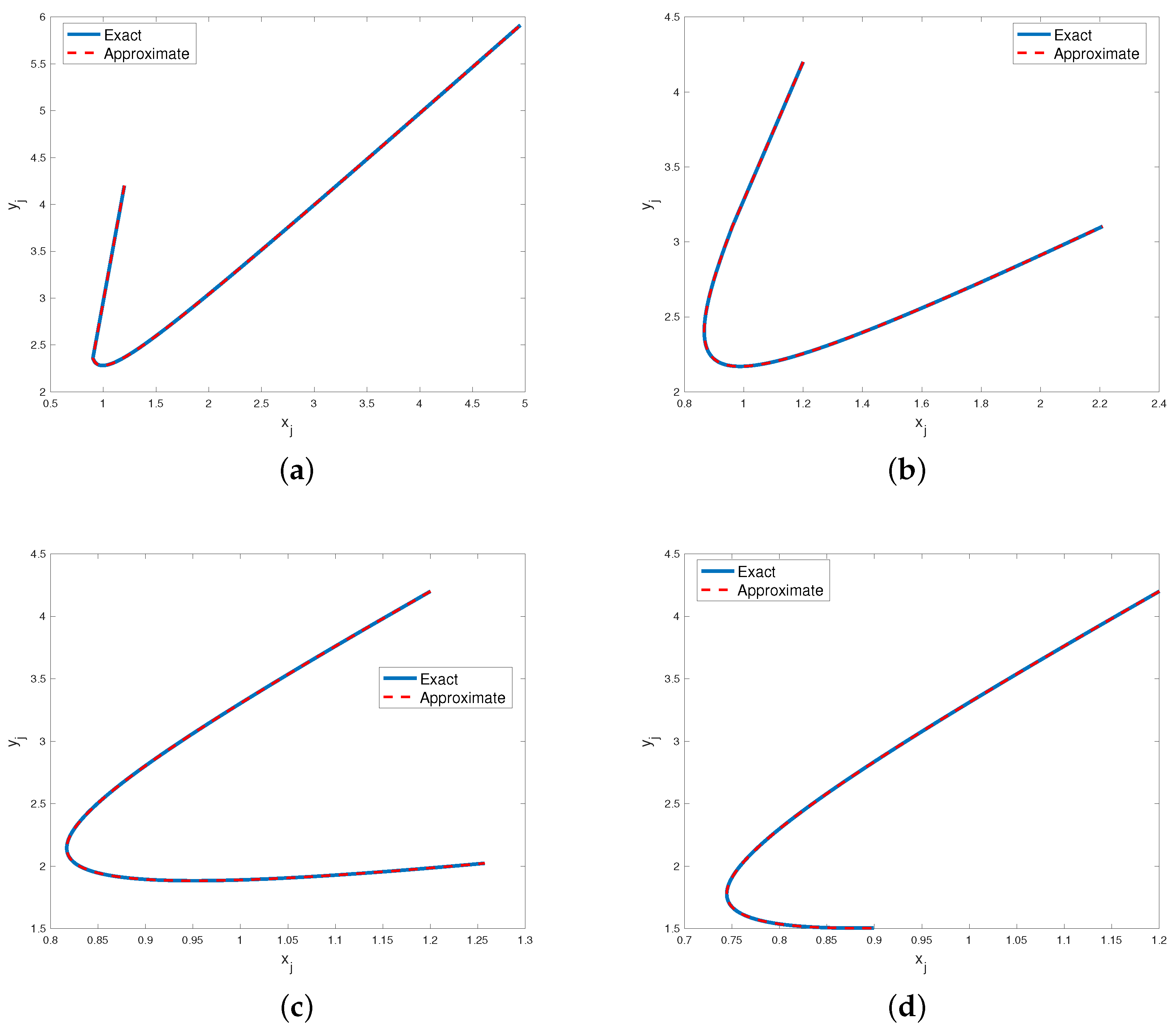
Now, we consider the following example of a fractional dynamical system in two dimensions:
where
and whose exact solution is [
31]
is the Mittag–Leffler function, i.e.,
We note that the matrix associated with the dynamical system has eigenvalues
such that
, so that the stability of the system is guaranteed [
32].
Using the collocation method with
and
, we numerically solved the dynamic system in the interval
, and we compared it with the exact solution (
Figure 2). As expected, the error is of the order of the machine precision.
8. Conclusions and Future Work
We constructed a collocation method that uses fractional refinable functions as approximate functions, to solve a fractional non-stationary dynamical system. We provided an explicit formula that allowed us to evaluate the fractional derivatives of the approximate functions in an accurate and simple way. This formula uses a linear combination of fractional refinable functions of minor order to obtain the prescribed derivative. The method can be efficiently implemented by using standard multiscale techniques to evaluate the fractional B-splines and least mean squares for the final rectangular system. The numerical results showed that this collocation method approximates the solution of a test fractional system with good accuracy. In the future, we can use, as approximation functions, the fractional refinable functions described in [
29]. The central point of the work is that this efficient technique can be extended to any fractional differential problem.
Author Contributions
Conceptualization, L.P. and S.D.L.; methodology, L.P. and S.D.L.; software, S.D.L.; writing—original draft preparation, L.P. and S.D.L.; writing—review and editing, L.P. and S.D.L.; funding acquisition, L.P. All authors have read and agreed to the published version of the manuscript.
Funding
The APC was payed using the fund “00300_22_RS_PEZZA_SEED_PNR_2022-PEZZA-ATENEO SEED PNR 2022”.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Magin, R.L. Fractional calculus models of complex dynamics in biological tissues. Comput. Math. Appl. 2010, 59, 1586–1593. [Google Scholar] [CrossRef]
- Magin, R.L.; Ingo, C.; Colon-Perez, L.; Triplett, W.; Mareci, T.H. Characterization of anomalous diffusion in porous biological tissues using fractional order derivatives and entropy. Microporous Mesoporous Mater. 2013, 178, 39–43. [Google Scholar] [CrossRef] [PubMed]
- Hodaei, M.; Rabbani, V.; Maghoul, P. Transient acoustic wave propagation in bone-like porous materials using the theory of poroelasticity and fractional derivative: A sensitivity analysis. Acta Mech. 2020, 231, 179–203. [Google Scholar] [CrossRef]
- Fellah, M.; Fellah, Z.; Depollier, C. Transient wave propagation in inhomogeneous porous materials: Application of fractional derivatives. Signal Process. 2006, 86, 2658–2667. [Google Scholar] [CrossRef]
- Magin, R.L.; Abdullah, O.; Baleanu, D.; Zhou, X.J. Anomalous diffusion expressed through fractional order differential operators in the Bloch–Torrey equation. J. Magn. Reson. 2008, 190, 255–270. [Google Scholar] [CrossRef]
- Chen, W.; Sun, H.; Zhang, X.; Korošak, D. Anomalous diffusion modeling by fractal and fractional derivatives. Comput. Math. Appl. 2010, 59, 1754–1758. [Google Scholar] [CrossRef]
- Xiao-Jun, Y.; Tenreiro Machado, J.; Baleanu, D. Anomalous diffusion models with general fractional derivatives within the kernels of the extended Mittag-Leffler type functions. Rom. Rep. Phys. 2017, 69, 115. [Google Scholar]
- Bagley, R.L.; Torvik, P. A theoretical basis for the application of fractional calculus to viscoelasticity. J. Rheol. 1983, 27, 201–210. [Google Scholar] [CrossRef]
- Torvik, P.; Bagley, R. On the Appearance of the Fractional Derivative in the Behavior of Real Materials. J. Appl. Mech. 1984, 51, 294–298. [Google Scholar] [CrossRef]
- Heymans, N.; Bauwens, J.C. Fractal rheological models and fractional differential equations for viscoelastic behavior. Rheol. Acta 1994, 33, 210–219. [Google Scholar] [CrossRef]
- Chatterjee, A. Statistical origins of fractional derivatives in viscoelasticity. J. Sound Vib. 2005, 284, 1239–1245. [Google Scholar] [CrossRef]
- Pelap, F.; Tanekou, G.; Fogang, C.; Kengne, R. Fractional-order stability analysis of earthquake dynamics. J. Geophys. Eng. 2018, 15, 1673–1687. [Google Scholar] [CrossRef]
- Zeraick Monteiro, N.; Rodrigues Mazorche, S. Fractional derivatives applied to epidemiology. Trends Comput. Appl. Math. 2021, 22, 157–177. [Google Scholar] [CrossRef]
- Butt, A.I.K.; Imran, M.; Batool, S.; Nuwairan, M.A. Theoretical Analysis of a COVID-19 CF-Fractional Model to Optimally Control the Spread of Pandemic. Symmetry 2023, 15, 380. [Google Scholar] [CrossRef]
- Hanif, A.; Kashif Butt, A.I.; Ahmad, W. Numerical approach to solve Caputo-Fabrizio-fractional model of corona pandemic with optimal control design and analysis. Math. Methods Appl. Sci. 2023. [Google Scholar] [CrossRef]
- Ali, I.; Khan, S.U. A Dynamic Competition Analysis of Stochastic Fractional Differential Equation Arising in Finance via Pseudospectral Method. Mathematics 2023, 11, 1328. [Google Scholar] [CrossRef]
- Zeng, F.; Li, C.; Liu, F.; Turner, I. The use of finite difference/element approaches for solving the time-fractional subdiffusion equation. SIAM J. Sci. Comput. 2013, 35, A2976–A3000. [Google Scholar] [CrossRef]
- Pezza, L.; Pitolli, F. A fractional wavelet Galerkin method for the fractional diffusion problem. IMACS Ser. Comput. Appl. Math 2017, 20, 1–10. [Google Scholar]
- Li, X.; Xu, C. Existence and uniqueness of the weak solution of the space-time fractional diffusion equation and a spectral method approximation. Commun. Comput. Phys. 2010, 8, 1016. [Google Scholar]
- Pedas, A.; Tamme, E. On the convergence of spline collocation methods for solving fractional differential equations. J. Comput. Appl. Math. 2011, 235, 3502–3514. [Google Scholar] [CrossRef]
- Pitolli, F.; Pezza, L. A fractional spline collocation method for the fractional-order logistic equation. In Approximation Theory XV: San Antonio 2016; Springer: Cham, Switzerland, 2017; pp. 307–318. [Google Scholar]
- Pellegrino, E.; Pezza, L.; Pitolli, F. A collocation method in spline spaces for the solution of linear fractional dynamical systems. Math. Comput. Simul. 2020, 176, 266–278. [Google Scholar] [CrossRef]
- Pezza, L.; Tallini, L. Some Results on a New Refinable Class Suitable for Fractional Differential Problems. Fractal Fract. 2022, 6, 521. [Google Scholar] [CrossRef]
- Mazza, M.; Donatelli, M.; Manni, C.; Speleers, H. On the matrices in B-spline collocation methods for Riesz fractional equations and their spectral properties. Numer. Linear Algebra Appl. 2023, 30, e2462. [Google Scholar] [CrossRef]
- Pezza, L.; Pitolli, F. A multiscale collocation method for fractional differential problems. Math. Comput. Simul. 2017, 147, 210–219. [Google Scholar] [CrossRef]
- Pezza, L.; Pitolli, F. A fractional spline collocation-Galerkin method for the time-fractional diffusion equation. Commun. Appl. Ind. Math. 2018, 9, 104–120. [Google Scholar] [CrossRef]
- Unser, M.; Blu, T. Fractional splines and wavelets. SIAM Rev. 2000, 42, 43–67. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations, Volume 198 of Mathematics in Science and Engineering; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Gori, L.; Pitolli, F. A class of totally positive refinable functions. Rend. Di Mat. Ser. VII 2000, 20, 305–322. [Google Scholar]
- Mallat, S. A Wavelet Tour of Signal Processing; Academic Press, Inc.: San Diego, CA, USA, 1998; p. xxiv+577. [Google Scholar]
- Garrappa, R.; Popolizio, M. Evaluation of generalized Mittag–Leffler functions on the real line. Adv. Comput. Math. 2013, 39, 205–225. [Google Scholar] [CrossRef]
- Kaczorek, T.; Rogowski, K. Fractional Linear Systems and Electrical Circuits; Springer: Cham, Switzerland, 2015. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}
{kind=link}

